2.2. The Homographies on Projective Space
To fix the ideas on these homographies, we start from the following geometric situation. Let
be a four-dimensional differential manifold considered as the
no-time oriented, time orientable spacetime manifold, and
a maximal atlas on
constituted by systems of local coordinates
(
) on the open sets of chart in
. Let
be one of these open sets and
e any point in
U. Then, we denote by
one of the open neighborhoods of
e containing the point
of coordinates
. Among the local coordinates that can be considered are the Riemann normal coordinates attached to the event
e. Then, these Riemann normal coordinates
are considered to be
inhomogeneous coordinates corresponding to the
homogeneous coordinates
(
) such that
where
is fixed and obviously
. In everything that follows, we will consider essentially and only the case
. Then, let
be an element of
. In addition, we denote by
the sub-matrix of
such that
.
1 Then, the coordinates
are transformed by
into the new homogeneous coordinates
as follows:
The inhomogeneous coordinates
are then obviously transformed into the new inhomogeneous coordinates
by birational transformations
(homographies) such that
, i.e., we have
More generally, the group of such homographies is the projective group which acts transitively on the quotient homogeneous space of points where G is the parabolic subgroup of linear transformations . The latter define the so-called (general) homologies keeping fixed the origin e of coordinates (i.e., whatever is). Thus, any matrix is such that . In addition, the no-time oriented spacetime manifold is then locally homeomorphic in a particular way to the hyperbolic space of which the definition we recall is the following.
2.3. The Hyperbolic and “Pseudo-Hyperbolic” Spaces
Let the non-degenerate quadratic form
Q on
be such that
and the corresponding pseudo-Euclidean metric
. In addition, let the canonical projecting map
be such that
with, as a particular case,
whenever
. Furthermore, we denote by
the open set of lines in
generated by
U such that
.
2 The variety
is homeomorphic to
noting besides that the cell-decomposition of
is
. Thus, we have also
. Then,
equipped with the metric
restricted to the submanifold
of elements
U such that
and
defines a (not pseudo-)Riemannian analytic submanifold of
called
hyperbolic space .
It is important to note that the projective space
is the space of lines in
passing through the origin and that the lines in
intersect the variety
into a single point only thus univocally representing a point of the projective space. More precisely, let
U be such that
, i.e.,
and
. Then, the Euclidean metric
defined on
is the pull-back
of
by the section
and then we obtain
In particular, we deduce also that . The metric is a Euclidean metric which is invariant, like , with respect to the restricted Lorentz group of homographies. In addition, acts transitively on . Hence, locally, we have also .
We could have started from a more general situation with a metric on hyperbolic space of the
type. We consider in the whole article only the standard case at first for simplicity’s sake. Other metric classes could of course be considered later. The most general situation would have been to start with a metric
of the form
where the coefficients
would have been homogeneous functions of degree 0 in the variables
.
The hyperbolic space
is a simply connected manifold contrarily to the not simply connected
anti-de Sitter spaces which therefore cannot be ascribed to
. One may object that this would not allow to define a Lorentzian metric on
. However, first, the metric
is only deduced from the definition of
itself defined from the quadratic form
Q and not
. Second, we can easily define a Lorentzian metric
on
from
once
is
time oriented, i.e., if there exists a nowhere vanishing vector field
on
ascribed to a cosmological time. Indeed, let
be the differential 1-form on
dual to
, i.e., such that
, then it can be shown [
15] that the metric
is a Lorentzian metric whenever
, i.e., whenever
is time-like. We can choose for instance
. Then, we obtain a Lorentzian metric such that
and which is the Minkowski metric at the origin
of the system of Riemann normal coordinates. Moreover, this new metric
is the pull-back by
(equivalently, the restriction to
) of the pseudo-Euclidean metric
which is invariant with respect to the pseudo-orthogonal group
associated with the quadratic form
. Thus, because
is a pull-back by
then
is defined on the whole of
.
