
Investigation on a Linear Piezoelectric Actuator Based on Stick-Slip/Scan Excitation




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Construction and Operation Principle
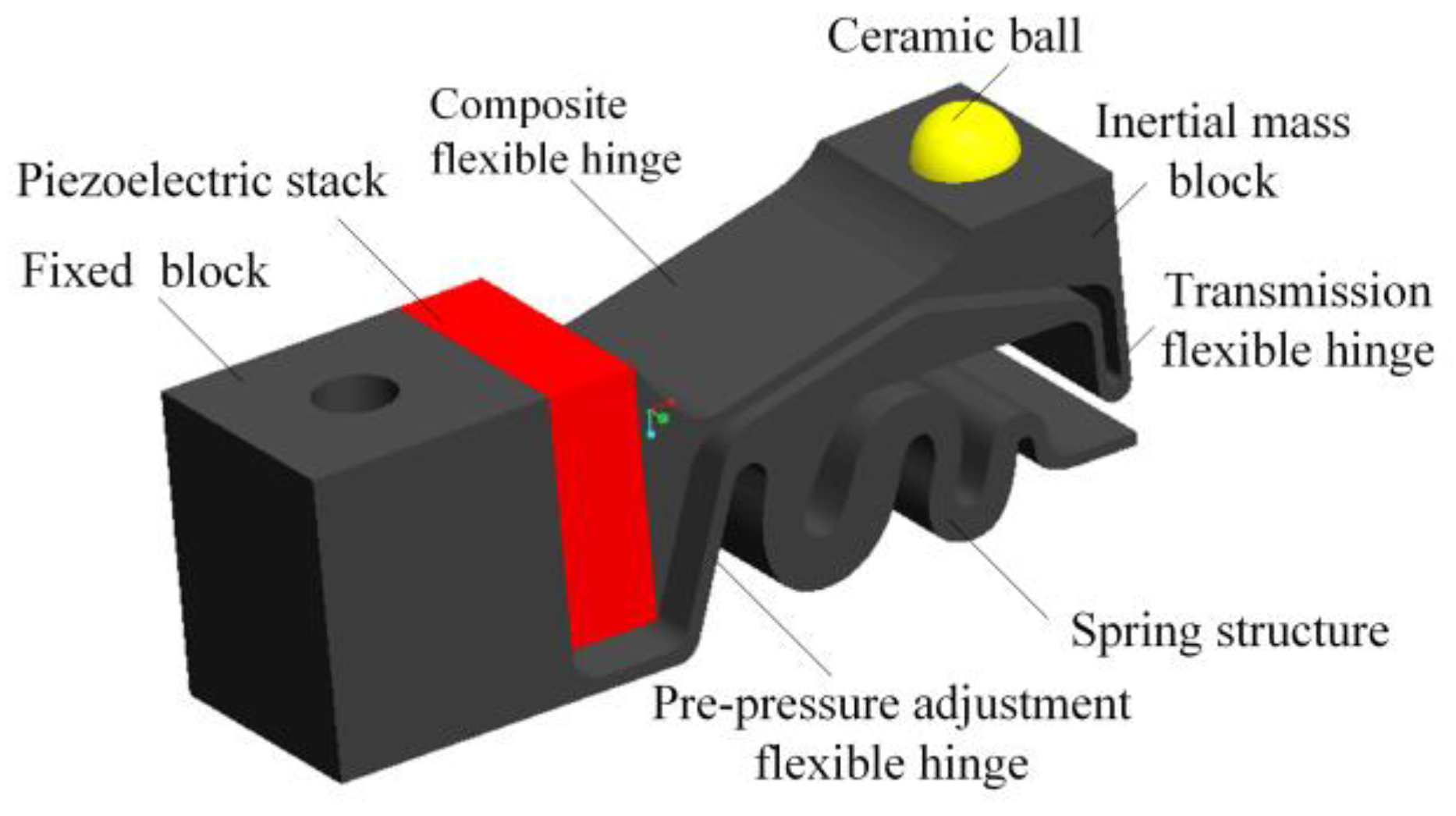
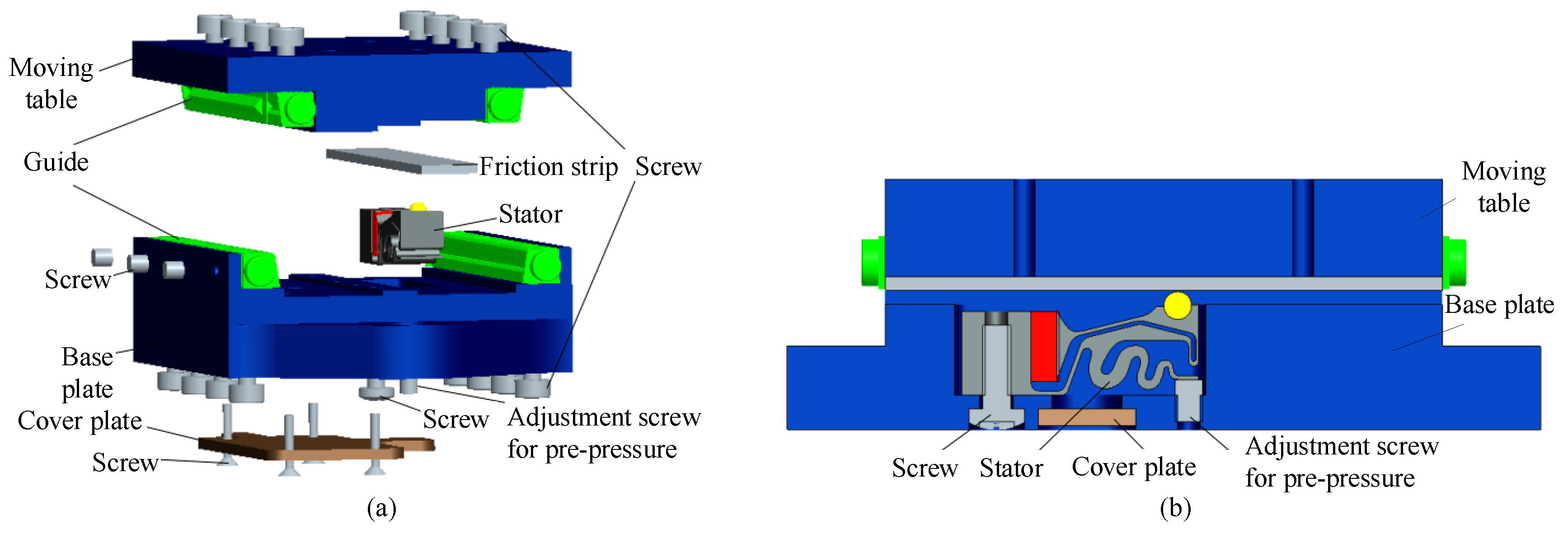
2.1. Construction
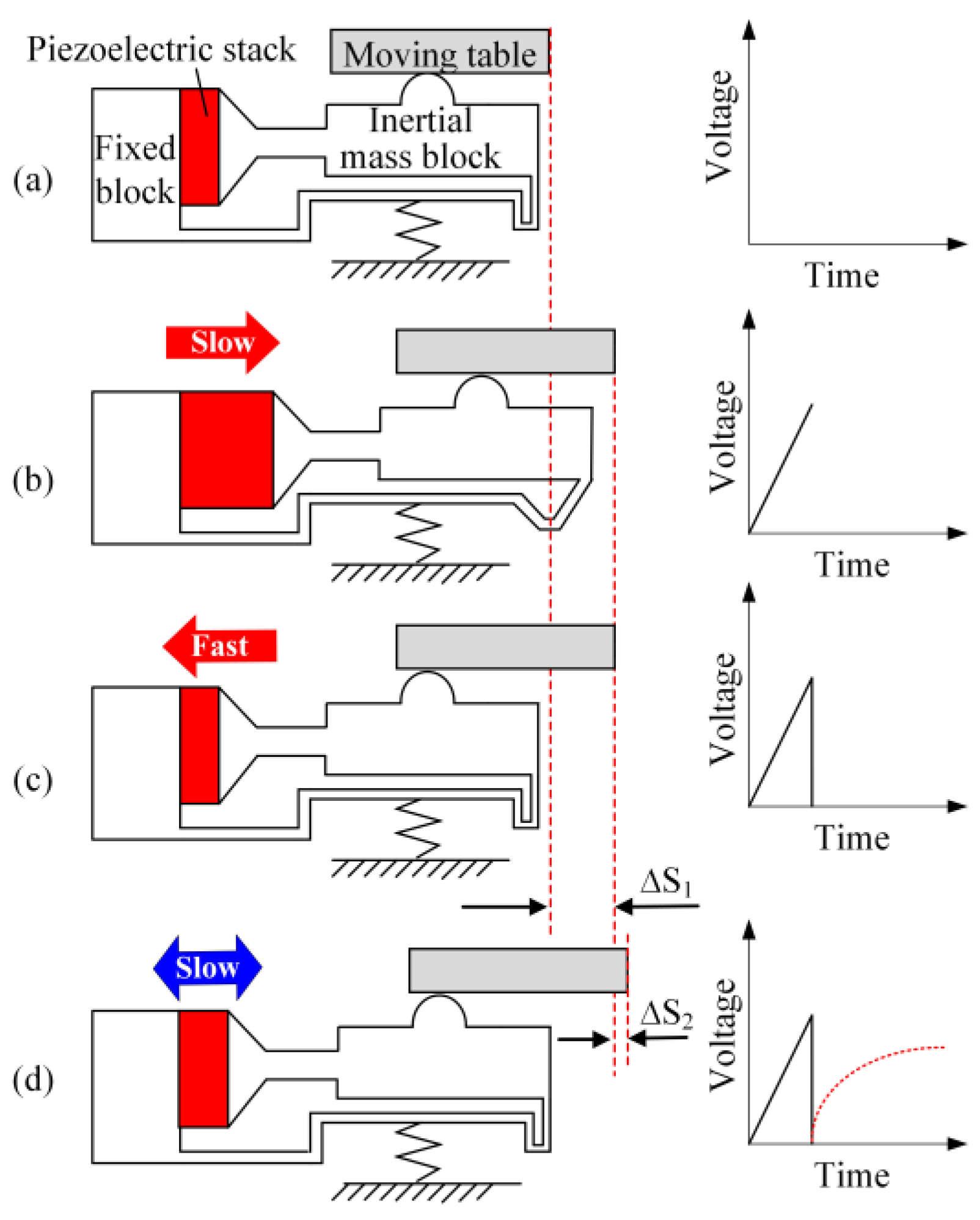
2.2. Operation Principle
3. Actuator Design
3.1. Modeling of Actuator
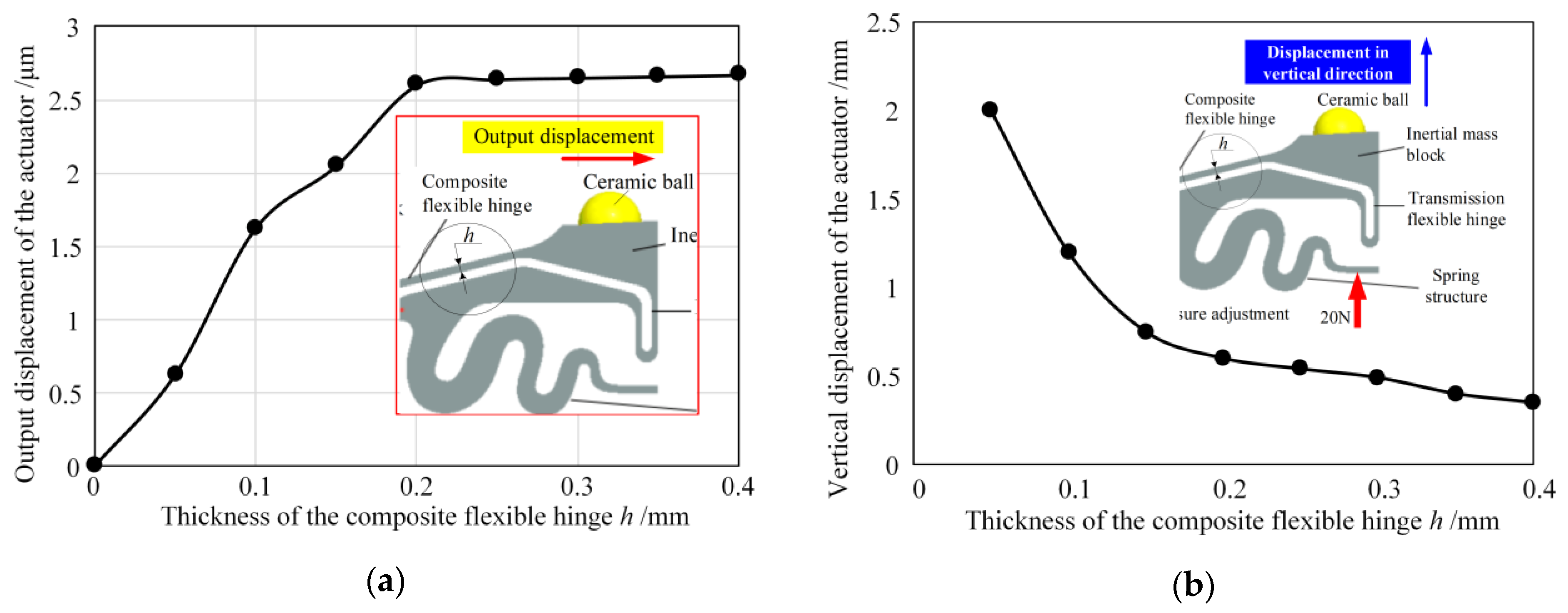
3.2. Composite Hinge Design
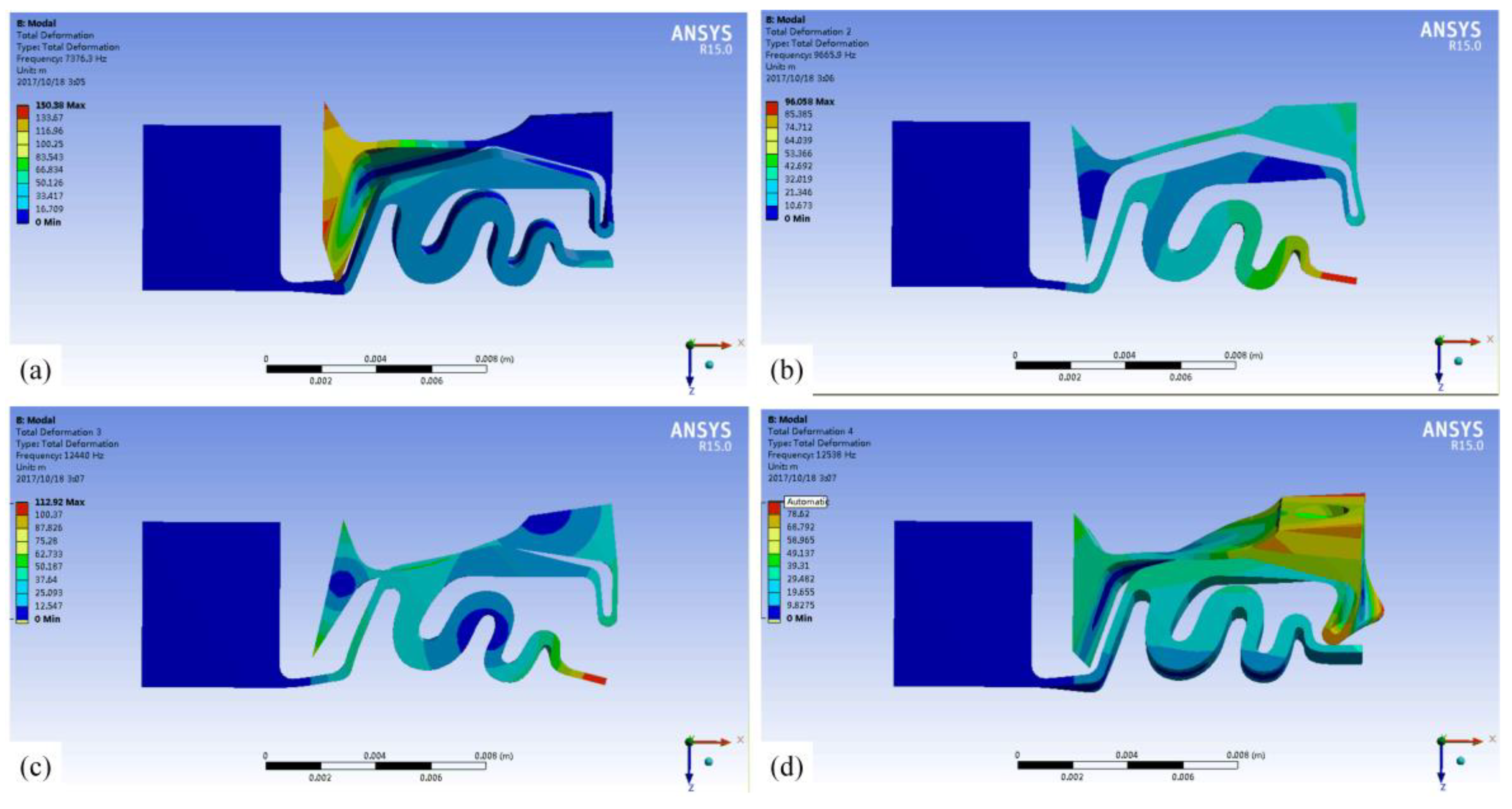
3.3. Model Analysis
3.4. Stiffness Calculation of Transmission Flexible Hinge
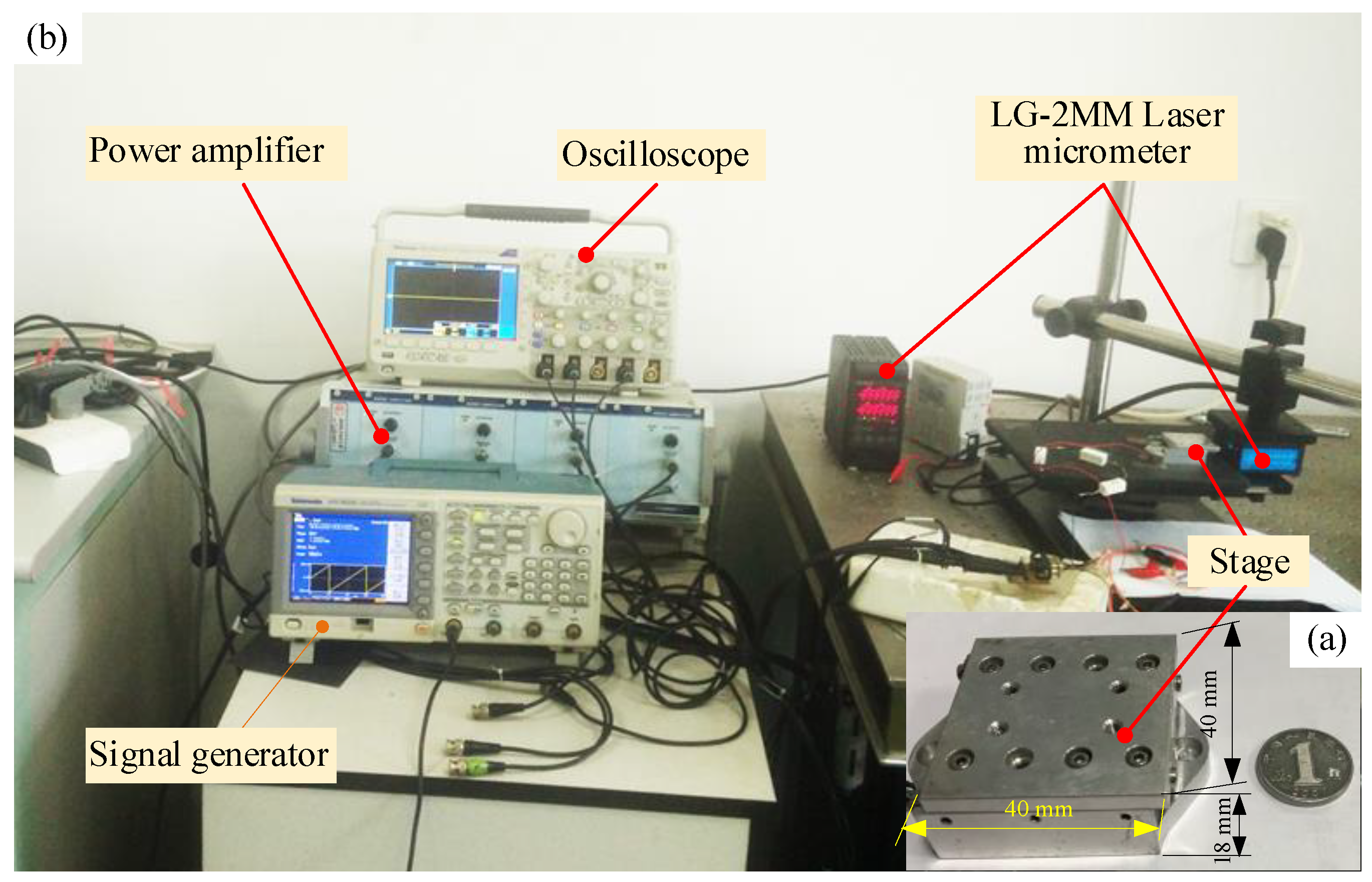
4. Experimental Investigation
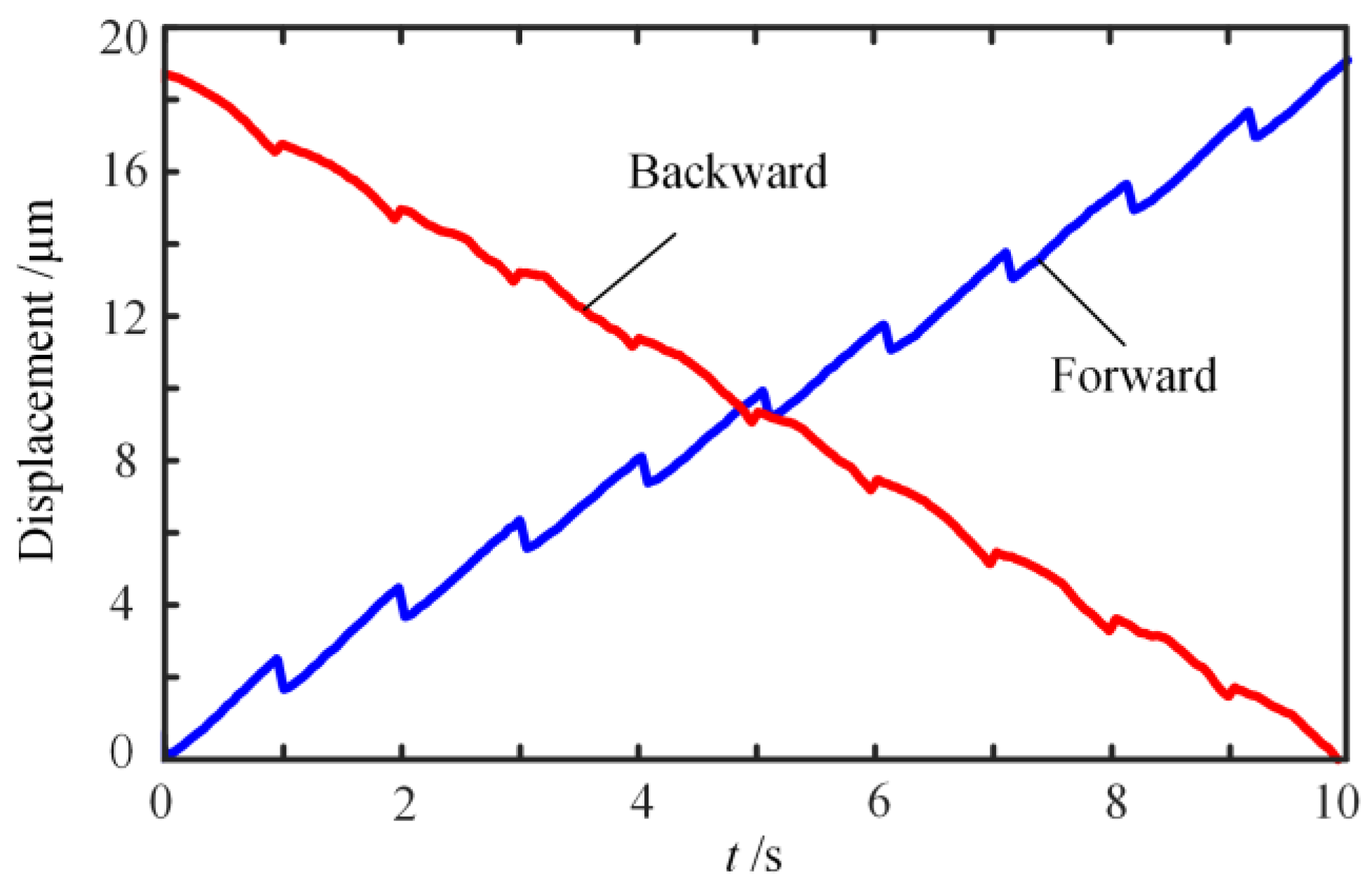
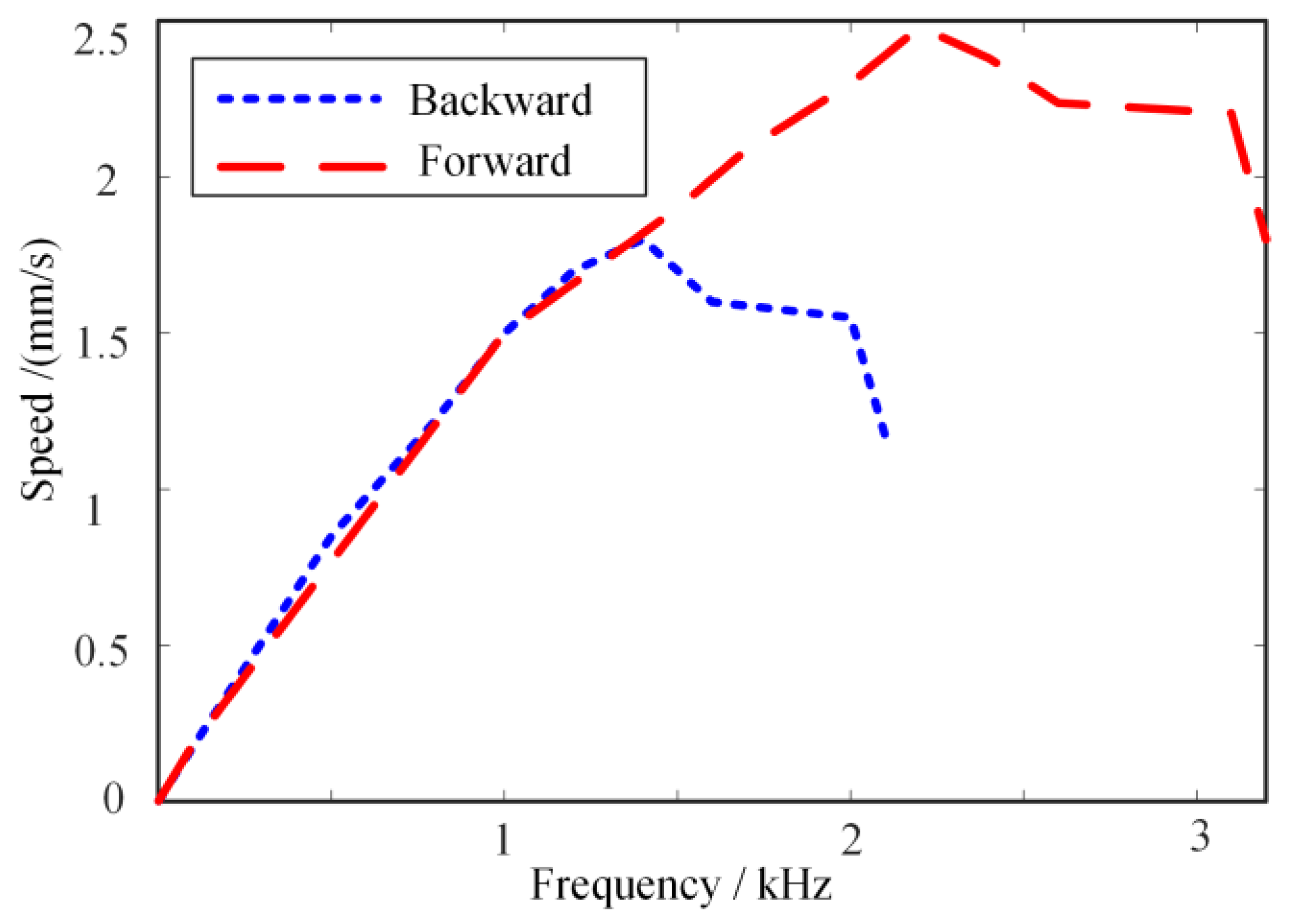
4.1. Running Test of Motion Table in Open Loop
4.2. Resolution Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mohith, S.; Upadhya, A.R.; Karanth, N.; Kulkarni, S.M.; Rao, M. Recent trends in piezoelectric actuators for precision motion and their applications: A review. Smart Mater. Struct. 