Development of a Novel Miniaturized Electromagnetic Actuator for a Modular Serial Manipulator


Abstract
1. Introduction
2. Dual-Axis Electromagnetic Actuator
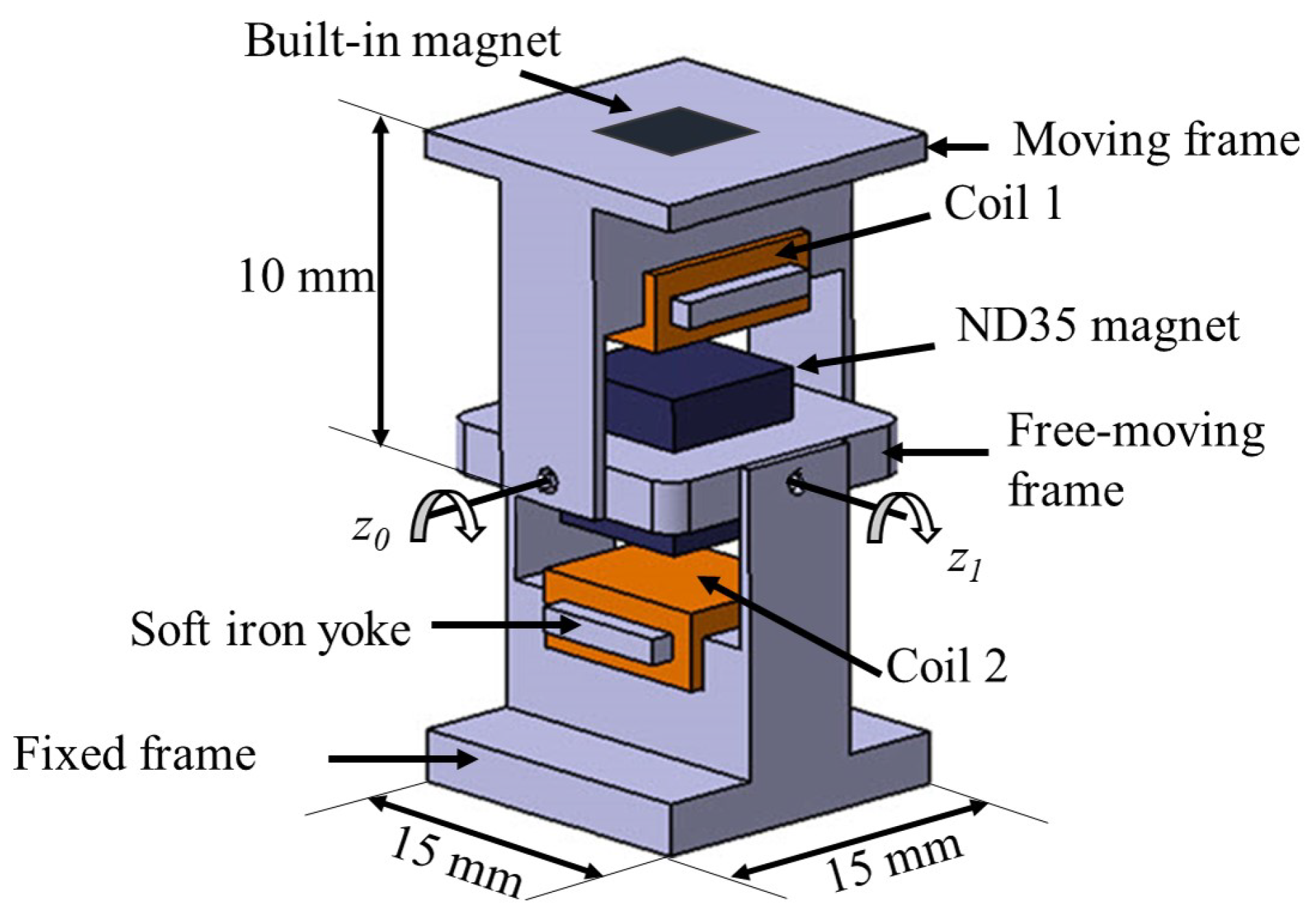
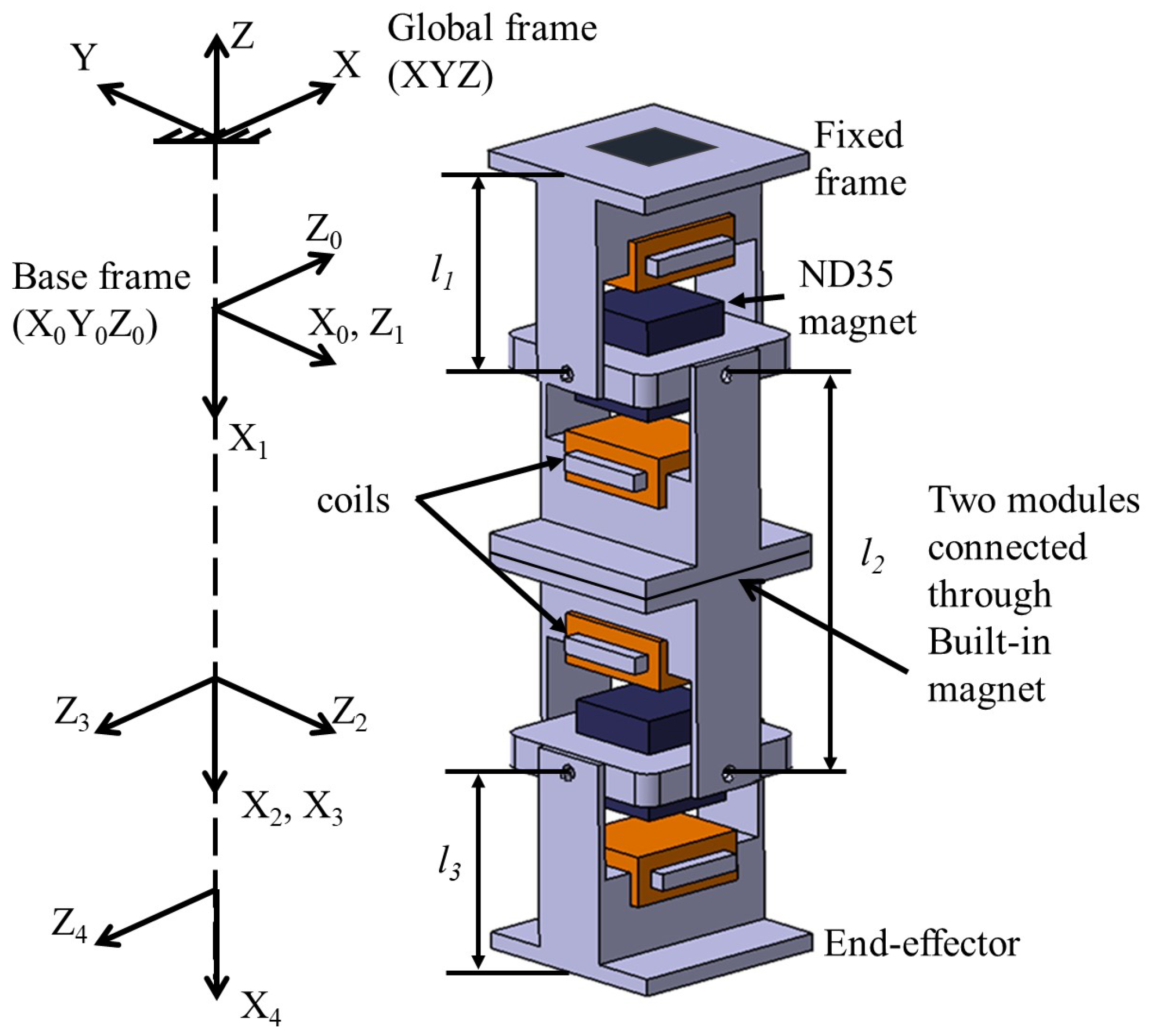
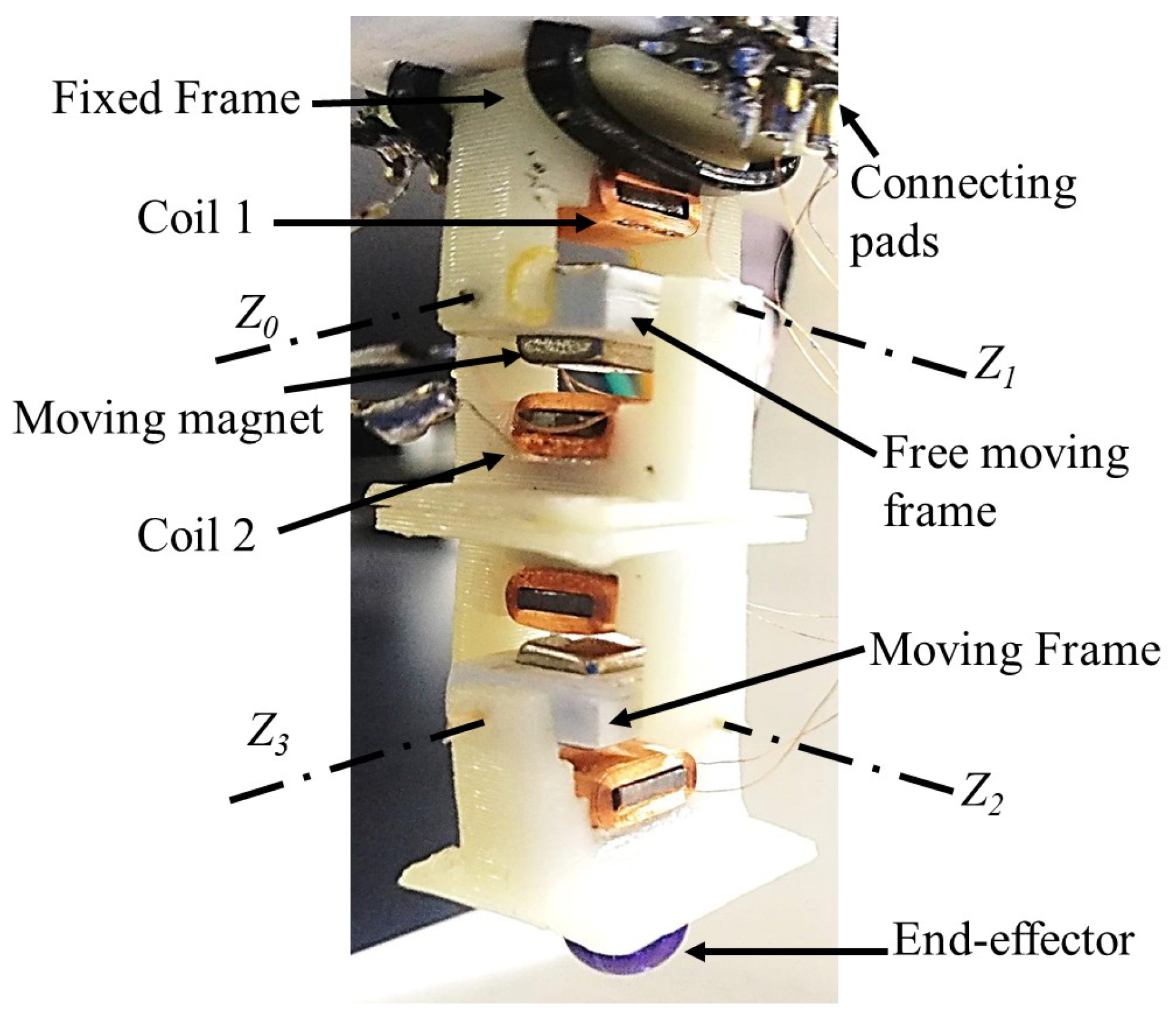
2.1. Actuator Design
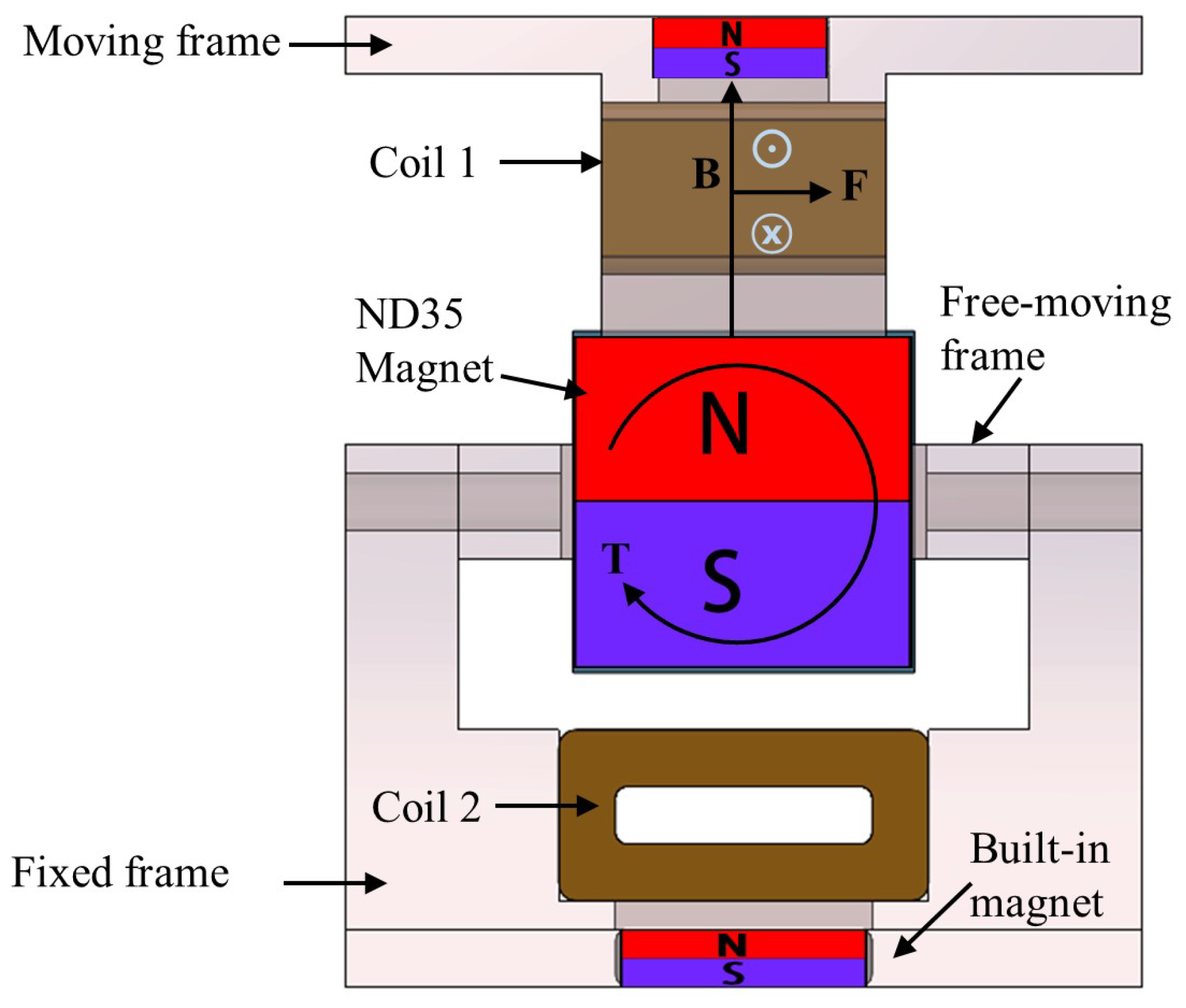
2.2. Working Principle of the Electromagnetic Actuator
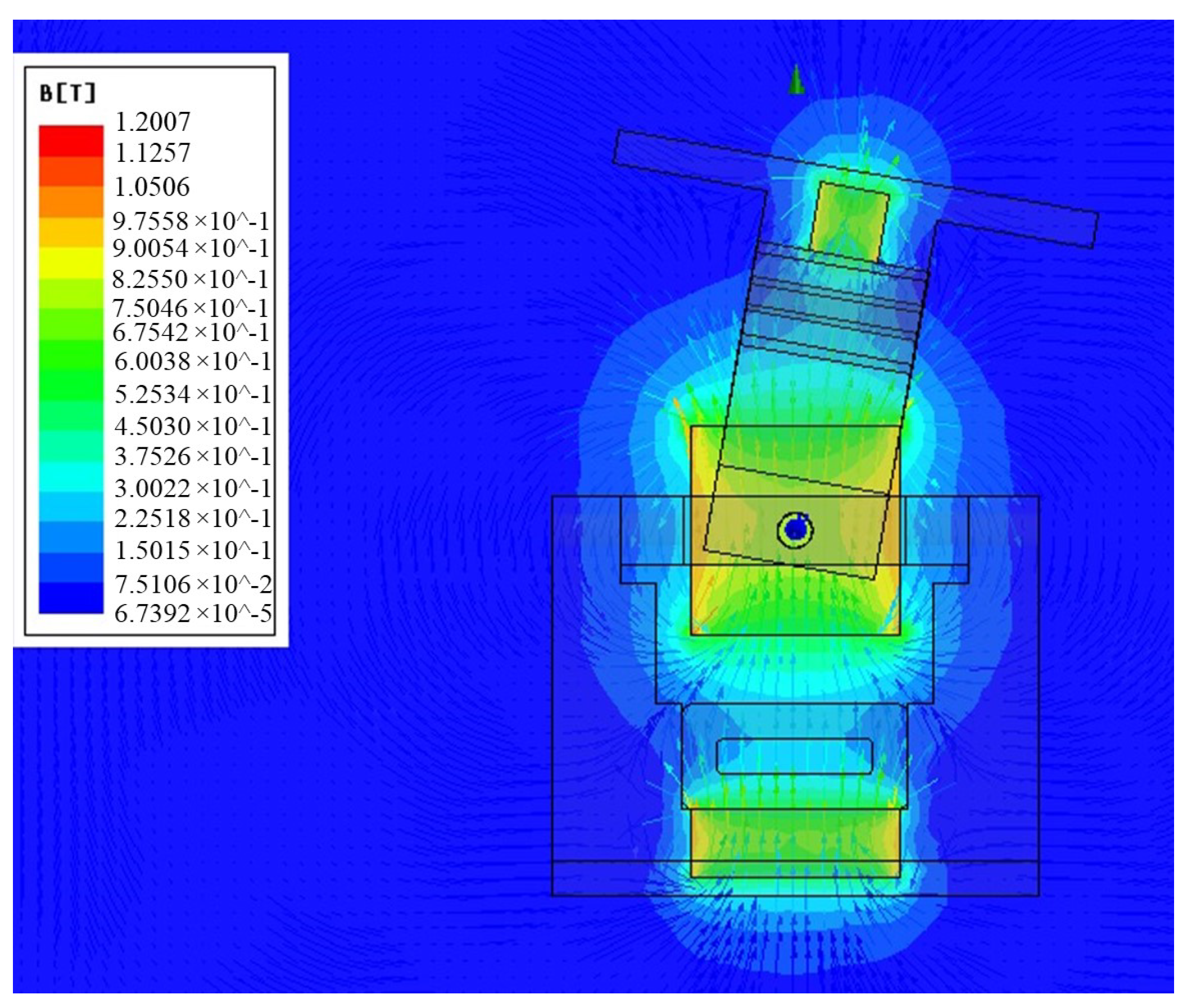
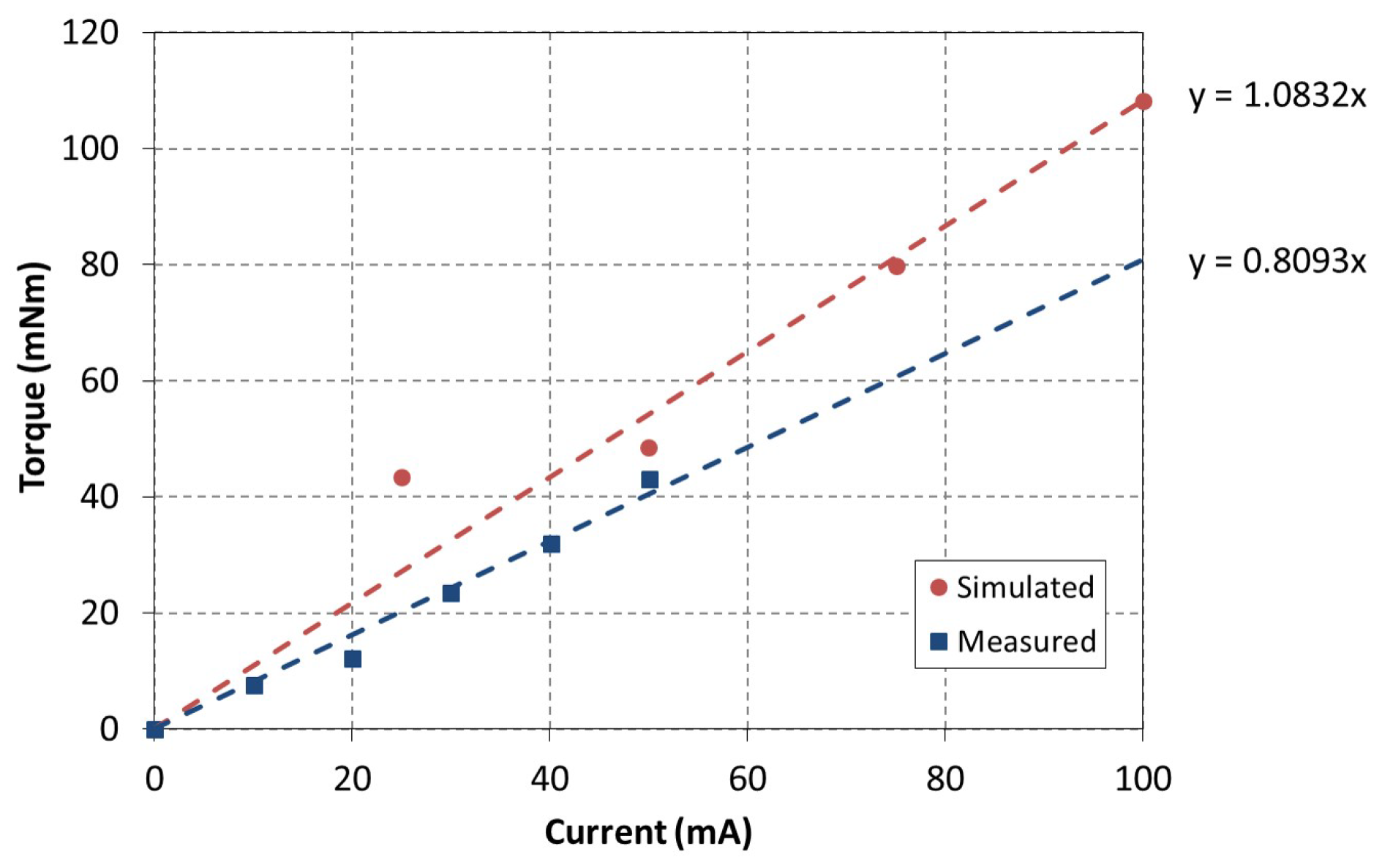
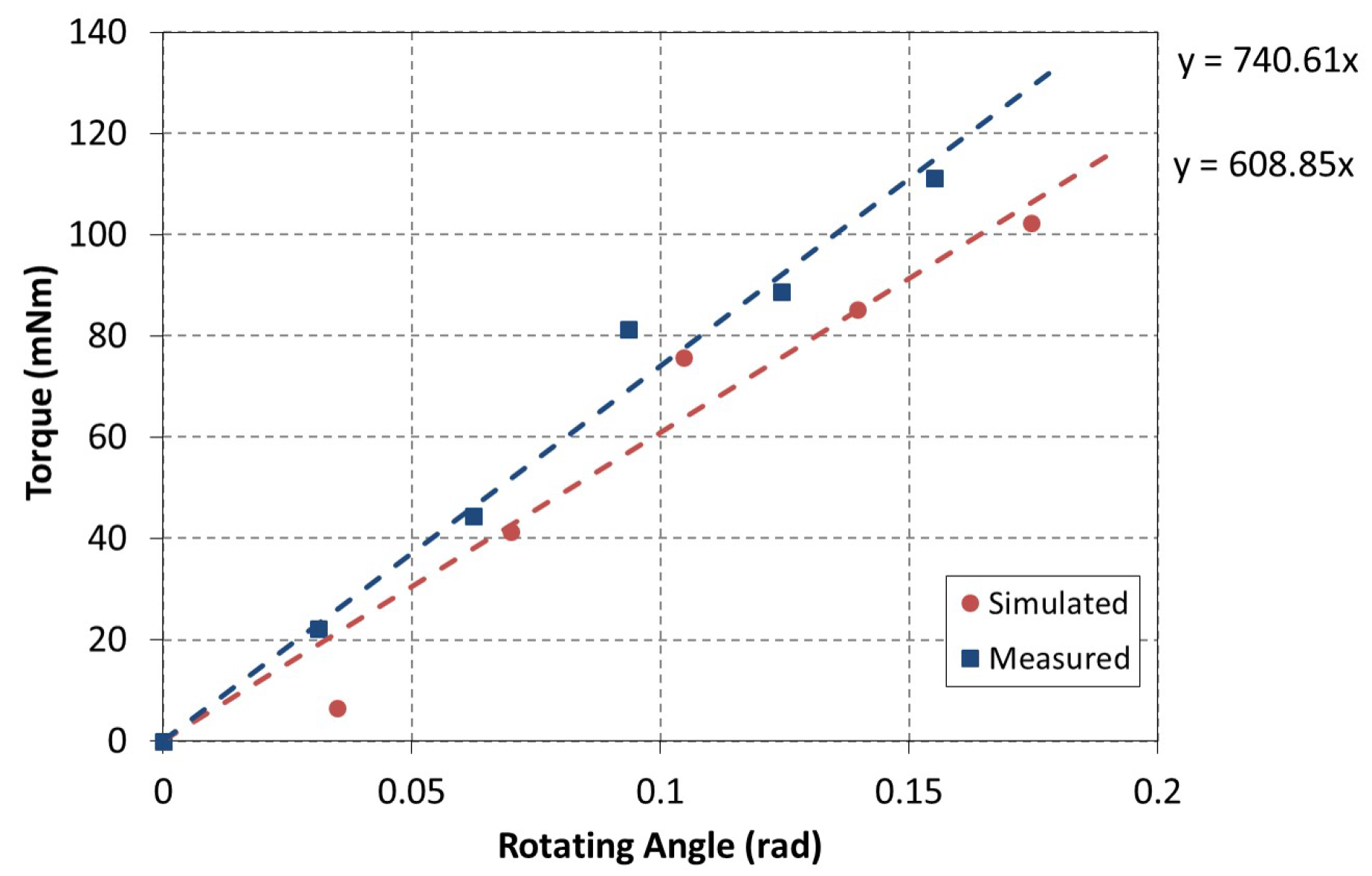
2.3. Characterization Analyses of Our Electromagnetic Actuator
3. Manipulator Design and Kinematic Analyses
3.1. Manipulator Design
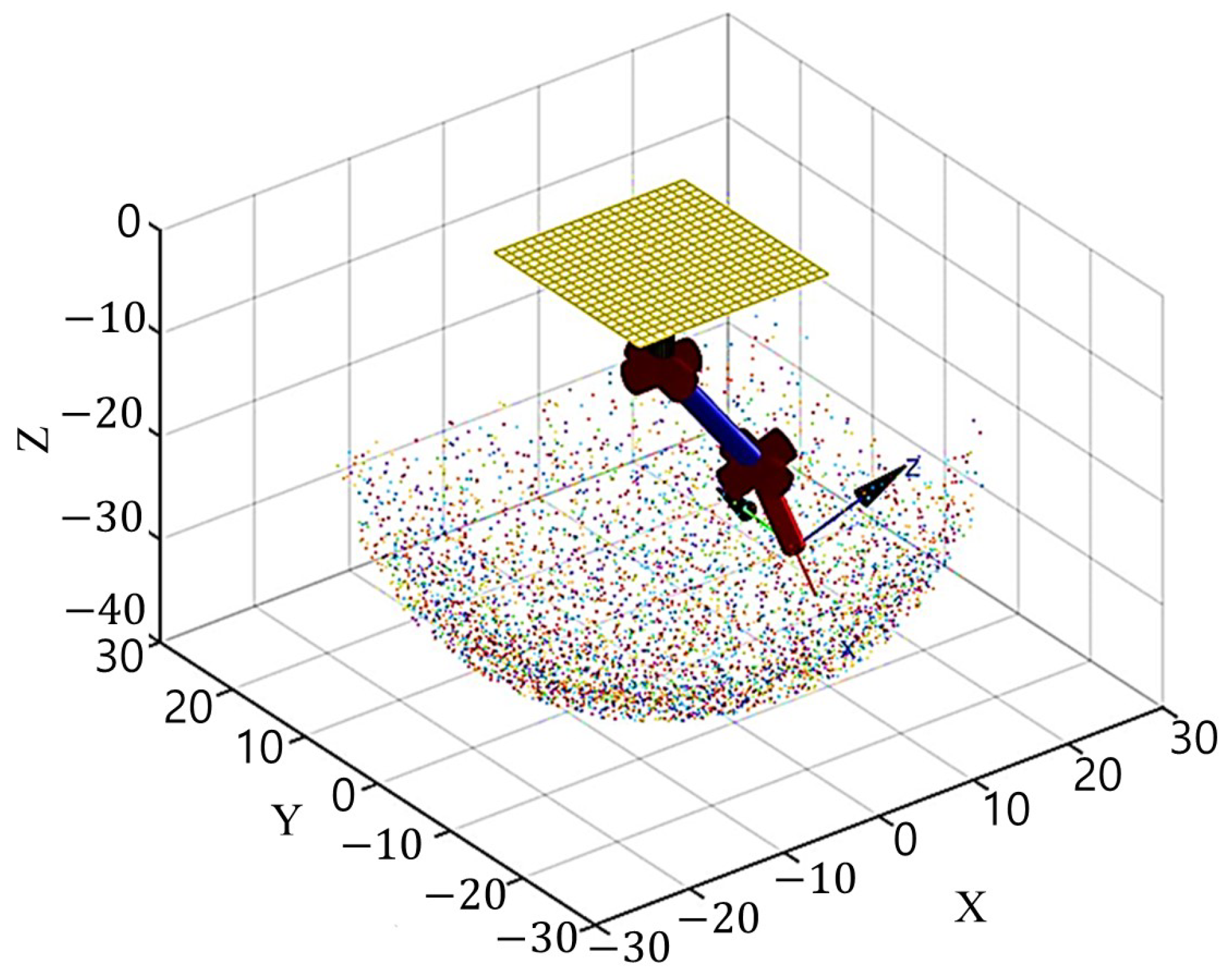
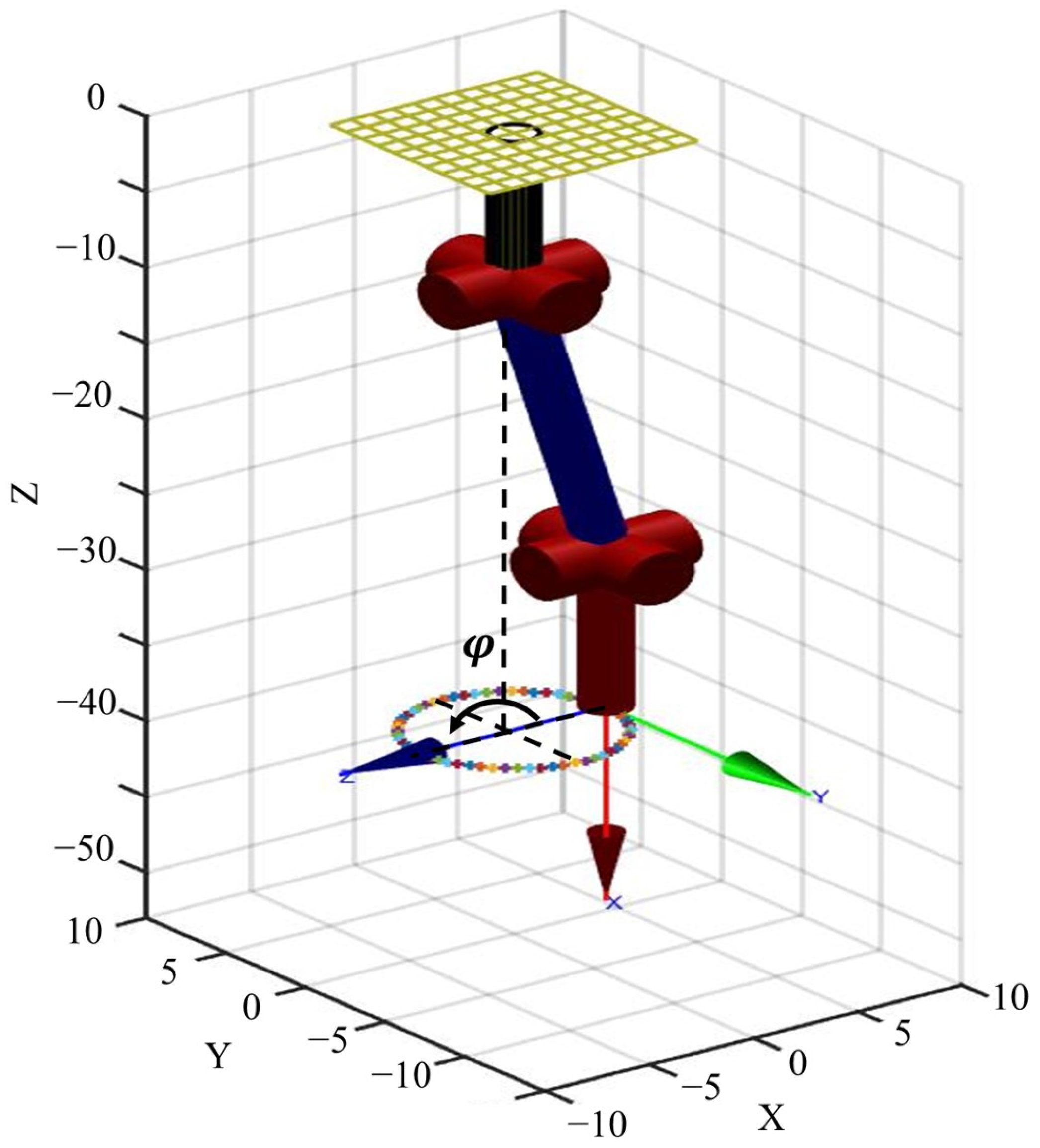
