
An Overview of Grounding Design and Grounding Fault Detection and Location Methods for a Multiphase Rectifier Generator Power Supply System

Abstract
:1. Introduction
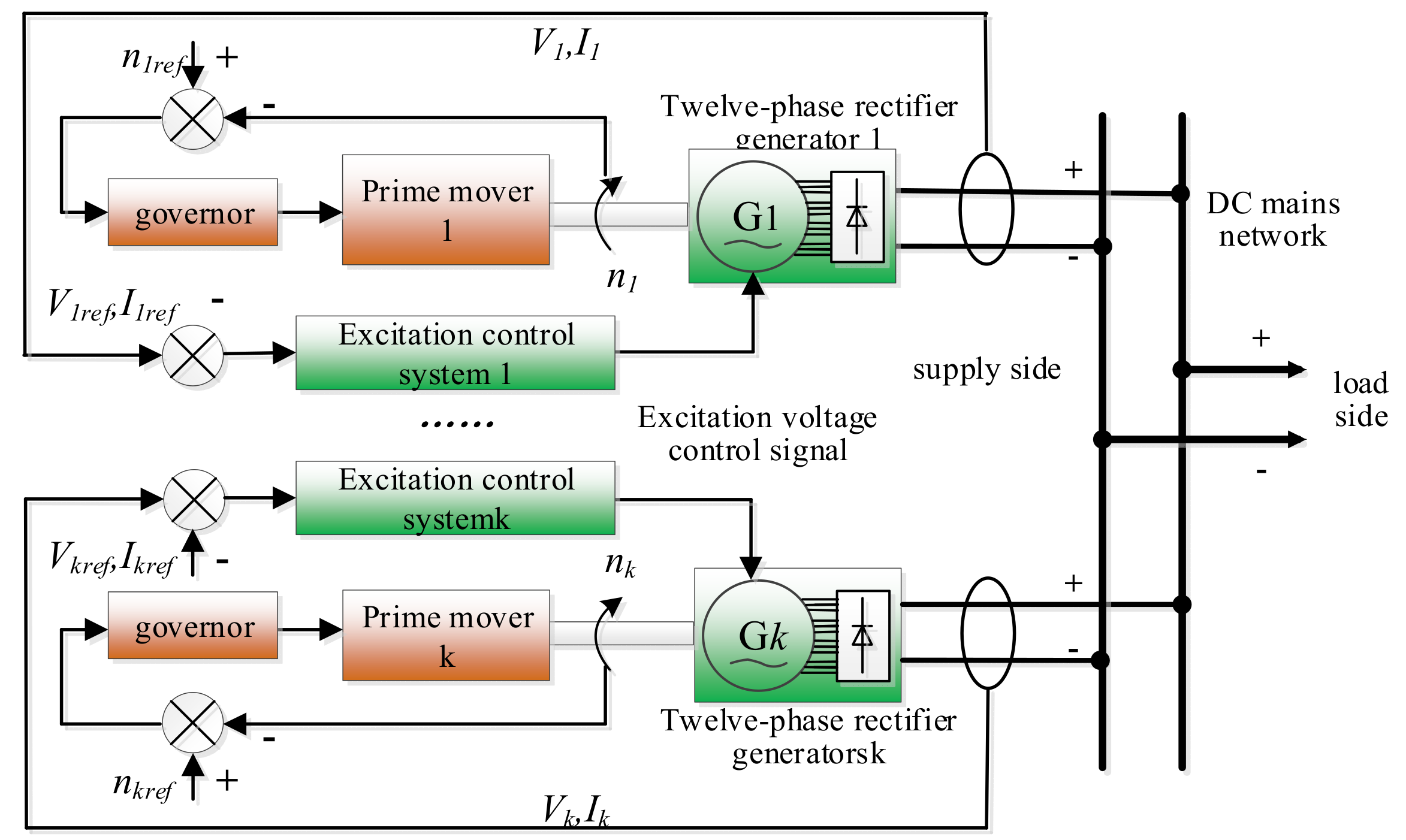
2. Twelve-Phase Rectifier Generator Power Supply System
2.1. System Topology
2.2. Generator Rectifier Bridge Connection
3. Grounding Design
3.1. Selection of Grounding Method
- 1.
