Experimental and Numerical Analysis of the Dynamical Behavior of a Small Horizontal-Axis Wind Turbine under Unsteady Conditions: Part I




Abstract
1. Introduction
- the size of the devices should be small enough for the domestic exploitation, possibly in urban environments;
- the components and the materials should be cheap enough that the market price is affordable to very small-scale investors [2];
- the control system [3] should be simple and smart enough (hence, for example, commonly small HAWTs have fixed blade pitch) that users without technical expertise can manage the device;
2. Methods and Facilities
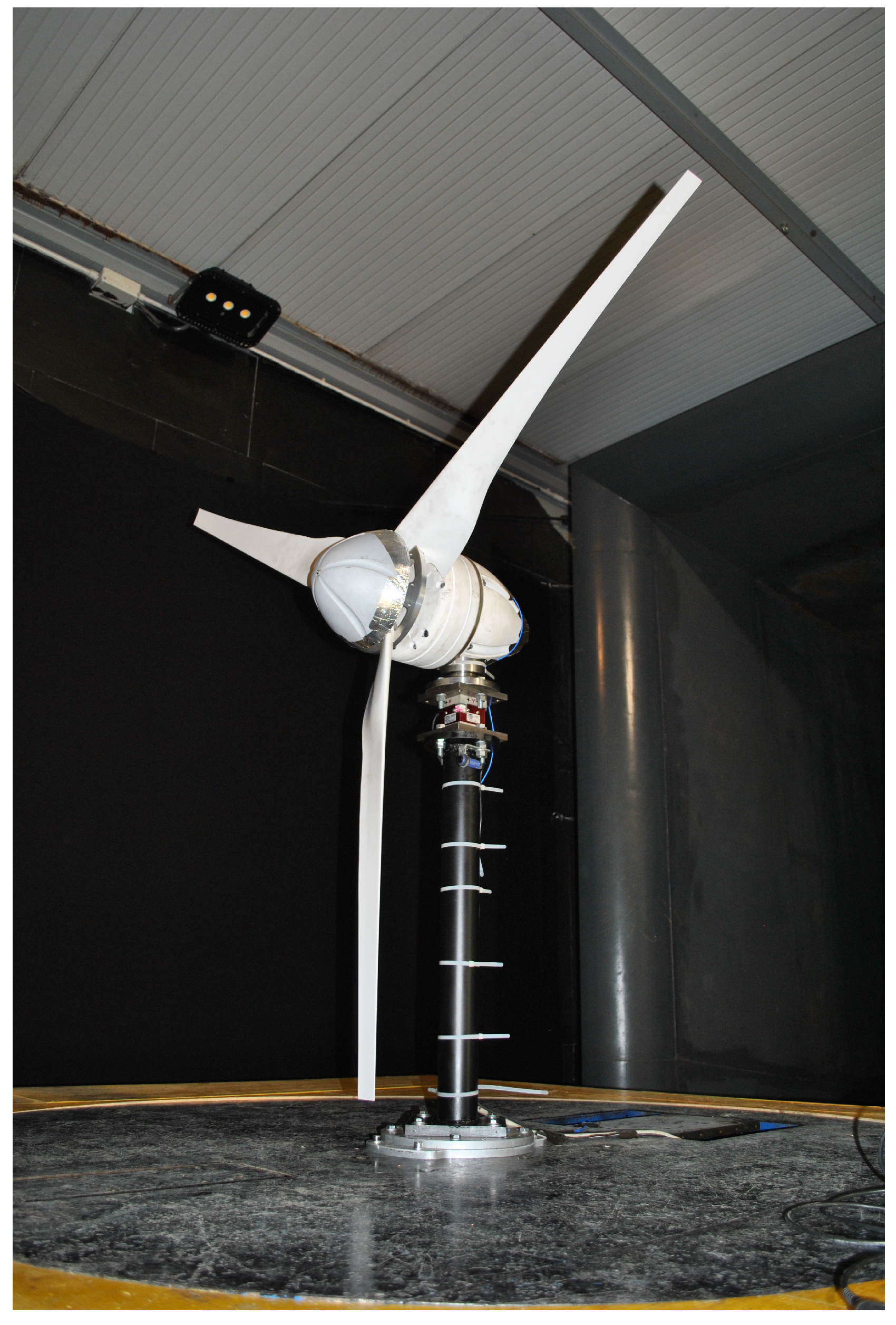
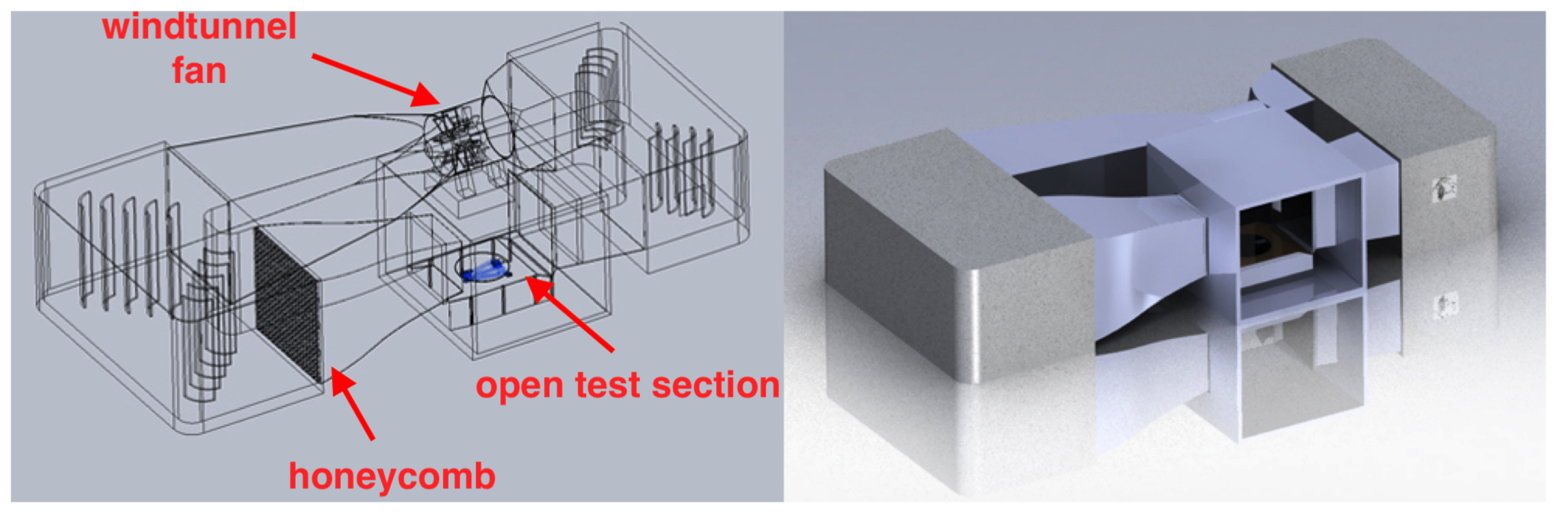
2.1. Experimental Set Up
- 3 kW of maximum power;
