Choreographic and Somatic Approaches for the Development of Expressive Robotic Systems

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
Domin: ...Man is a being that does things such as feeling happiness, plays the violin, likes to go for a walk, and all sorts of other things which are simply not needed. No, wait. Which are simply not needed for activities such as weaving or calculating. A petrol engine doesn’t have any ornaments or tassels on it, and making an artificial worker is just like making a petrol engine. The simpler you make production the better you make the product. What sort of worker do you think is the best?Helena: The best sort of worker? I suppose one who is honest and dedicated.Domin: No. The best sort of worker is the cheapest worker. The one that has the least needs. What young Rossum invented was a worker with the least needs possible. He had to make him simpler. He threw out everything that wasn’t of direct use in his work, that’s to say, he threw out the man and put in the robot. Miss Glory, robots are not people. They are mechanically much better than we are, they have an amazing ability to understand things, but they don’t have a soul. Young Rossum created something much more sophisticated than Nature ever did—technically at least!
1.1. Systems of Embodied Motion
1.2. Choreography as Body-Based Research
1.3. Improvisational Technology
1.4. Tools for Creators
1.5. Expressive Robotics
2. Methods: Embodied Practices for Roboticists Developed from Choreography and Somatics
2.1. Bringing Movement to the Foreground
2.2. Weight, Flow, Breath, and Group Sensing
2.3. Kinesphere Exploration Through Spatial Pulls
2.4. Written and Embodied Movement Observation
- Engage in free movement improvisation in response to the stimuli of varying musical selections
- Engage in free movement improvisation in response to words (adjectives) that evoke qualitative movement responses
- Playing children’s games, like Red Rover, Ring-Around-The-Rosey, and Duck-Duck-Goose, which naturally elicit playful, dynamic motion profiles (which easily produce short moments of complex Effort constellations, such as States and Drives, providing fodder for discussion)
- Break into groups that are each given an Effort Motif, e.g., three symbols describing distinct motion quality, and have the group create a phrase of movement that uses them, explicating a context (note that it’s unlikely, bordering on impossible, that two groups will come up with the same motion sequence)
- Show movement sequences that are generated from the same Motif side-by-side
- Discuss as a group: What is essential about the movements and their commonalities? How is this revealed through the quality descriptors in the Motif? What makes the sequences different and “mean” different things?
2.5. Establishing the Malleability of Meaning in Movement
3. Results: Progress and Principles in Developing Expressive Robotic Systems
3.1. Irreplaceable Body-Based Research in Robotics
3.2. The Case for Manual Movement Design
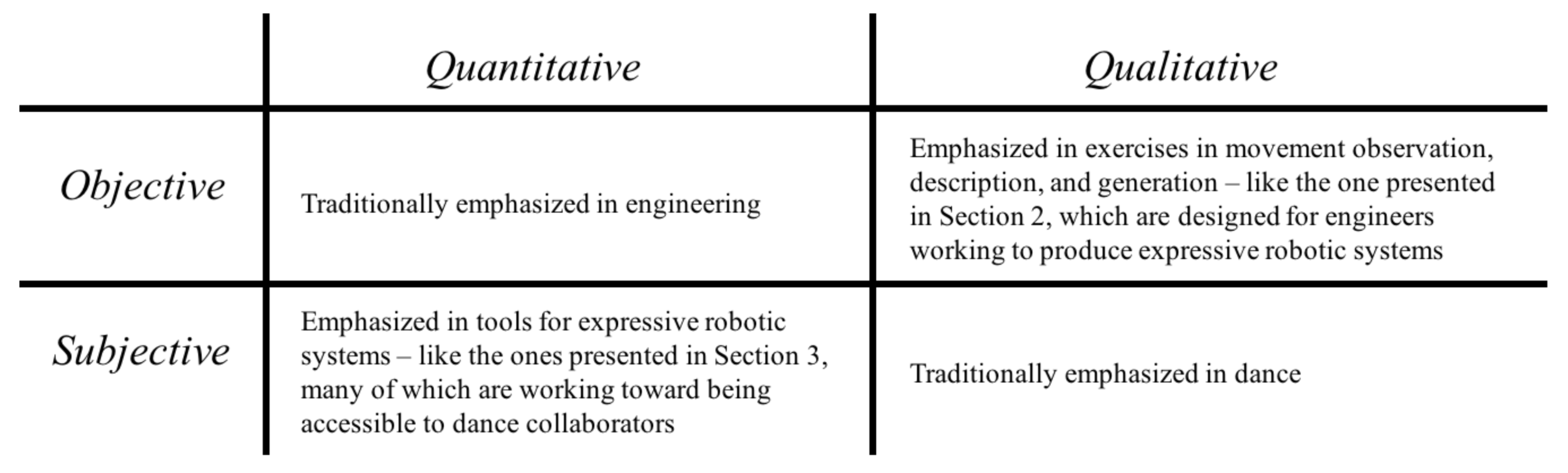
3.3. Objective, Qualitative Movement Observation (to Support Subjective Conclusions)
4. Conclusions: Toward Widespread Collaboration between Dancers and Roboticists
...the truest creativity of the digital age came from those who connected the arts and sciences.—The Innovators (Isaacson 2014)
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Detailed Activity List
- Between 2013 and 2017 Catherine Maguire offered five workshops in LBMS for the RAD Lab. These ranged from one-on-one sessions to group sessions with all lab members and sponsored from the lab start up packages at UVA and UIUC as well as a grant from the UVA Data Science Institute.