- Ungrounded method:
- 2.
- Direct grounding:
- 3.
- Resistance grounding:
- 4.
- Resonant grounding:
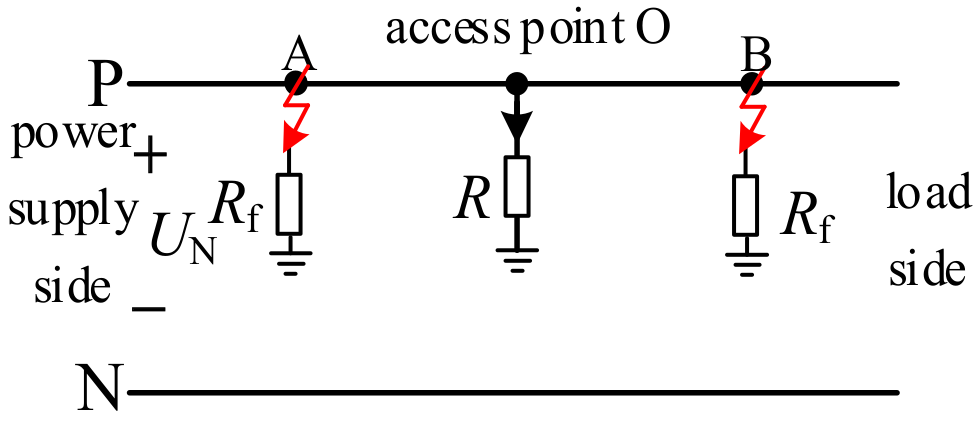
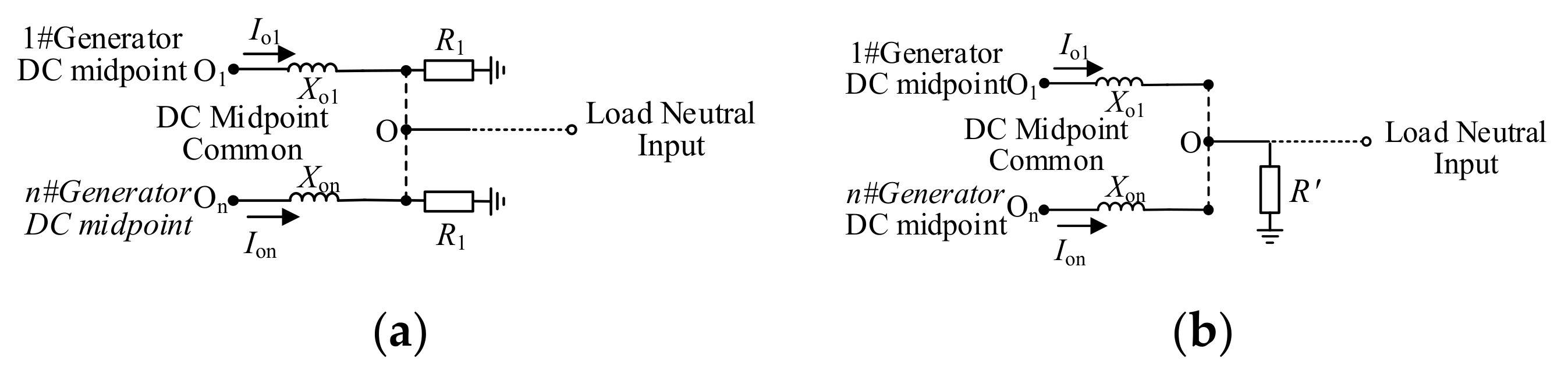
3.2. Selection of Grounding Location
3.3. Ground Resistance Calibration
4. Ground Fault Detection and Localization
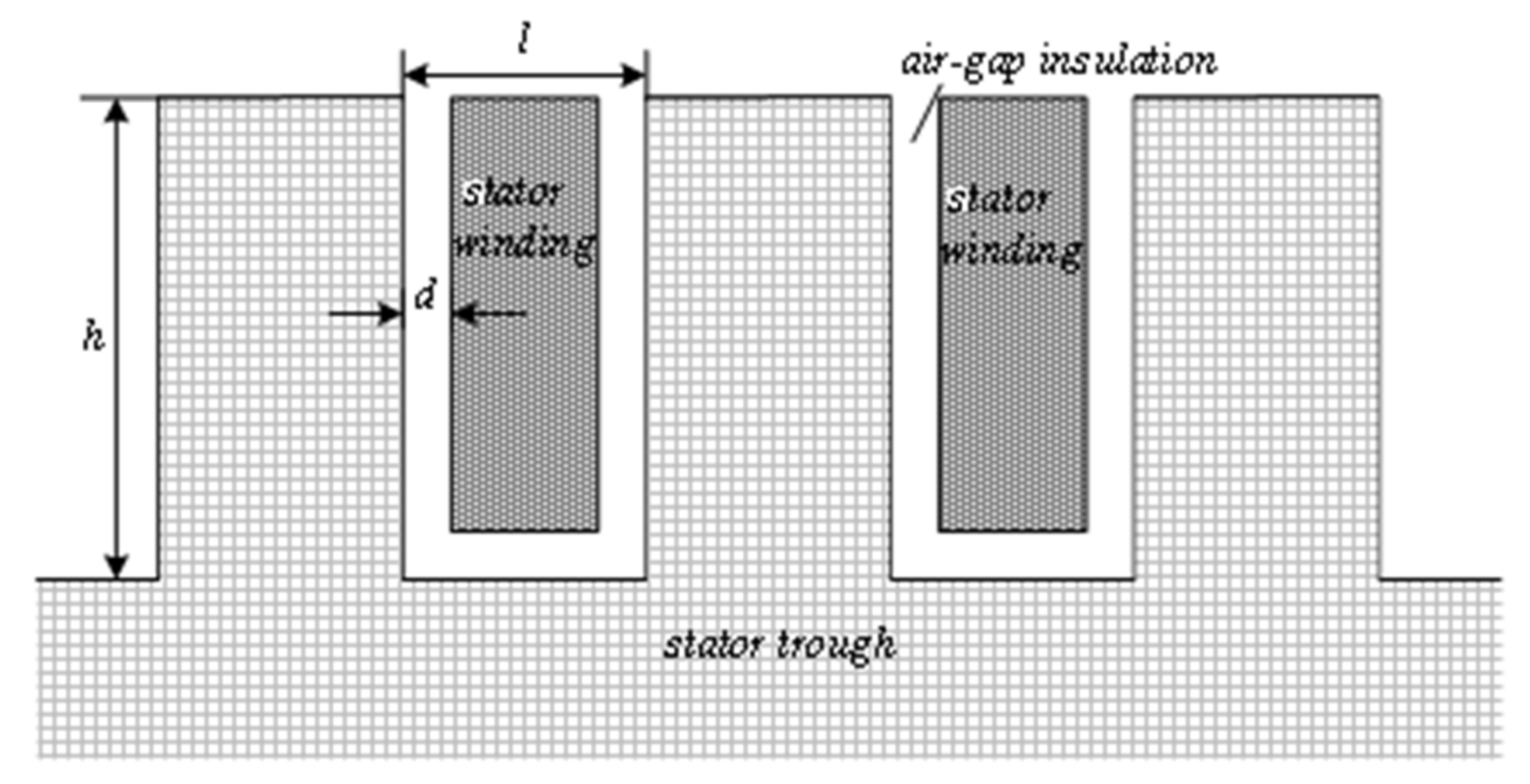
4.1. System Distributed Capacitance Calculation
4.2. Ground Fault Characteristic Analysis
4.2.1. Transient Stage
4.2.2. Steady–State Stage
4.3. Fault Detection and Localization
4.3.1. Passive Signal Method
4.3.2. Active Signal Method
5. Conclusions
6. Foresight
- Carry out an analysis of the multi-point grounding characteristics of a medium-voltage DC integrated power system, further optimize the system network topology and grounding scheme design, limit the magnitude of ground fault voltage and current fluctuations, and facilitate the design and specific implementation of fault detection, location, and protection.