- 2 m of rotor diameter;
- 3 blades made of polymer reinforced with glass fibers;
- fixed pitch angle;
- rotor rotational speed between 200 and 700 revolutions per minute;
- 40 kg of overall nacelle mass;
- fully electric load control through a pulse width modulation on a resistive load (operated to follow the optimal rpm-power curve obtained from steady wind tests according to the Maximum Power Point Tracking).
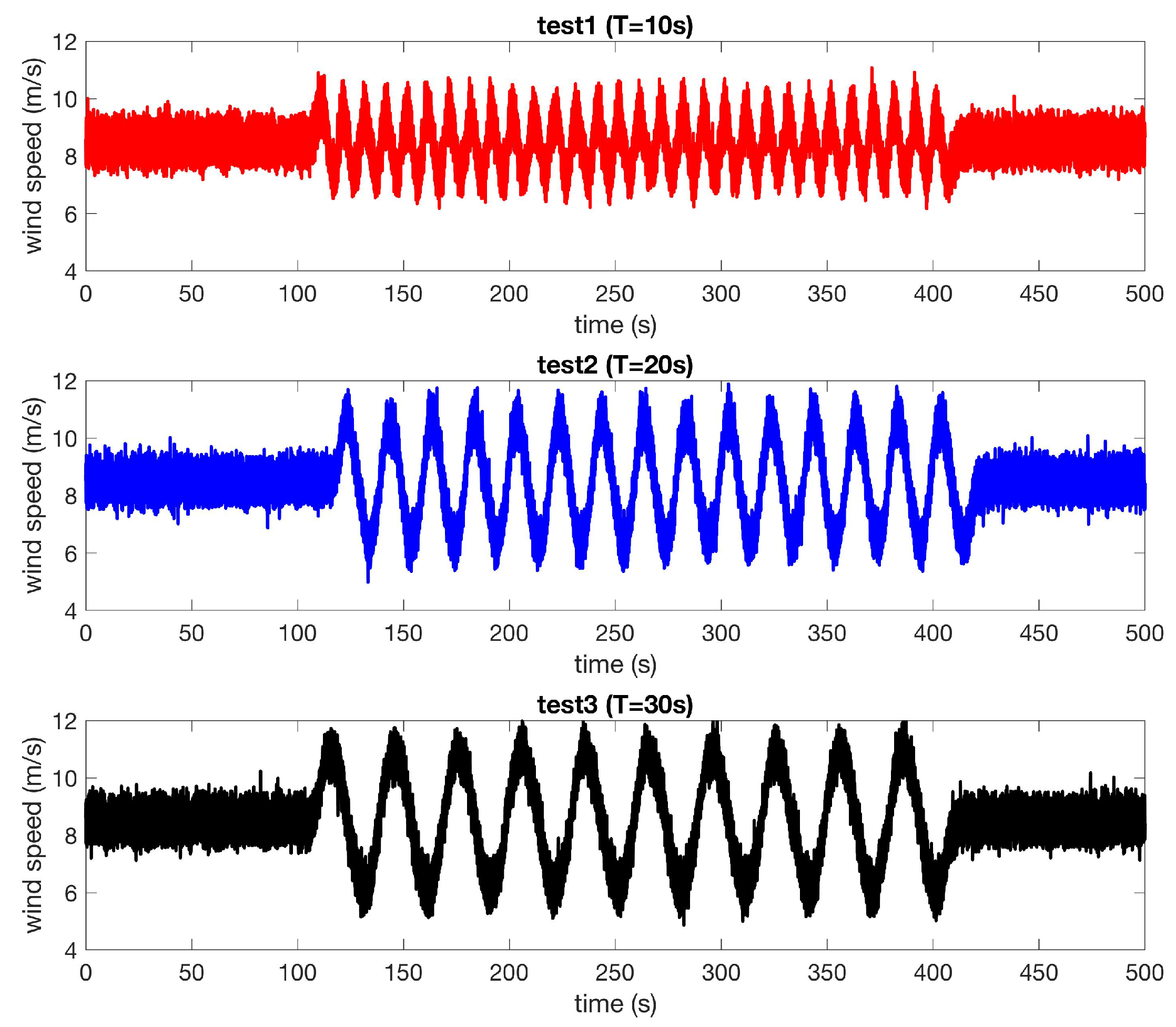
- 100 s of steady wind (approximately 8.5 m/s);
- 300 s of periodical wind with and amplitude of approximately 1.3 m/s and a variable period. Three periods T are tested: 10, 20 and 30 s (test 1, test 2, test 3);
- 100 s of steady wind (same steady conditions as at the beginning of the test).