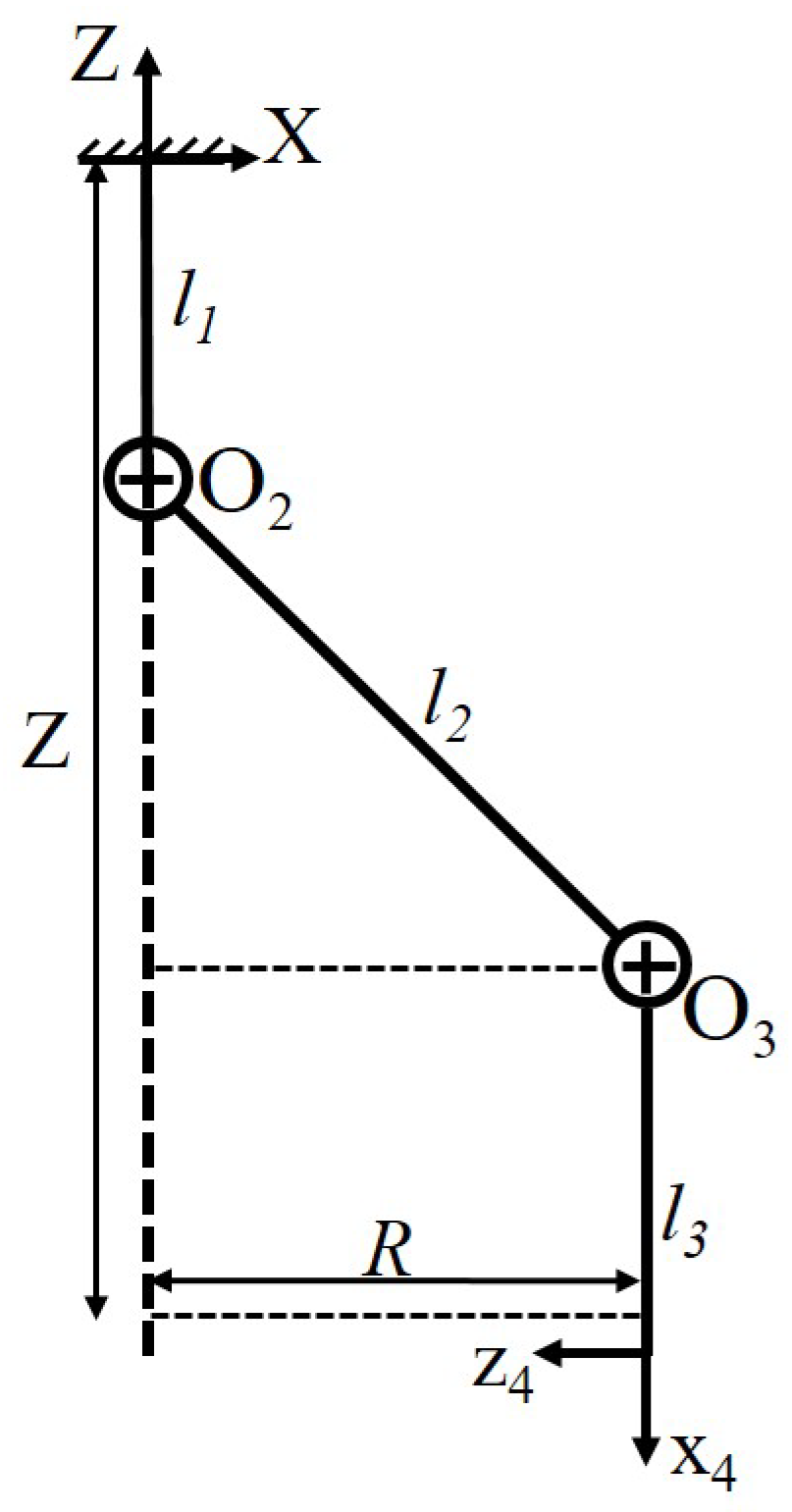
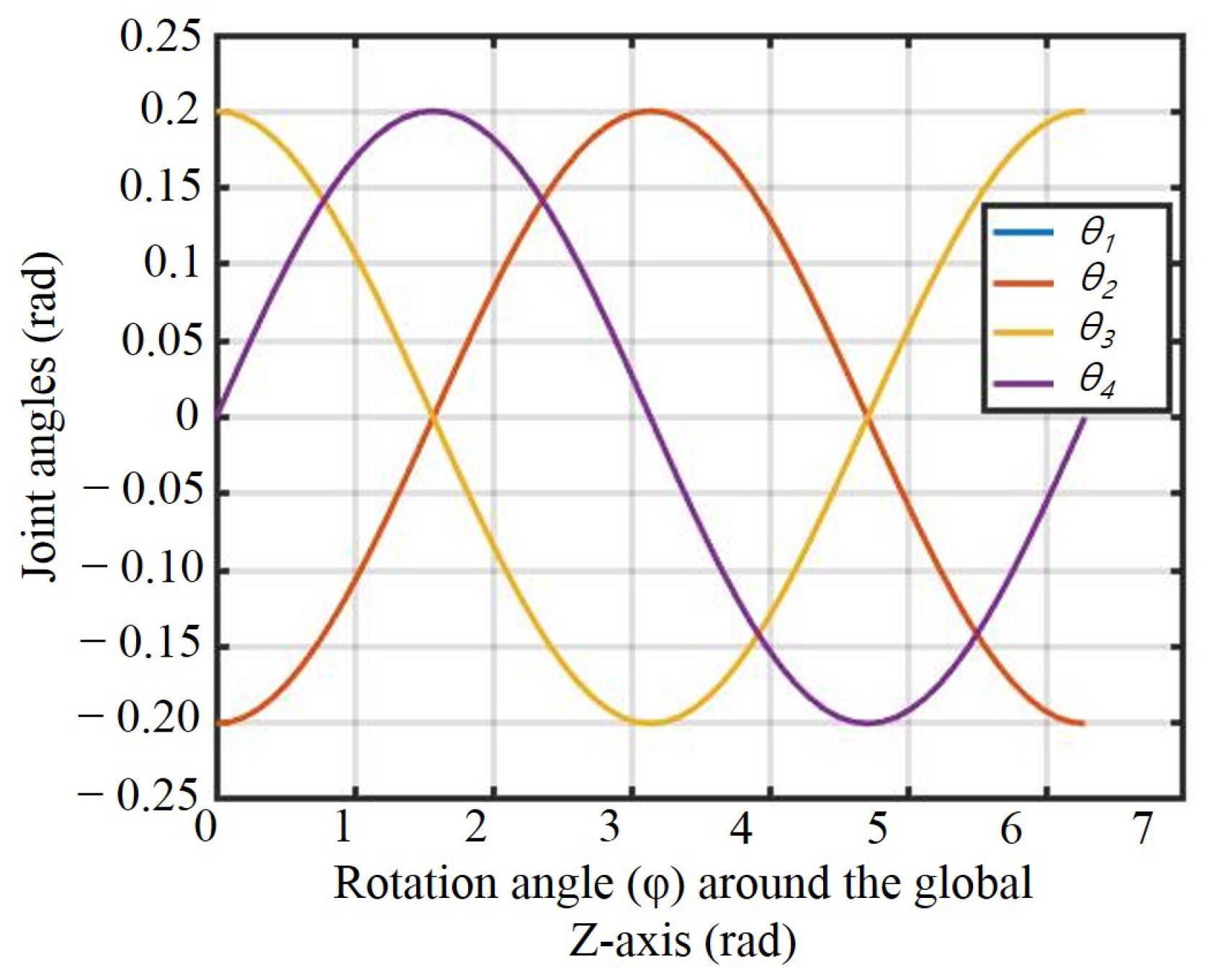
3.2. Forward Kinematics
3.3. Inverse Kinematics
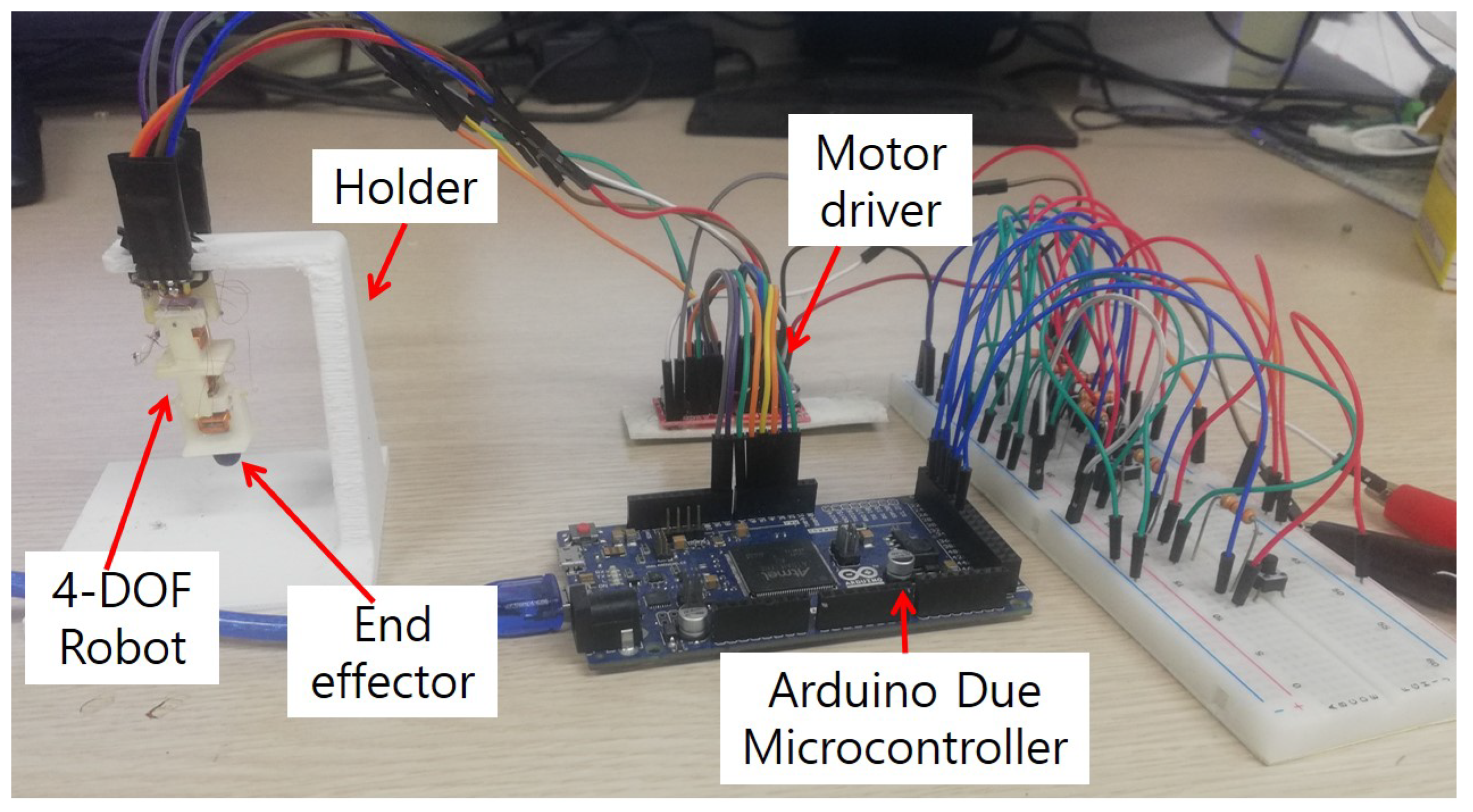
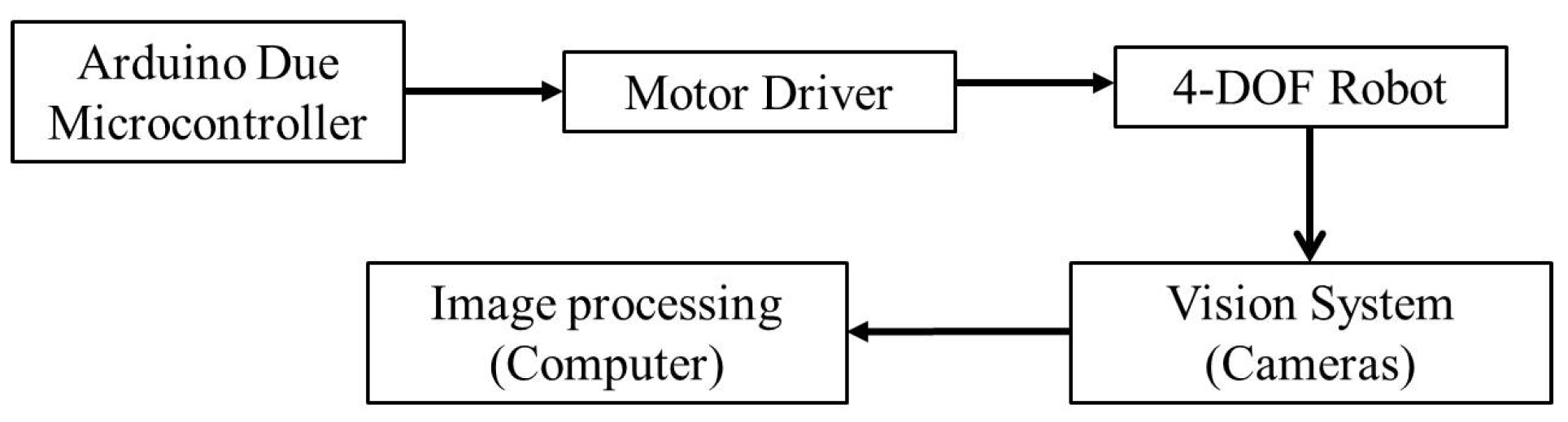
4. Experimental Setup and Open-Loop Control System
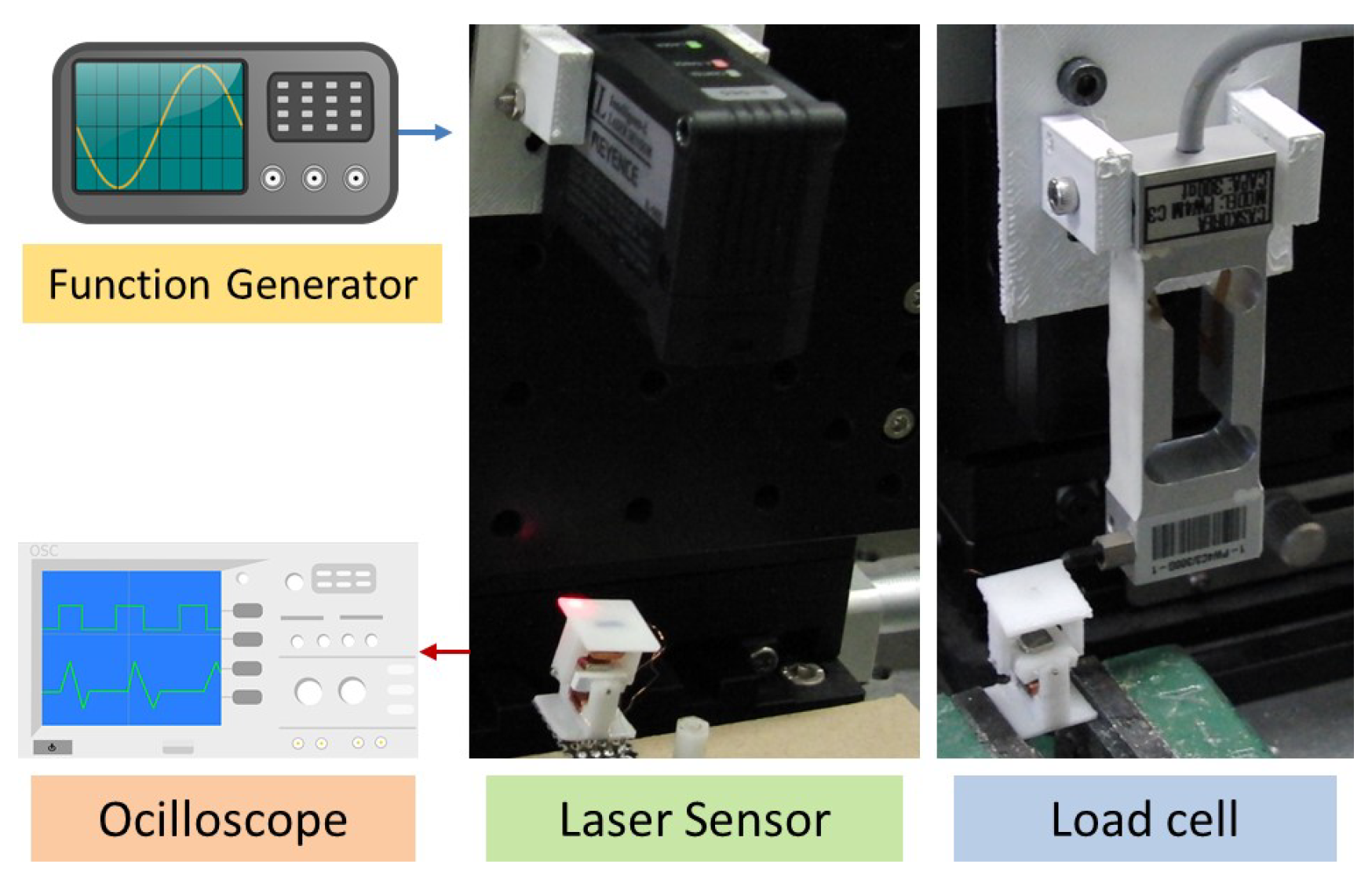
4.1. System Setup
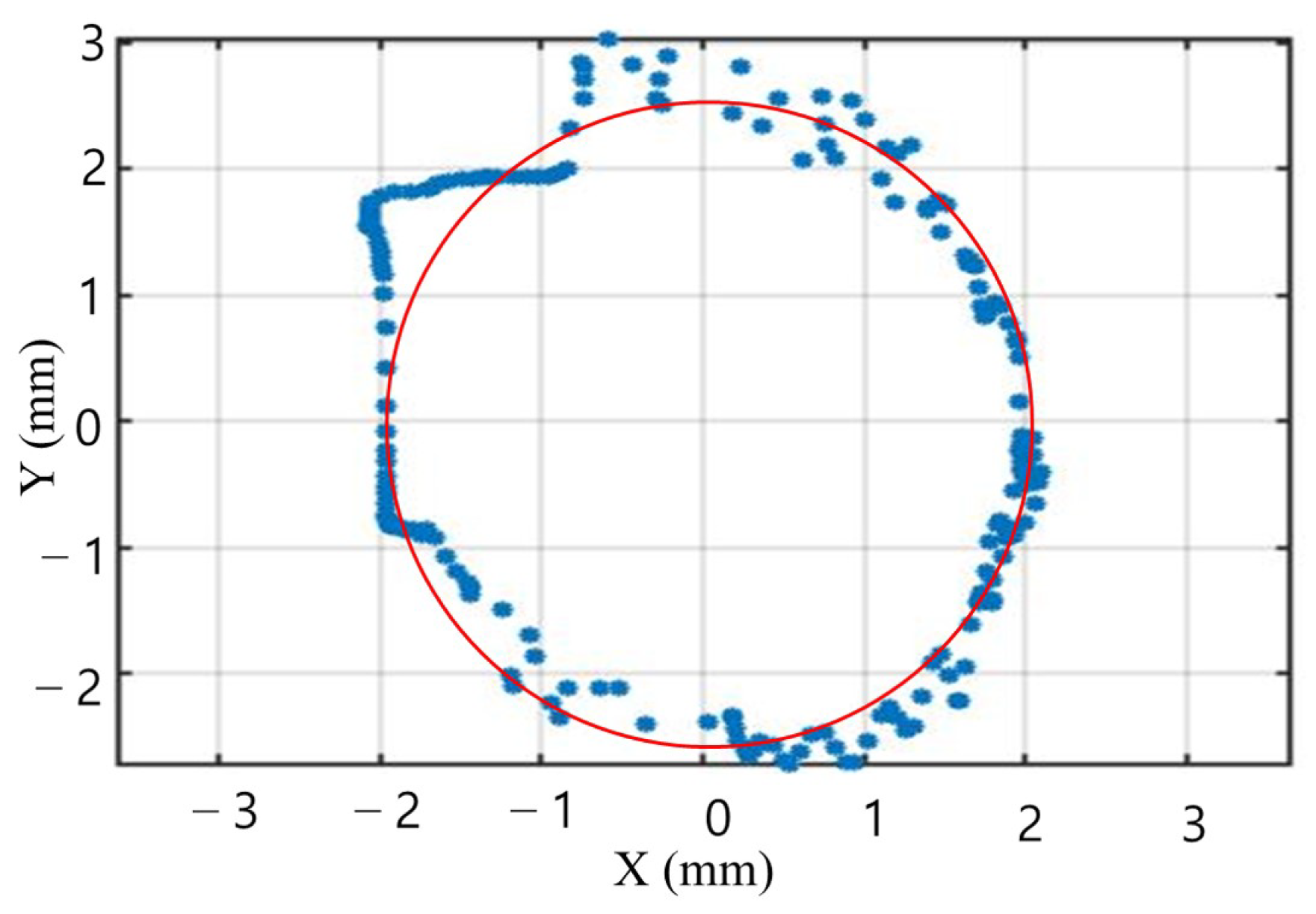
4.2. Open-Loop Tracking Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fu, Q.; Guo, S.; Huang, Q.; Hirata, H.; Ishihara, H. Development and Evaluation of Novel Magnetic Actuated Microrobot with Spiral Motion Using Electromagnetic Actuation System. J. Med. Biol. Eng. 2016, 36, 506–514. [Google Scholar] [CrossRef]