- Based on information perception, artificial intelligence, and other advanced technologies, explore and research the grounding fault detection and location methods applicable to the medium-voltage DC integrated power systems of ships, which can realize online rapid location and minimize regional isolation and cooperative protection, reducing the impact on the system. At the same time, combined with the energy management system, it can intelligently optimize and regulate the integrated power system in multiple time scales and multiple target dimensions to ensure the system’s economy, mobility, and security.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ma, W. AC-DC power integration techniques. Eng. Sci. 2002, 4, 53–59. [Google Scholar]
- Sun, Y.; Wang, X.; Yin, Z. Harmonic Characteristics of AC/DC Converters and Their simplified Models. Autom. Electr. Power Syst. 2012, 36, 51–56. [Google Scholar]
- Wu, B.; Zhang, X.; Chen, L.; Xu, G.; Li, G. Researches on Influence of Grounding Mode of 12-Phase Generator with Rectifier Load on DC Overvoltage. Trans. China Electrotech. Soc. 2019, 34 (Suppl. 1), 321–326. [Google Scholar]
- Jordan, S.; Apsley, J. Open-circuit fault analysis of diode rectified multiphase synchronous generators for DC aircraft power systems. In Proceedings of the 2013 IEEE International Electric Machines & Drives Conference (IEMDC), Chicago, IL, USA, 12–15 May 2013; IEEE: New York, NY, USA, 2013; pp. 926–932. [Google Scholar]
- Zhang, X. Study on Fault Operation of Twelve-Phase Rectifier Generator System; Qingdao University: Qingdao, China, 2019. [Google Scholar]
- Fu, L.; Liu, L.; Wang, G.; Ma, F.; Ye, Z.; Ji, F.; Liu, L. The research progress of medium voltage DC integrated power system in China. Chin. J. Ship Res. 2016, 11, 72–79. [Google Scholar]
- Ma, W. Typical applications of power electronics in naval power systems. J. Electrotech. 2011, 26, 1–7. [Google Scholar]
- Ma, W. Reflections on the Compound Development of Ship Electrification and Informatization. J. Nav. Eng. Univ. 2010, 22, 1–4. [Google Scholar]
- He, Y.; Wen, Z. Power System Analysis; Huazhong University of Science and Technology Press: Wuhan, China, 2002. [Google Scholar]
- Wang, B.; Cai, L.; Tong, X.; Li, H.; Wang, H.; Liu, C.; Zhang, H.; Wang, L. Analysis of asymmetric short-circuit faults in neutral ungrounded systems. Power Syst. Prot. Control 2017, 45, 98–104. [Google Scholar]
- Guo, Q.; Wu, T. A review of fault routing methods for small-current grounding systems. Power Syst. Prot. Control 2010, 38, 146–152. [Google Scholar]
- Liu, J.; Zhang, Z.; Zhang, X.; Du, H.; Shi, J. Single phase to ground fault location based on distribution automation system. Autom. Electr. Power Syst. 2017, 41, 145–149. [Google Scholar]
- Dai, Z.; Ge, H.; Yan, S.; Jiao, Y.; Chen, X. Analysis of the impact of grounding mode on fault characteristics in flexible DC distribution networks. Grid Technol. 2017, 318–329. [Google Scholar]
- Yu, X.; Xiao, L. An overview of fault identification and location technology for DC distribution networks. Adv. Technol. Electr. Eng. Energy 2019, 38, 56–66. [Google Scholar]
- Chen, H.; Tian, X.; Gao, C.; Zheng, S.; Yan, C. Research overview on Fault Location for DC Microgrid. Guang Dong Electr. Power 2019, 32, 44–51. [Google Scholar]
- Zeng, X.; Wang, Z.; Yu, K.; Peng, H.; Zhuo, C.; Zhou, D. Arc Suppression Device for Actively Reducing Grounding Fault Phase Voltage Based on Phase Power Supply Feedback in Distribution Network and Its Application. High Volt. Eng. 2022, 48, 3356–3366. [Google Scholar]
