
Design and Implementation of Hardware-in-the-Loop Simulation Environment Using System Identification Method for Independent Rear Wheel Steering System

Abstract
:1. Introduction
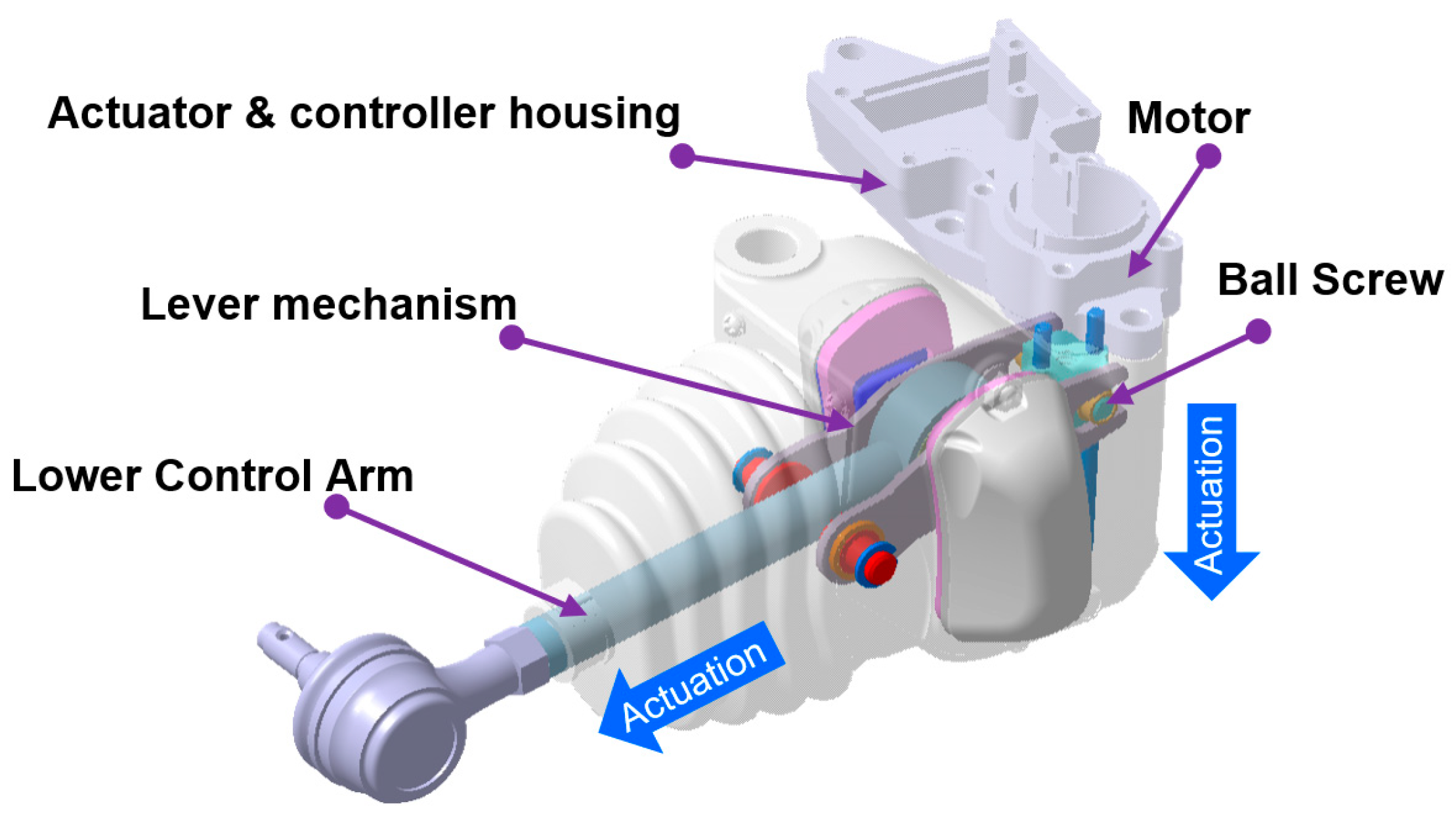
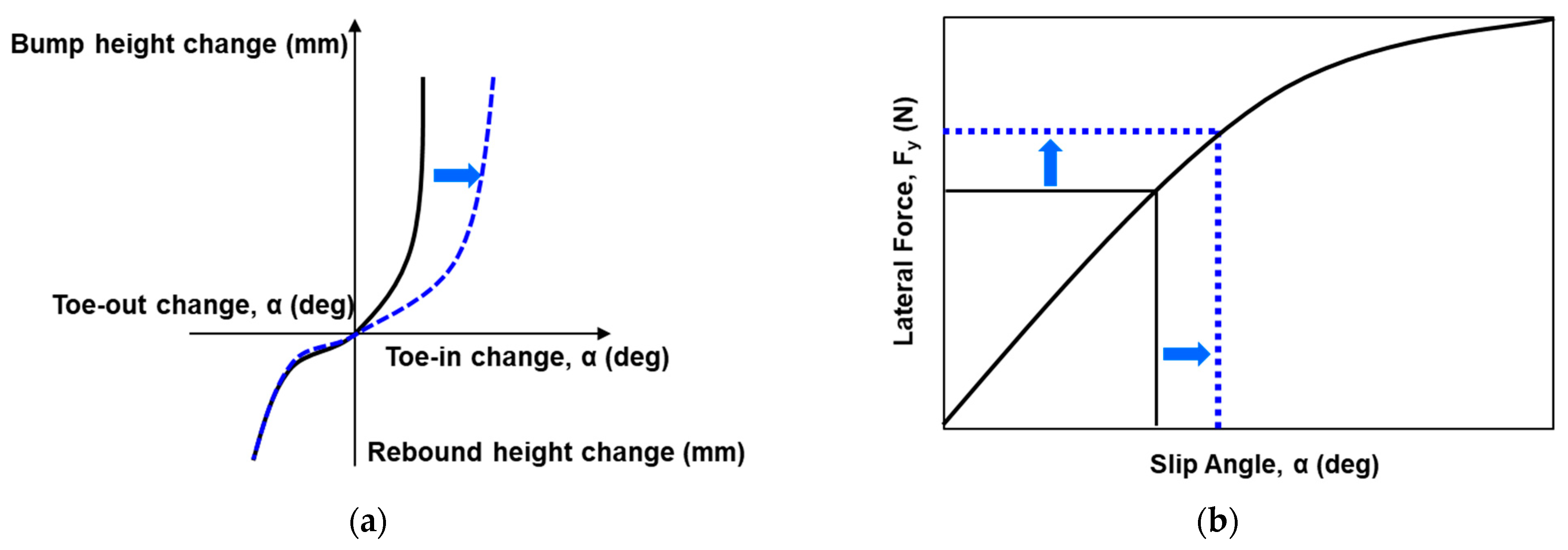
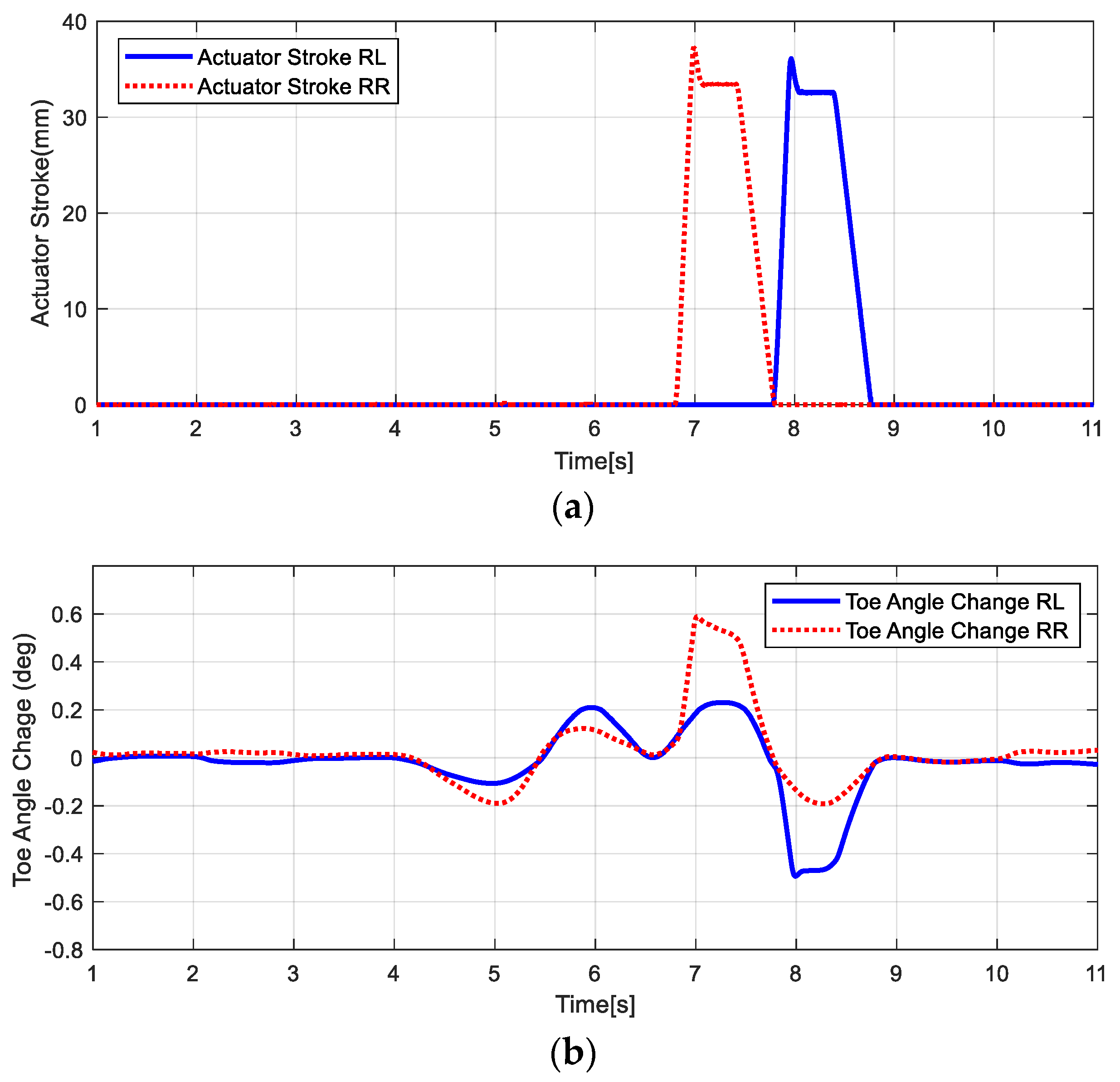
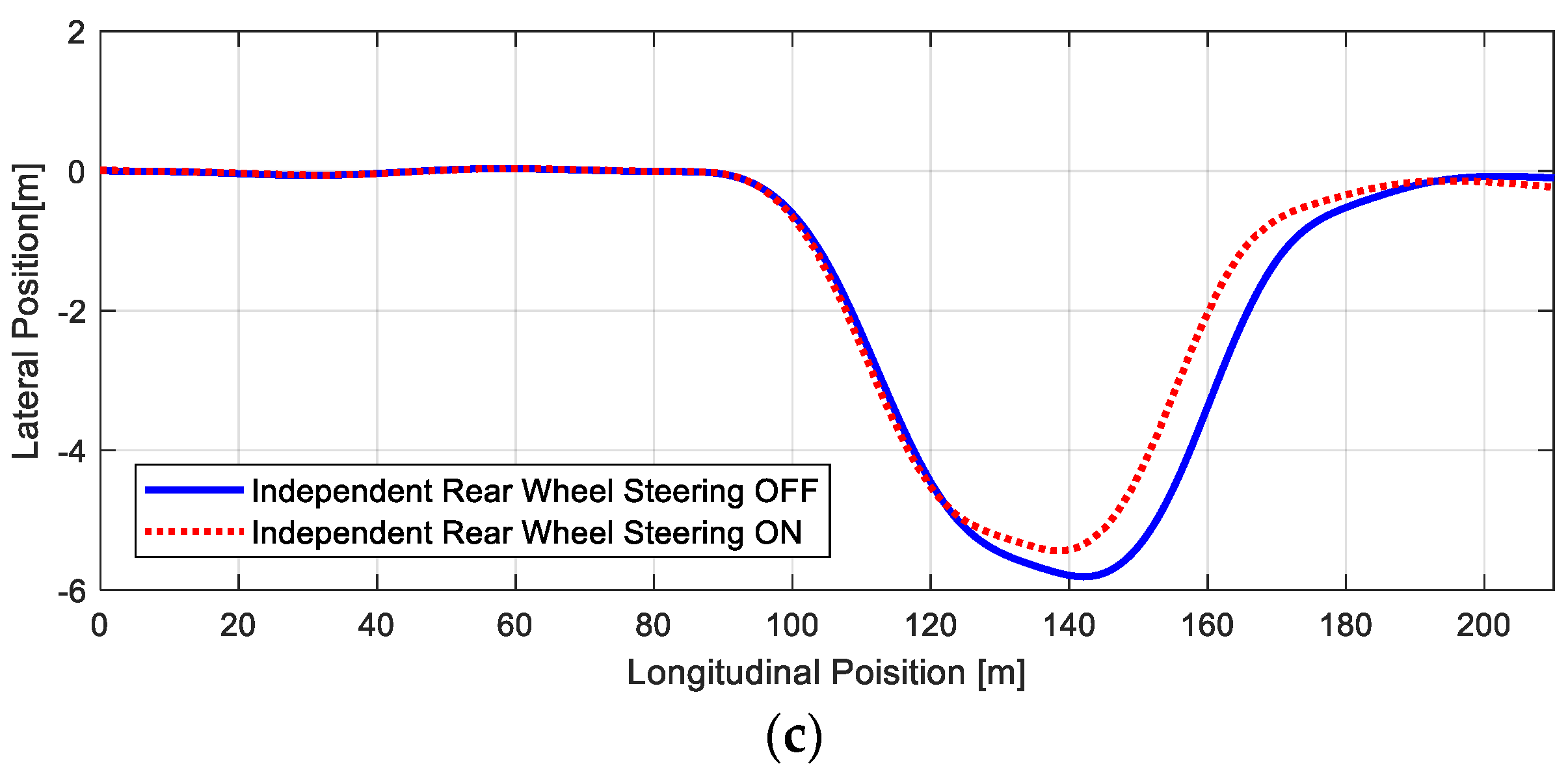
2. Independent Rear Wheel Steering System
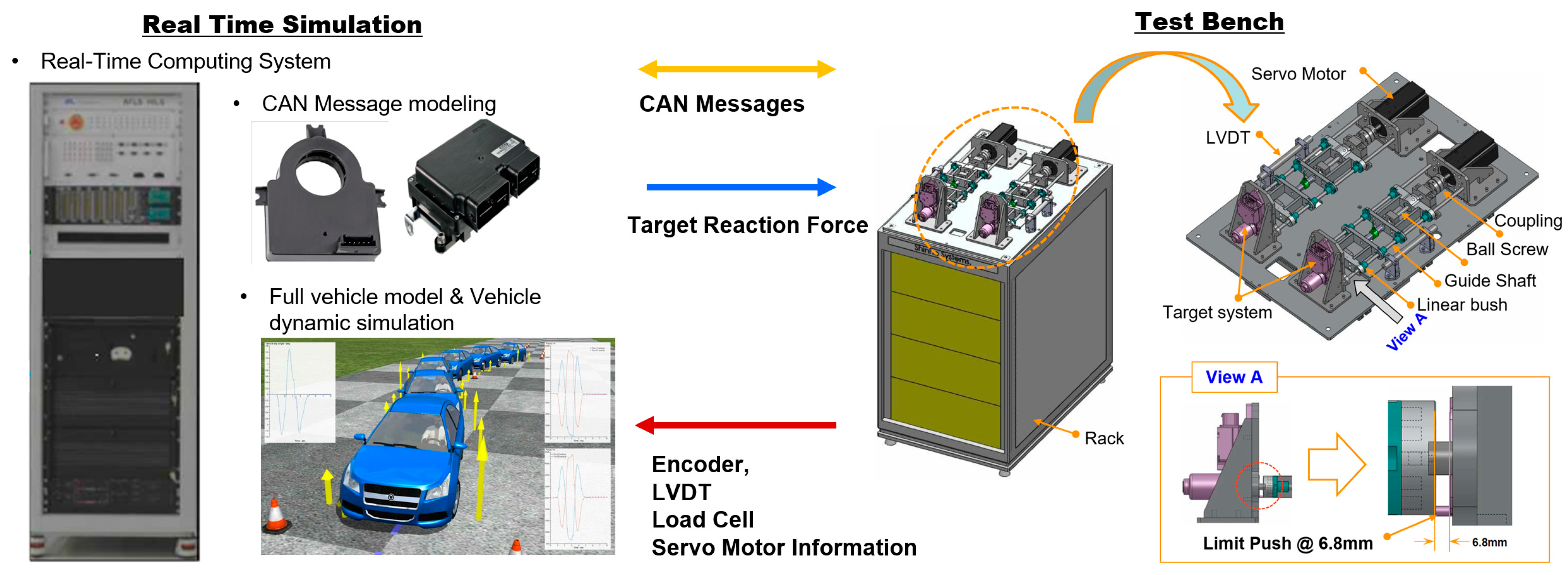
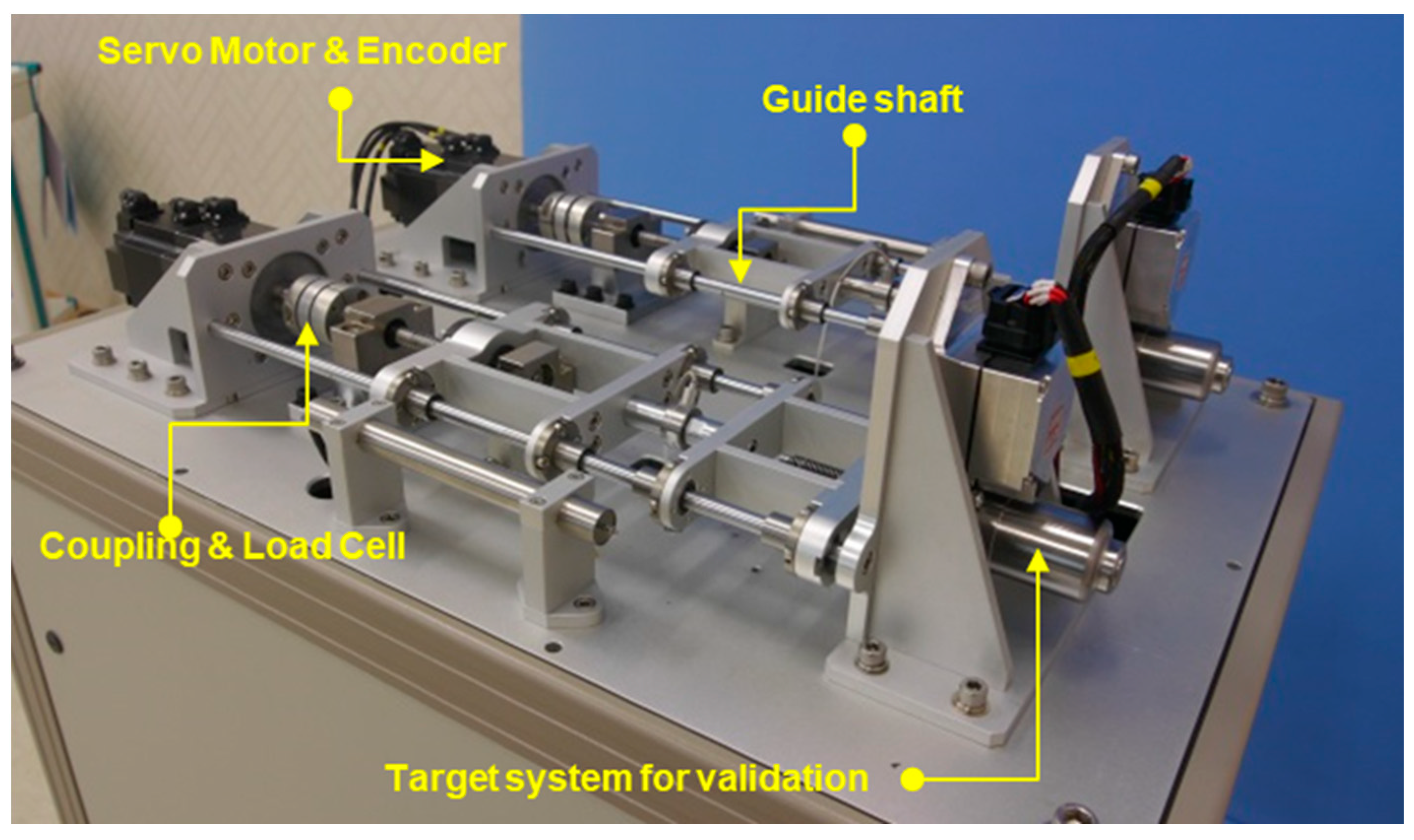
3. Design and Configuration of HILS System
3.1. Real-Time Simulation Environment and System Configuration
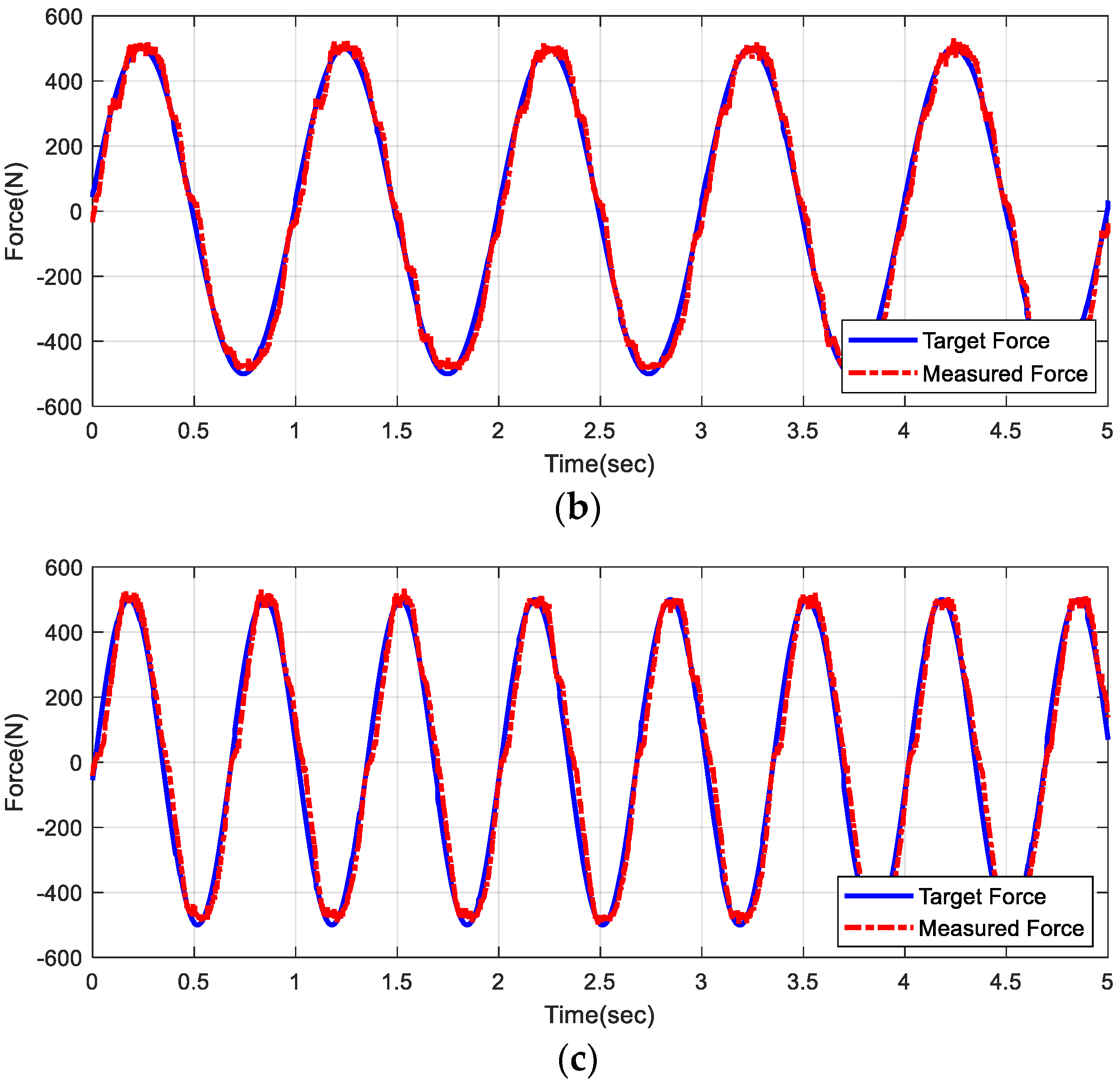
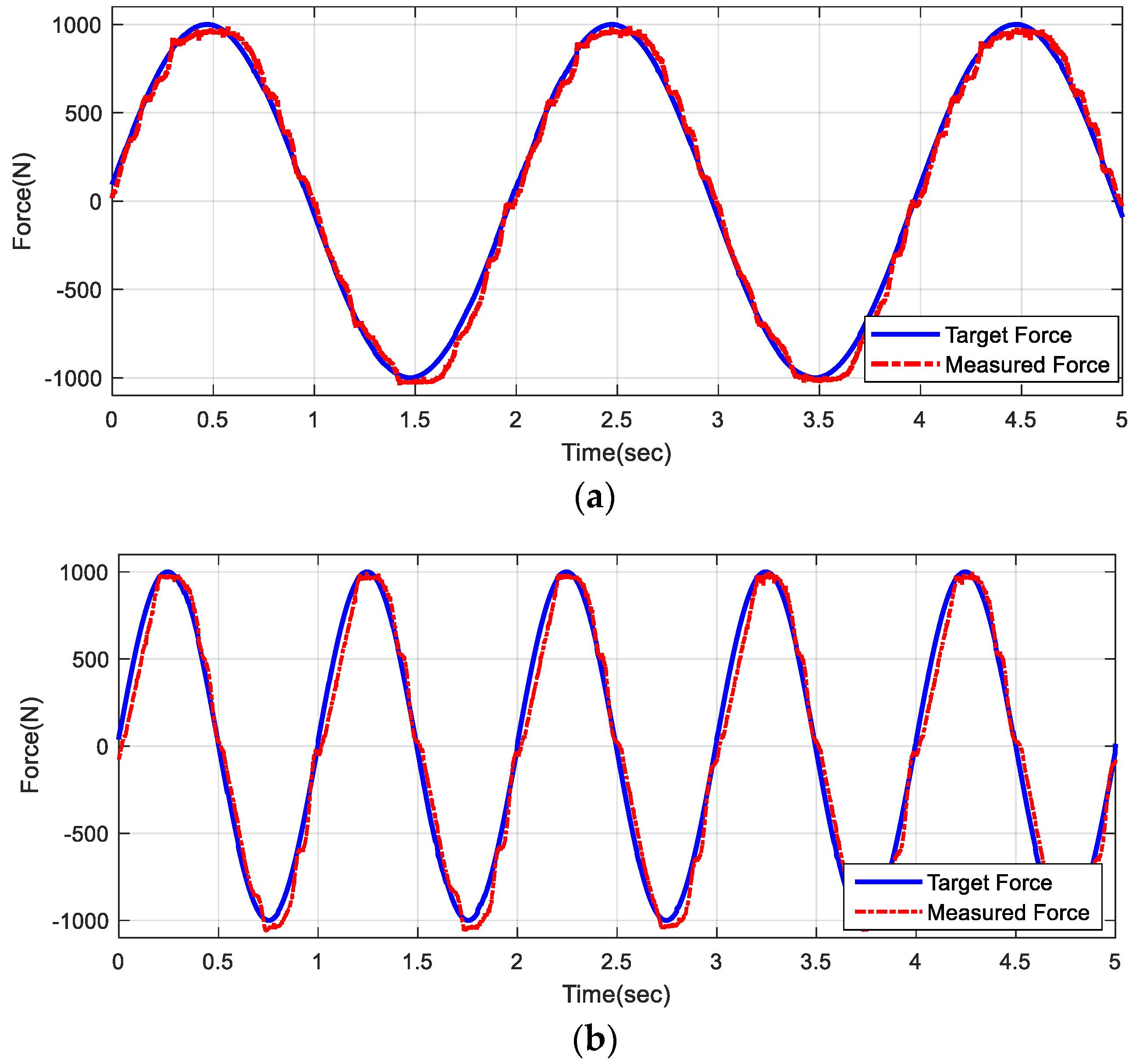
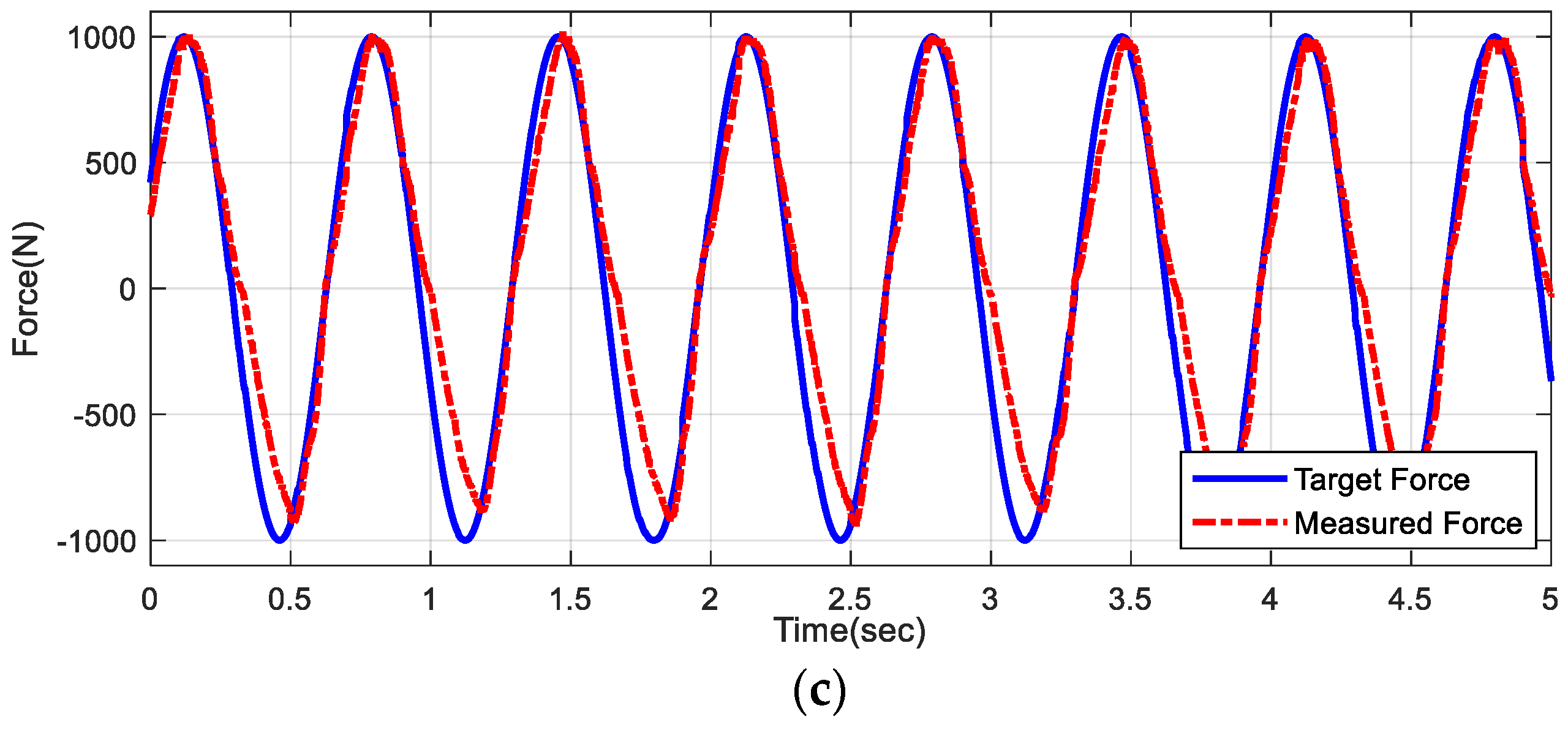
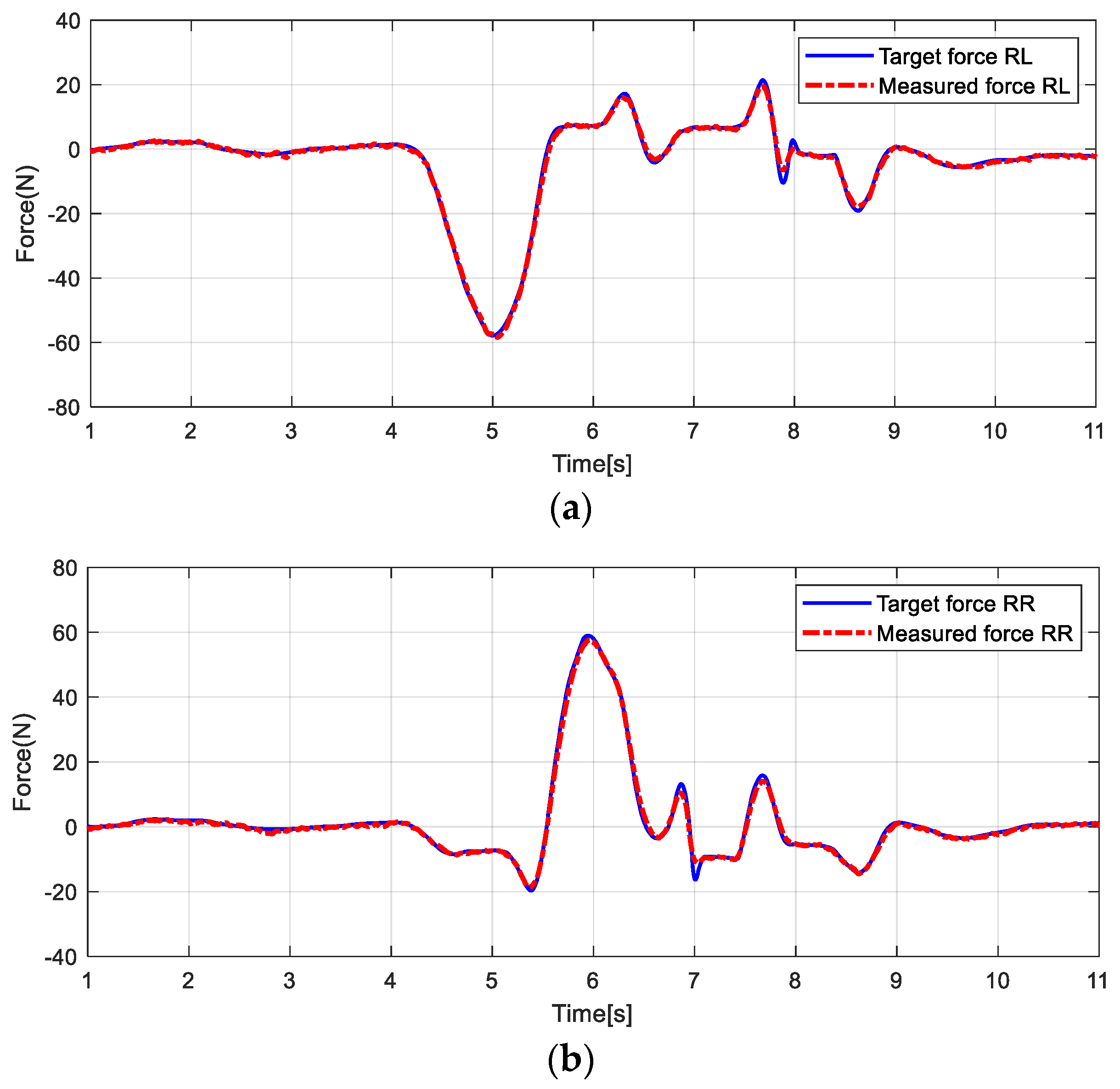
3.2. Reaction Force Generation and Control
4. Vehicle and System Modeling
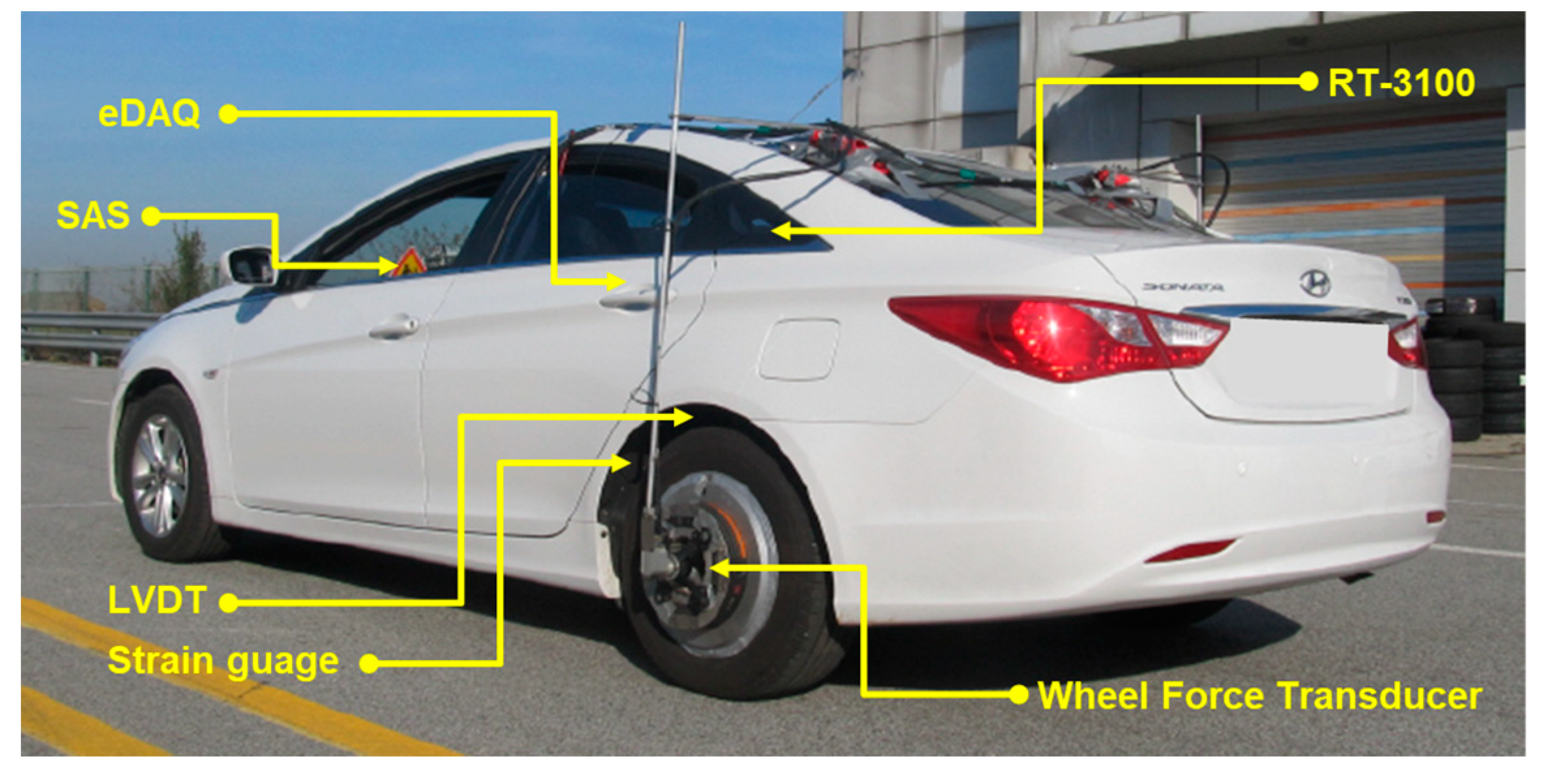
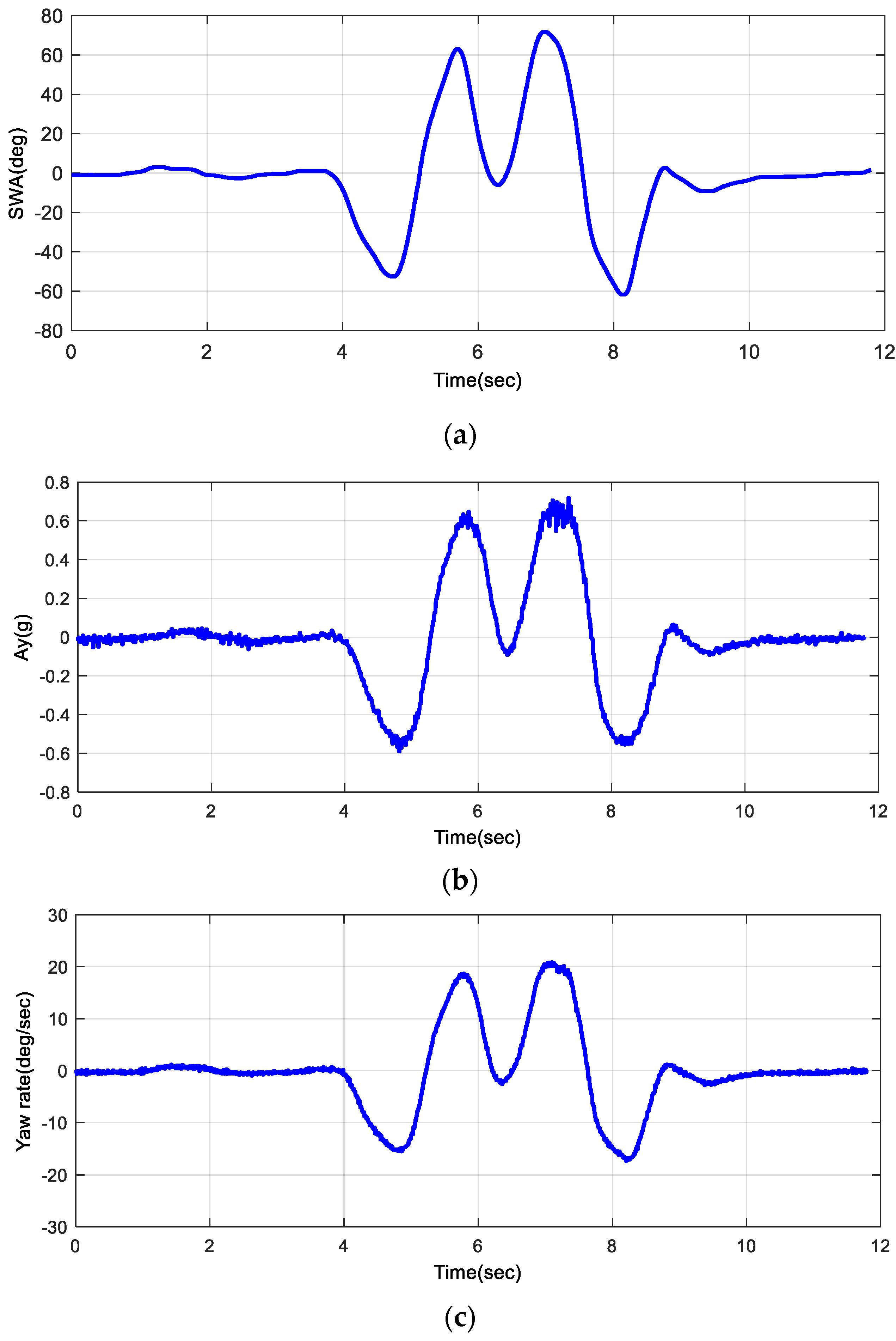
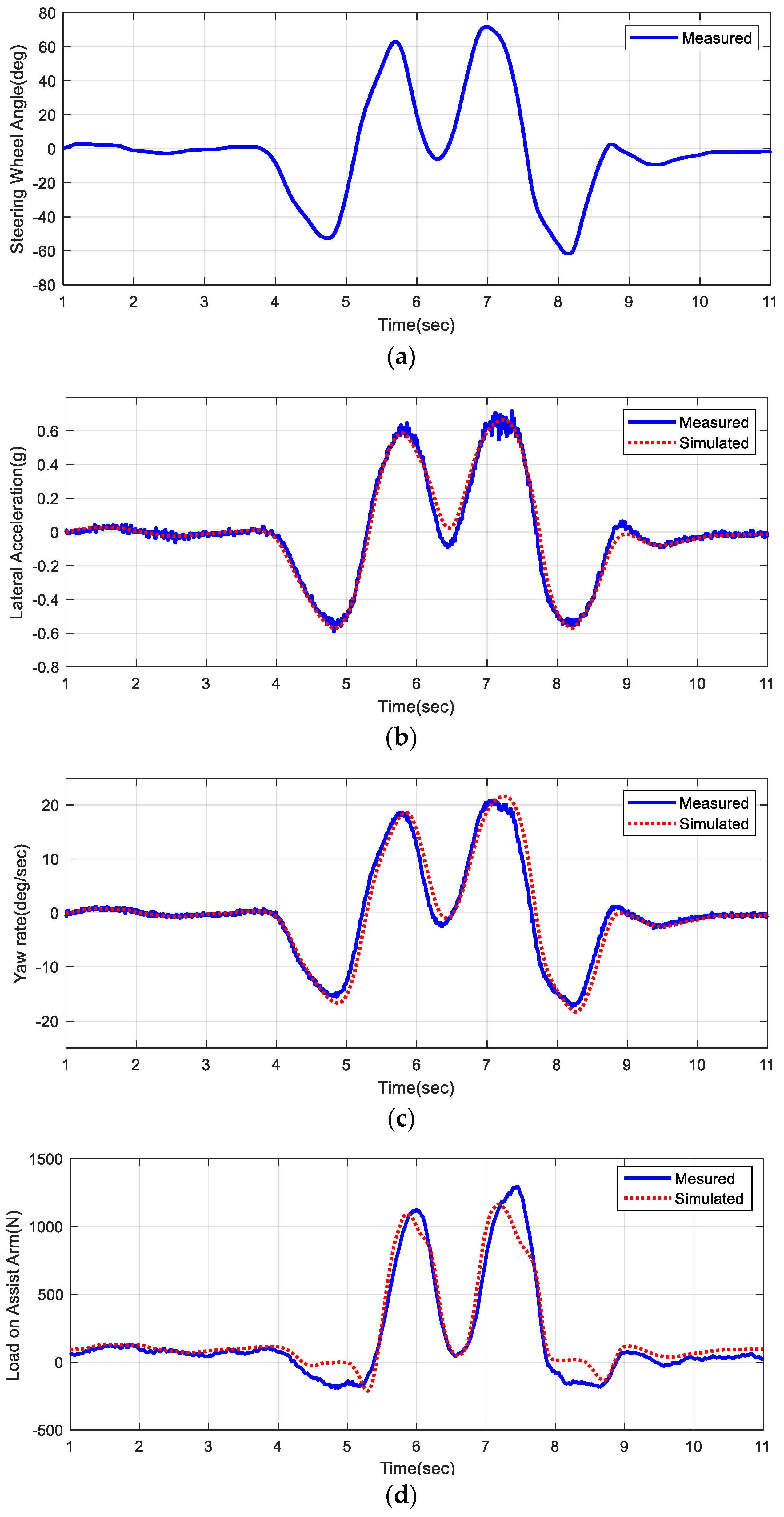
4.1. Data Acquisition for Modeling
4.2. Modeling of Reaction Force
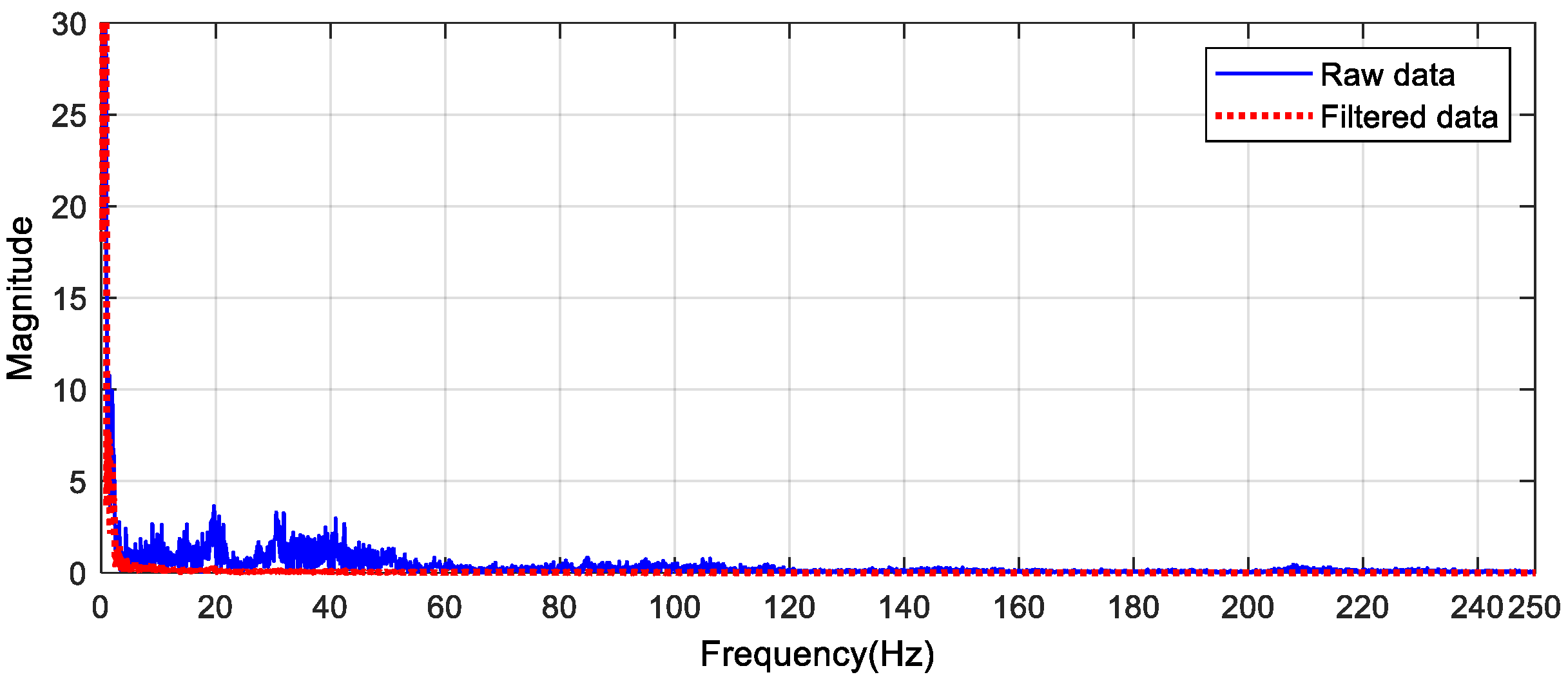
4.2.1. Signal Processing
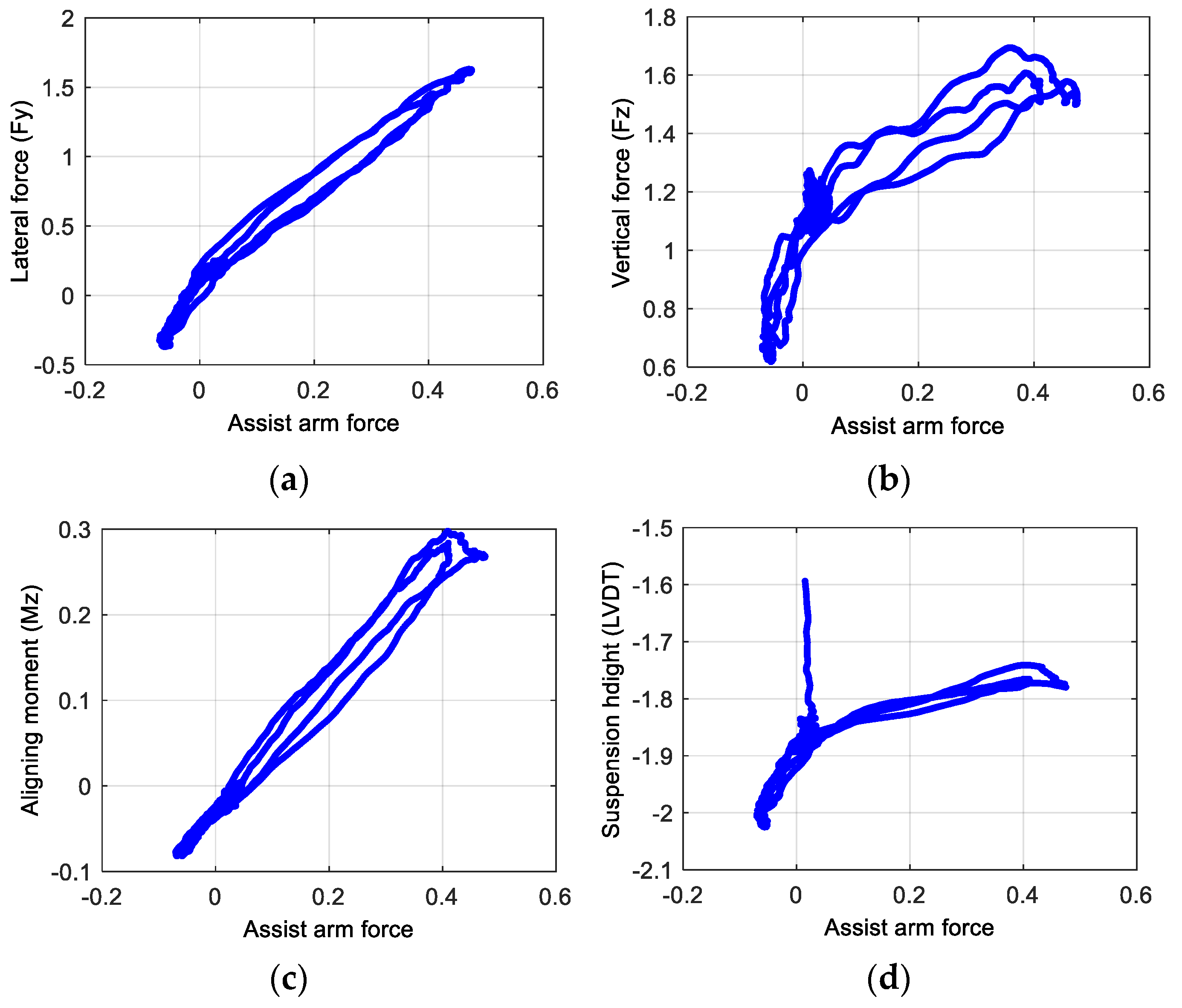
4.2.2. Correlation Analysis for Identifying Input Variable
4.2.3. Modeling of Reaction Force
4.2.4. Force Attenuation Mechanism
4.3. Modeling of Target Vehicle
5. Test Results of Target System Using HiL Simulation