- Choi, H.; Choi, J.; Jeong, S.; Yu, C.; Park, J.; Park, S. Two-dimensional locomotion of a microrobot with a novel stationary electromagnetic actuation system. Smart Mater. Struct. 2009, 18, 115017–115023. [Google Scholar] [CrossRef]
- Yu, C.; Kim, J.; Choi, H.; Choi, J.; Jeong, S.; Cha, K.; Park, J.; Park, S. Novel Electromagnetic Actuation System for Three-Dimensional Locomotion and Drilling of Intravascular Microrobot. Sens. Actuators A-Phys. 2010, 161, 297–304. [Google Scholar] [CrossRef]
- Choi, H.; Jeong, S.; Go, G.; Lee, C.; Zhen, J.; Ko, S.Y.; Park, J.; Park, S. Equitranslational and axially rotational microrobot using electromagnetic actuation system. Int. J. Control Autom. Syst. 2017, 15, 1342–1350. [Google Scholar] [CrossRef]
- Li, D.; Niu, F.; Li, J.; Li, X.; Sun, D. Gradient-Enhanced Electromagnetic Actuation System with a New Core Shape Design for Microrobot Manipulation. IEEE Trans. Ind. Electron. 2020, 67, 4700–4710. [Google Scholar] [CrossRef]
- Tehrani, M.D.; Kim, M.O.; Yoon, J. A Novel Electromagnetic Actuation System for Magnetic Nanoparticle Guidance in Blood Vessels. IEEE Trans. Magn. 2014, 50, 1–12. [Google Scholar] [CrossRef]
- Niu, F.; Li, J.; Ma, W.; Yang, J.; Sun, D. Development of an Enhanced Electromagnetic Actuation System with Enlarged Workspace. IEEE/ASME Trans. Mechatron. 2017, 22, 2265–2276. [Google Scholar] [CrossRef]
- Manamanchaiyaporn, L.; Xu, T.; Wu, X. An Optimal Design of an Electromagnetic Actuation System towards a Large Homogeneous