
An Improved Equivalent-Input-Disturbance Method for Uncertain Networked Control Systems with Packet Losses and Exogenous Disturbances




Abstract
:1. Introduction
- (1)
- The uncertainties, time delay, packet losses, and exogenous disturbance which simultaneously exist in NCS are compensated for effectively.
- (2)
- A full-order proportional–integral observer combined with the EID approach is applied to deal with uncertainties in an NCS. This structure of the proportional–integral observer has two degrees of freedom that ensure satisfactory disturbance-suppression.
- (3)
- The effect of two delays is equivalent to the input channel for stability analysis. The stability condition is presented for the design of the proportional–integral observer and feedback gains.
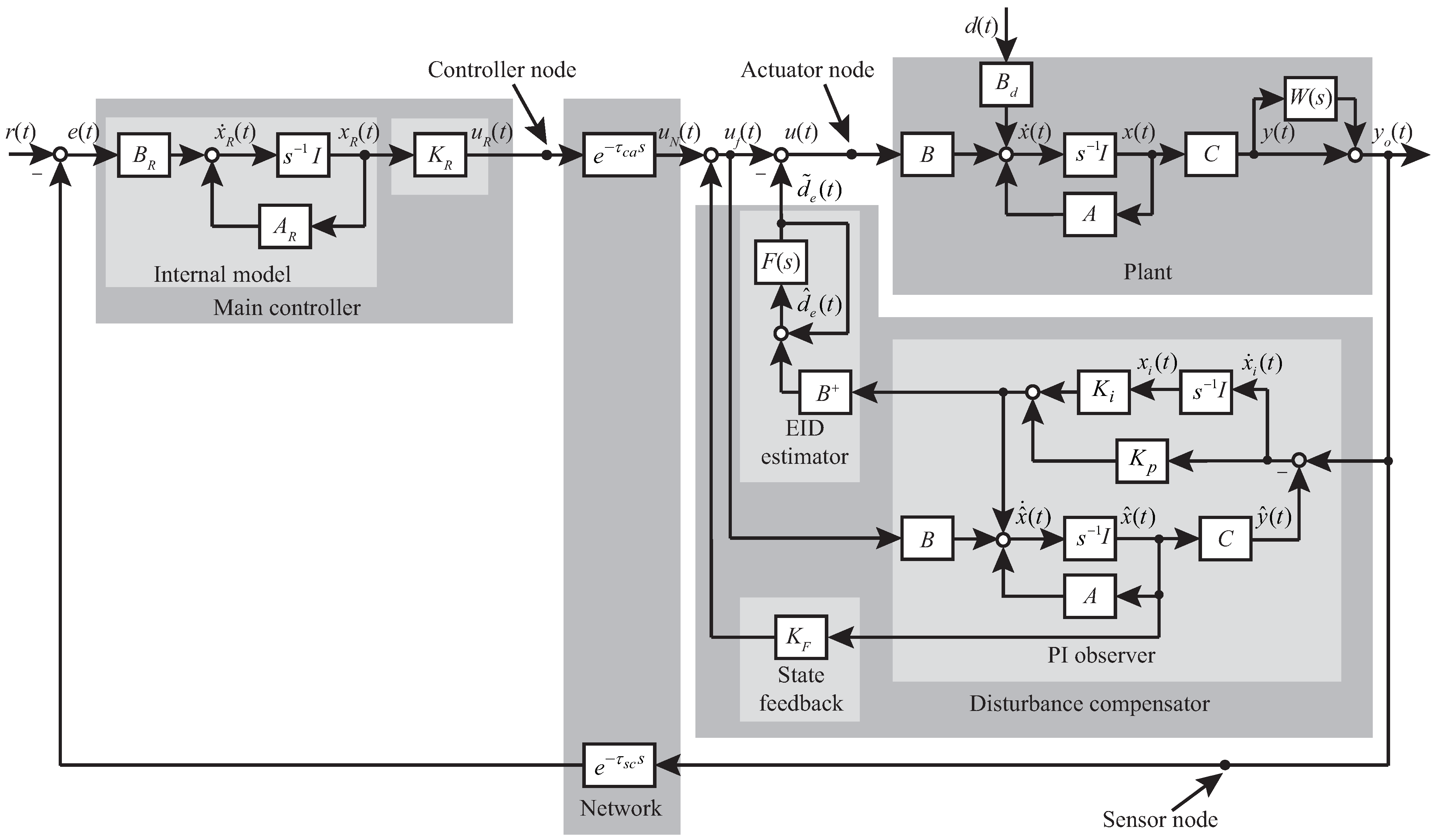
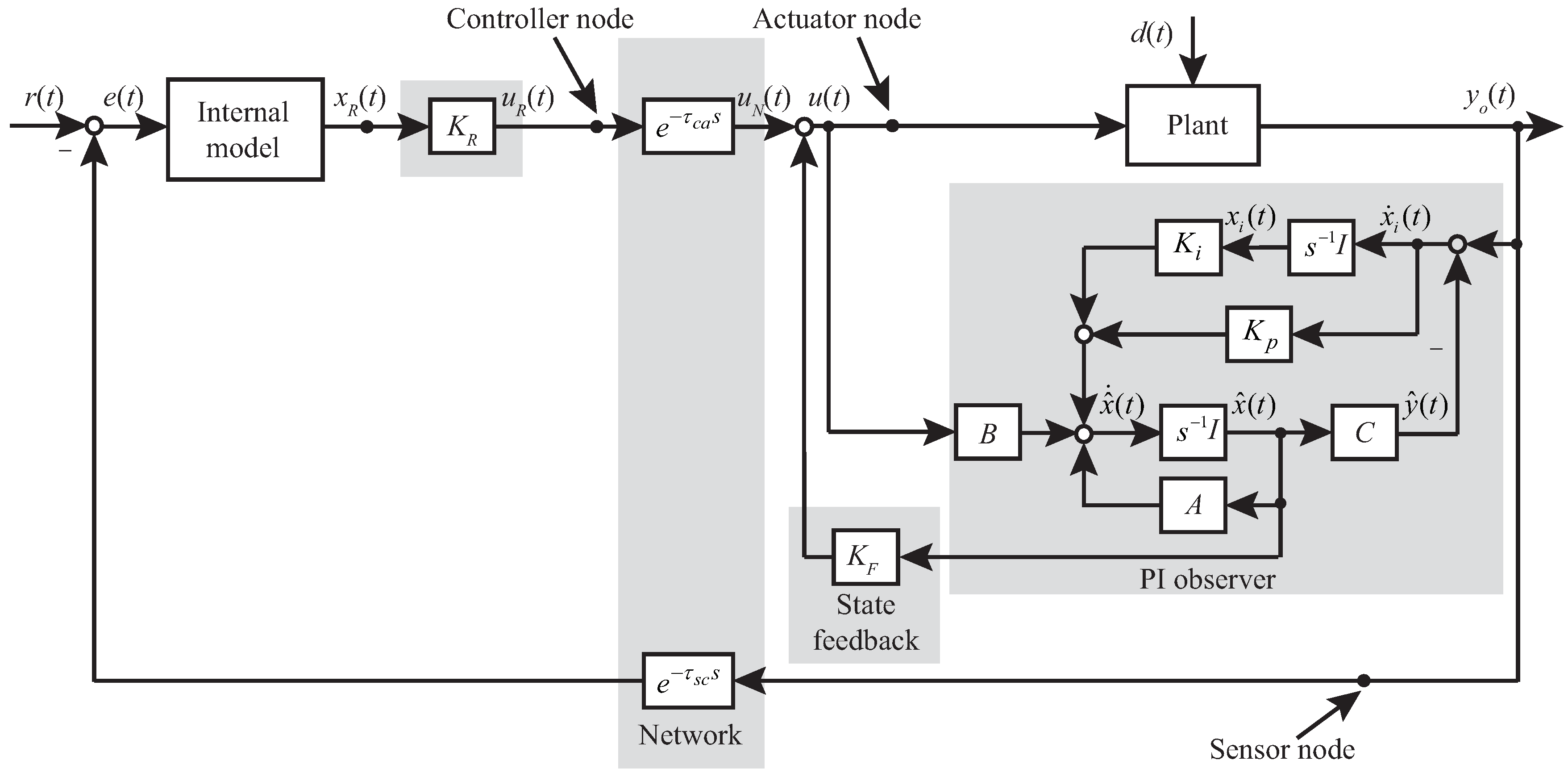
2. Configuration of IEID-Based NCS
3. Stability Analysis and System Design of IEID-Based NCS
- (1)
- ;
- (2)
- , ; and
- (3)
- , .
