1. Introduction
For tire and vehicle dynamics simulations and analyses, different types of tire models have been developed and categorized as empirical and theoretical models [
1,
2]. The empirical model, or combined theoretical and empirical model, is used for vehicle dynamics, and its model parameters are obtained by fitting measurements [
2], including the MF/PAC2002 [
2,
3,
4,
5], TMeasy [
6,
7,
8], UniTire [
9,
10], Hankook-Tire [
11], TameTire [
12,
13], MF-Swift [
14,
15], FTire [
16,
17], CDTire [
18,
19] and RMOD-K [
20,
21] models, etc.
However, compared with the theoretical tire model, the empirical model is not suitable for the mechanical analysis of tire dynamics and tire design due to having too many model parameters and being dependent on experimental data. Tire design engineers should find the optimal design parameters that can satisfy the engineering requirements simultaneously and, for more efficient product development, a reliable theoretical model is essential because it enables systematic parameter study and design optimization. The theoretical models have advantages over the finite-element models in terms of computational efficiency, and they can be incorporated into the parameter study and optimization framework more easily [
22]. Furthermore, combined with the static simulation data of the finite-element, using the theoretical model to achieve the steady and unsteady simulation should be a good prospect for future tire virtual development.
Fromm and Julien [
3,
23] proposed the brush tire model, which laid the foundation for tread modeling and tire theoretical analysis. The beam [
1,
3,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36] and string models [
3] are two classical belt/carcass modeling methods. Finally, the latest beam model includes belt tension, flexural rigidity, shear rigidity [
1,
22,
25,