- In Fall 2014 Kim Brooks Mata and Amy LaViers co-developed and co-taught DAN 3559/ENG 3501 Electronic Identity and Embodied Technology Atelier, cross-listed between the dance and engineering programs at the University of Virginia and funded by the Jefferson Trust.
- As part of a research project, “Choreography of Platform-Invariant Motion Primitives” Amy LaViers organized two three day training workshops at UIUC. The first, in June 2016, was co-developed and co-taught with Catherine Maguire and Karen Studd; the second, in June 2017, was co-developed and co-taught with Catherine Maguire, Catie Cuan, and Riley Watts. In addition to travel expenses covered, the facilitators were paid at one of two hourly rates (one for consulting and a higher rate for teaching). These workshops were sponsored by DARPA grant number D16AP00001.
- Karen Bradley advised Amy LaViers’ CMA thesis project entitled “Preparing to Cook with Eric: Function and Expression Within Recipe”, which was completed in August 2016 through the Laban/Bartenieff Institute of Movement Studies (LIMS).
- Amy LaViers organized a workshop at Robotics: Science and Systems (RSS) in 2016 entitled “Let’s Move: Embodied Experience and Movement Observation for Roboticists”. The workshop featured Elizabeth Jochum, Heather Knight, and Kayhan Ozcimder as speakers. Attendees included participants from industry and academia including CMU, JPL, U Mich, Duke, WPI, Google, Sphero, UIUC, Princeton, and Aalborg University.
- Amy LaViers co-organized an invited, follow on workshop in 2017 for RSS with Kayhan Ozcimder entitled “Experimenting with Movement Observation”. Attendees included participants from MIT, UIUC, Princeton, and U Mich.
- In April 2017 Amy LaViers attended Art, Tech, Psyche III at Harvard University where she also spent extended time meeting with Ilya Vidrin and Riley Watts discussing the phenomena of partnering in dance; these conversations have led to an inprogress independent study project for a master’s student in mechanical engineering at UIUC.
- In June 2017 Catie Cuan, a New York based choreographer, spent a month in residence at the RAD Lab in Urbana, IL. As part of this residency she taught classes to lab members and developed an artistic piece alongside Amy LaViers, Ishaan Pakrasi, and Novoneel Chakraborty. The piece “Time to Compile”, and was presented as a work in progress on 30 June 2017. This work is sponsored by the lab start up package and NSF grant number 1528036. User studies are in progress using this material to modulate perception of in home robots.
- In addition to training and education for lab members, Catherine Maguire has consulted on two research projects where her expertise in movement theory and observation have been integral parts of the technical output in the lab. In addition to co-authoring resulting papers, she has been paid an hourly consulting rate on these projects, funded by NSF grant numbers 1528036 and 1701295.
- In Spring 2017 a new course ME 598: High-level Robotic Control and Movement Representation was offered at UIUC. The course emphasized embodied movement exploration, writing, and interdisciplinary research. An “Expressivity Expansion Pack” for the Robot Design Game3 was produced as a formal output of this class.
- Over the years two regular lab activities have been developed that support this line of work in the group in addition to the group’s weekly lab meeting. We call them “writing hour” and “movement hour”. In each, we take time to practice descriptive writing and embodied movement exploration (led by Amy LaViers or a guest facilitator like Catie Cuan who helped establish “movement hour”) in order to supplement the traditional education students receive in engineering. Students in the group who have contributed as co-authors here are Novoneel Chakraborty, Madison Heimerdinger, Umer Huzaifa, Reika McNish, Alexandra Nilles, Ishaan Pakrasi, and Alexander Zurawski.
- Lab outreach activities also benefit from these workshops. The lab holds outreach activities for students in age ranges from elementary to high school. All of these activities work to showcase robotics in an accessible manner and feature embodied movement exploration as well as quantitative and qualitative objective description of movement of machines and humans.