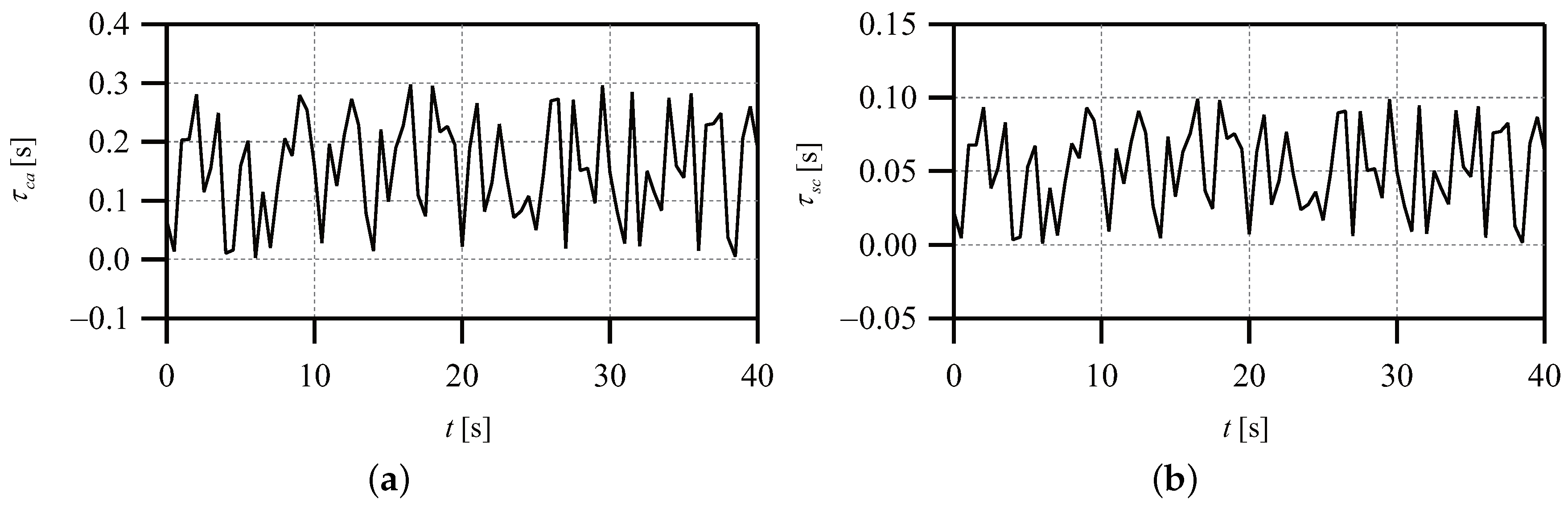
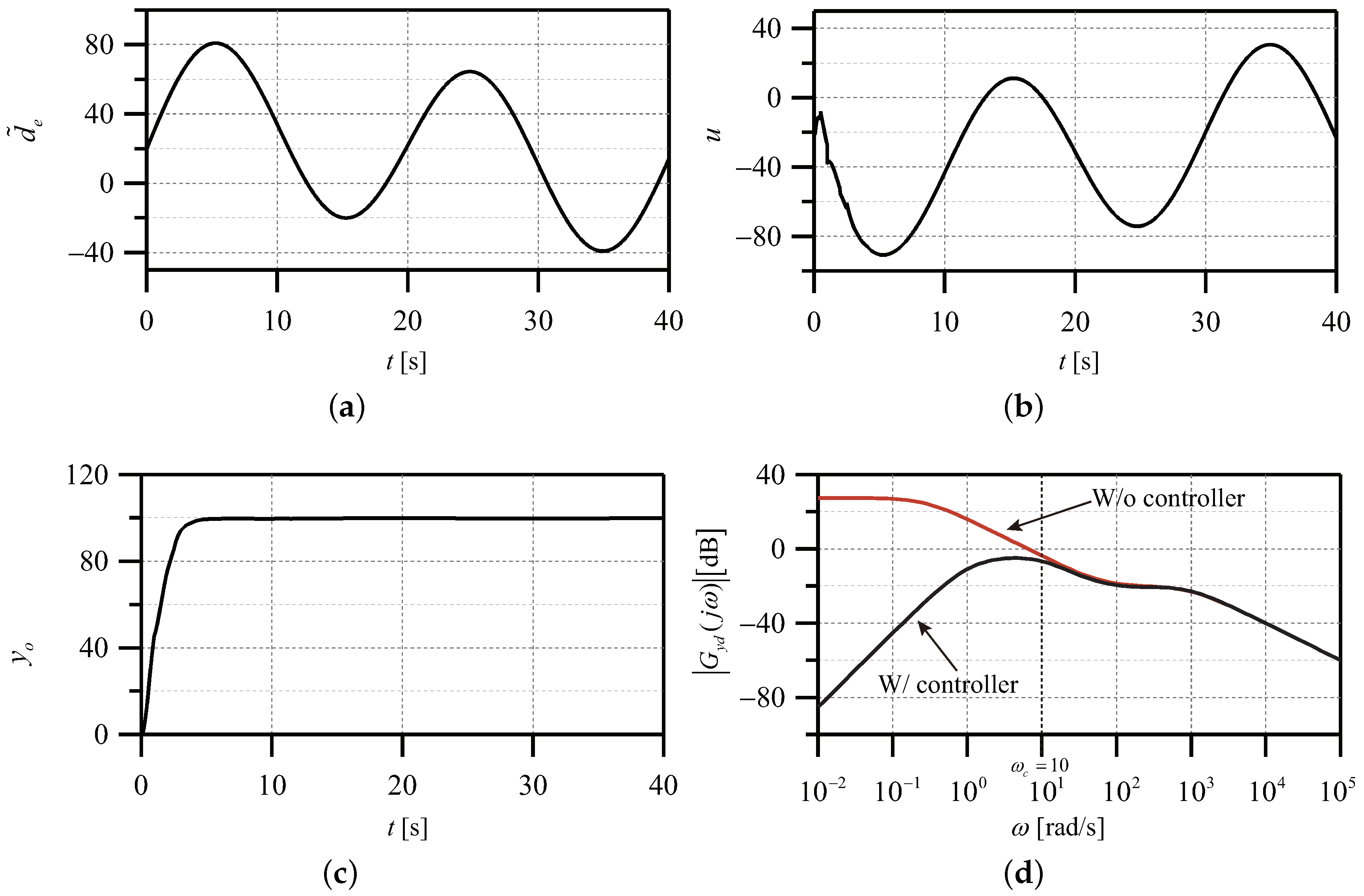
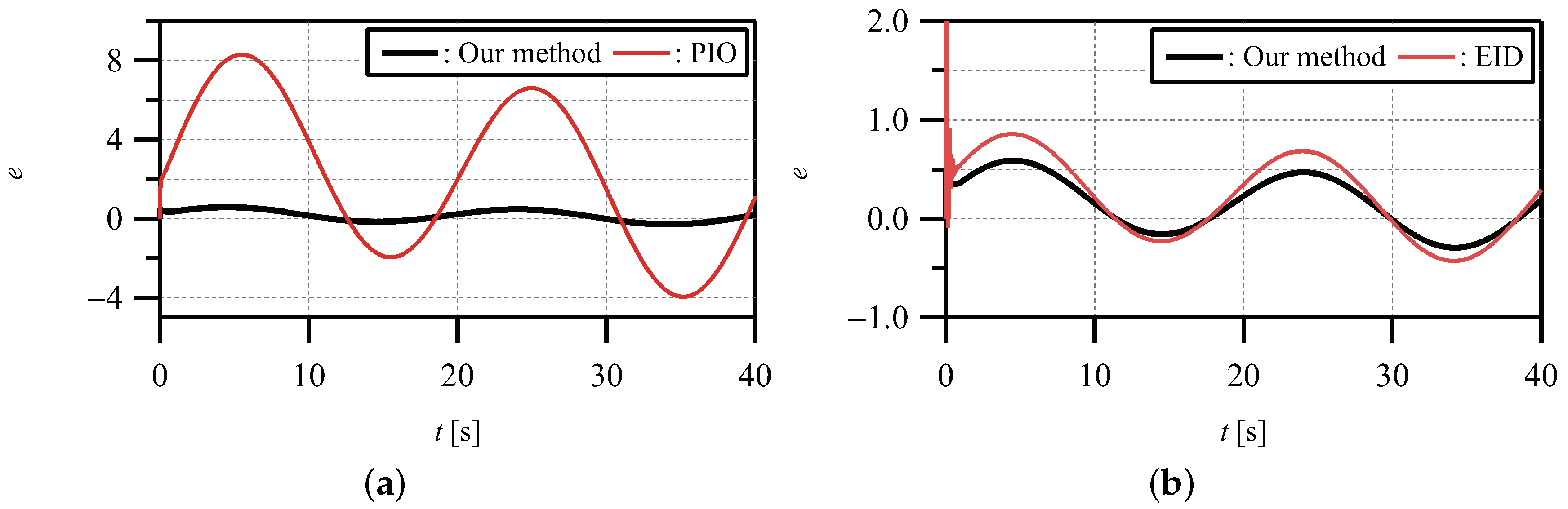
4. Case Study
4.1. Numerical Example
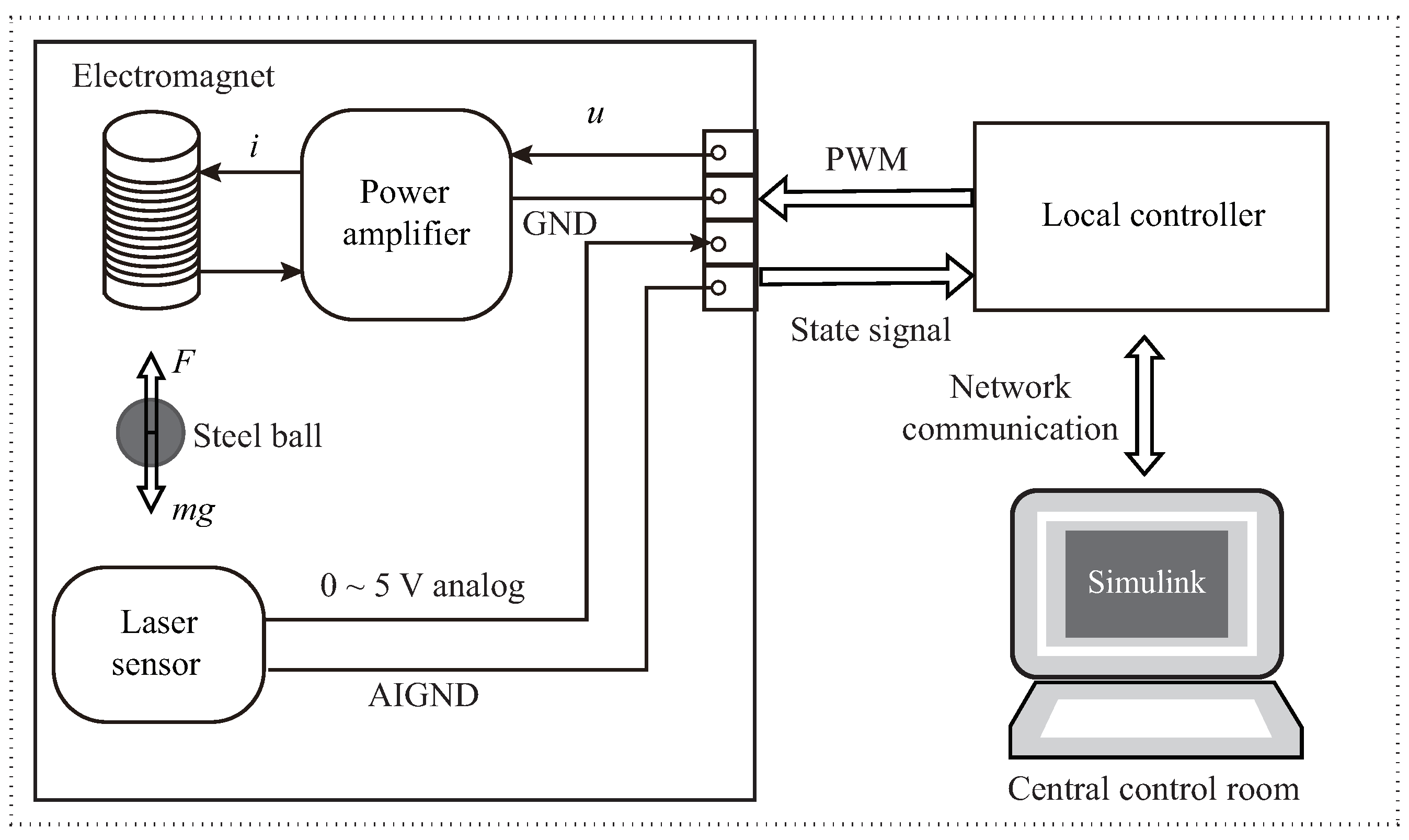
4.2. Example of a Magnetic Levitation Ball System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Han, Q.; Ge, X.; Ding, D.; Ding, L.; Yue, D.; Peng, C. Networked control systems: A survey of trends and techniques. IEEE/CAA J. Autom. Sin. 2020, 7, 1–17. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, H.; Kaynak, O. Network-Induced Constraints in Networked Control Systems—A Survey. IEEE Trans. Ind. Inf. 2013, 9, 403–416. [Google Scholar] [CrossRef]
- Shi, Y.; Yu, B. Robust mixed H2/H∞ control of networked control systems with random time delays in both forward and backward communication links. Automatica 2011, 47, 754–760. [Google Scholar] [CrossRef]
- Sun, J.; Yang, J.; Li, S.; Zheng, W. Sampled-Data-Based Event-Triggered Active Disturbance Rejection Control for Disturbed Systems in Networked Environment. IEEE Trans. Cybern. 2019, 49, 556–566. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Shi, P.; Wang, Q.; Yu, L. Analysis and synthesis of networked control systems: A survey of recent advances and challenges. ISA Trans. 2017, 66, 376–392. [Google Scholar] [CrossRef] [PubMed]
- Hu, Z.; Zhang, J.; Deng, F.; Fan, Z.; Qiu, L. A discretization approach to sampled-data stabilization of networked systems with successive packet losses. Int. J. Robust Nonlinear Control 2021, 31, 4589–4601. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, J.; Bai, Y. Stability Analysis of Event-Triggered Networked Control Systems with Time-Varying Delay and Packet Loss. J. Syst. Sci. Complex. 2020, 34, 265–280. [Google Scholar] [CrossRef]
- Jin, F.; Qin, X.; Chen, C.; Liu, Y. State Estimation of Networked Control Systems over Digital Communication Channels. Autom. Control. Comput. Sci. 2021, 55, 148–154. [Google Scholar] [CrossRef]