Definition 1. Let be a non-degenerate quadratic form on and one of the connected sets of points such that (). In addition, let ρ be a homeomorphism from Ω to and a subgroup keeping invariant . By action via ρ or ρ-action of a subgroup , we mean that if is the linear isometric action relative to of any on , then the ρ-action of the subgroup of homographies on Ω is defined by the homeomorphism . Furthermore, we agree to omit the index ρ whenever or .
Definition 2. Let be a subset in Ω and an element in . Then, the definition domain of homography is where is the empty set or an affine hyperplane of codimension 1 (i.e., the ‘singularities hyperplane’). Then, we denote also by the subset such that for any given set .
Lemma 1. Let be any element in and the four-dimensional open ball and . Then, we have , , and .
Proof. From the definition of , we get first . In addition, from the definition of we have . Then, because keeps invariant the quadratic form Q and acts transitively on then the group of homographies acts also transitively on the open ball . As a result, that means that the hyperplanes associated to each homography are outside the open ball , i.e., . Then, we deduce with that where . Also, because and are continuous bijective maps on there are both open-closed maps on .
Second, let be any given element in . Then, is the set of elements such that (I): . Moreover, from the definition of we have necessarily (II): where . Hence, because then if there exists only a unique point such that in . Then, is the tangent space of at . Therefore, necessarily, there exists such that (III): with (IV): . It is then easy to show that there does not exist such that all the conditions (I), (II), (III) and (IV) are satisfied. Then, because and are continuous on and bijective maps then there are open-closed maps on . As a result, since we have and is a closed map on so that is closed, then from which we deduce that and then . In addition, because and are continuous bijective maps on there are both open-closed maps on .
Third, because is defined on set and not on , then is defined on . Hence, we have and similarly . ☐
Property 1. Let ρ be a differentiable bijective map from Ω to and the embedding (i.e., injective immersion) from Ω to the four-dimensional open ball such that . In full generality, differs from identity. Then, we have for any .
Proof. Indeed, we have by definition and . Thus, we obtain . Moreover, is an embedding (not invertible in full generality) from to because the restriction of to is an injective immersion (to ) between manifolds of same dimensions and . ☐
Property 2. If ρ is a diffeomorphism then so is .
Proof. The map from which the inverse of can be defined as invertible. Indeed, let u be a point in , then the point is such that with and . Therefore, we deduce that and therefore is well defined and differentiable for any . Furthermore, as a result, it is a diffeomorphim between and . ☐
As a result, the metric remains invariant with respect to a -action of the group of homographies deduced from the quadratic form of the anti de Sitter space ; the latter being defined by the relation where . Indeed, formally, we obtain for any : . However, the morphim cannot be defined globally on and, moreover, in order to remain on the domain space and defined from the quadratic form Q , we must rather consider the subgroup only where acts linearly on via and which is a non-compact group containing ; the latter acting on the coordinates for . In addition, the homographic action of via and especially not via any section of on is neither transitive nor even locally transitive as shown below.
2.4. The Foliations
Definition 3. Let K be a subgroup of . Then, we call -orbits of the orbits in defined from the homographic actions of homographies where .
Let the quadratic form be such that where . Then, we have also . Moreover, the quadratic forms Q and are invariant with respect to up to same conformal factors; hence their ratio which is defined on from the projecting map . More precisely, we have where which is invariant with respect to . Therefore, the -orbits of are subsets of points such that . Note that we have for any . Indeed, we have and, in addition, where . Hence, we obtain .
Then, two cases are deduced depending on whether or :
If , then, necessarily, and consequently from we obtain: with where , and
if , then 1) and therefore whatever the ’s are for , or 2) and necessarily and for .
Therefore, we obtain also that
whenever , and
if where is a three-dimensional ellipsoid.
In addition, as a result, the -orbits of are subsets in the ellipsoids or .