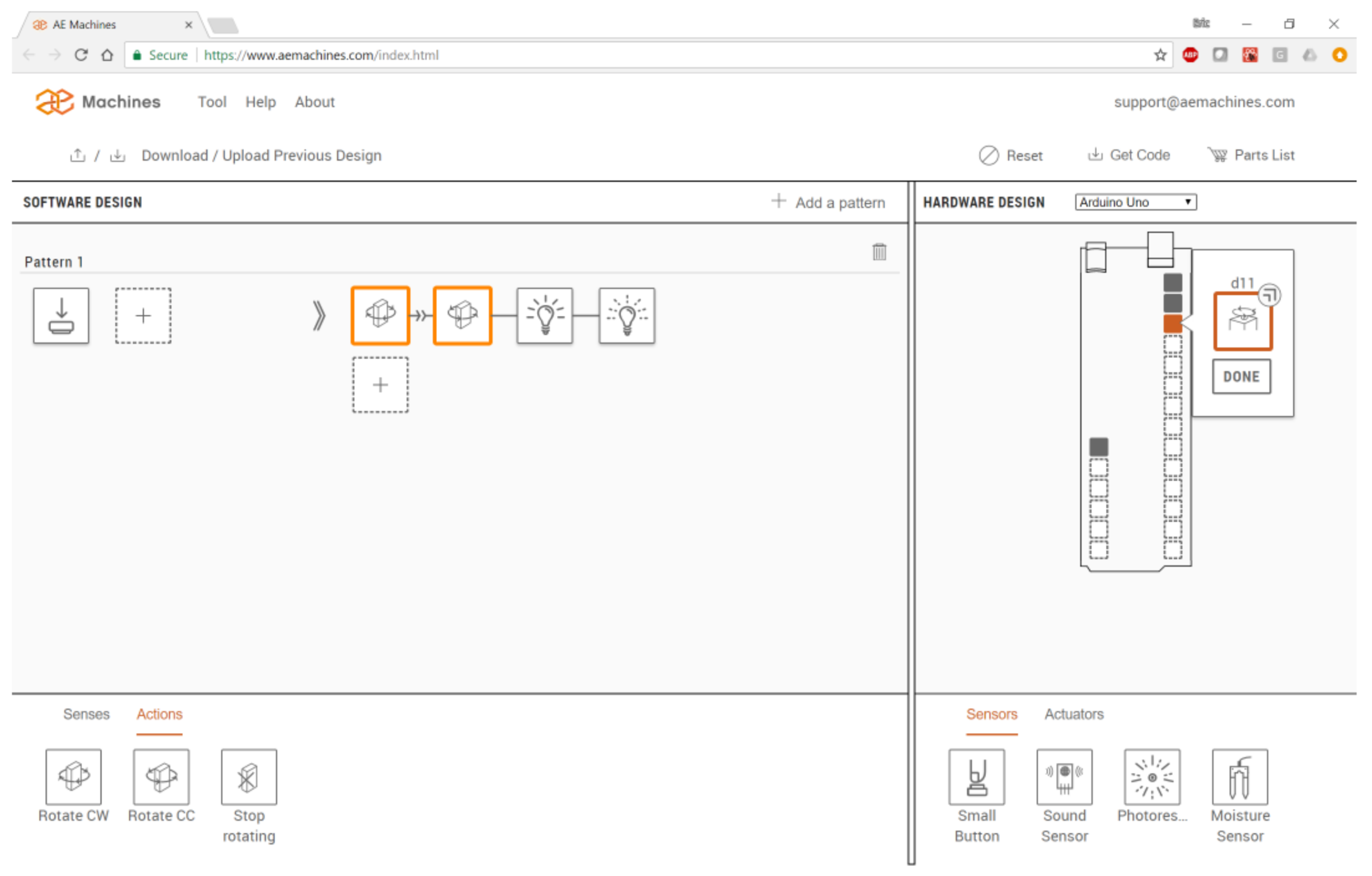
- A commercial spin off of the lab, start up AE Machines, was founded by Eric Minnick and Amy LaViers. The start up has received seed funding from the NSF grant #1621861 and won Product Design of the Year at the 4th Revolution Awards in Chicago, IL.