- Roy, A.K.; Srinivasan, K. State estimation for a networked control system with packet delay, packet dropouts, and uncertain observation in S-E and C-A channels. Optim. Control. Appl. Methods 2020, 41, 2094–2114. [Google Scholar] [CrossRef]
- Benítez-Pérez, H.; Ortega-Arjona, J.; Méndez-Monroy, P.; Rubio-Acosta, E.; Esquivel-Flores, O. Introduction to Networked Control Systems: Considering Time Delay Effects; Springer: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Liu, K.; Selivanov, A.; Fridman, E. Survey on time-delay approach to networked control. Annu. Rev. Control 2019, 48, 57–79. [Google Scholar] [CrossRef]
- Lai, C.L.; Hsu, P.L. Design the Remote Control System With the Time-Delay Estimator and the Adaptive Smith Predictor. IEEE Trans. Ind. Inf. 2010, 6, 73–80. [Google Scholar] [CrossRef]
- Sakr, A.; El-Nagar, A.M.; El-Bardini, M.; Sharaf, M. Improving the performance of networked control systems with time delay and data dropouts based on fuzzy model predictive control. J. Franklin Inst. 2018, 355, 7201–7225. [Google Scholar] [CrossRef]
- Cetinkaya, A.; Ishii, H.; Hayakawa, T. Networked Control Under Random and Malicious Packet Losses. IEEE Trans. Autom. Control 2017, 62, 2434–2449. [Google Scholar] [CrossRef] [Green Version]
- Baglietto, M.; Battistelli, G.; Tesi, P. Packet loss detection in networked control systems. Int. J. Robust Nonlinear Control 2020. [Google Scholar] [CrossRef]
- Hao, X.; Jagannathan, S.; Lewis, F.L. Stochastic optimal control of unknown linear networked control system in the presence of random delays and packet losses. Automatica 2012, 48, 1017–1030. [Google Scholar] [CrossRef]
- Tang, X.; Deng, L.; Liu, N.; Yang, S.; Yu, J. Observer-Based Output Feedback MPC for T–S Fuzzy System With Data Loss and Bounded Disturbance. IEEE Trans. Cybern. 2019, 49, 2119–2132. [Google Scholar] [CrossRef] [PubMed]