- Flourentzou, N.; Agelidis, V.G.; Deetriades, G.D. VSC-based HVDC Power Transmission Systems: An Overview. IEEE Trans. Power Electron. 2009, 24, 592–602. [Google Scholar] [CrossRef]
- Li, X.; Fan, C.; Wang, G.; Jin, S. DC-side Fault Characteristics and Grounding Mode of Hybrid AC/DC Distribution Network with Two-terminal Power Supply. Autom. Electr. Power Syst. 2022, 46, 161–169. [Google Scholar]
- Jia, W.; Cao, S. Parameter optimization design of combination-type grounding mode for large-sized hydropower units. Electr. Power Autom. Equip. 2022, 42, 79–85. [Google Scholar]
- Salomonsson, D.; Soder, L.; Sannino, A. Protection of low-voltage DC microgrids. IEEE Trans. Power Deliv. 2009, 24, 1045–1053. [Google Scholar] [CrossRef]
- Tian, J.; Yao, L. Analysis of the Influences of Small Resistance Grounding on Distribution Network Reliability. Electr. Eng. 2022, 23, 121–122/126. [Google Scholar]
- Zeng, R.; Zhao, Y.; Zhao, B.; Zhong, Q.; Tong, Y.; Yuan, Z.; Yu, Z.; Zhao, Z.; Li, Y.; Chen, J. Research and application prospects of technologies for DC power distribution. Proc. CSEE 2018, 38, 6791–6801. [Google Scholar]
- Wang, Y.; Fu, Y.; Zeng, Q.; Song, Y. Review on key techniques for fault protection of flexible DC grids. High Volt. Eng. 2019, 45, 2362–2374. [Google Scholar]
- Nian, H.; Kong, L. Review on Fault Protection Technologies of DC Microgrid. High Volt. Eng. 2020, 46, 2241–2254. [Google Scholar]
- Ye, Z.; Fang, M.; Ma, F. The principle of generator units switching on/off in naval vessel integrated power system. Ship Sci. Technol. 2012, 34, 49–52. [Google Scholar]
- Ji, F.; Fu, L.; Ye, Z. Experimental research of MVDC parallel operation generator sets for vessel integrated power systems. J. Nav. Univ. Eng. 2017, 29, 11–16. [Google Scholar]
- Guo, Y.-J.; Wang, D.; Yi, X. Currents of sudden DC-side short circuit of multiphase generator-rectifier system with series-parallel connection. Electr. Mach. Control 2017, 22, 77–92. [Google Scholar]
- Hu, L.; Xiao, F.; Lou, X.; Ai, S.; Gao, S. Research on output voltage abnormal voltage pulses of three-level H-bridge inverter base on cascaded carrier modulation. Proc. CSEE 2019, 39, 266–276. [Google Scholar]
- Gao, Z.; Li, Y.; Ge, Q.; Zhao, L.; Wang, K. Improved phase opposition disposition pulse width modulation strategy for three-level neutral point clamped converter. Trans. China Electrotech. Soc. 2021, 36, 831–842. [Google Scholar]
- Xue, S.; Li, Z.; Liu, C.; Jia, C.; Wang, J.; Li, F.; Zhu, X. Review of DC Microgrids Grounding and Study on Protection Methods Based on Control and Protection Cooperation. High Volt. Eng. 2020, 46, 2255–2268. [Google Scholar]
- Dai, Z.; Zhu, H.; Su, H.; Wang, Z. Sequence Component Networks in Hybrid AC/DC Power Systems and Its Application in Analysis on Influence of CDSM-MMC DC-Side Short Fault on AC Side. Power Syst. Technol. 2018, 42, 3583–3593. [Google Scholar]
- Howar, F. Designing All Electric Naval Surface Ship; Navy: Arlington, VA, USA, 2008. [Google Scholar]
- Gustafson, R.; Albertson, V. Neutral-to-Earth Voltage and Ground Current Effects in Livestock Facilities. IEEE Trans. Power Appar. Syst. 1982, 9, 2009. [Google Scholar]
- Burke, J.; Marshall, M. Distribution system neutral grounding Transmission and Distribution Conference and Exposition. IEEE PES 2001, 28, 10–13. [Google Scholar]
- Cao, Z.; Guo, X.; Jia, X. Study on grounding mode of distribution network. North China Electr. Power 2007, 51–54. [Google Scholar]