- Wind speed (through an anemometer and a pitot);
- Rotor speed (through an optical tacho and a wind interface);
- Power output.
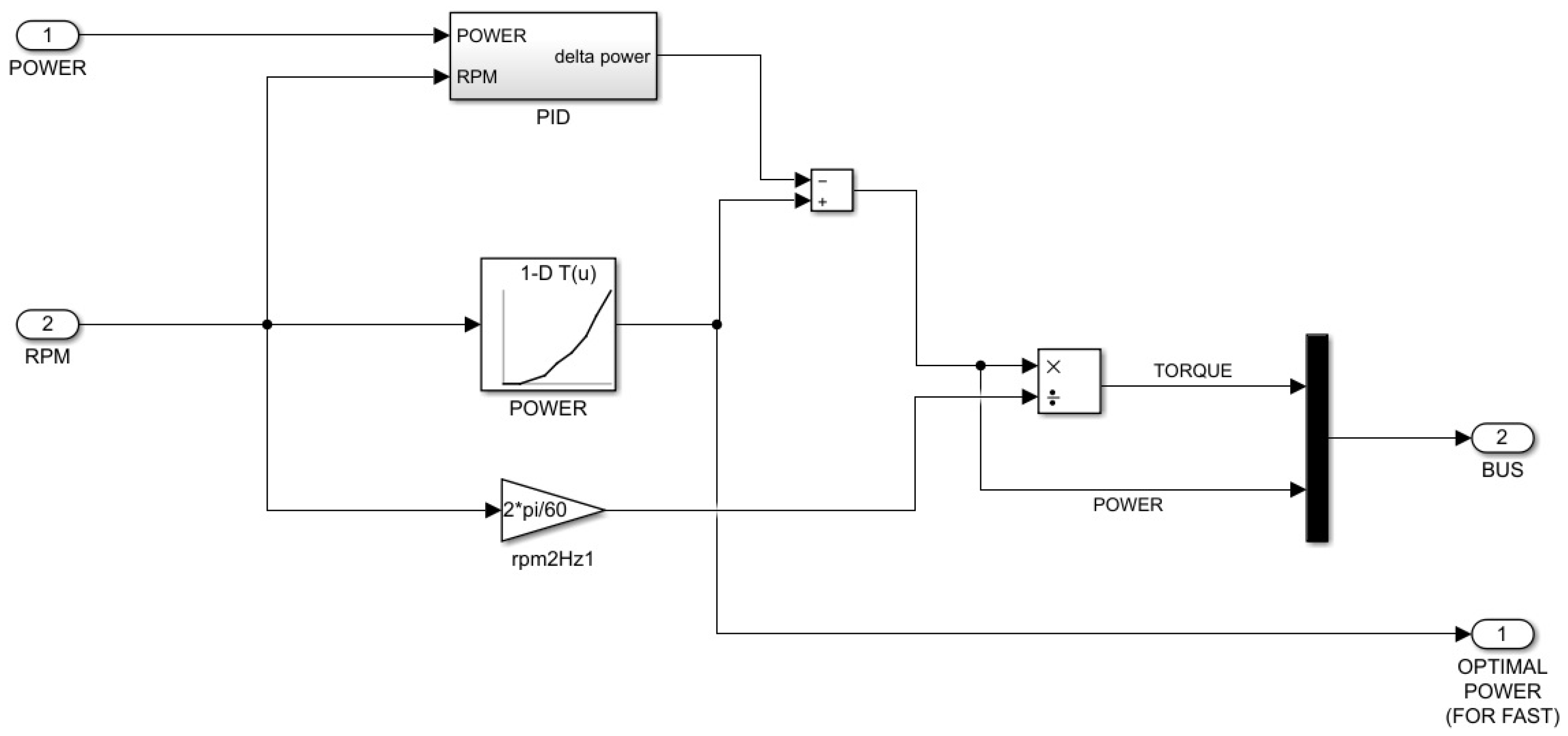
2.2. Numerical Model
- the numerical model needs to be fed by the undisturbed wind speed history. To achieve this task, the mean and the amplitude of the sinusoidal wind was corrected according to the blockage of the tunnel, but the problem is to manage the time-shift;
- the time response of the electrical interface. The easiest way to arrange an automatic load control has been employed, but also the model of the actual brake circuit should be included in the model.