References
- Abrahamson, Dor. 2004. Embodied Spatial Articulation: A Gesture Perspective on Student Negotiation Between Kinesthetic Schemas and Epistemic Forms in Learning Mathematics. Paper presented at the Twenty Sixth Annual Meeting of the North American Chapter of the International Group for the Psychology of Mathematics Education, Toronto, ON, Canada, October 21–24, vol. 2, pp. 791–97. [Google Scholar]
- Alexander, Frederick Matthias. 1990. The Alexander Technique: The Essential Writings of F. Matthias Alexander. Edited by Edward Maisel. New York: Carol Publishing Group. [Google Scholar]
- Argall, Brenna D., Sonia Chernova, Manuela Veloso, and Brett Browning. 2009. A survey of robot learning from demonstration. Robotics and Autonomous Systems 57: 469–83. [Google Scholar] [CrossRef]
- Banes, Sally. 1983. Democracy’s Body: Judson Dance Theater, 1962–1964. Number 43. Durham: Duke University Press. [Google Scholar]
- Banes, Sally. 2011. Terpsichore in Sneakers: Post-Modern Dance. Middletown: Wesleyan University Press. [Google Scholar]
- Barakova, Emilia I., Roos van Berkel, Liang Hiah, Yu-Fang Teh, and Ceil Werts. 2015. Observation Scheme for Interaction With Embodied Intelligent Agents Based on Laban Notation. Paper presented at 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, December 6–9; pp. 2525–30. [Google Scholar]
- Barnett, Scot, and Casey Boyle. 2016. Rhetoric, Through Everyday Things. Tuscaloosa: University of Alabama Press. [Google Scholar]
- Bartenieff, Irmgard, and Dori Lewis. 1980. Body Movement: Coping with the Environment. New York: Routledge. [Google Scholar]
- Bradley, E., and J. Stuart. 1998. Using chaos to generate variations on movement sequences. Chaos: An Interdisciplinary Journal of Nonlinear Science 8: 800–7. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Bradley, Karen. Kohn. 2008. Rudolf Laban. New York: Routledge. [Google Scholar]
- Brand, Matthew, and Aaron Hertzmann. 2000. Style Machines. Paper presented at the 27th Annual Conference on Computer Graphics and Interactive Techniques, New Orleans, LA, USA, July 23–28; New York: ACM Press/Addison-Wesley Publishing Co., pp. 183–92. [Google Scholar]
- Breazeal, Cynthia, and Brian Scassellati. 1999. A context-dependent attention system for a social robot. rn 255: 3. [Google Scholar]
- Breazeal, C. L. 2004. Designing Sociable Robots. Cambridge: MIT Press. [Google Scholar]
- Calvert, Tom W., Armin Bruderlin, Sang Mah, Thecla Schiphorst, and Chris Welman. 1993. The Evolution of an Interface for Choreographers. Paper presented at the INTERACT’93 and CHI’93 Conference on Human Factors in Computing Systems, Amsterdam, The Netherlands, April 24–29; pp. 115–22. [Google Scholar]
- Čapek, Karel. 2004. RUR (Rossum’s Universal Robots). New York: Penguin. [Google Scholar]
- Cuan, Catie, Ishaan Pakrasi, and Amy LaViers. 2018. Time to Compile: An Interactive Art Installation. Paper presented at Intersections: The Ammerman Center for Arts and Technology 16th Biennial Symposium, New London, CT, USA, February 15–17. [Google Scholar]
- Cohen, Bonnie Bainbridge, Lisa Nelson, and Nancy Stark Smith. 2012. Sensing, Feeling, and Action: The Experiential Anatomy of Body-Mind Centering®. Toronto: Contact editions. [Google Scholar]
- Copeland, Roger. 1993. Dance, Feminism, and the Critique of the Visual. In Dance, Gender and Culture. London: Palgrave Macmillan, pp. 139–50. [Google Scholar]
- Copeland, R. 2004. Merce Cunningham: The Modernizing of Modern Dance. New York: Routledge. [Google Scholar]
- Cunningham, M. 1997. The impermanent art. In Vaughn, Merce Cunningham: Fifty Years. New York: Aperture. [Google Scholar]
- Darling, Kate, Palash Nandy, and Cynthia Breazeal. 2015. Empathic Concern and the Effect of Stories in Human-Robot Interaction. Paper presented at 2015 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Kobe, Japan, August 31–September 4; pp. 770–75. [Google Scholar]
- De Sousa Junior, Samuel Felix, and Mario Fernando Montenegro Campos. 2011. Shall We Dance? a Music-Driven Approach for Mobile Robots Choreography. Paper presented at 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, September 25–30; pp. 1974–79. [Google Scholar]
- Dragan, Anca D., Kenton C. T. Lee, and Siddhartha S. Srinivasa. 2013. Legibility and Predictability of Robot Motion. Paper presented at 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, March 3–6; pp. 301–8. [Google Scholar]