6. Discussion and Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, H.; Liu, W.; Chen, L.; Yu, F. An adaptive hierarchical control approach of vehicle handling stability improvement based on Steer-by-Wire systems. Mechatronics 2021, 77, 102583. [Google Scholar] [CrossRef]
- Li, L.; d’Andréa-Novel, B.; Quadrat, A. Longitudinal and lateral control for four wheel steering vehicles. IFAC Pap. 2020, 53, 15713–15718. [Google Scholar] [CrossRef]
- Wang, L.; Pang, H.; Wang, P.; Liu, M.; Hu, C. A yaw stability-guaranteed hierarchical coordination control strategy for four-wheel drive electric vehicles using an unscented Kalman filter. J. Frankl. Inst. 2023, 360, 9663–9688. [Google Scholar] [CrossRef]
- Chen, W.; Liang, X.; Wang, Q.; Zhao, L.; Wang, X. Extension coordinated control of four wheel independent drive electric vehicles by AFS and DYC. Control. Eng. Pract. 2020, 101, 104504. [Google Scholar] [CrossRef]
- Appleyard, M.; Wellstead, P.E. Active suspensions: Some background. IEE Proc. Control. Theory Appl. 1995, 142, 123–128. [Google Scholar] [CrossRef]
- Gillespie, T.D. Fundamentals of Vehicle Dynamics; SAE International: Warrendale, PA, USA, 1992. [Google Scholar]
- He, H.; Li, Y.; Clare, L.; Jiang, J.Z.; Sakka, M.A. A configuration-optimisation method for passive-active-combined suspenstion design. Int. J. Mech. Sci. 2023, 258, 108560. [Google Scholar] [CrossRef]