3. Results
3.1. Experimental Tests Analysis
3.2. Simulations vs. Experiments
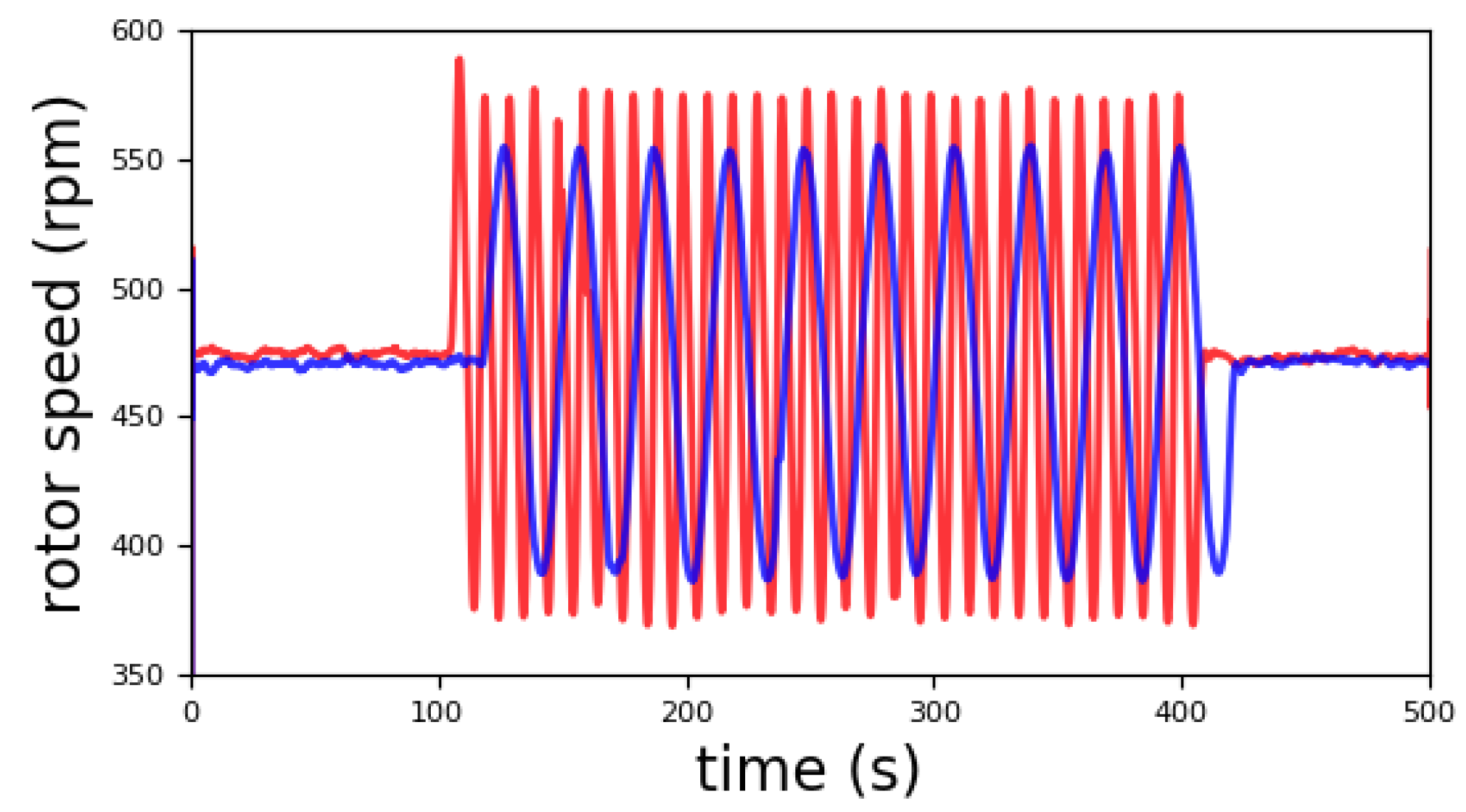
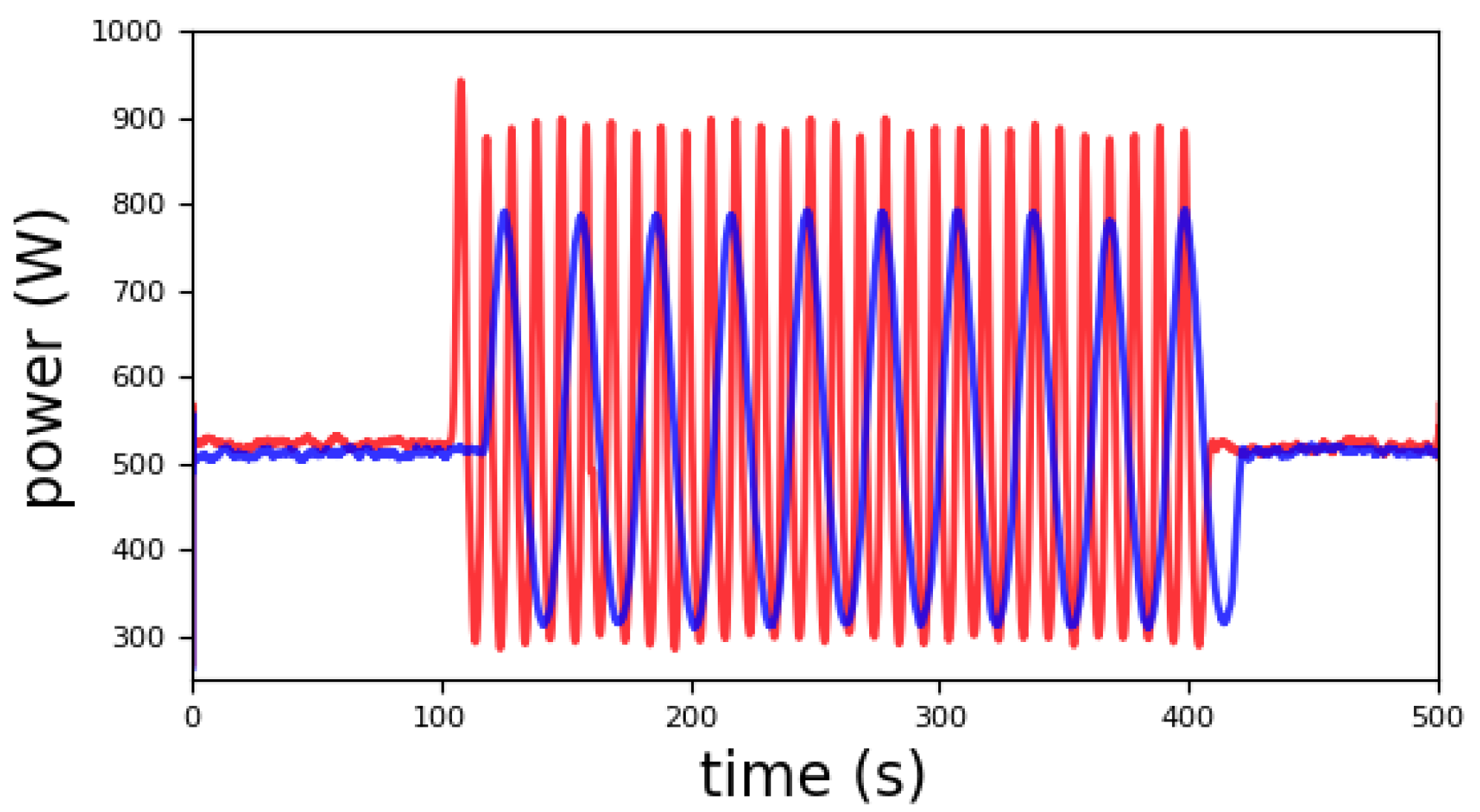
- in the numerical model, the rotor speed and the power are synchronized (ideal perfect control).;
- in the experimental measurements, there is a positive shift of a few percent of the period;
- this is mainly due to some effects of the electrical circuit (that was not simulated numerically) and of the aerodynamic damping that is not correctly reproduced by the model (as supported by the different behavior of test 4 with respect to the other tests; see Table 5).
- the boundary conditions represented by the presence of the walls of the wind tunnel produce a flow that is not perfectly uniform, differently from what is modeled through the FAST code.