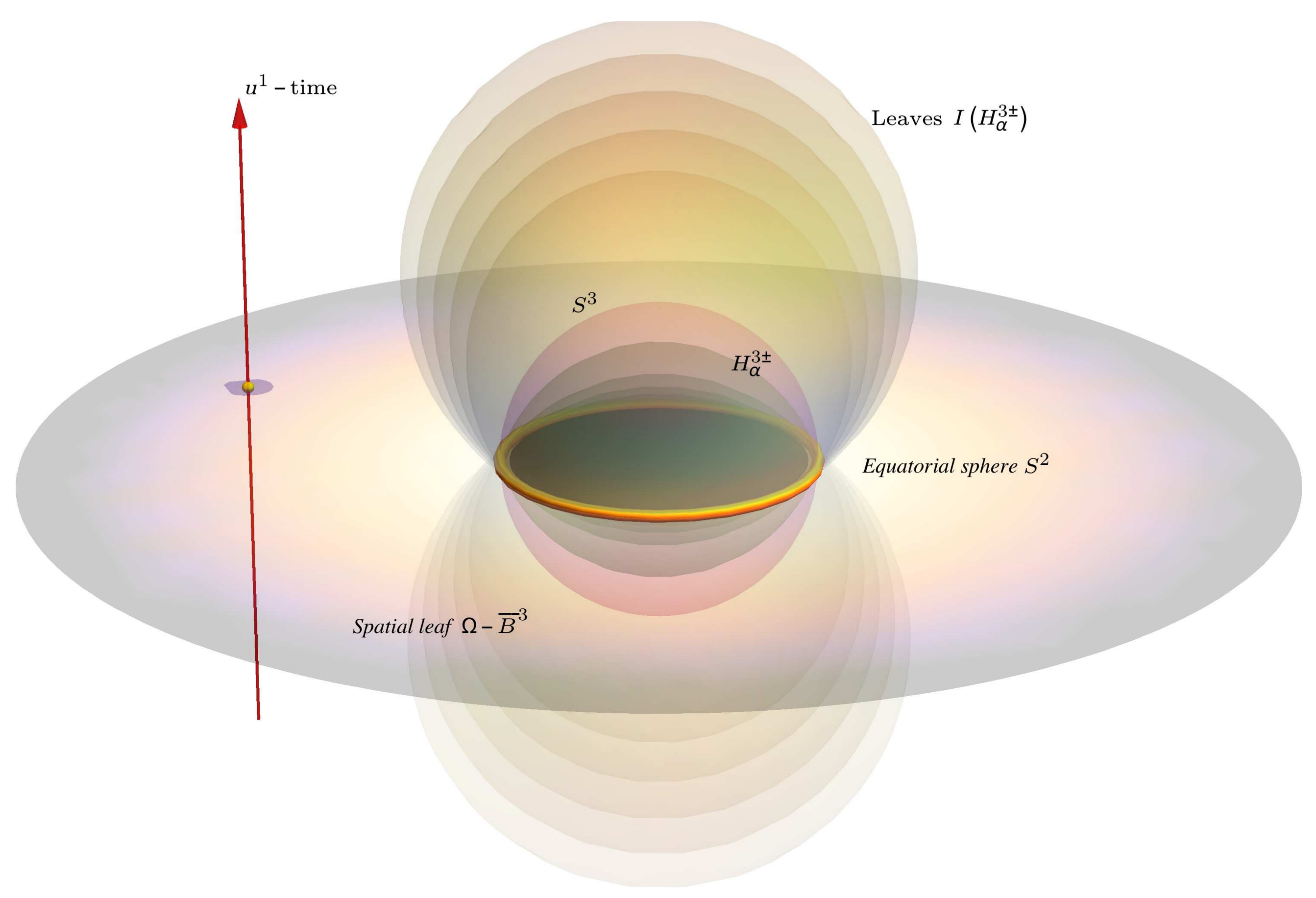
Note that a point is an element of an ellipsoid if and only if where is the open ball of points u such that . In addition, the equatorial sphere such that and is the common intersection in of ellipsoids .
Property 3. Let p be the function defined on Ω such that where . Then, we have for any and .
Proof. First, we can note that the definition domain of is . Then, from the definition of p and Property 1, we have . Moreover, we obtain from a direct computation with where . ☐
Remark 1. Then, from Property 3, we obtain if that .