- Shi, X.; Yu, Q.; Wu, Z.; Li, J.Y.; Zhu, S. Active control for vehicle suspension using a self-powered dual-function active electromagnetic damper. J. Sound Vib. 2023, 569, 117976. [Google Scholar] [CrossRef]
- Chen, G.; Jiang, Y.; Tang, Y.; Xu, X. Revised adaptive active disturbance rejection sliding mode control strategy for vertical stability of active hydro-pneumatic suspension. ISA Trans. 2023, 132, 490–507. [Google Scholar] [CrossRef]
- Liu, P.; Zheng, M.; Ning, D.; Zhang, Z.; Du, H. Decoupling vibration control of a semi-active electrically interconnected suspension based on mechanical hardware-in-the-loop. Mech. Syst. Signal Process. 2022, 166, 108455. [Google Scholar] [CrossRef]
- Kim, J.; Lee, T.; Kim, C.; Yi, K. Model predictive control of a semi-active suspension with a shift delay compensation using preview road information. Control. Eng. Pract. 2023, 137, 105584. [Google Scholar] [CrossRef]
- Luo, J.; Li, P.; Li, P.; Cai, Q. Observer-based multi-objective integrated control for vehicle lateral stability and active suspension design. J. Sound Vib. 2021, 508, 1169222. [Google Scholar] [CrossRef]
- Cho, S.; Im, J. Analysis of vehicle dynamic with car suspension design. J. Korean Soc. Mech. Eng. 1993, 33, 871–883. [Google Scholar]