26] and lateral shear force distribution [
1], and the relationship between the parameters of the beam model and the design parameters of belts is established [
1,
22].
H. Sakai [
28] pointed out that the previous practice of assuming the shape of the contact-patch as rectangular, the pressure distribution as lateral uniform and the longitudinal parabolic distribution does not reflect the reality; therefore, he studied the influence of different load, inflation pressure, camber, side slip angle and lateral force on the contact length in detail, and established a semi-empirical model of contact length with different rib along the width. Through the study of the distribution of contact patch-pressure on each rib, the empirical formula of contact patch pressure on each rib with load was established [
29]. Guo Konghui established the general function of pressure distribution based on a rectangular contact patch in which the convexity, uniformity and fore-aft shift of pressure-distribution were considered [
37,
38,
39]. Patrick Gruber, Robin S. Sharp and Andrew D studied normal and shear forces in the contact based on the finite-element model and established a 2D semi-empirical contact patch, considering longitudinal grooves as a function of vertical load and camber angle [
40]. Ch. Oertel established the geometric relationship between the contact patch and vertical load, camber angle and tread profile curvature [
41]; however, the contact patch length calculated by this method will be larger than the actual one, and the contact patch area caused by camber will be larger. Nakajima, Y. and Hidano, S. proposed two-dimensional contact patch considering that shear force, contact shape and contact pressure distribution are changed in the fore–aft and lateral direction caused by the camber, fore–aft and lateral external force [
1,
42], and the deficiency is that the contact patch shape is simply expressed as a rectangle or trapezoid.