- Eddy, Martha. 2009. A brief history of somatic practices and dance: Historical development of the field of somatic education and its relationship to dance. Journal of Dance & Somatic Practices 1: 5–27. [Google Scholar]
- El-Jiz, Michael, and Luis Rodrigues. 2017. Trajectory Planning and Control of a Quadrotor Choreography for Real-Time Artist-in-the-Loop Performances. Unmanned Systems, 1–13. [Google Scholar] [CrossRef]
- Elgin, Catherine Z. 2010. Exemplification and the Dance. In Philosophie de la Dance. Edited by Roger Pouivet. Rennes: Presses Universitaire de Rennes. [Google Scholar]
- Etemad, S. Ali, and Ali Arya. 2016. Expert-Driven Perceptual Features for Modeling Style and Affect in Human Motion. IEEE Transactions on Human-Machine Systems 46: 534–45. [Google Scholar] [CrossRef]
- Feldenkrais, Moshé. 1972. Awareness through Movement. New York: Harper & Row, vol. 1977. [Google Scholar]
- Forlizzi, Jodi, and Carl DiSalvo. 2006. Service Robots in the Domestic Environment: A Study of the Roomba Vacuum in the Home. Paper presented at the 1st ACM SIGCHI/SIGART conference on Human-robot interaction, Salt Lake City, UT, USA, March 2–3; pp. 258–65. [Google Scholar]
- Forsythe, William. 2012. Improvisation Technologies: A Tool for the Analytical Dance Eye. Berlin: Hatje Cantz. [Google Scholar]
- Foster, Mary Ann. 2004. Somatic Patterning: How to Improve Posture and Movement and Ease Pain. London: Pearson. [Google Scholar]
- Gielniak, Michael, C. Karen Liu, and Andrea L. Thomaz. 2010. Stylized Motion Generalization Through Adaptation of Velocity Profiles. Paper presented at 2010 IEEE RO-MAN, Viareggio, Italy, September 13–15; pp. 304–9. [Google Scholar]
- Gillies, M. 2009. Learning finite-state machine controllers from motion capture data. IEEE Transactions on Computational Intelligence and AI in Games 1: 63–72. [Google Scholar] [CrossRef]
- Goehr, Lydia. 2014. Improvising impromptu, or, what to do with a broken string. In The Oxford Handbook of Critical Improvisation Studies. New York: Oxford University Press, vol. 1. [Google Scholar]
- Goldman Schuyler, Kathryn. 2010. Increasing leadership integrity through mind training and embodied learning. Consulting Psychology Journal: Practice and Research 62: 21. [Google Scholar] [CrossRef]
- Groves, Rebecca, Norah Zuniga Shaw, and Scott DeLahunta. 2007. Talking about Scores: William Forsythe’s Vision for a New Form of “Dance Literature”. Berlin: Transcript Verlag. [Google Scholar]
- Guest, Ann Hutchinson. 1977. Labanotation: Or, Kinetography Laban: The System of Analyzing and Recording Movement. TAB paperback, Theatre Arts Books. New York: Taylor and Francis. [Google Scholar]
- Guest, Ann Hutchinson. 1996. Labanotation, or, Kinetography Laban: The System of Analyzing and Recording Movement. New York: Oxford University Press. [Google Scholar]
- Hackney, Peggy. 1998. Making Connections: Total Body Integration through Bartenieff Fundamentals. New York: Routledge. [Google Scholar]
- Hall, Fernau. 1964. Dance notation and choreology. The British Journal of Aesthetics 4: 58. [Google Scholar] [CrossRef]
- Hanna, Thomas. 1980. The Body of Life. New York: Knopf. [Google Scholar]
- Hawhee, Debra. 2004. Bodily Arts: Rhetoric and Athletics in Ancient Greece. Austin: University of Texas Press. [Google Scholar]
- Heimerdinger, Madison, and Amy LaViers. 2018. Modeling the Interactions of Context and Style on Affect in Motion Perception: Stylized Gaits Across Multiple Environmental Contexts. Under review. [Google Scholar]
- Heimerdinger, Madison, and Amy LaViers. 2017. Influence of Environmental Context on Recognition Rates of Stylized Walking Sequences. Paper presented at 9th International Conference on Social Robotics (ICSR), Tsubuka, Japan, November 22–24; pp. 272–82. [Google Scholar]
- Hendriks, Bram, Bernt Meerbeek, Stella Boess, Steffen Pauws, and Marieke Sonneveld. 2011. Robot vacuum cleaner personality and behavior. International Journal of Social Robotics 3: 187–95. [Google Scholar] [CrossRef]
- Huang, L., and P. Hudak. 2003. Dance: A Declarative Language for the Control of Humanoid Robots. Technical report. Yale: Department of Computer Science, Yale University New Haven. [Google Scholar]
- Husserl, Edmund. 2012. Ideas: General Introduction to Pure Phenomenology. New York: Routledge. [Google Scholar]