- Min, H.K.; Tak, T.O.; Lee, J.M. Kinematic design sensitivity analysis of suspension system using direct differentiation. Trans. Korean Soc. Automot. Eng. 1997, 5, 38–48. [Google Scholar]
- Song, S.J.; Moon, H.K.; Cho, B.K. A study on the effects of flexibilities of suspension system of a vehicle for handling performance. Trans. Korean Soc. Automot. Eng. 1998, 6, 186–197. [Google Scholar]
- Zhang, Y.; Xiao, P.; Palmer, T.; Farahani, A. Vehicle Chassis/Suspension Dynamics Analysis—Finite Element Model vs. Rigid Body Model; SAE Technical Paper 980900; SAE International: Warrendale, PA, USA, 1998. [Google Scholar]
- Sohn, S.H.; Shin, H.-W.; Lee, H.-W. The Improvement of Handling Performances through the Sensitivity Analysis Validated by the K & C Test; SAE Technical Paper 980898; SAE International: Warrendale, PA, USA, 1998. [Google Scholar]
- Sohn, J.; Kim, K.; Yoo, W. Selection of toe geometry and bushing stiffness to improve the vehicle handling characteristics. Trans. Korean Soc. Automot. Eng. 1999, 7, 186–193. [Google Scholar]
- Choi, H.; Kim, S.; Han, S.; Lee, S.; Oh, Y.; Lee, U.; Bae, H. Development of Optimized Actuator for Active Geometry Control Suspension; SAE Technical Paper 2007-01-0409; SAE International: Warrendale, PA, USA, 2007. [Google Scholar]