2021, 30, 013002. [Google Scholar] [CrossRef]
- Zhao, C.S. Ultrasonic Motors Technologies and Applications; Springer: Berlin/Heidelberg, Germany, 2011; pp. 1–10. [Google Scholar] [CrossRef]
- Ouyang, P.R.; Tjiptoprodjo, R.C.; Zhang, W.J.; Yang, G.S. Micro-motion devices technology: The state of arts review. Int. J. Adv. Manuf. Technol. 2008, 38, 463–478. [Google Scholar] [CrossRef]
- Silvestri, M.; Confalonieri, M.; Ferrario, A. Piezoelectric Actuators for Micro Positioning Stages in Automated Machines: Experimental Characterization of Open Loop Implementations. FME Trans. 2017, 45, 331. [Google Scholar] [CrossRef]
- Gao, X.; Yang, J.; Wu, J.; Xin, X.; Li, Z.; Yuan, X.; Shen, X.; Dong, S. Piezoelectric Actuators and Motors: Materials, Designs, and Applications. Adv. Mater. Technol. 2020, 5, 1900716. [Google Scholar] [CrossRef]
- Kiziroglou, M.E.; Temelkuran, B.; Yeatman, E.M.; Yang, G.Z. Micro Motion Amplification—A Review. IEEE Access 2020, 8, 64037–64055. [Google Scholar] [CrossRef]
- Rudy, R.Q.; Smith, G.L.; DeVoe, D.L.; Polcawich, R.G. Millimeter-scale traveling wave rotary ultrasonic motors. J. Microelectromech. Syst. 2015, 24, 108–114. [Google Scholar] [CrossRef]
- Kühne, M.; Rochín, R.G.; Cos, R.S.; Astorga, G.J.R.; Peer, A. Modeling and two-input sliding mode control of rotary traveling wave ultrasonic motors. IEEE Trans. Ind. Electron. 2018, 65, 7149–7159. [Google Scholar] [CrossRef]
- Hareesh, P.; DeVoe, D.L. Miniature bulk PZT traveling wave ultrasonic motors for low-speed high-torque rotary actuation. J. Microelectromech. Syst. 2018, 27, 547–554. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Wielert, T.; Twiefel, J.; Jin, J.; Wallaschek, J. A rod type linear ultrasonic motor utilizing longitudinal traveling waves: Proof of concept. Smart Mater. Struct. 2017, 26, 085013. [Google Scholar] [CrossRef]