- Zhou, W.; Wang, Y.; Liang, Y. Sliding mode control for networked control systems: A brief survey. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, H.; Yu, X.; Liu, H.; Chen, D. Design of Sliding-Mode-Based Control for Nonlinear Systems With Mixed-Delays and Packet Losses Under Uncertain Missing Probability. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3217–3228. [Google Scholar] [CrossRef]
- Choe, B.; Furukawa, Y. Automatic Track Keeping to Realize the Realistic Operation of a Ship. Int. J. Fuzzy Logic Intell. Syst. 2019, 19, 172–182. [Google Scholar] [CrossRef]
- Liu, Y.; Han, C. Optimal Output Tracking Control and Stabilization of Networked Control Systems with Packet Losses. J. Syst. Sci. Complex. 2020, 34, 602–617. [Google Scholar] [CrossRef]
- Elahi, A.; Alfi, A.; Modares, H. H∞ Consensus of Homogeneous Vehicular Platooning Systems With Packet Dropout and Communication Delay. IEEE Trans. Syst. Man Cybern. Syst. 2021, 99, 1–12. [Google Scholar] [CrossRef]
- Sun, J.; Jiang, J. Stability of Uncertain Networked Control Systems. Procedia Eng. 2011, 24, 551–557. [Google Scholar] [CrossRef] [Green Version]
- Sharma, A.K.; Ray, G. Robust controller with state-parameter estimation for uncertain networked control system. IET Control Theory Appl. 2012, 6, 2775–2784. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, B. Robust H∞ output tracking control of uncertain networked control systems. High Technol. Lett. 2019, 25, 88–97. [Google Scholar]
- Jiang, X.; Chi, M.; Chen, X.; Yan, H.; Huang, T. Output Tracking Control Performance of Discrete Networked Systems Over Erasure Channel With Model Uncertainty. IEEE Trans. Cybern. 2021, 1–9. [Google Scholar] [CrossRef]
- Zhang, Y.; Ren, L.; Xie, S.; Zhang, L.; Zhou, B. Robust sliding mode control for uncertain networked control system with two-channel packet dropouts. J. Cent. South Univ. 2019, 26, 881–892. [Google Scholar] [CrossRef]