Definition 4. We call σ-orbits in Ω the orbits of via σ and thus defined from the actions of elements .
Theorem 1. The π-orbits of in are the three-dimensional, disjoint, simply connected and connected sets , and where (resp. ) is the north (resp. south) hemisphere of , i.e., the set of points such that (resp. ). Note that is the limit case in of whenever α tends to infinity. Then, we denote by the leaf such that .
Proof. Let u be a point in . Then, because is a diffeomorphism between and there exists a unique point such that . From the algebraic definition of and the quadratic form Q we find that U is necessarily such that . Hence, the set of points where are elements of the hyperboloid defined by equation . However, acts transitively on this hyperboloid. Thus, acts transitively on any . It is the same for since it is the limit case whenever . ☐
Corollary 1. The σ-orbits of in Ω relative to the representation are the spacelike hyperplanes such that and . Moreover, we have on Ω for any and each is diffeomorphic to the leaf such that .
Proof. These assertions come simply from the fact that map is a diffeomorphism and from Theorem 1. ☐
Corollary 2. Let be the topological leaf space of π-orbits (leaves) in . Then, the leaf space is a Hausdorff space of which the leaves are not separated by closed neighborhoods on . Moreover, the π-foliation on is open, connected, transversally oriented (by ) and saturated in .
Proof. Indeed, we have
and
operates continuously on
via the representation
. Then, for the leaf space
to be Hausdorff, it is necessary and sufficient (8, I.52 Prop. 1, I.55 Prop. 8 [
16]) that the graph set
of the continuous action of
is closed in
, i.e., that each orbit
is closed; what they are on
. Now, these leaves
are neither open nor closed in
since any neighborhood (in the topology on
induced by that of
) in
of point
in the
equatorial 2-sphere intersects all the leaves
. Then the latter are not separated by closed neighborhoods in
. On the contrary, there would exist two closed neighborhoods
of
and
of
such that
and
are disjoint. However, all such closed neighborhoods contain the adherences
that intersect in
. ☐
Moreover, we have the following inversions:
the inversion between and is obtained by the -time inversion (where ),
the space inversion (where ) on each leaf , and
the inversion I in the 3-sphere that is the map where .
We can characterize more the matrices of the group . They must preserve the two quadratic forms Q and up to a same conformal factor. For this last reason, this implies that and are also preserved up to same conformal factors. Consequently, the spaces and are proper spaces and the matrices are then completely reducible. They are matrices such that whenever and . In addition, their first minors, obtained by deleting the second raws and second columns associated with the coordinate are elements of . Note that the group acts in two distinct ways on inhomogeneous coordinates: by homographies and as invariance subgroup of the quadratic forms Q and , and linearly as invariance group of the Lorentzian metric .
Furthermore, we restrict the group G to the subgroup of which the matrices have their coefficients and for vanishing. Hence, considering the restriction to of the action of , then restricts to the group . Moreover, is the group of (general) homologies preserving the origin e of the system of Riemann normal coordinates (note that all homologies leaving variable fixed points do not form a group). Then, the coset space is the sub-group of elations (special homologies) preserving the origin e to which corresponds the group of boosts analogous only to those in relativity.
Definition 5. We call “pseudo-hyperbolic space” the pseudo-Riemannian manifold Ω equipped with the Lorentzian metric .
We can note that this pseudo-Riemannian space is neither a anti-de Sitter space nor any of its projections on a particular projective space. In fact, we are in an unusual situation in which we have the Euclidean space on which is defined the metric which is the one used to define the non-simply connected anti-de Sitter space , but we are not using the pull-back which defines this space as a variety of dimension 4; namely the pull-back by a section like the section . In fact, we use the section resulting from the definition of hyperbolic space which is simply connected and advantageous from the topological point of view to return to the entire simply connected space specific to Riemann normal coordinates. The price to pay is a non-transitive action of invariance groups and the existence of a foliation on . This is a disadvantage from the point of view of group actions but this disadvantage could turn into an advantage in physics as we will see later.