- Javed, W.; Chen, D.; Farrag, M.E.; Xu, Y. System configuration, fault detection, location, isolation and restoration: A review on LVDC microgrid protections. Energies 2019, 12, 1001. [Google Scholar] [CrossRef]
- Qi, Z.; Tian, J.; Xue, Y.; Cai, Z.; Xu, B. Analysis of Power Frequency Electrical Quantity and Line Selection Applicability for Two-Piont Grouding Faults Occurring on Different Phase in Isolated Neutral System. Trans. CN Electr. Society 2023, 38, 3539–3551. [Google Scholar]
- Pan, B.; Guan, T.; Gui, X.; Xue, Y.; Guo, L. Characterization of high-resistance grounding faults in ungrounded systems and analysis of routing applicability. J. Power Syst. Autom. 2017, 56–63. [Google Scholar]
- Su, J. Research of neutral grounding modes in power distribution network. Power Syst. Prot. Control 2013, 41, 141–148. [Google Scholar]
- Liu, Y.; Wang, J.; Mi, H. Optimization research on neutral grounding mode of 10 kV distribution network. High Volt. Technol. 2015, 3355–3362. [Google Scholar]
- Mohammadi, J.; Ajaei, F.B.; Stevens, G. Grounding the DC microgrid. IEEE Trans. Ind. Appl. 2019, 55, 4490–4499. [Google Scholar] [CrossRef]
- Ye, Y.; Wang, S.; Xie, M.; Cai, X.; Xu, B.; Wei, L. Study on the Control method of High Impedance faults in the neutral Via Arc Suppression Coil Paralleled with A Low Resistance Grounded system. Power Syst. Prot. Control 2021, 49, 181–186. [Google Scholar]
- Chen, L.; Li, G.; Zhang, X. Resistant Parameter Calculation for Shipboard Medium Voltage Neutral Grounded Generator. Mar. Electr. Electron. Eng. 2015, 35, 9–12. [Google Scholar]
- Wu, B.; Zhang, X.; Zhang, C.; Liu, S.; Xu, G. Influence of Grounding Mode of 6-phase Generator with Rectifier-Load on Harmonics in Shipboard Medium Voltage Power Systeme. Power Syst. Prot. Control 2019, 47, 92–98. [Google Scholar]
- Long, Y.; Ouyang, J.; Xiong, X.; Ma, G.; Yang, M. Protection principle of single-phase high resistance fault for distribution network based on zero-sequence power variation. Trans. China Electrotech. Soc. 2023. early view. [Google Scholar] [CrossRef]
- Shao, W.; Liu, Y.; Cheng, Y.; Zhang, Z.; Chen, C. Fault line selection method of grounding fault with high resistance in resonant grounding system based on intensive zero-sequence impedance characteristics. Electr. Power Autom. Equip. 2021, 41, 120–126. [Google Scholar]
- Liu, B.; Zeng, X.; Zhang, H.; Ma, H. Optimal control method for accurate and fast suppression of unbalanced zero-sequence voltage and voltage arc suppression full compensation. Trans. China Electrotech. Soc. 2022, 37, 645–654. [Google Scholar]
- Ye, Y.; Wang, S.; Huang, T.; Wei, L. Study on Grounding Mode of Neutral Point through Arc Suppression Coil in Parallel with Median Resistance. J. Electr. Eng. 2021, 16, 159–165. [Google Scholar]
- Zhang, B.; Hong, Y. Analysis on the Neutral Point Grounding via Arc Suppression Coil Paralleled Controllable Small Resistance. Electr. Saf. Technol. 2022, 24, 21–24. [Google Scholar]
- Zhang, Q. Research on Ground Fault Detection and Localization Method of Medium Voltage DC Integrated Power System; Naval Engineering University: Wuhan, China, 2015. [Google Scholar]
- Huang, H.; Ma, F.; Fu, L.; Zhang, X.; Jing, C. DC Neutral Point Circulating Current Characteristics and Suppression Method of Twelve-phase Rectifier Generator Parallel Power Supply System. Trans. China Electrotech. Soc. 2022, 37, 1760–1767. [Google Scholar]
- DL/T 620-1997; Overvoltage Protection and Insulation Matching of AC Electrical Devices. CSIC-DL: Madrid, Spain, 1997.