Magnetic Field and Accessible Workspace for Magnetic Manipulation. Energies 2020, 13, 911. [Google Scholar] [CrossRef]
- Lu, H.; Zhu, J.; Lin, Z.; Guo, Y. An inchworm mobile robot using electromagnetic linear actuator. Mechatronics 2009, 19, 1116–1125. [Google Scholar] [CrossRef]
- Kohls, N.; Dias, B.; Mensah, Y.; Ruddy, B.P.; Mazumdar, Y.C. Compliant Electromagnetic Actuator Architecture for Soft Robotics. IEEE Int. Conf. Robot. Autom. (ICRA) 2020, 9042–9049. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, W.; Zhang, Z. Liftoff of an Electromagnetically Driven Insect-Inspired Flapping-Wing Robot. IEEE Trans. Robot. 2016, 32, 1285–1289. [Google Scholar] [CrossRef]
- Ko, Y.; Na, S.; Lee, Y.; Cha, K.; Ko, S.Y.; Park, J.; Park, S. A jellyfish-like swimming mini-robot actuated by an electromagnetic actuation system. Smart Mater. Struct. 2012, 21, 1–10. [Google Scholar] [CrossRef]
- Shin, B.H.; Lee, K.-M.; Kim, Y. Miniaturized Dual Electromagnetic Oscillatory Actuator. Adv. Sci. Technol. Lett. 2014, 46, 56–59. [Google Scholar]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Forward Kinematics: The Denavit-Hartenberg Convention. In Robot Modeling and Control, 2nd ed.; Wiley: New York, NY, USA, 2005; pp. 61–82. [Google Scholar]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Inverse Kinematics Problem. In Robotics: Modelling, Planning and Control, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 90–100. [Google Scholar]