Analytical [
3,
39,
43,
44,
45,
46,
47,
48,
49,
50] and numerical methods are usually used to solve theoretical models. The advantage of the former is high efficiency, but it is only suitable for simple theoretical models. With the increase of the complexity of the theoretical model, the numerical method becomes more and more important. TreadSim [
3] is a typical representative for the steady-state numerical solution; however, the iteration process turned out to be unstable for certain combinations of vertical load, belt yaw and belt bend stiffness [
51], and the method proposed in [
51] does not actually solve the problem essentially by iteration. For unsteady-state numerical solutions, there are two different (but essentially the same) methods that are both based on the Lagrange description. An element that leaves the contact patch at one side is redefined in the model so that it will enter the contact patch at the opposite side. After a new element has entered the contact patch, the elements are also renumbered so that element number one is always the first element in the contact patch, and when the traveling distance in an increment time is larger than the distance between adjacent tread elements, a linear-interpolation method is used [
52,
53,
54,
55]. However, this method has some problems under the condition of turn slip or load variations inputs, which will be discussed in this paper. There are many methods for the iterative solution of matrix equations, including the traditional [
56,
57] and the latest [
58,
59], and different methods are suited for different application scenarios. For dynamic equations of tire models which usually consider mass, Newton’s method and the Newmark-beta method are always used [
60,