- Lee, S. A Study for the Vehicle Dynamic Enhancement via the Active Kinematic Control of Suspension. Ph.D. Thesis, Hanyang University, Seoul, Republic of Korea, 1996. [Google Scholar]
- Nemeth, B.; Gaspar, P. Nonlinear analysis and control of a variable-geometry suspension system. Control. Eng. Pract. 2017, 61, 279–291. [Google Scholar] [CrossRef]
- Feng, Z.; Yu, M.; Cheng, C.; Evangelou, S.A.; Jaimoukha, I.M.; Dini, D. Uncertainties investigation and mu-synthesis control design for a full car with series active variable geometry suspension. IFAC Pap. 2020, 53, 13882–13889. [Google Scholar]
- Fenyes, D.; Fazekas, M.; Nemeth, B.; Gaspar, P. Implementation of a variable-geometry suspension-based steering control system. Veh. Syst. Dyn. 2022, 60, 2018–2035. [Google Scholar] [CrossRef]
- Nissimagoudar, P.C.; Mane, V.; Gireesha, H.M.; Iyer, N.C. Hardware-in-the-loop (HIL) simulation Technique for an Automotive Electronics Course. In Proceedings of the 9th World Engineering Eduacation Forum, Chennai, India, 13–16 November 2019. [Google Scholar]
- Han, S.S.; Hwang, Y.K.; Nam, K.S. Development of an Air Suspension System HILS with Full Vehicle Model. In Proceedings of the KSAE Annual Conference Proceedings, Incheon, Republic of Korea, 24–26 November 2009. [Google Scholar]