- Huzaifa, Umer, and Amy Laviers. 2016. Control Design for Planar Model of a Core-located Actuation Walker. Paper presented at 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, June 26–29. [Google Scholar]
- Huzaifa, Umer, Crispin Bernier, Zachary Calhoun, Gerald Heddy, Colleen Kohout, Brett Libowitz, Anne Moenning, Jason Ye, Catherine Maguire, and Amy Laviers. 2016. Embodied Movement Strategies for Development of a Core-located Actuation Walker. Paper presented at Biomedical Robotics and Biomechatronics (BioRob), Singapore, June 26–29. [Google Scholar]
- Isaacson, Walter. 2014. The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital Revolution. New York: Simon and Schuster. [Google Scholar]
- Sher, Jang, Anum Umer Huzaifa, Jialu Li, Varun Jain, Alexander Zurawski, and Amy LaViers. 2018. An Embodied, Platform-invariant Architecture for Connecting High-level Spatial Commands to Platform Articulation. Robotics and Autonomous Systems. Special Issue on Human Movement Understanding. under review. [Google Scholar]
- Kaufman, James C., and John Baer. 2005. Creativity Across Domains: Faces of the Muse. Mahwah: Lawrence Erlbaum Associates. [Google Scholar]
- Kennedy, George A., and Aristotle. 2006. On Rhetoric: A Theory of Civic Discourse. Oxford: Oxford University Press. [Google Scholar]
- Knight, Heather, and Matthew Gray. 2012. Acting lesson with robot: Emotional gestures. Paper presented at 2012 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Boston, MA, USA, March 5–8; pp. 407–7. [Google Scholar]
- Knight, Heather, and Reid Simmons. 2014. Expressive motion with x, y and theta: Laban effort features for mobile robots. Paper presented at the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, August 25–29; pp. 267–73. [Google Scholar]
- Knight, Heather, and Reid Simmons. 2015. Layering Laban Effort Features on Robot Task Motions. Paper presented at the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts, Portland, OR, USA, March 2–5; pp. 135–36. [Google Scholar]
- Knight, Heather, and Reid Simmons. 2016. Laban head-motions convey robot state: A call for robot body language. Paper presented at 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, May 16–21; pp. 2881–88. [Google Scholar]
- Knight, Heather, Manuela Veloso, and Reid Simmons. 2015. Taking candy from a robot: Speed features and candy accessibility predict human response. Paper presented at 2015 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Kobe, Japan, August 31–September 4; pp. 355–62. [Google Scholar]
- Laban, R., and F. C. Lawrence. 1947. Effort. New York: Macdonald and Evans. [Google Scholar]
- Laban, Rudolf, and Lisa Ullmann. 1966. Choreutics. New York: Macdonald and Evans. [Google Scholar]
- Laban, Rudolf, and Lisa Ullmann. 1971. The Mastery of Movement. New York: Macdonald and Evans. [Google Scholar]
- Lambert, Carrie. 1999. Moving Still: Mediating Yvonne Rainer’s “Trio A”. October 89: 87–112. [Google Scholar] [CrossRef]
- Lambert-Beatty, Carrie. 2008. Being Watched: Yvonne Rainer and the 1960s. Cambridge: MIT Press. [Google Scholar]
- Latey, Penelope. 2001. The Pilates method: History and philosophy. Journal of Bodywork and Movement Therapies 5: 275–82. [Google Scholar] [CrossRef]
- LaViers, Amy. 2018. Programmed Improvisation Inspired from Autonomous Humanoids. In Handbook on Improvisation in Dance. New York: Oxford University Press, (to appear). [Google Scholar]
- Lindgren, Robb, and Mina Johnson-Glenberg. 2013. Emboldened by embodiment: Six precepts for research on embodied learning and mixed reality. Educational Researcher 42: 445–52. [Google Scholar] [CrossRef]
- Liu, C. Karen, Aaron Hertzmann, and Zoran Popović. 2005. Learning physics-based motion style with nonlinear inverse optimization. ACM Transactions on Graphics (TOG) 24: 1071–81. [Google Scholar] [CrossRef]
- Lourens, Tino, Roos van Berkel, and Emilia Barakova. 2010. Communicating emotions and mental states to robots in a real time parallel framework using Laban movement analysis. Robotics and Autonomous Systems 58: 1256–65. [Google Scholar] [CrossRef]
- Lubart, T. 2005. How can computers be partners in the creative process: Classification and commentary on the special issue. International Journal of Human-Computer Studies 63: 365–69. [Google Scholar] [CrossRef]
- Maletic, Vera. 1987. Body, Space, Expression. Berlin: Walter de Gruyter & Co. [Google Scholar]