61]. However, in this paper, we do not intend to focus on the development of new iterative methods, but to reconstruct the matrix equations that can meet the application requirements of different iterative methods and compare several common iterative methods to select the most suitable for the discrete theoretical model and make appropriate optimizations.
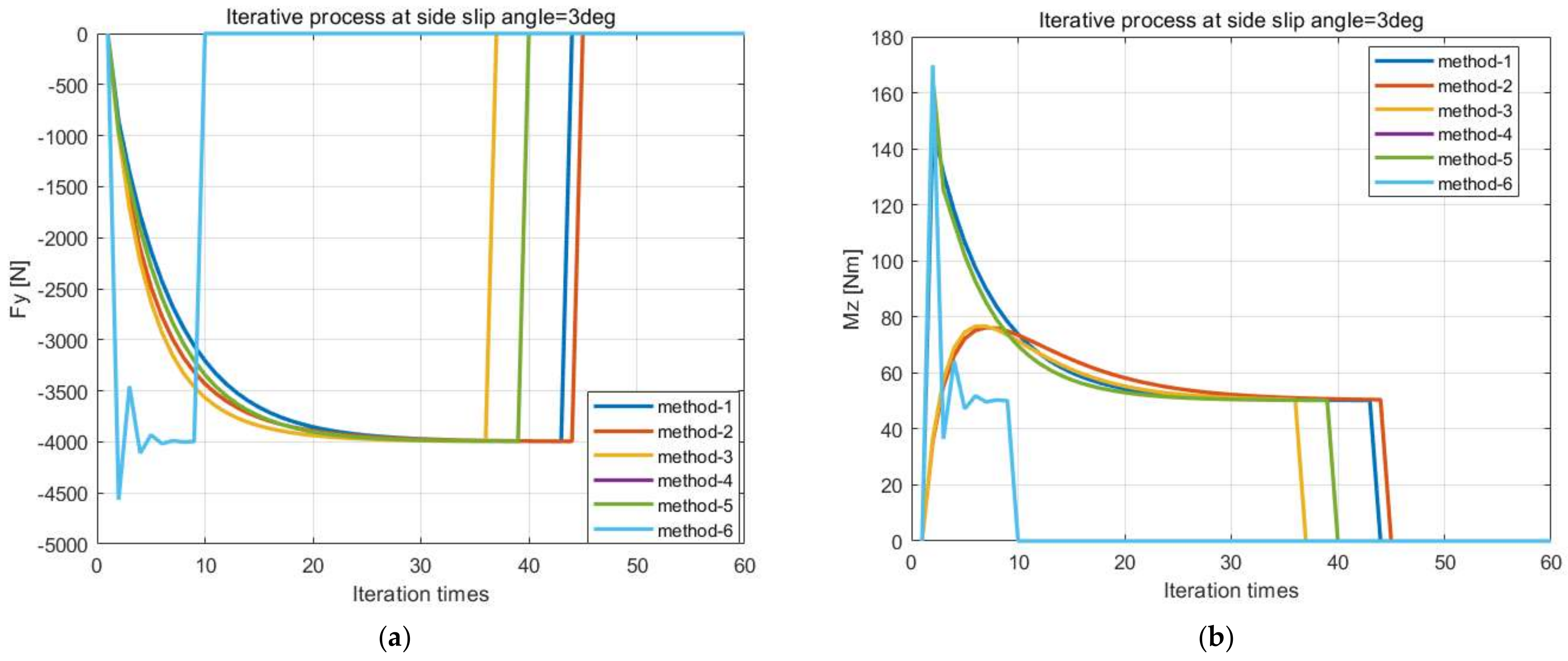
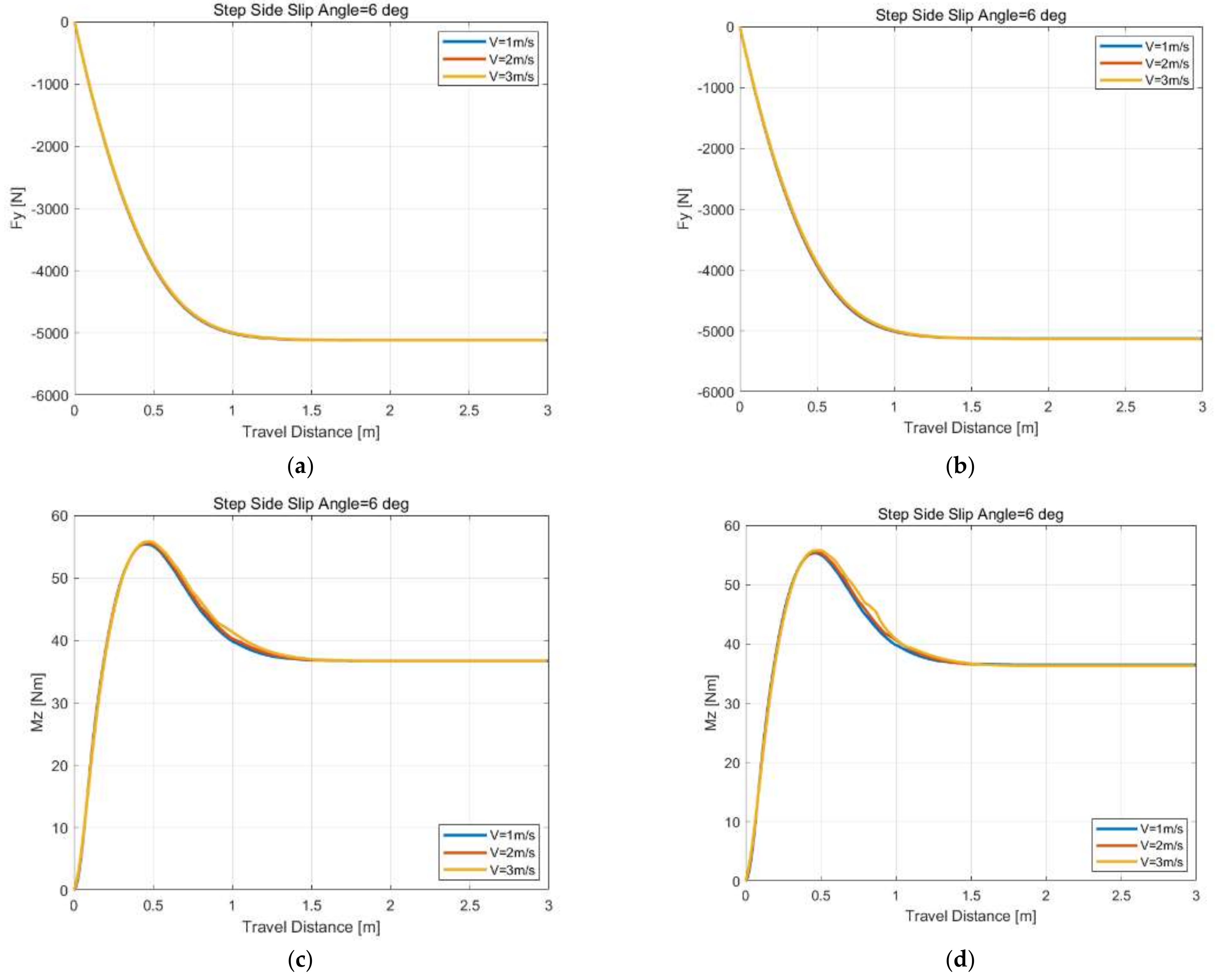
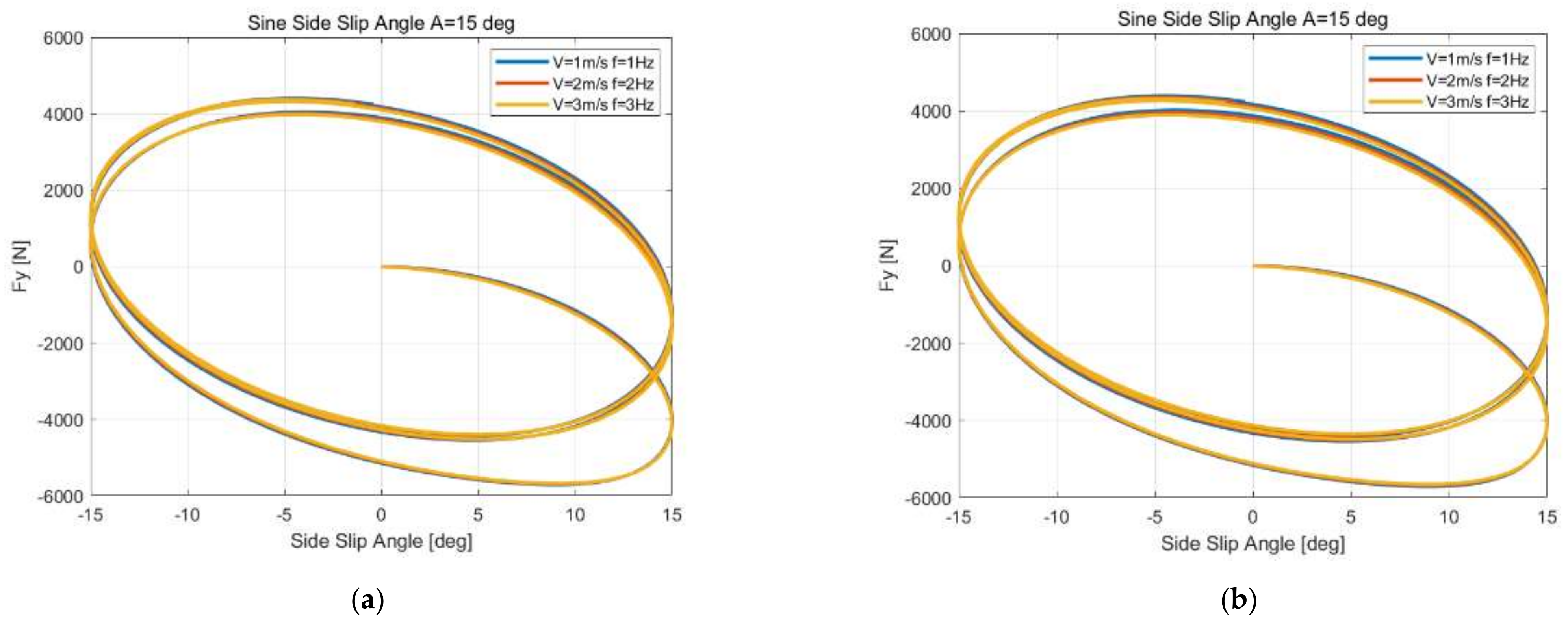
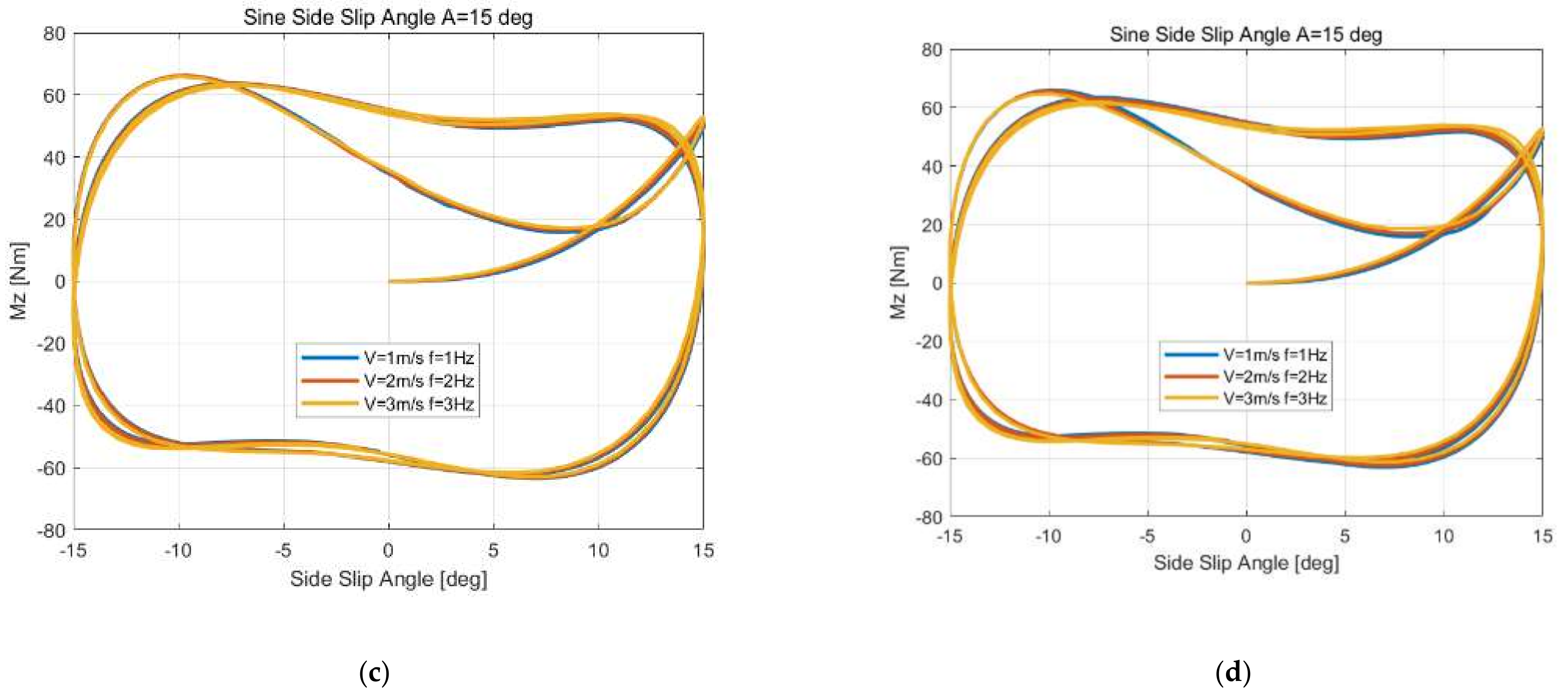
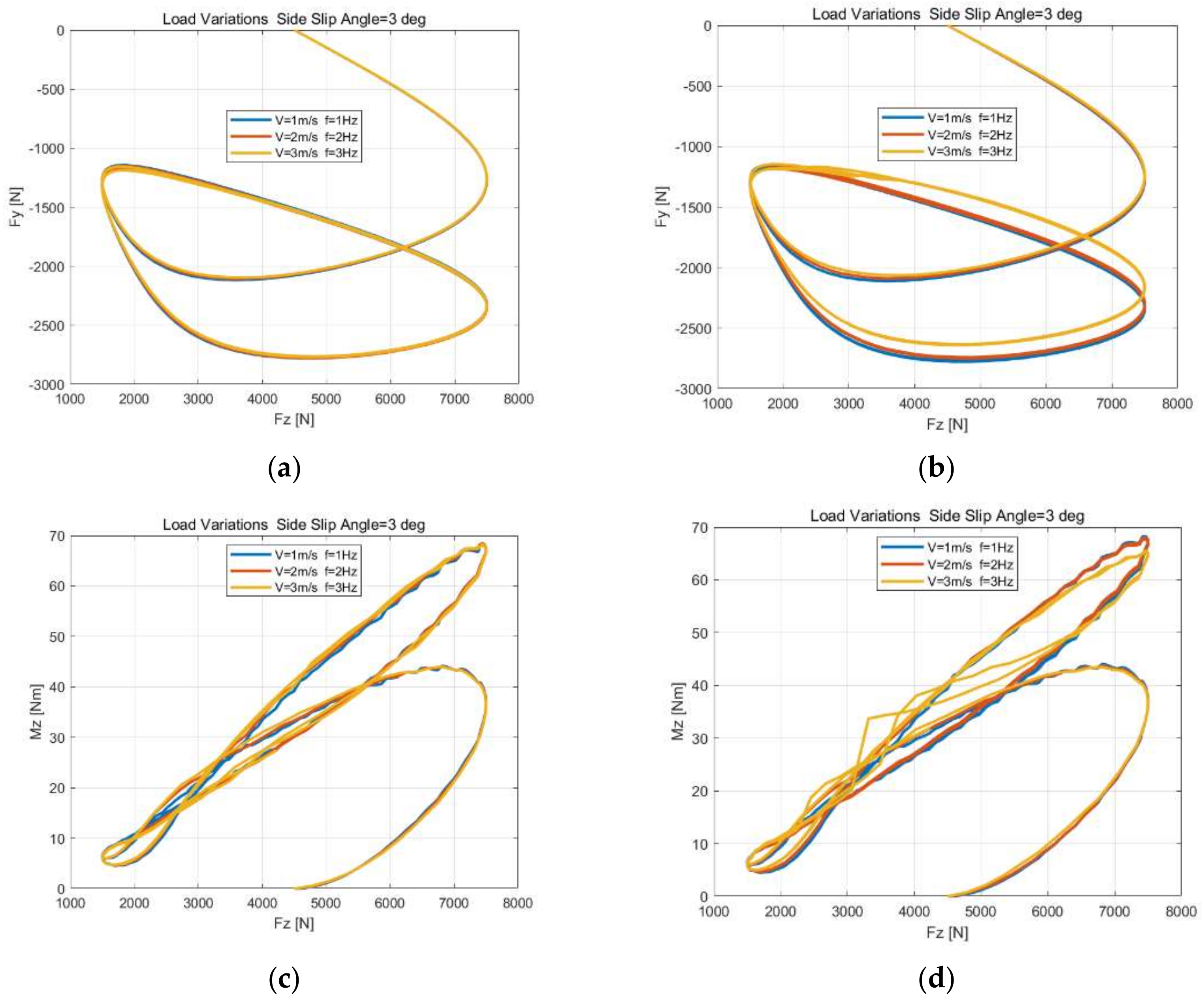
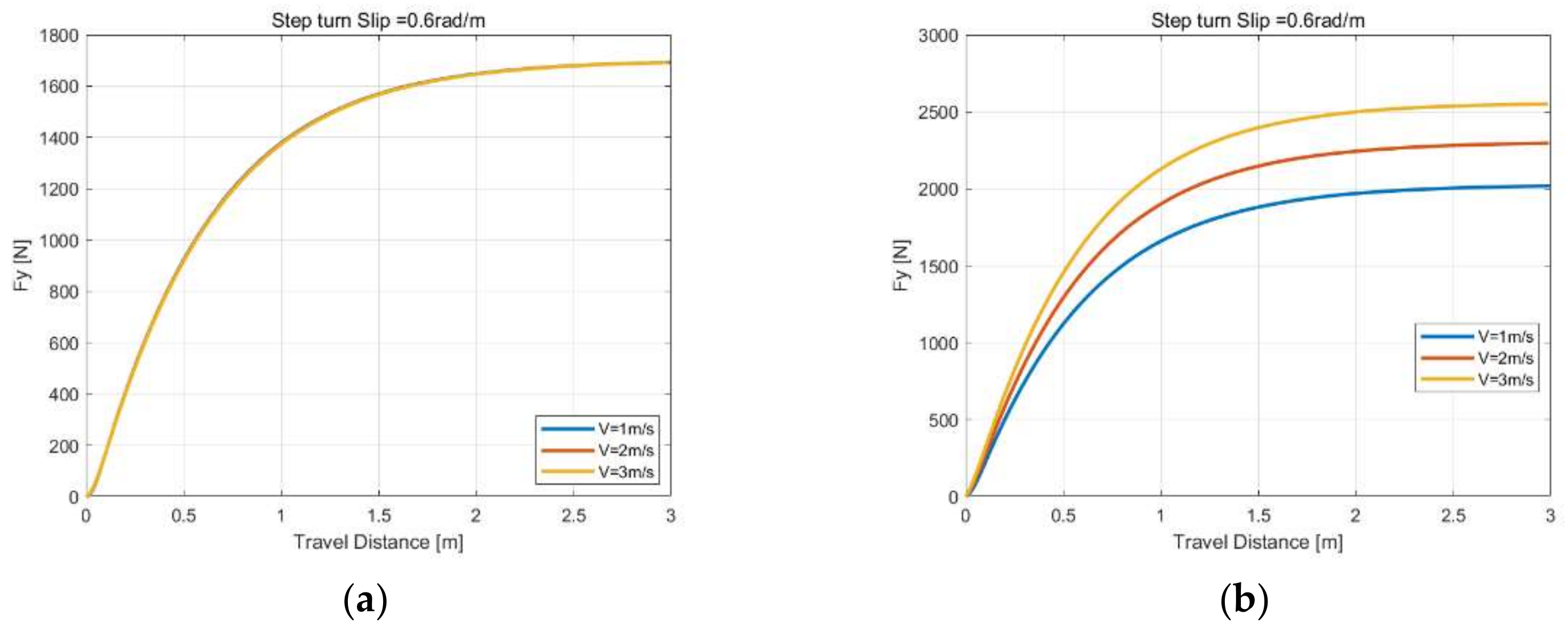
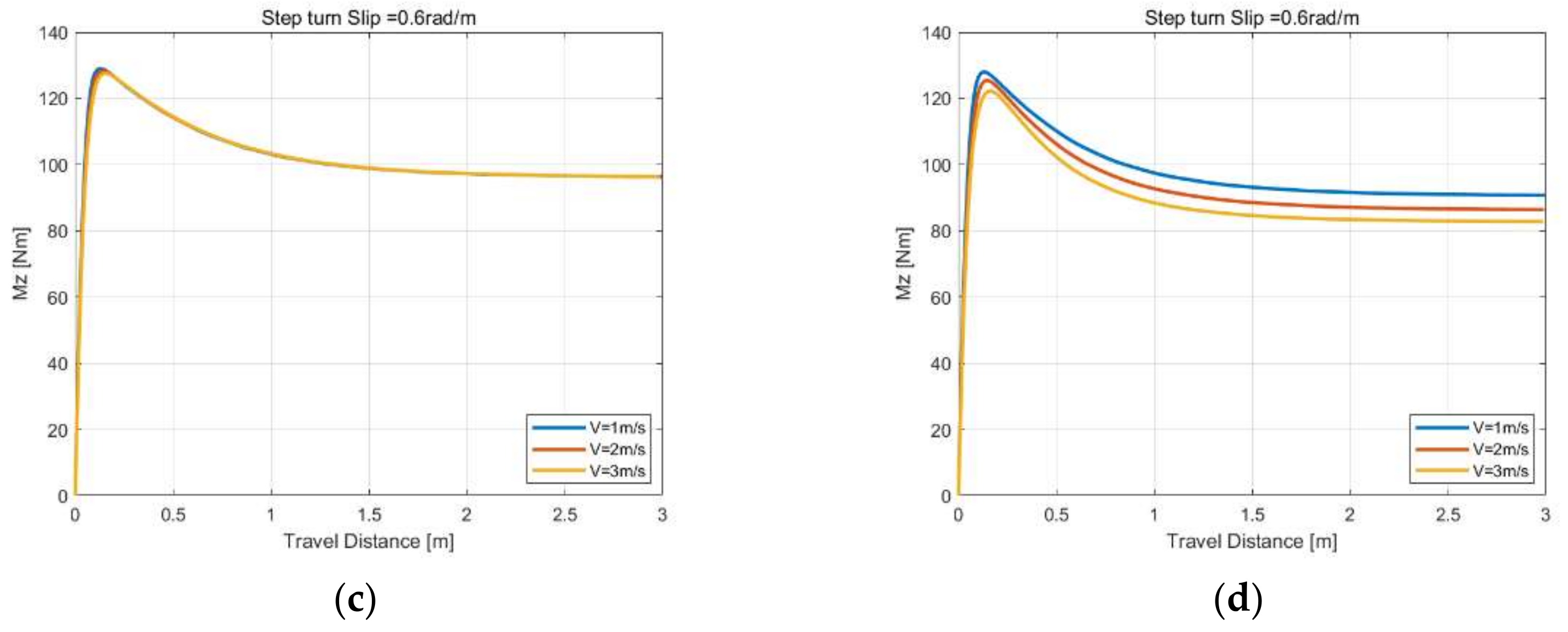
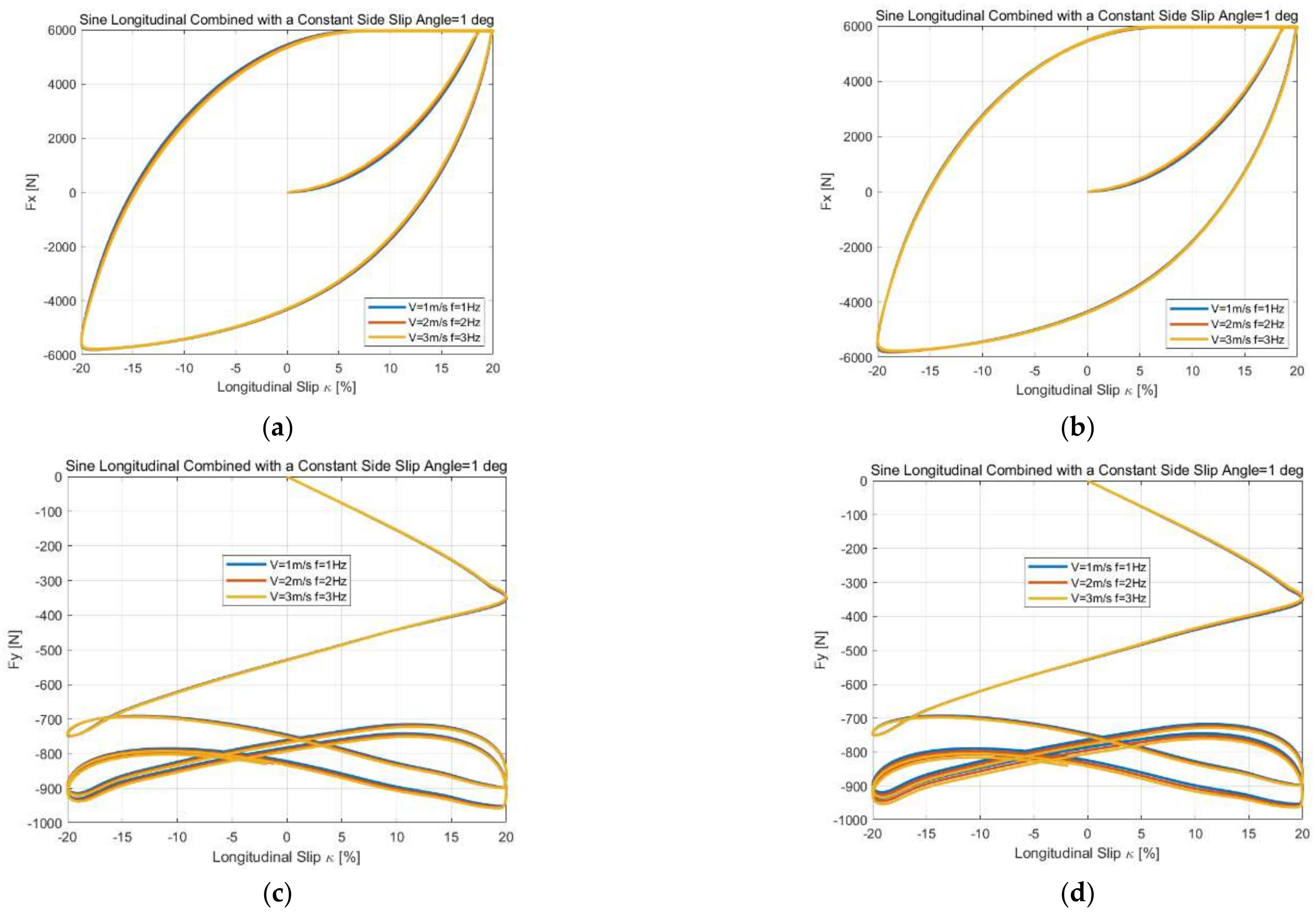
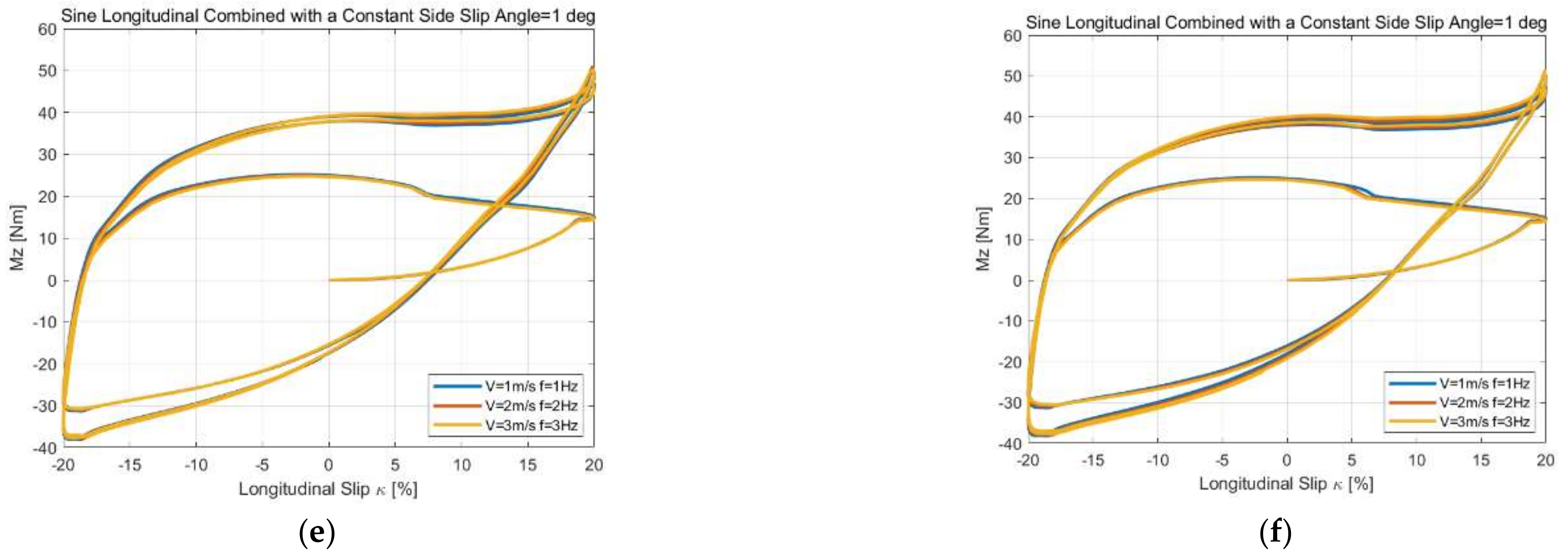
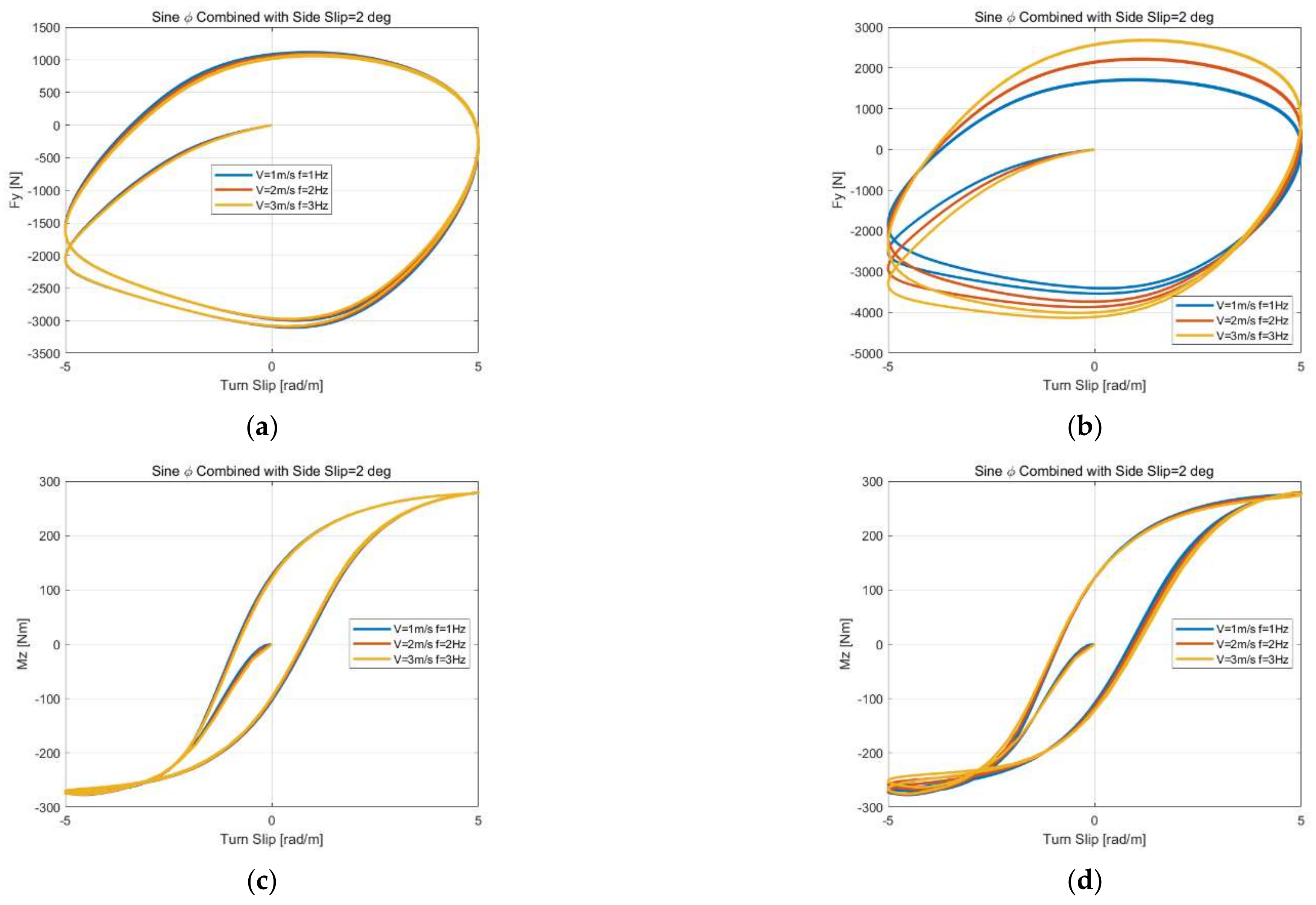
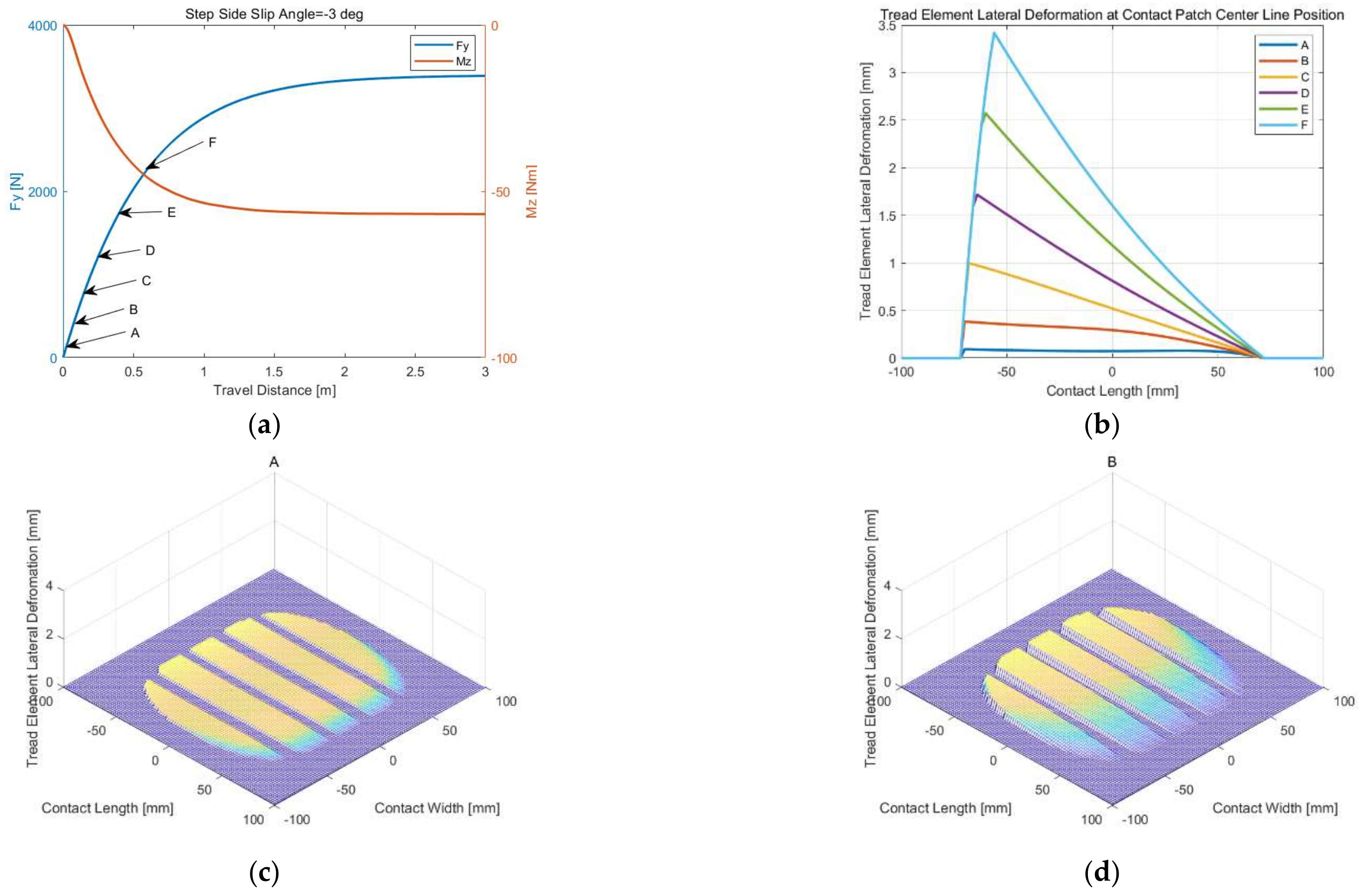
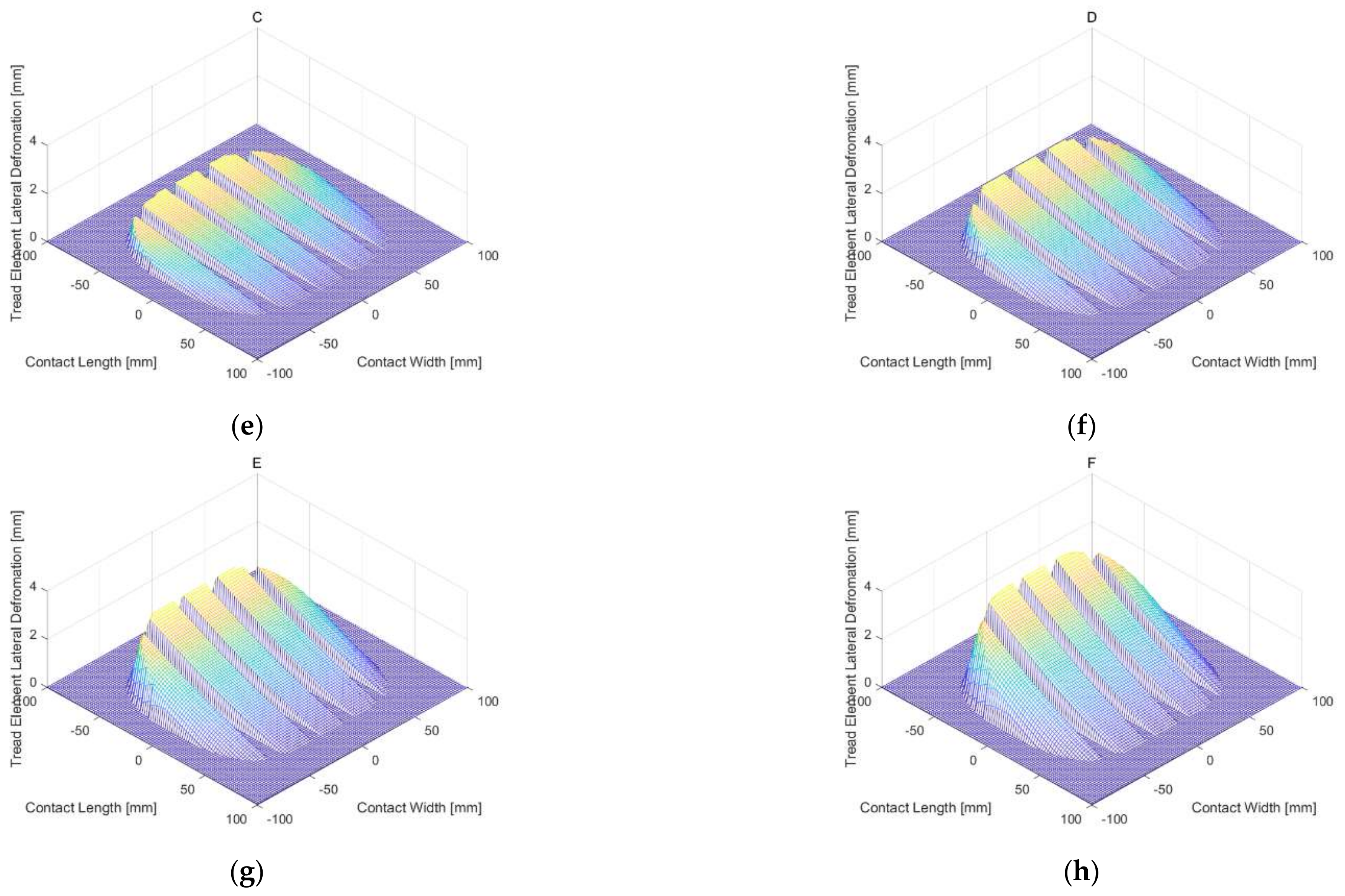
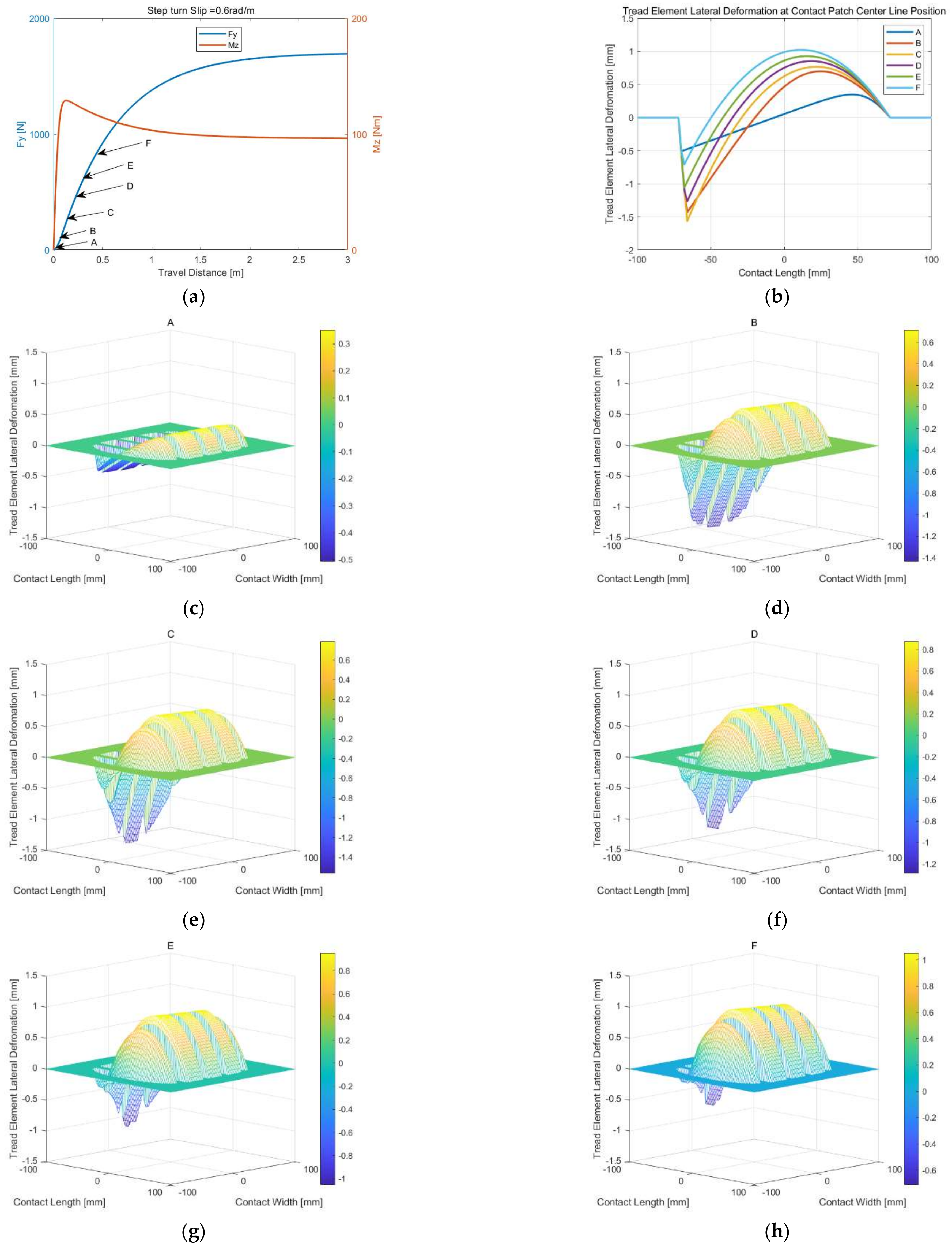
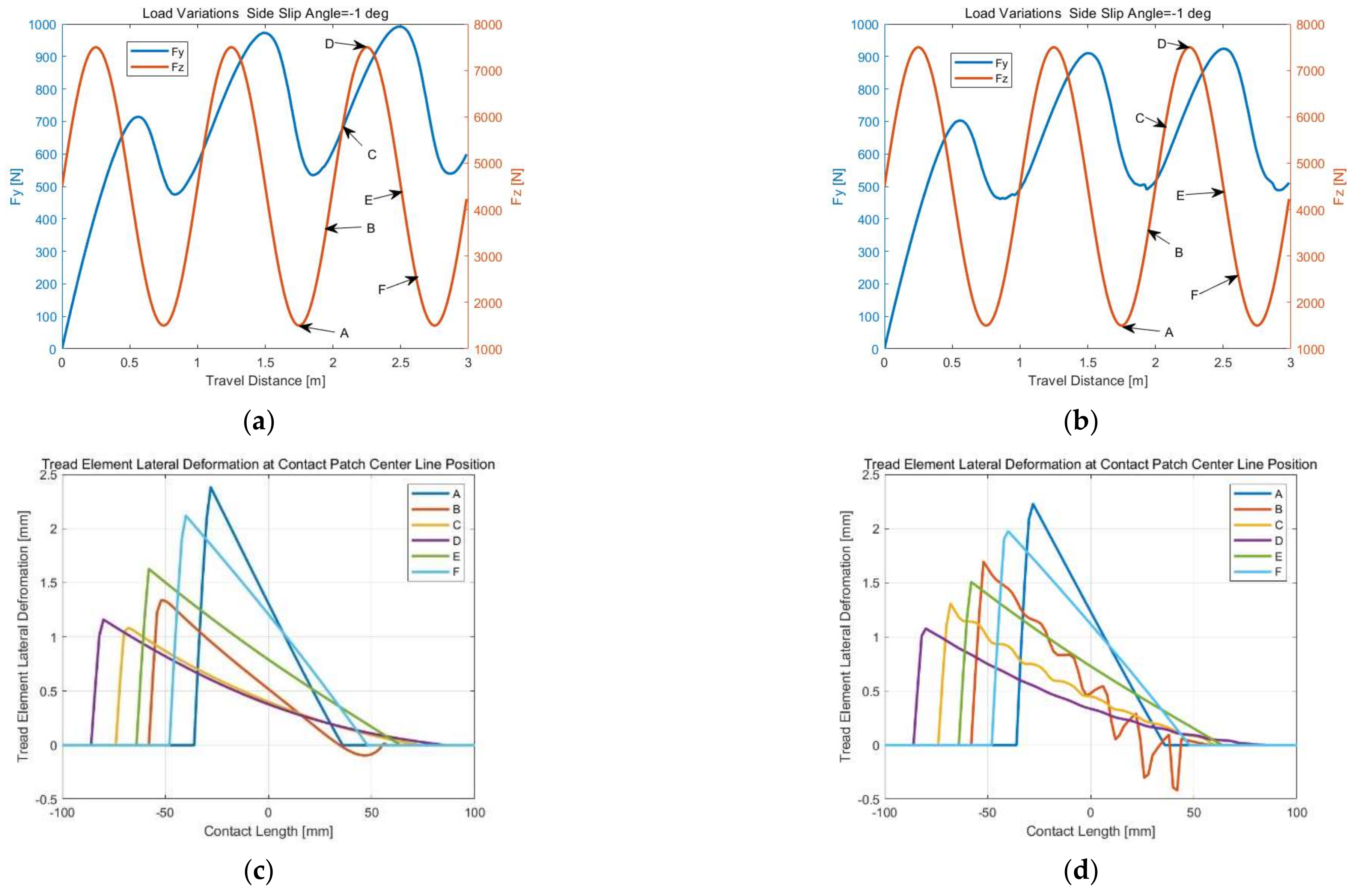