- Traphoner, P.; Olma, S.; Kohlstedt, A.; Fast, N.; Jaker, K.P.; Trachtler, A. Hardware-in-the-Loop Simulation for a Multiacxial Suspension Test Rig with a Nonlinear Spatial Vehicle Dynamics Model. IFAC Pap. 2019, 52, 109–114. [Google Scholar]
- Hebin, W.; Rui, B. Design of Hardware-In-Loop Simulation Platform for Air Suspension Systems. IFAC Pap. 2018, 51, 142–145. [Google Scholar] [CrossRef]
- Jung, J.C.; Lee, K.S.; Kim, S.Y. Control of Active/Semi-Active Suspensions for Commercial Vehicles. In Proceedings of the KSAE Annual Conference Proceedings, Seoul, Republic of Korea, 29–30 November 1996. [Google Scholar]
- Kim, H.S.; Lee, H.C. Height and Leveling Control of Automotive Air Suspension System Using Sliding Mode Approach. IEEE Trans. Veh. Technol. 2011, 60, 2027–2041. [Google Scholar]
- Mihalic, F.; Truntic, M.; Hren, A. Hardware-in-the-Loop simulations: A Historical Overview of Engineering Challenges. Electronics 2022, 11, 2462. [Google Scholar] [CrossRef]
- Liang, J.; Lu, Y.; Pi, D.; Yin, G.; Zhuang, W.; Wang, F.; Feng, J.; Zhou, C. A Decentralized Cooperative Control Framework for Active Steering and Active Suspension: Multi-Agent Approach. IEEE Trans. Transp. Electrif. 2022, 8, 1414–1429. [Google Scholar] [CrossRef]
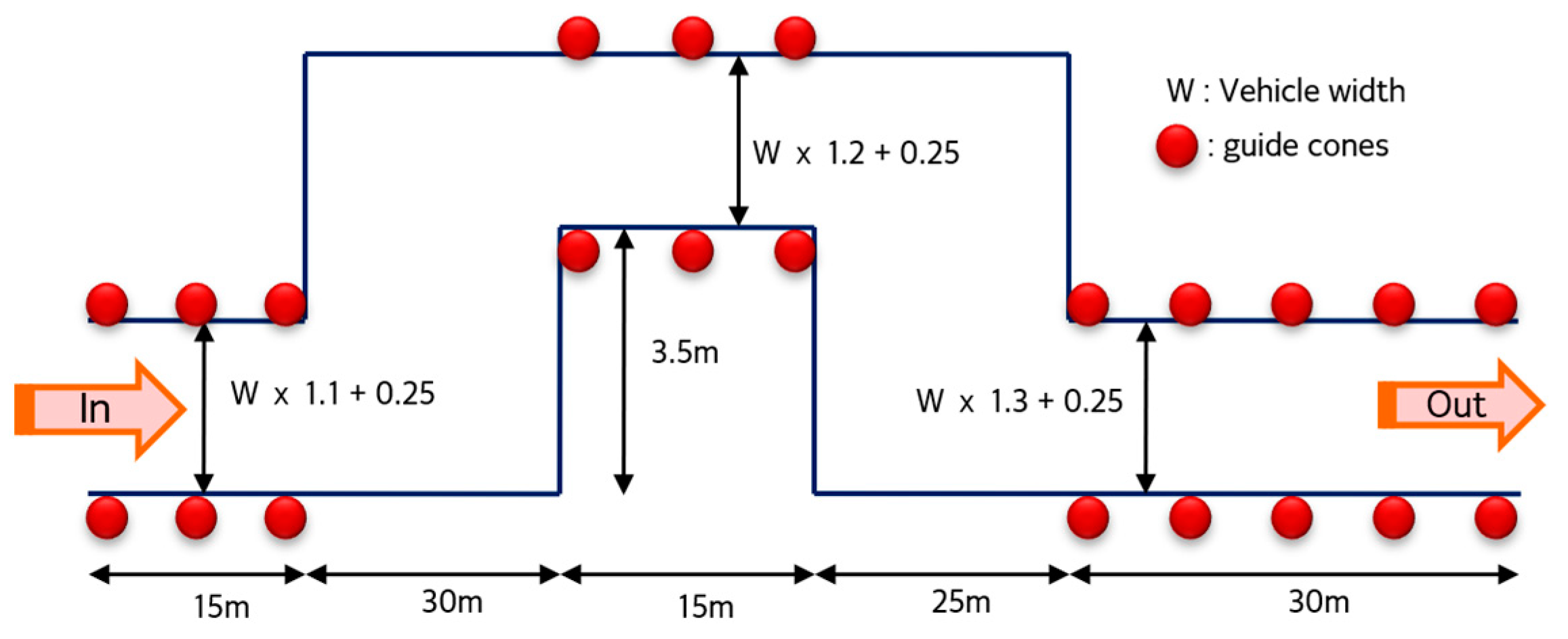