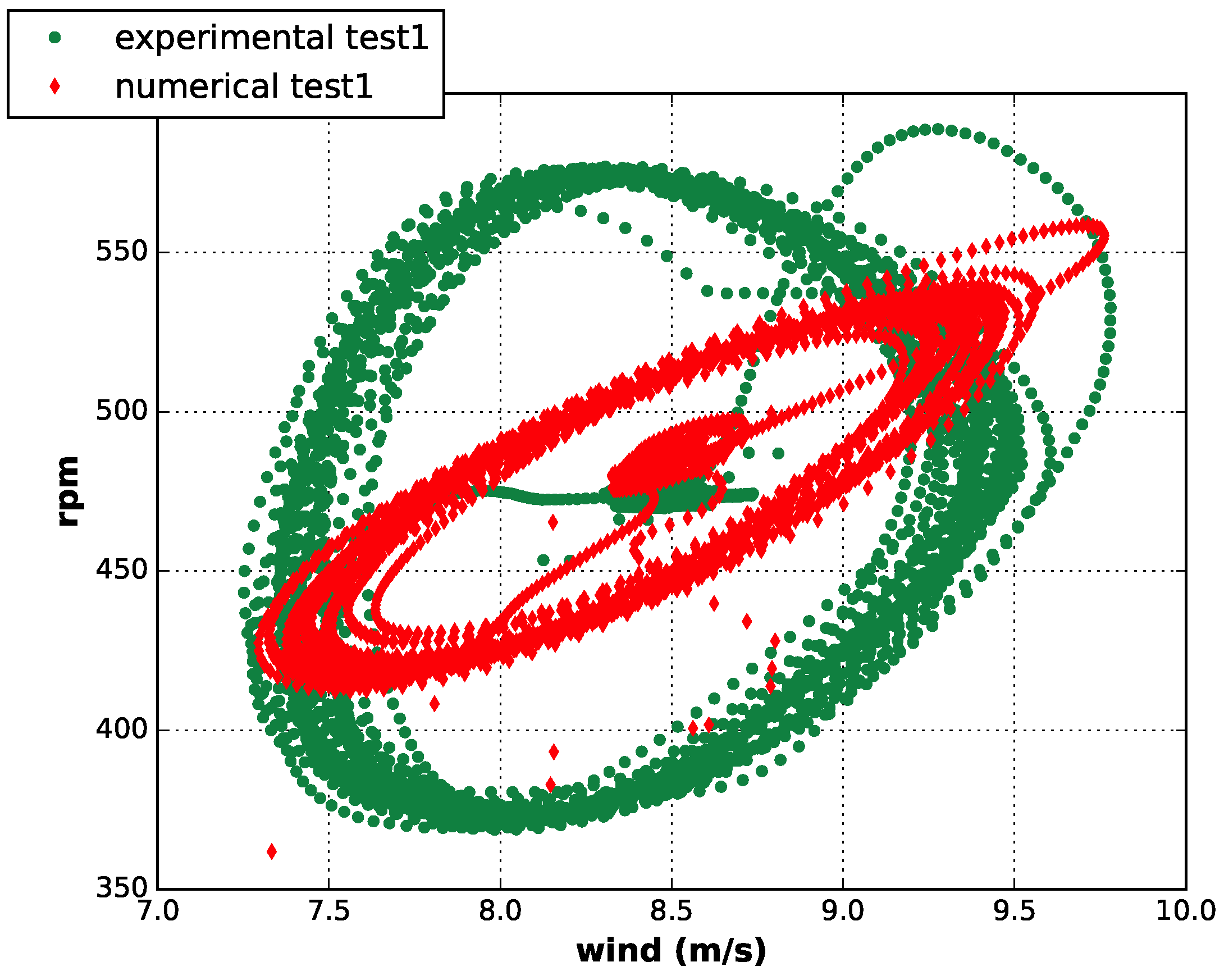
- the power vs. rotor speed plot demonstrates that the numerical model is able to reproduce only very slow turbulent wind (similar to that of test 3 with an overall period of 30 s) in a reliable way and that a further development of the model is necessary to reproduce the real HAWT dynamics;
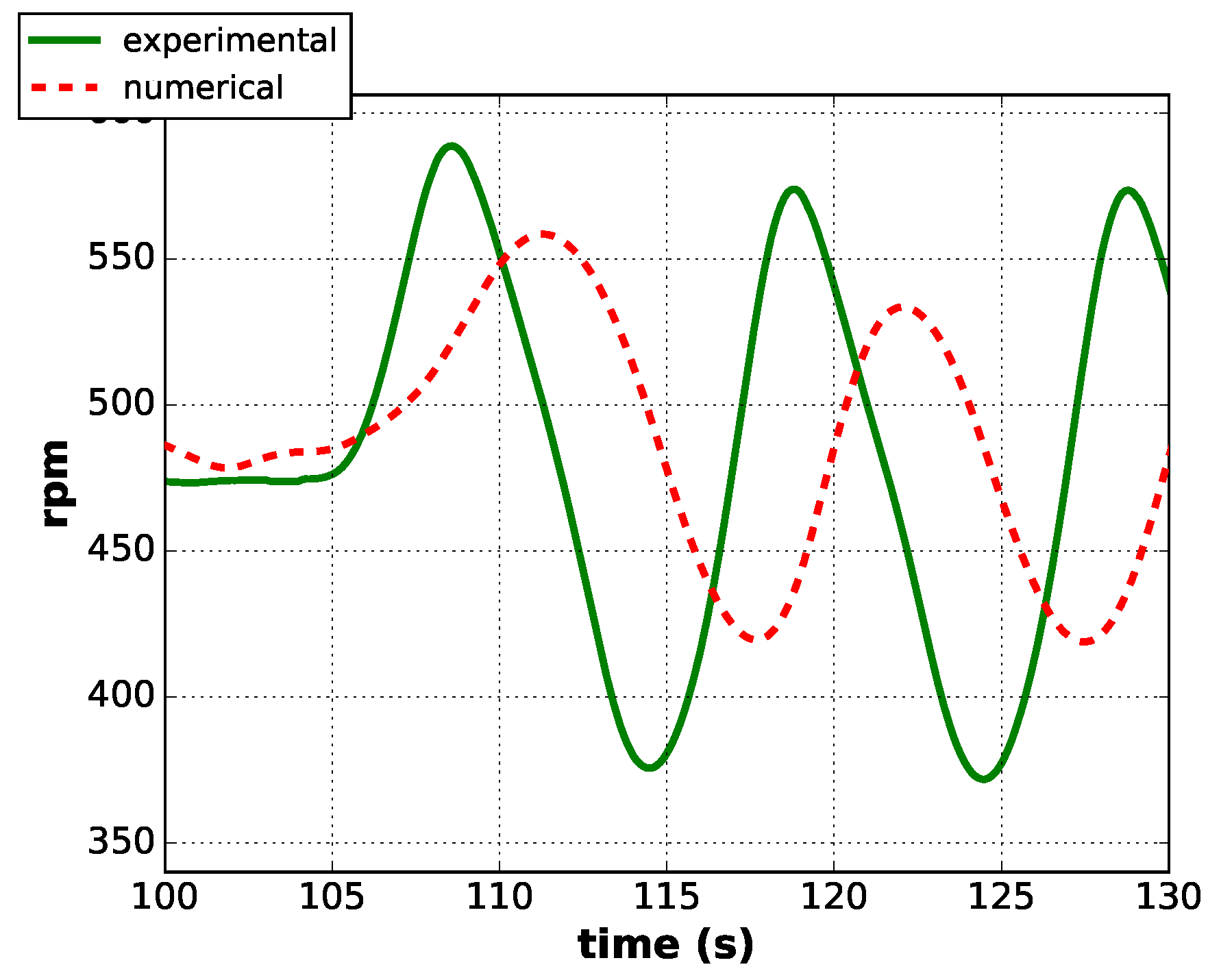
- from the 3D-plot, it can be observed that the actual configuration of the model is able to correctly predict the initial overshoot in the transition between the steady wind condition and the sinusoidal regime for test 3 (which is characterized by the shortest periodicity); instead this is not visible for the tests having a longer period;
- these results support that the fastest transition investigated in the present work is mainly governed by the aerodynamic and mechanical parameters that are already correctly included in the current version of the numerical model.
4. Conclusions
- the open test chamber can act as a sort of reservoir and store part of the air flow when the rotor thrust is suddenly rising;
- the effect of the pressure gradients can induce some small changes in volume/density on the large volume of air in the tunnel loop.
- extending the campaign to other prototypes of HAWT;
- measuring the mechanical loads of the HAWT;
- studying experimentally and numerically the dynamics of small HAWTs under yawed conditions.
Author Contributions
Funding
Conflicts of Interest
References
- Tummala, A.; Velamati, R.K.; Sinha, D.K.; Indraja, V.; Krishna, V.H. A review on small scale wind turbines. Renew. Sustain. Energy Rev. 2016, 56, 1351–1371. [Google Scholar] [CrossRef]
- Scappatici, L.; Bartolini, N.; Castellani, F.; Astolfi, D.; Garinei, A.; Pennicchi, M. Optimizing the design of horizontal-axis small wind turbines: From the laboratory to market. J. Wind Eng. Ind. Aerodyn. 2016, 154, 58–68. [Google Scholar] [CrossRef]
- Lanzafame, R.; Messina, M. Power curve control in micro wind turbine design. Energy 2010, 35, 556–561. [Google Scholar] [CrossRef]
- Joosse, P.; Blanch, M.; Dutton, A.; Kouroussis, D.; Philippidis, T.; Vionis, P. Acoustic emission monitoring of small wind turbine blades. J. Sol. Energy Eng. 2002, 124, 446–454. [Google Scholar] [CrossRef]
- Mollasalehi, E.; Sun, Q.; Wood, D. Contribution of small wind turbine structural vibration to noise emission. Energies 2013, 6, 3669–3691. [Google Scholar] [CrossRef]