- Masuda, Megumi, and Shohei Kato. 2010. Motion Rendering System for Emotion Expression of Human Form Robots Based on Laban Movement Analysis. Paper presented at 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, September 13–15; pp. 324–29. [Google Scholar]
- Masuda, Megumi, Shohei Kato, and Hidenori Itoh. 2009. Emotion Detection From Body Motion of Human Form Robot Based on Laban Movement Analysis. Paper presented at International Conference on Principles and Practice of Multi-Agent Systems, Nagoya, Japan, December 14–16; pp. 322–34. [Google Scholar]
- Michalowski, Marek P., Selma Sabanovic, and Hideki Kozima. 2007. A Dancing Robot for Rhythmic Social Interaction. Paper presented at 2007 2nd ACM/IEEE International Conference on Human-Robot Interaction (HRI), Arlington, VA, USA, March 9–11; pp. 89–96. [Google Scholar]
- Nilles, Alexandra, Chase Gladish, Mattox Beckman, and Amy LaViers. 2018. Improv: Live Coding for Robot Motion Design. Paper present at the 5th International Conference on Movement and Computing (MOCO), Genoa, Italy, June 28–30. under review. [Google Scholar]
- Okamoto, Takahiro, Takaaki Shiratori, Shunsuke Kudoh, Shin’ichiro Nakaoka, and Katsushi Ikeuchi. 2014. Toward a dancing robot with listening capability: Keypose-based integration of lower-, middle-, and upper-body motions for varying music tempos. IEEE Transactions on Robotics 30: 771–78. [Google Scholar] [CrossRef]
- Özcimder, Kayhan, Biswadip Dey, Rebecca J. Lazier, Daniel Trueman, and Naomi E. Leonard. 2016. Investigating Group Behavior in Dance: An Evolutionary Dynamics Approach. Paper presented at American Control Conference (ACC), Boston, MA, USA, July 6–8; pp. 6465–70. [Google Scholar]
- Pakrasi, Ishaan, and Amy LaViers. 2018. A Design Methodology for Abstracting Character Archetypes onto Robotic Systems. Paper present at the 5th International Conference on Movement and Computing (MOCO), Genoa, Italy, June 28–30. under review. [Google Scholar]
- Pallant, Cheryl. 2006. Contact Improvisation: An Introduction to a Vitalizing Dance Form. Jefferson: McFarland. [Google Scholar]
- Patla, A. 1982. Aspects ofthe Kinematic Simulation of Human Movement. IEEE Computer Graphics and Applications 2: 41–50. [Google Scholar]
- Peng, Hua, Changle Zhou, Huosheng Hu, Fei Chao, and Jing Li. 2015. Robotic dance in social robotics—A taxonomy. IEEE Transactions on Human-Machine Systems 45: 281–93. [Google Scholar] [CrossRef]
- Peters, G. 2009. The Philosophy of Improvisation. Chicago: University of Chicago Press. [Google Scholar]
- Pinel, Florian, Lav R. Varshney, and Debarun Bhattacharjya. 2015. A culinary computational creativity system. In Computational Creativity Research: Towards Creative Machines. Paris: Atlantis Press, pp. 327–46. [Google Scholar]
- Rainer, Yvonne. 1966. A quasi survey of some ‘Minimalist’tendencies in the quantitatively Minimal dance activity midst the plethora, or an analysis of trio A. In What’s Dance. Edited by Roger Copeland and Marshall Cohen. London: Routledge, pp. 325–32. [Google Scholar]
- Rainer, Yvonne. 2006. No Manifesto. Available online: https://conversations.e-flux.com/t/yvonne-rainer-no-manifesto/1454 (accessed on 31 October 2017).
- Rett, Jorg, and Jorge Dias. 2007. Human-Robot Interface With Anticipatory Characteristics Based On Laban Movement Analysis and Bayesian Models. Paper presented at 2007 IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, June 13–15; pp. 257–68. [Google Scholar]
- Rett, Joerg, Jorge Dias, and Juan-Manuel Ahuactzin. 2008. Laban Movement Analysis Using a Bayesian Model and Perspective Projections. London: INTECH Open Access Publisher. [Google Scholar]
- Rossano, Gregory F., Carlos Martinez, Mikael Hedelind, Steve Murphy, and Thomas A. Fuhlbrigge. 2013. Easy Robot Programming Concepts: An Industrial Perspective. Paper presented at 2013 IEEE International Conference on Automation Science and Engineering (CASE), Madison, WI, USA, August 17–20; pp. 1119–26. [Google Scholar]
- Schiphorst, Thecla. 1993. A Case Study of Merce Cunningham’s Use of the Lifeforms Computer Choreographic System in the Making of Trackers. Ph.D. thesis, Arts and Social Sciences: Special Arrangements. Simon Fraser University, Burnaby, BC, Canada. [Google Scholar]