- Muthukumar, P.; Arunagirinathan, S.; Lakshmanan, S. Nonfragile Sampled-Data Control for Uncertain Networked Control Systems With Additive Time-Varying Delays. IEEE Trans. Cybern. 2019, 49, 1512–1523. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Ruan, X. Iterative learning control for uncertain nonlinear networked control systems with random packet dropout. Int. J. Robust Nonlinear Control 2019, 29, 3529–3546. [Google Scholar] [CrossRef]
- Mendoza-Mondragon, F.; Hernandez-Guzman, V.M.; Rodriguez-Resendiz, J. Robust Speed Control of Permanent Magnet Synchronous Motors Using Two-Degrees-of-Freedom Control. IEEE Trans. Ind. Electron. 2018, 65, 6099–6108. [Google Scholar] [CrossRef]
- Thenozhi, S.; Concha, A.; Resendiz, J.R. A Contraction Theory-based Tracking Control Design With Friction Identification and Compensation. IEEE Trans. Ind. Electron. 2021, 1. [Google Scholar] [CrossRef]
- Li, M.; Chen, Y. Robust Tracking Control of Networked Control Systems With Communication Constraints and External Disturbance. IEEE Trans. Ind. Electron. 2017, 64, 4037–4047. [Google Scholar] [CrossRef]
- Man, D.; Li, Z.; Zhao, R. Output tracking with disturbance attenuation for cascade control systems subject to network constraint. Asian J. Control 2020, 22. [Google Scholar] [CrossRef]
- Zhang, H.; Dong, Y.; Yin, X.; Ji, C. Adaptive model-based event-triggered control of networked control system with external disturbance. IET Control Theory Appl. 2016, 10, 1956–1962. [Google Scholar] [CrossRef]
- Zhao, Y.; Pan, X.; Yu, S. Predictive Event-Triggered Control for Disturbanced Wireless Networked Control Systems. J. Syst. Sci. Complex. 2020, 34. [Google Scholar] [CrossRef]
- Razavinasab, Z.; Farsangi, M.M.; Barkhordari, M. Robust output feedback distributed model predictive control of networked systems with communication delays in the presence of disturbance. ISA Trans. 2018, 80, 12–21. [Google Scholar] [CrossRef]
- Yuan, Y.; Yuan, H.; Wang, Z.; Lei, G.; Yang, H. Optimal control for networked control systems with disturbances: A delta operator approach. IET Control Theory Appl. 2017, 11, 1325–1332. [Google Scholar] [CrossRef]