- Lee, S.; Lee, S. Numerical and experimental study of aerodynamic noise by a small wind turbine. Renew. Energy 2014, 65, 108–112. [Google Scholar] [CrossRef]
- Grieser, B.; Sunak, Y.; Madlener, R. Economics of small wind turbines in urban settings: An empirical investigation for Germany. Renew. Energy 2015, 78, 334–350. [Google Scholar] [CrossRef]
- James, P.; Sissons, M.; Bradford, J.; Myers, L.; Bahaj, A.; Anwar, A.; Green, S. Implications of the UK field trial of building mounted horizontal axis micro-wind turbines. Energy Policy 2010, 38, 6130–6144. [Google Scholar] [CrossRef]
- Sunderland, K.; Woolmington, T.; Blackledge, J.; Conlon, M. Small wind turbines in turbulent (urban) environments: A consideration of normal and Weibull distributions for power prediction. J. Wind Eng. Ind. Aerodyn. 2013, 121, 70–81. [Google Scholar] [CrossRef]
- Sang, L.Q.; Murata, J.; Morimoto, M.; Kamada, Y.; Maeda, T. Experimental investigation of load fluctuation on horizontal axis wind turbine for extreme wind direction change. J. Fluid Sci. Technol. 2017, 12, JFST0005. [Google Scholar] [CrossRef]
- Tabrizi, A.B.; Whale, J.; Lyons, T.; Urmee, T. Performance and safety of rooftop wind turbines: Use of CFD to gain insight into inflow conditions. Renew. Energy 2014, 67, 242–251. [Google Scholar] [CrossRef]
- Lubitz, W.D. Impact of ambient turbulence on performance of a small wind turbine. Renew. Energy 2014, 61, 69–73. [Google Scholar] [CrossRef]
- Pagnini, L.C.; Burlando, M.; Repetto, M.P. Experimental power curve of small-size wind turbines in turbulent urban environment. Appl. Energy 2015, 154, 112–121. [Google Scholar] [CrossRef]
- Battisti, L.; Benini, E.; Brighenti, A.; Dell’Anna, S.; Castelli, M.R. Small wind turbine effectiveness in the urban environment. Renew. Energy 2018, 129, 102–113. [Google Scholar] [CrossRef]
- Tang, C.; Soong, W.L.; Freere, P.; Pathmanathan, M.; Ertugrul, N. Dynamic wind turbine output power reduction under varying wind speed conditions due to inertia. Wind Energy 2013, 16, 561–573. [Google Scholar] [CrossRef]
- Alpman, E. Aerodynamic performance of small-scale horizontal axis wind turbines under two different extreme wind conditions. J. Therm. Eng. 2015, 1, 420–432. [Google Scholar] [CrossRef]
- Bradney, D.; Evans, S.; Da Costa, M.S.P.; Clausen, P. Comparison of computational modelling and field testing of a small wind turbine operating in unsteady flows. J. Phys. Conf. Ser. 2016, 753, 082029. [Google Scholar] [CrossRef]