- Shi, J.; Tomasi, C. Good Features to Track. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Lucas, B.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision (IJCAI). In Proceedings of the 7th International Joint Conference on Artificial Intelligence, Vancouver, BC, Canada, 24–28 August 1981; pp. 674–679. [Google Scholar]
- Tomasi, C.; Kanade, T. Detection and Tracking of Point Features. Int. J. Comput. Vis. 1991. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | d | a | ||
|---|---|---|---|---|
| 1 | 0 | 0 | ||
| 2 | 0 | 0 | ||
| 3 | 0 | 0 | ||
| 4 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mansour, N.A.; Shin, B.; Ryu, B.; Kim, Y. Development of a Novel Miniaturized Electromagnetic Actuator for a Modular Serial Manipulator. Actuators 2021, 10, 14. https://doi.org/10.3390/act10010014
Mansour NA, Shin B, Ryu B, Kim Y. Development of a Novel Miniaturized Electromagnetic Actuator for a Modular Serial Manipulator. Actuators. 2021; 10(1):14. https://doi.org/10.3390/act10010014
Chicago/Turabian StyleMansour, Nader A., Buhyun Shin, Bongjo Ryu, and Youngshik Kim. 2021. "Development of a Novel Miniaturized Electromagnetic Actuator for a Modular Serial Manipulator" Actuators 10, no. 1: 14. https://doi.org/10.3390/act10010014
APA StyleMansour, N. A., Shin, B., Ryu, B., & Kim, Y. (2021). Development of a Novel Miniaturized Electromagnetic Actuator for a Modular Serial Manipulator. Actuators, 10(1), 14. https://doi.org/10.3390/act10010014