- Schoellig, Angela P., Hallie Siegel, Federico Augugliaro, and Raffaello D’Andrea. 2014. So you think you can dance? Rhythmic flight performances with quadrocopters. In Controls and Art. London: Springer, pp. 73–105. [Google Scholar]
- Sefidgar, Yasaman S., Prerna Agarwal, and Maya Cakmak. 2017. Situated Tangible Robot Programming. Paper presented at the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, March 6–9; pp. 473–82. [Google Scholar]
- Siu, Ka-Chun, Irene H. Suh, Mukul Mukherjee, Dmitry Oleynikov, and Nick Stergiou. 2010. The effect of music on robot-assisted laparoscopic surgical performance. Surgical Innovation 17: 306–11. [Google Scholar] [CrossRef] [PubMed]
- Studd, Karen A., and Laura L. Cox. 2013. Everybody is a Body. Indianapolis: Dog Ear Publishing. [Google Scholar]
- Sutil, Nicolas Salazar. 2015. Motion and Representation: The Language of Human Movement. Cambridge: MIT Press. [Google Scholar]
- Tellex, Stefanie, Thomas Kollar, Steven Dickerson, Matthew R. Walter, Ashis Gopal Banerjee, Seth Teller, and Nicholas Roy. 2011. Understanding Natural Language Commands for Robotic Navigation and Mobile Manipulation. Paper presented at Twenty-Fifth AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, August 7–11, vol. 1, p. 2. [Google Scholar]
- Torresani, Lorenzo, Peggy Hackney, and Christoph Bregler. 2007. Learning motion style synthesis from perceptual observations. Advances in Neural Information Processing Systems 20: 1393–400. [Google Scholar]
- Truitt, Elly R. 2015. Medieval Robots: Mechanism, Magic, Nature, and Art. Philadelphia: University of Pennsylvania Press. [Google Scholar]
- Von Laban, R. 1966. The Language of Movement: A guidebook to Choreutics. New York: Plays, inc. [Google Scholar]
- Weinberg, Brian Blosser, Trishul Mallikarjuna, and Aparna Raman. 2009. The Creation of a Multi-Human, Multi-Robot Interactive Jam Session. Presented at the New Interfaces for Musical Expression Conference NIME, Pittsburg, PA, USA, June 4–6; pp. 70–73. [Google Scholar]
- Whitney, David, Eric Rosen, Elizabeth Phillips, George Konidaris, and Stefanie Tellex. 2017a. Comparing Robot Grasping Teleoperation across Desktop and Virtual Reality with ROS Reality. Technical report. Providence: Department of Computer Science, Brown University. [Google Scholar]
- Whitney, David, Eric Rosen, James MacGlashan, Lawson Wong, and Stefanie Tellex. 2017b. Reducing Errors in Object-Fetching Interactions through Social Feedback. Paper presented at International Conference on Robotics and Automation, Singapore, May 29–June 3. [Google Scholar]
- Young, James E., JaYoung Sung, Amy Voida, Ehud Sharlin, Takeo Igarashi, Henrik I. Christensen, and Rebecca E. Grinter. 2011. Evaluating human-robot interaction. International Journal of Social Robotics 3: 53–67. [Google Scholar] [CrossRef]
| 1 | Somatic approaches, being distinguished from a broad category of body-based approaches, allow us to extract knowledge from experience of the body from an internal perspective, which is called “soma”, a distinct idea from the body itself (Eddy 2009). |
| 2 | Note that meaningful movement may not necessarily be narrative. |
| 3 |





© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
LaViers, A.; Cuan, C.; Maguire, C.; Bradley, K.; Brooks Mata, K.; Nilles, A.; Vidrin, I.; Chakraborty, N.; Heimerdinger, M.; Huzaifa, U.; et al. Choreographic and Somatic Approaches for the Development of Expressive Robotic Systems. Arts 2018, 7, 11. https://doi.org/10.3390/arts7020011
LaViers A, Cuan C, Maguire C, Bradley K, Brooks Mata K, Nilles A, Vidrin I, Chakraborty N, Heimerdinger M, Huzaifa U, et al. Choreographic and Somatic Approaches for the Development of Expressive Robotic Systems. Arts. 2018; 7(2):11. https://doi.org/10.3390/arts7020011
Chicago/Turabian StyleLaViers, Amy, Catie Cuan, Catherine Maguire, Karen Bradley, Kim Brooks Mata, Alexandra Nilles, Ilya Vidrin, Novoneel Chakraborty, Madison Heimerdinger, Umer Huzaifa, and et al. 2018. "Choreographic and Somatic Approaches for the Development of Expressive Robotic Systems" Arts 7, no. 2: 11. https://doi.org/10.3390/arts7020011
APA StyleLaViers, A., Cuan, C., Maguire, C., Bradley, K., Brooks Mata, K., Nilles, A., Vidrin, I., Chakraborty, N., Heimerdinger, M., Huzaifa, U., McNish, R., Pakrasi, I., & Zurawski, A. (2018). Choreographic and Somatic Approaches for the Development of Expressive Robotic Systems. Arts, 7(2), 11. https://doi.org/10.3390/arts7020011