- Castellani, F.; Astolfi, D.; Becchetti, M.; Berno, F.; Cianetti, F.; Cetrini, A. Experimental and Numerical Vibrational Analysis of a Horizontal-Axis Micro-Wind Turbine. Energies 2018, 11, 456. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Test 1 | Test 3 |
|---|---|---|
| (m/s) | 8.43 | 8.42 |
| RSD (%) | 6.8 | 7.7 |
| CF | 1.1571 | 1.1622 |
| Metric | Test 1 | Test 3 |
|---|---|---|
| (rpm) | 470 | 471 |
| RSD (%) | 11.4 | 9.7 |
| CF | 1.2430 | 1.1723 |
| Metric | Test 1 | Test 3 |
|---|---|---|
| (W) | 527 | 526 |
| RSD (%) | 30.0 | 25.0 |
| CF | 1.7163 | 1.4701 |
| Output Power (W) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Test 1 | Test 2 | Test 3 | |||||||
| RSD (%) | CF | RSD (%) | CF | RSD (%) | CF | ||||
| experimental | 527 | 30.0 | 1.7163 | 528 | 29.7 | 1.5107 | 526 | 25.0 | 1.4701 |
| numerical | 533 | 18.0 | 1.4792 | 537 | 25.0 | 1.4456 | 537 | 24.4 | 1.4885 |
| Rotor Speed (rpm) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Test 1 | Test 2 | Test 3 | Test 4 | |||||||||
| RSD (%) | CF | RSD (%) | CF | RSD (%) | CF | RSD (%) | CF | |||||
| experimental | 470 | 11.4 | 1.2430 | 472 | 11.6 | 1.1827 | 471 | 9.7 | 1.1723 | 386 | 19.2 | 1.2837 |
| numerical | 479 | 7.6 | 1.1605 | 477 | 10.5 | 1.1609 | 477 | 10.3 | 1.1720 | 461 | 13.4 | 1.2117 |
| Phase Shift (%) | ||||
|---|---|---|---|---|
| Test 1 | Test 2 | Test 3 | Test 4 | |
| experimental | 23 | 5 | −1 | −4 |
| numerical | −7 | −7 | −4 | −20 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castellani, F.; Astolfi, D.; Becchetti, M.; Berno, F. Experimental and Numerical Analysis of the Dynamical Behavior of a Small Horizontal-Axis Wind Turbine under Unsteady Conditions: Part I. Machines 2018, 6, 52. https://doi.org/10.3390/machines6040052
Castellani F, Astolfi D, Becchetti M, Berno F. Experimental and Numerical Analysis of the Dynamical Behavior of a Small Horizontal-Axis Wind Turbine under Unsteady Conditions: Part I. Machines. 2018; 6(4):52. https://doi.org/10.3390/machines6040052
Chicago/Turabian StyleCastellani, Francesco, Davide Astolfi, Matteo Becchetti, and Francesco Berno. 2018. "Experimental and Numerical Analysis of the Dynamical Behavior of a Small Horizontal-Axis Wind Turbine under Unsteady Conditions: Part I" Machines 6, no. 4: 52. https://doi.org/10.3390/machines6040052
APA StyleCastellani, F., Astolfi, D., Becchetti, M., & Berno, F. (2018). Experimental and Numerical Analysis of the Dynamical Behavior of a Small Horizontal-Axis Wind Turbine under Unsteady Conditions: Part I. Machines, 6(4), 52. https://doi.org/10.3390/machines6040052