- ISO 3888-1; Passenger Cars—Test Track for a Severe Lane Change Manoeuvre—Part 1: Double Lane Change. Available online: https://www.iso.org/standard/67973.html (accessed on 11 September 2023).
- Zhou, K.; Wang, Z.; Gao, Q.; Yuan, S.; Tang, J. Recent advances in uncertainty quantification in structural response characterization and system identification. Probabilistic Eng. Mech. 2023, 74, 103507. [Google Scholar] [CrossRef]
- Quan, S.; Wang, Y.X.; Xiao, X.; He, H.; Sun, F. Feedback linearization-based MIMO model predictive control with defined pseudo-reference for hydrogen regulation of automotive fuel cells. Appl. Energy 2021, 293, 116919. [Google Scholar] [CrossRef]
- Worden, K.; Hickey, D.; Haroon, M.; Adams, D.E. Nonlinear system identification of automotive dampers: A time and frequency-domain analysis. Mech. Syst. Signal Process. 2009, 23, 104–126. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Location | Signal Type | Number of Channels |
|---|---|---|---|
| SAS | Steering Wheel Column | Steering wheel angle, Steering wheel angular velocity | 2 |
| WFT | Rear Wheel (L/R) | Fx, Fy, Fz, Mx, My, Mz | 12 |
| Strain Gauge | Rear Assist Arm (L/R) | Force on the assist arms | 2 |
| LVDT | Rear Suspension (L/R) | Bump/rebound stroke | 2 |
| RT-3100 | Center of Vehicle | Vehicle position, velocity, acceleration, heading angle, pitch, roll, yaw angle, | 16 |