- Le, A.Y.; Mills, J.K.; Benhabib, B. Improved linear ultrasonic motor performance with square-wave based driving-tip trajectory. Smart Mater. Struct. 2015, 24, 037003. [Google Scholar] [CrossRef]
- Yue, J.; Zhiyuan, Y.; Bailiang, Z.; Zhen, L. A novel Π-type linear ultrasonic motor driven by a single mode. Rev. Sci. Instrum. 2018, 89, 125010. [Google Scholar] [CrossRef]
- Yin, Z.; Dai, C.; Cao, Z.; Li, W.; Li, C. Modal analysis and moving performance of a single-mode linear ultrasonic motor. Ultrasonics 2020, 108, 106216. [Google Scholar] [CrossRef] [PubMed]
- Izuhara, S.; Mashimo, T. Linear Piezoelectric Motor Using a Hollow Rectangular Stator. Sens. Actuator A Phys. 2020, 309, 112002. [Google Scholar] [CrossRef]
- Xin, X.; Gao, X.; Wu, J.; Li, Z.; Chu, Z.; Dong, S. A ring-shaped, linear piezoelectric ultrasonic motor operating in E-01mode. Appl. Phys. Lett. 2020, 116, 152902. [Google Scholar] [CrossRef]
- Modler, N.; Winkler, A.; Filippatos, A.; Lovasz, E.-C.; Mărgineanu, D. Simulation and experimental investigation of active lightweight compliant mechanisms with integrated piezoceramic actuators. Smart Mater. Struct. 2016, 25, 085047. [Google Scholar] [CrossRef]
- Bharti, S.; Frecker, M.I. Optimal design and experimental characterization of a compliant mechanism piezoelectric actuator for inertially stabilized rifle. J. Intell. Mater. Syst. Struct. 2004, 15, 93–106. [Google Scholar] [CrossRef]
- Sun, X.; Chen, W.; Zhang, J.; Zhou, R.; Chen, W. A novel piezo-driven linear-rotary inchworm actuator. Sens. Actuators A Phys. 2015, 224, 78–86. [Google Scholar] [CrossRef]
- Mohammad, T.; Mohammad, S. A novel high performance integrated two-axis inchworm piezoelectric motor. Smart Mater. Struct. 2020, 29, 015034. [Google Scholar] [CrossRef]