- Shi, Z.; Zhang, P.; Lin, J.; Ding, H. Permanent magnet synchronous motor speed control based on improved active disturbance rejection control. Actuators 2021, 10, 147. [Google Scholar] [CrossRef]
- She, J.; Fang, M.; Ohyama, Y.; Hashimoto, H.; Wu, M. Improving Disturbance-Rejection Performance Based on an Equivalent-Input-Disturbance Approach. IEEE Trans. Ind. Electron. 2008, 55, 380–389. [Google Scholar] [CrossRef]
- Liu, R.; Liu, G.; Wu, M.; Nie, Z. Disturbance rejection for time-delay systems based on the equivalent-input-disturbance approach. J. Franklin Inst. 2014, 351, 3364–3377. [Google Scholar] [CrossRef]
- Gao, F.; Wu, M.; She, J.; He, Y. Delay-dependent guaranteed-cost control based on combination of Smith predictor and equivalent-input-disturbance approach. ISA Trans. 2016, 62, 215–221. [Google Scholar] [CrossRef]
- Sakthivel, R.; Mohanapriya, S.; Selvaraj, P.; Karimi, H.R.; Marshal Anthoni, S. EID estimator-based modified repetitive control for singular systems with time-varying delay. Nonlinear Dynam. 2017, 89, 1141–1156. [Google Scholar] [CrossRef]
- Li, M.; She, J.; Zhang, C.K.; Liu, Z.T.; Wu, M.; Ohyama, Y. Active disturbance rejection for time-varying state-delay systems based on equivalent-input-disturbance approach. ISA Trans. 2021, 108, 69–77. [Google Scholar] [CrossRef]
- Ho, D.; Lu, G. Robust stabilization for a class of discrete-time non-linear systems via output feedback: The unified LMI approach. Int. J. Control 2003, 76, 105–115. [Google Scholar] [CrossRef]
- Khargonekar, P.; Petersen, I.; Zhou, K. Robust stabilization of uncertain linear systems: Quadratic stabilizability and H∞ control theory. IEEE Trans. Autom. Control 1990, 35, 356–361. [Google Scholar] [CrossRef]