In other words, there is a kind of competition between the pseudo-Riemannian structure on one side and the projective structure on the other and, metaphorically, there is a kind of “peace agreement” along the leaves only.
In addition, we define the coefficients
such that
Thus, we obtain
where
. Then, in particular, we obtain from
its determinant and the
non-negative scalar curvature
such that
Hence, our approach differs from those usually considered in general relativity with anti-de Sitter spaces. Then, it suffices to restrict the group of homographies to the group compatible with the invariance of the Lorentzian metric on the -orbits of .
Finally, we give the following definition of a projective geometric object.
Definition 6. A geometric object, e.g., a tensor, is said projectively invariant if it is invariant with respect to on all σ-orbits of in . It is said to be partially projectively invariant if it is invariant with respect to a proper subgroup of .
In particular, a geometric object on the union of -orbits, can be non-continuous on but continuous only when restricted to any spacelike leaf , i.e., we consider the case where only the discrete topology on with respect to the -foliation remains.
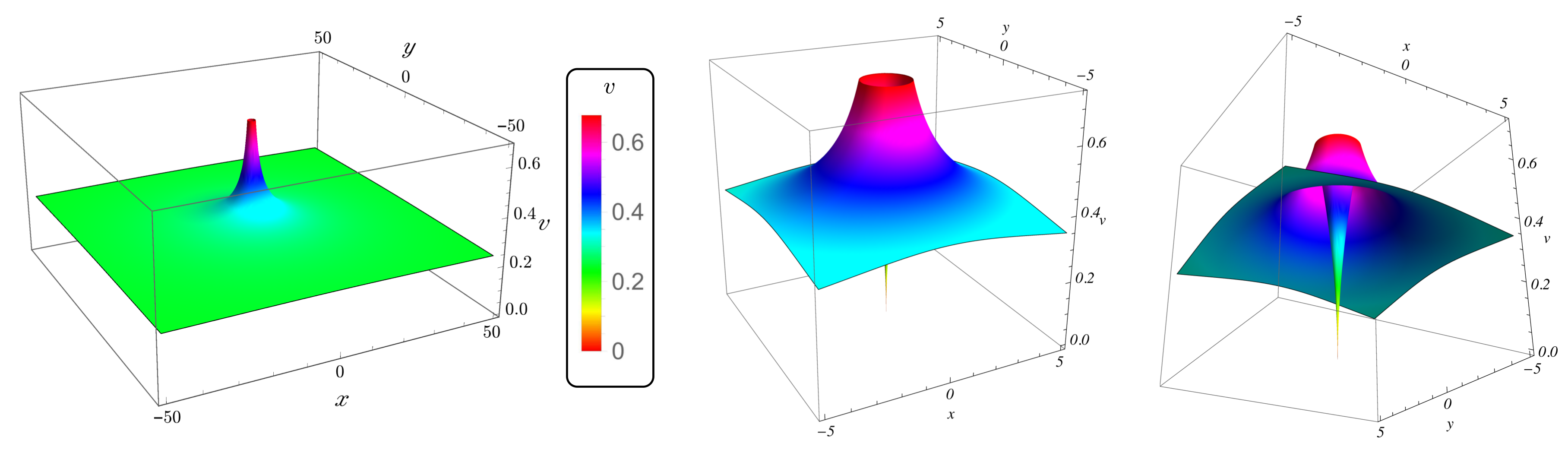
2.5. A Particular Discontinuous Projectively Invariant Lorentzian Metric
We have shown the map is a diffeomorphism and its inverse is defined by the relations . Then, the metric defined on is continuous and projectively invariant along each leaf with respect to the group with the representation . Indeed, from relation , we deduce that . However, is necessarily not continuous on the equatorial sphere because the leaves cannot be separated by closed neighborhoods on and, more specifically, on any neigbhourhood of the spacelike equatorial sphere . Then, considering the inversion I in the 3-sphere , we define on which is therefore no more continuous on but also projectively invariant along each leaf with respect to the group with again the representation . Besides, we can note that . Indeed, I commutes with , i.e., for all we have . Then, equipped with the metric on is a Lorentzian metric that diverges to infinity on ; which can be shown by a direct calculation using a symbolic calculation software (SCS). In addition, we find that is the Minkowski metric at , i.e., at the event e origin of the Riemann normal coordinates. We can say that is topologically singular on . Furthermore, we obtain a -foliation and a representation of which extend from to via inversion I.