- Gao, Y.; Wen, J.; Ma, J.; Zhang, Y.; Wang, R.; Hu, Y.; Li, J. A self-adapting linear inchworm piezoelectric actuator based on a permanent magnets clamping structure. Mech. Syst. Signal Process. 2019, 132, 429–440. [Google Scholar] [CrossRef]
- Ma, L.; Jiang, C.; Xiao, J.; Wang, K. Design and analysis of a piezoelectric inchworm actuator. J. Micro-Bio Robot. 2014, 9, 11–21. [Google Scholar] [CrossRef]
- Neuman, J.; Nováček, Z.; Pavera, M.; Zlamal, J.; Kalousek, R.; Spousta, J.; Dittrichova, L.; Sikola, T. Experimental optimization of power-function-shaped drive pulse for stick-slip piezo actuators. Precis. Eng. 2015, 42, 187–194. [Google Scholar] [CrossRef]
- Guo, Z.; Tian, Y.; Zhang, D.; Wang, T.; Wu, M. A novel stick-slip based linear actuator using bi-directional motion of micro positioner. Mech. Syst. Signal Process. 2019, 128, 37–49. [Google Scholar] [CrossRef]
- Qin, F.; Huang, H.; Wang, J.; Tian, L.; Liang, T.; Zhao, H. Design and stepping characteristics of novel stick-slip piezo-driven linear actuator. Smart Mater. Struct. 2019, 28, 075026. [Google Scholar] [CrossRef]
- Zhang, Q.S.; Chen, X.B.; Yang, Q.; Zhang, W.J. Development and characterization of a novel piezoelectric driven stick–slip actuator with anisotropic-friction surfaces. Int. J. Adv. Manuf. Technol. 2012, 61, 1029–1034. [Google Scholar] [CrossRef]
- Wang, L.; Chen, D.; Cheng, T.H.; He, P.; Lu, X.H.; Zhao, H.W. A friction regulation hybrid driving method for backward motion restraint of the smooth impact drive mechanism. Smart Mater. Struct. 2016, 25, 085033. [Google Scholar] [CrossRef]
- Cheng, T.; Li, H.; He, M.; Zhao, H.; Lu, X.; Gao, H. Investigation on driving characteristics of a piezoelectric stick–slip actuator based on resonant/off-resonant hybrid excitation. Smart Mater. Struct. 2017, 26, 035042. [Google Scholar] [CrossRef]
- Jin, J.; Shi, Y.; Li, Y.; Zhao, C. Research on novel inertial linear ultrasonic piezoelectric motor. Opt. Precis. Eng. 2008, 16, 2371–2377. (In Chinese) [Google Scholar]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Lou, C.; Zhang, J. Investigation on a Linear Piezoelectric Actuator Based on Stick-Slip/Scan Excitation. Actuators 2021, 10, 39. https://doi.org/10.3390/act10020039
Shi Y, Lou C, Zhang J. Investigation on a Linear Piezoelectric Actuator Based on Stick-Slip/Scan Excitation. Actuators. 2021; 10(2):39. https://doi.org/10.3390/act10020039
Chicago/Turabian StyleShi, Yunlai, Chengshu Lou, and Jun Zhang. 2021. "Investigation on a Linear Piezoelectric Actuator Based on Stick-Slip/Scan Excitation" Actuators 10, no. 2: 39. https://doi.org/10.3390/act10020039
APA StyleShi, Y., Lou, C., & Zhang, J. (2021). Investigation on a Linear Piezoelectric Actuator Based on Stick-Slip/Scan Excitation. Actuators, 10(2), 39. https://doi.org/10.3390/act10020039