- Pesch, A.; Sawicki, J. Active magnetic bearing online levitation recovery through m-Synthesis robust control. Actuators 2017, 6, 2. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Chen, L.; Xu, Q. Disturbance Estimation-Based Robust Model Predictive Position Tracking Control for Magnetic Levitation System. IEEE/ASME Trans. Mechatron. 2021, 1. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value |
|---|---|---|
| m | Mass of steel ball | 0.17 |
| d | diam of steel ball | 0.06 |
| R | Coil resistance | 13.577 |
| Vacuum permeability | ||
| Cross-sectional area of electromagnet magnetic conductivity | ||
| N | Coil turns | 1057 |
| Viscous damping coefficient | 341 | |
| Balance position | 0.0425 | |
| Balance current | 0.633 | |
| g | Acceleration of gravity | 9.807 |
| Spring rate | – | |
| i | Instantaneous current through the solenoid | – |
| Control voltage applied to the solenoid | – | |
| Electromagnetic force | – | |
| h | Gap between the electromagnet surface and steel ball | – |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; She, J.; Liu, Z.-T.; Wu, M.; Ohyama, Y. An Improved Equivalent-Input-Disturbance Method for Uncertain Networked Control Systems with Packet Losses and Exogenous Disturbances. Actuators 2021, 10, 263. https://doi.org/10.3390/act10100263
Li M, She J, Liu Z-T, Wu M, Ohyama Y. An Improved Equivalent-Input-Disturbance Method for Uncertain Networked Control Systems with Packet Losses and Exogenous Disturbances. Actuators. 2021; 10(10):263. https://doi.org/10.3390/act10100263
Chicago/Turabian StyleLi, Meiliu, Jinhua She, Zhen-Tao Liu, Min Wu, and Yasuhiro Ohyama. 2021. "An Improved Equivalent-Input-Disturbance Method for Uncertain Networked Control Systems with Packet Losses and Exogenous Disturbances" Actuators 10, no. 10: 263. https://doi.org/10.3390/act10100263
APA StyleLi, M., She, J., Liu, Z.-T., Wu, M., & Ohyama, Y. (2021). An Improved Equivalent-Input-Disturbance Method for Uncertain Networked Control Systems with Packet Losses and Exogenous Disturbances. Actuators, 10(10), 263. https://doi.org/10.3390/act10100263