- Xia, Y.; Wan, Y.; Xi, H. Analysis of line over-voltage protection accident caused by multi-point grounding of PT secondary circuit. Electr. Eng. 2021, 94–98. [Google Scholar]
- Liu, S. Research on Neutral Grounding Method of Generator; Tianjin University: Tianjin, China, 2004. [Google Scholar]
- Wu, B.-X. Research on Grounding Method of Medium Voltage DC Power System of Ship; Naval Engineering University: Wuhan, China, 2019. [Google Scholar]
- Cao, S. Research Report on Neutral Grounding Technology of Power Supply System; China Shipbuilding Heavy Industry Corporation, 704 Research Institute: Shanghai, China, 2007. [Google Scholar]
- Borioli, E.; Brenna, M.; Faranda, R.; Simioli, G. Comparison between the Electrical capabilities of the cables used in LV AC and DC power lines. In Proceedings of the International Conference on Harmonics and Quality of Power, Lake Placid, NY, USA, 12–15 September 2004. [Google Scholar]
- Nie, D.; Luo, N. The Estimation on Distributed Capacitance of Middle-voltage Shipboard Power System. Mar. Electr. Electron. Eng. 2014, 34, 68–80. [Google Scholar]
- Wu, B.; Li, H.; Luo, N. Estimation of Medium Voltage Shore-to-Ship Power System Distributed Capacitance. Ship Electron. Eng. 2014, 34, 187–190. [Google Scholar]
- Li, C.; Zhao, C.; Xu, J.; Ji, Y.; Zhang, F.; An, T. A pole-to-pole short-circuit fault current calculation method for DC grids. IEEE Trans. Power Syst. 2017, 32, 4943–4953. [Google Scholar] [CrossRef]
- Li, C. Dynamic Modeling of DC Main Grid Grounded Short Circuit Characteristics of Shipboard Medium Voltage DC Integrated Power System; Naval Engineering University: Wuhan, China, 2019. [Google Scholar]
- Zhang, Q.; Fan, M.; Jiang, H. A Method of Grounding Fault Protection in DC Power System with Grounding Resistance. Mar. Electr. Electron. Eng. 2015, 35, 1–5. [Google Scholar]
- Ge, Y. New Relay Protection and Fault Ranging Principle and Technology; Xi’an Jiaotong University Press: Xi’an, China, 2007. [Google Scholar]
- Bai, T.; Zhang, B.; Dong, H. Application of traveling wave method in fault location and detection high voltage transmission line. Electr. Eng. 2020, 46–49. [Google Scholar]
- Qi, J.; Yang, G.; Luo, Z. Error analysis of phase difference magnetic modulation DC leakage current sensor. Autom. Instrum. 2018, 9, 149–152. [Google Scholar]
- Xue, S.; Lu, J.; Liu, C.; Fan, B.; Shi, Z.; Lian, J. Single-end fault ranging method for MMC-HVDC transmission system based on virtual line impedance. Grid Technol. 2019, 43, 2868–2875. [Google Scholar]
- Jia, K.; Dong, X.; Li, L.; Feng, T.; Bi, T. Distribution network fault ranging based on sparse voltage magnitude measurement. Grid Technol. 2020, 44, 835–845. [Google Scholar]
- Macedo, J.R.; Resende, J.W.; Bissochi, C.A.; Carlos, A.; Carvalho, D.; Castro, F. Proposition of an interharmonic-based methodology for high-impedance fault detection in distribution systems. IET Gener. Transm. Distrib. 2015, 9, 2593–2601. [Google Scholar] [CrossRef]
- Li, Y.; Meng, X.; Song, X. Application of signal processing and analysis in detecting single line-to-ground (SLG) fault location in high-impedance grounded distribution network. IET Gener. Transm. Distrib. 2016, 10, 382–389. [Google Scholar] [CrossRef]