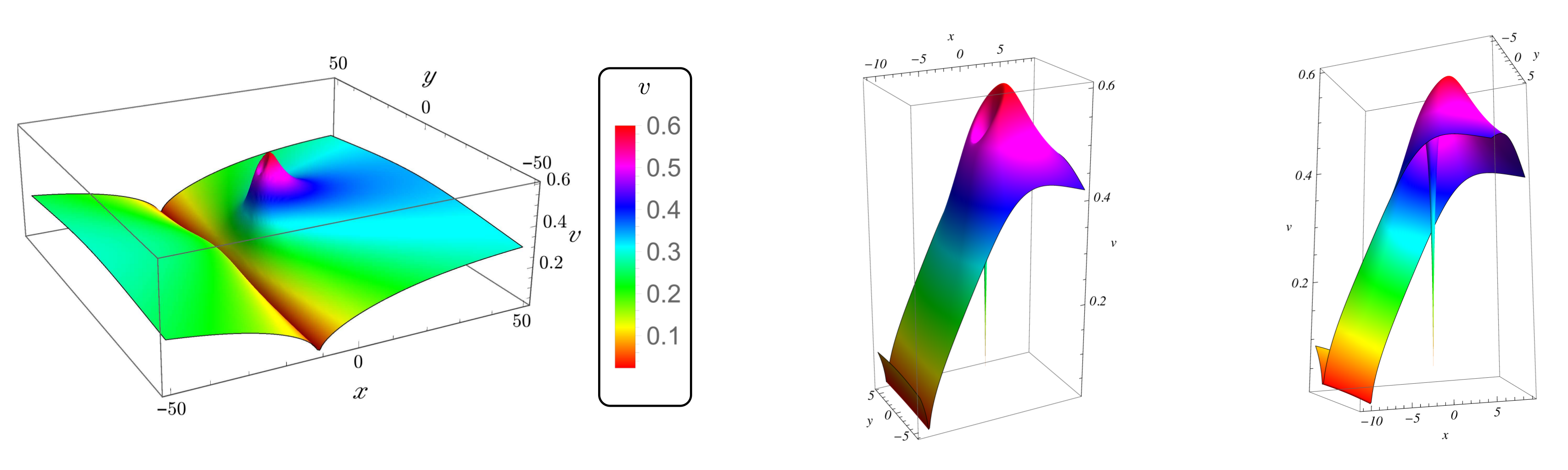
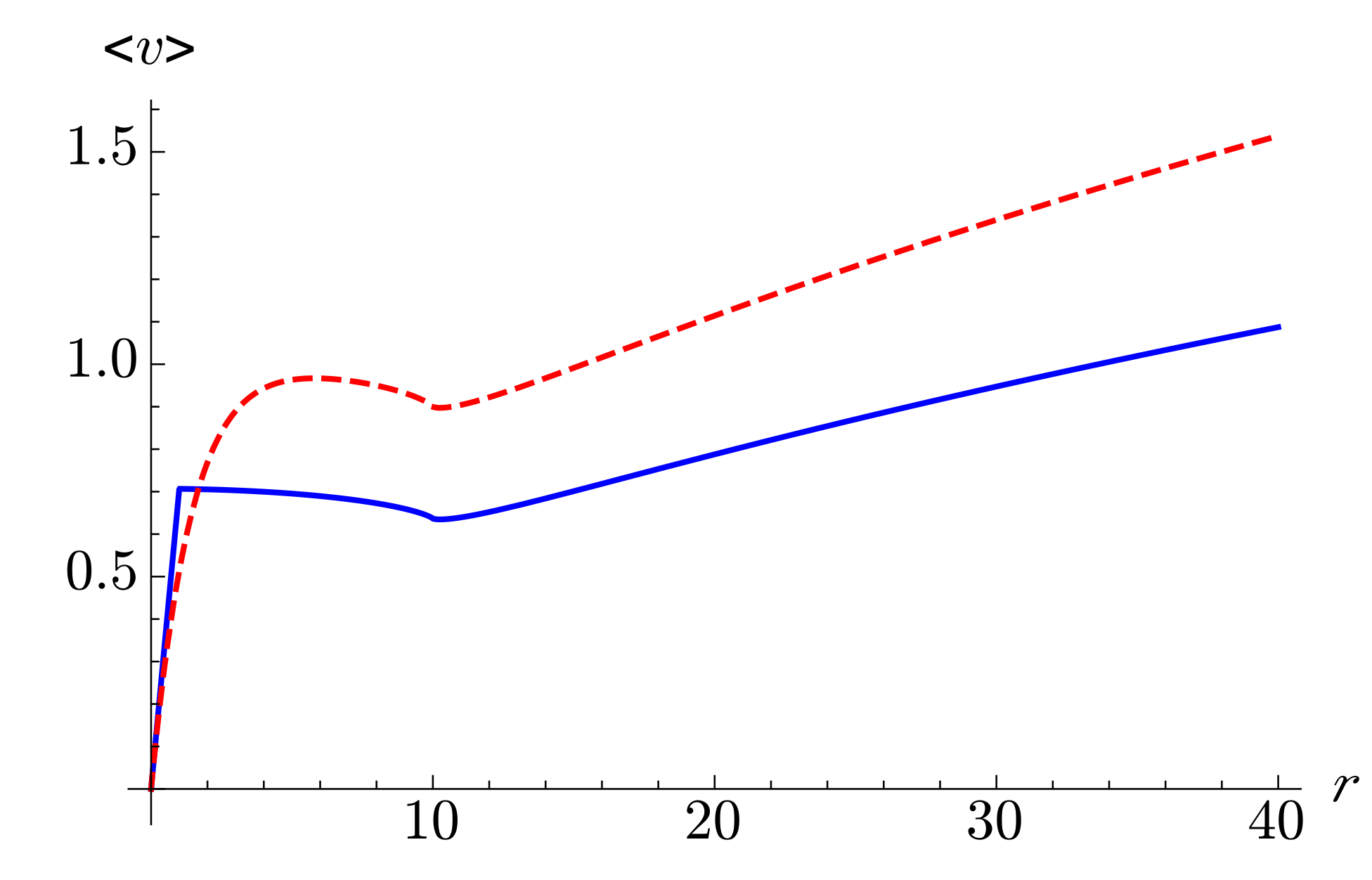
A natural way to get around this singularity problem on
is to consider a class of conformal metrics
defined from
and suitable functions
. The latter must be invariant with respect to
with representation
to preserve the
-foliation. Hence,
must be a function
of the fraction
from which the leaves were deduced. Besides, a direct computations using a SCS shows that the determinant of
and its scalar curvature
are such that
where
and
K is then such that
on
. In addition, the metric
is the Minkowski metric at
. Therefore, from the algebraic expression for
which is of the form
in the vicinity of
, to obtain a metric
with a finite determinant on
, then the function
must be such that
where
is a continuous function, bounded on
and such that
whenever
. Moreover, if
then
is the Minkowski metric at
. Unfortunately, the finiteness of
cannot be maintained if
and
, i.e., on the equatorial sphere
. Hence, the metric
is defined on
and we define
on
. Then, we define the following particular pseudo-Riemanniann manifold.
Definition 7. We call “singular pseudo-hyperbolic space” the pseudo-Riemannian manifold Ω equipped with the Lorentzian metric topologically singular on .
We then discuss in
Section 5 a possible relationship between this singular pseudo-hyperbolic space
and the admissible metrics in black hole theory.
In addition, we can say that the open ball is equipped with an orbifold structure by considering the finite group having inversion I as generator. Then, we have .


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