| Output Variable | Input Variable | Correlation Factor |
|---|---|---|
| Assist Arm Force | Lateral Force (Fy) | r1 = 0.9801 |
| Assist Arm Force | Vertical Force (Fz) | r2 = 0.8108 |
| Assist Arm Force | Aligning Moment (Mz) | r3 = 0.9921 |
| Assist Arm Force | Suspension Height | r4 = 0.7191 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moon, C. Design and Implementation of Hardware-in-the-Loop Simulation Environment Using System Identification Method for Independent Rear Wheel Steering System. Machines 2023, 11, 996. https://doi.org/10.3390/machines11110996
Moon C. Design and Implementation of Hardware-in-the-Loop Simulation Environment Using System Identification Method for Independent Rear Wheel Steering System. Machines. 2023; 11(11):996. https://doi.org/10.3390/machines11110996
Chicago/Turabian StyleMoon, Chulwoo. 2023. "Design and Implementation of Hardware-in-the-Loop Simulation Environment Using System Identification Method for Independent Rear Wheel Steering System" Machines 11, no. 11: 996. https://doi.org/10.3390/machines11110996
APA StyleMoon, C. (2023). Design and Implementation of Hardware-in-the-Loop Simulation Environment Using System Identification Method for Independent Rear Wheel Steering System. Machines, 11(11), 996. https://doi.org/10.3390/machines11110996