- Shu, H.; Gong, Z.; Tian, X.; Dong, J.; Li, S. Singleline-to-ground fault line selection based on fault characteristic frequency band and morphological spectrum. Power Syst. Technol. 2019, 43, 1041–1048. [Google Scholar]
- Li, Z.; Liu, J.; Xi, Y.; He, Z.; Lv, J.; Long, X. Fault location method for distribution network based on transient waveform correlation. Autom. Electr. Power Syst. 2020, 44, 72–79. [Google Scholar]
- Tao, C.; Du, X.; Gao, F.; Wang, Y.; Yang, Q. Single-phase to ground fault location of hybrid transmission lines based on empirical wavelet transform. Power Syst. Prot. Control 2021, 49, 105–112. [Google Scholar]
- Zheng, W.; Zhang, F.; Li, W.; Lu, T. Single-phase ground fault location for EHV transmission lines based on dyadic wavelet transform. Electron. Des. Eng. 2021, 29, 115–118. [Google Scholar]
- Yang, Y.; Wu, H.; Tian, H. Single-ended intelligent fault location method for HVDC transmission lines. Proc. CSU-EPSA 2023, 35, 120–129. [Google Scholar]
- Deng, X.; Lin, Y.; Yu, H. Research on Cable Fault Location Based on Improved HHT. Mech. Electr. Inform. 2022, 82–85. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Methods | Cost | Advantage | Disadvantage |
|---|---|---|---|---|
| 1 | Ungrounded | No | Continue to operate with single fault | Difficult to detect the fault |
| 2 | Directly grounded | Low | Quick fault removal | Poor power supply continuity |
| 3 | Resistance grounding | Average | Good power supply continuity | Energy consumption during fault operation |
| 4 | Resonant grounding | Very High | Long line system | Large volume and difficulty in parameter tuning |
| Methods | Cost | Advantage | Disadvantage | |
|---|---|---|---|---|
| Passive detection method | Leakage current detection, impedance methods et al | High | Minimal impact on the power system, simple principle, and facilitates online fault monitoring | Requires high precision in collecting data on system state changes |
| Active detection method | Filtering transformations, morphological filtering, wavelet transformations, S-transform, Hilbert–Huang transform et al. | Low | Overcome the influence of system parameter | Easy to affect the power system, algorithm complexity, and difficulty in achieving online fault monitoring |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Ma, F.; Fu, L.; Zhu, W.; Li, C. An Overview of Grounding Design and Grounding Fault Detection and Location Methods for a Multiphase Rectifier Generator Power Supply System. Machines 2023, 11, 985. https://doi.org/10.3390/machines11110985
Huang H, Ma F, Fu L, Zhu W, Li C. An Overview of Grounding Design and Grounding Fault Detection and Location Methods for a Multiphase Rectifier Generator Power Supply System. Machines. 2023; 11(11):985. https://doi.org/10.3390/machines11110985
Chicago/Turabian StyleHuang, He, Fan Ma, Lijun Fu, Wei Zhu, and Chun Li. 2023. "An Overview of Grounding Design and Grounding Fault Detection and Location Methods for a Multiphase Rectifier Generator Power Supply System" Machines 11, no. 11: 985. https://doi.org/10.3390/machines11110985
APA StyleHuang, H., Ma, F., Fu, L., Zhu, W., & Li, C. (2023). An Overview of Grounding Design and Grounding Fault Detection and Location Methods for a Multiphase Rectifier Generator Power Supply System. Machines, 11(11), 985. https://doi.org/10.3390/machines11110985