In this paper, a novel matrix equation for the force and moment calculation is constructed and different iterative methods are compared under steady-state constant side slip angle and unsteady-state conditions, including the step side slip, sine side slip, load variations at constant side slip, sine side slip angle at constant turn slip and sine longitudinal slip at constant side slip inputs. It shows that only the modified Richardson method proposed in this paper can complete all of the simulations without any convergence. A novel, discrete solution method for tire total deformation is proposed based on the Euler method, and time derivatives are replaced by spatial gradients. Furthermore, based on the condition of the unsteady characteristics of tire models only relating to the path frequency without changing their parameters, the discrete solution method proposed is compared with reference [
52,
53,
54,
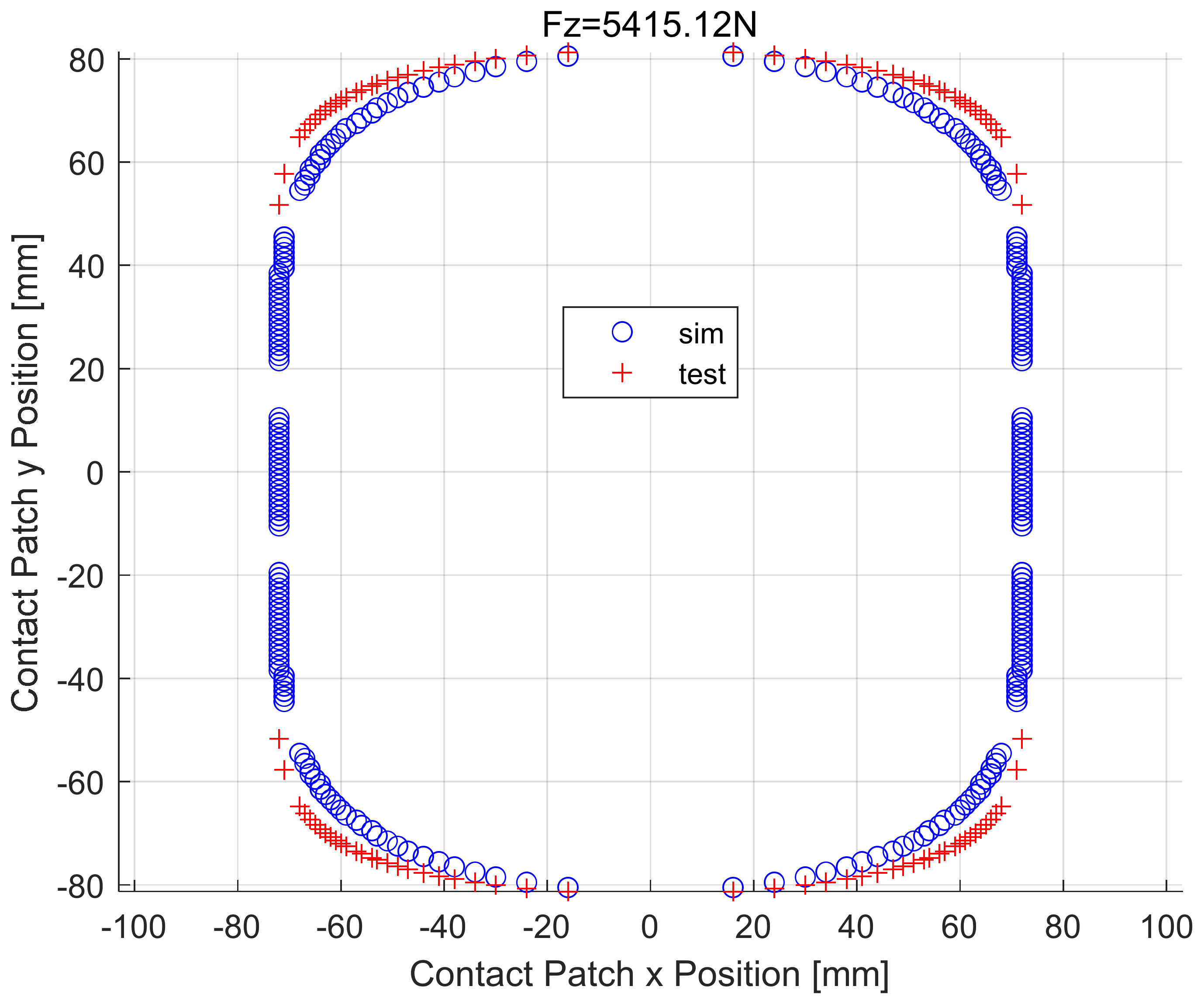
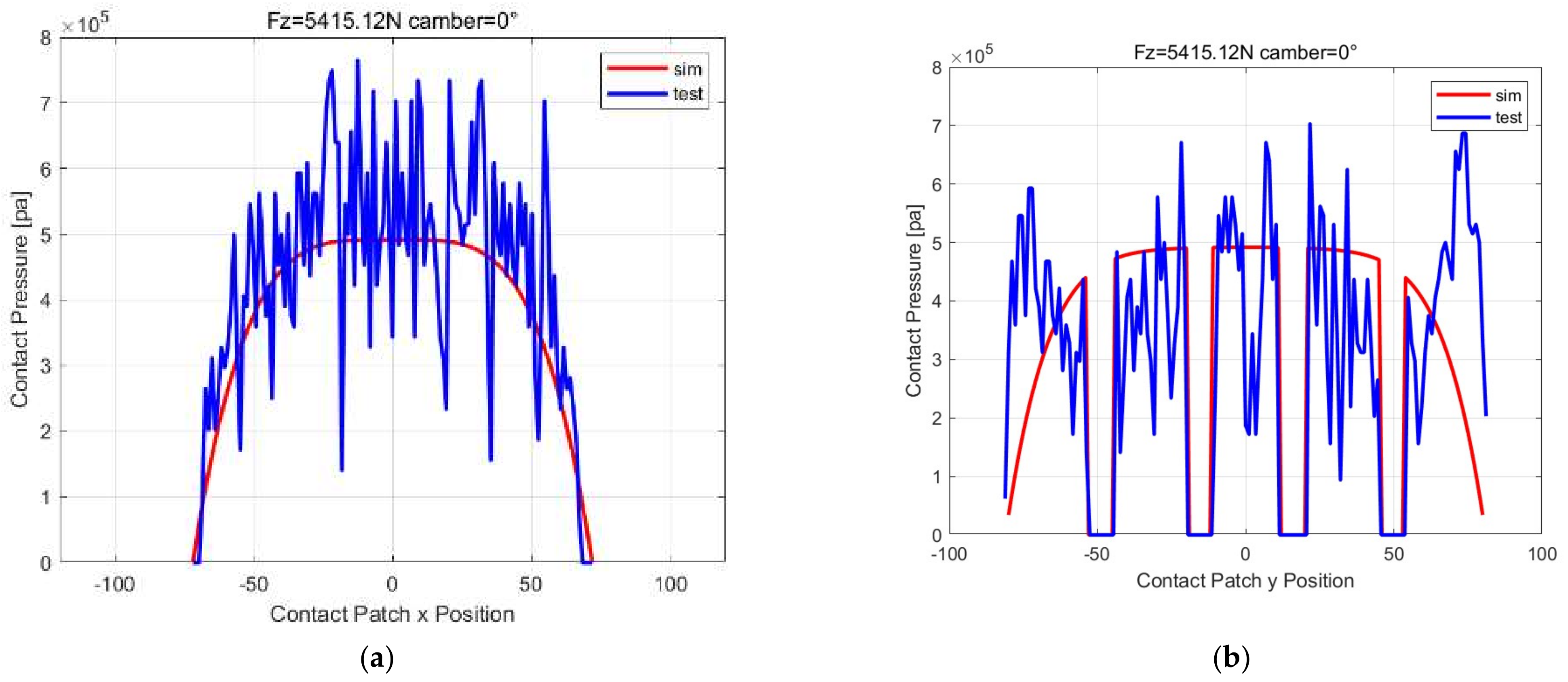
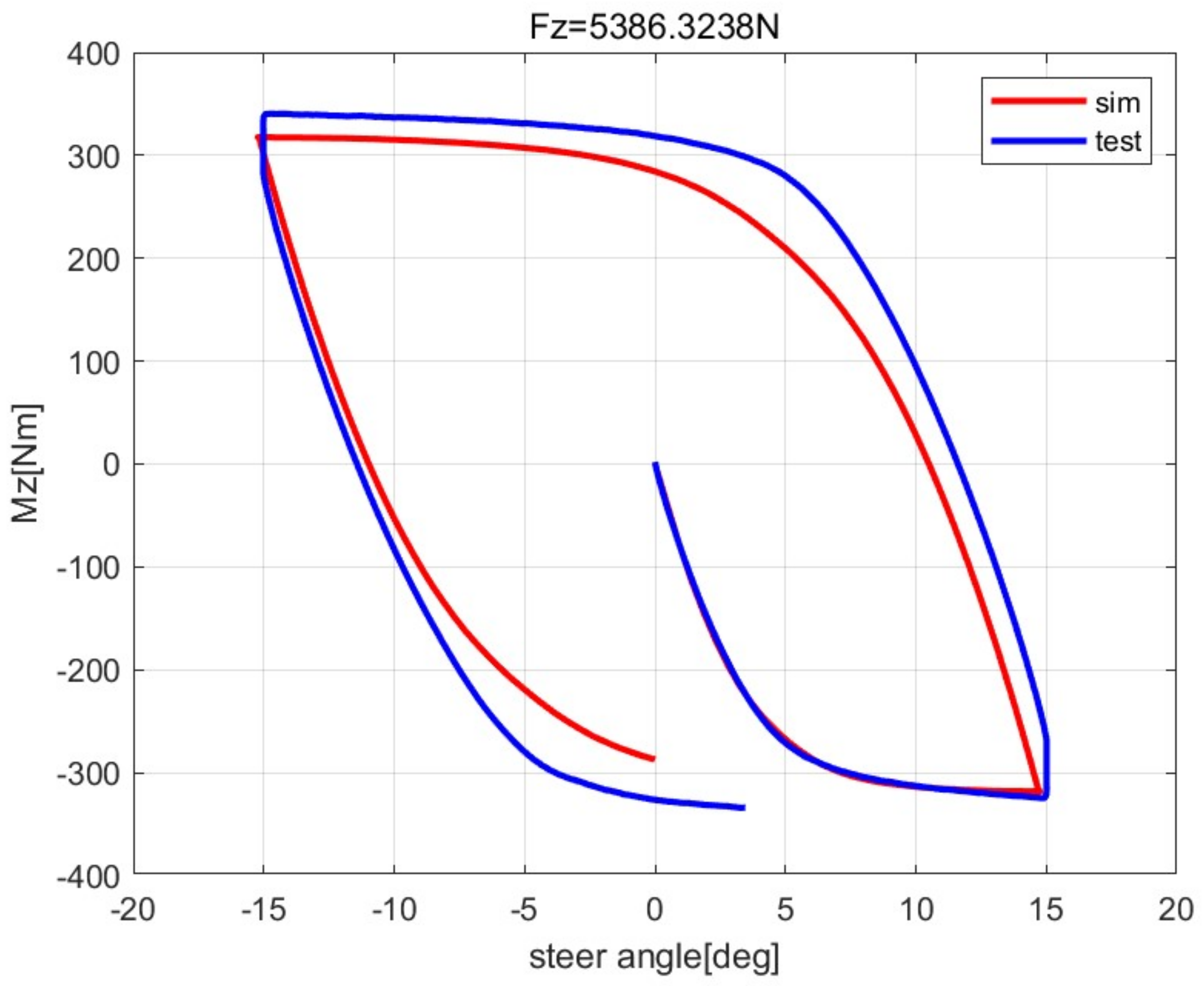
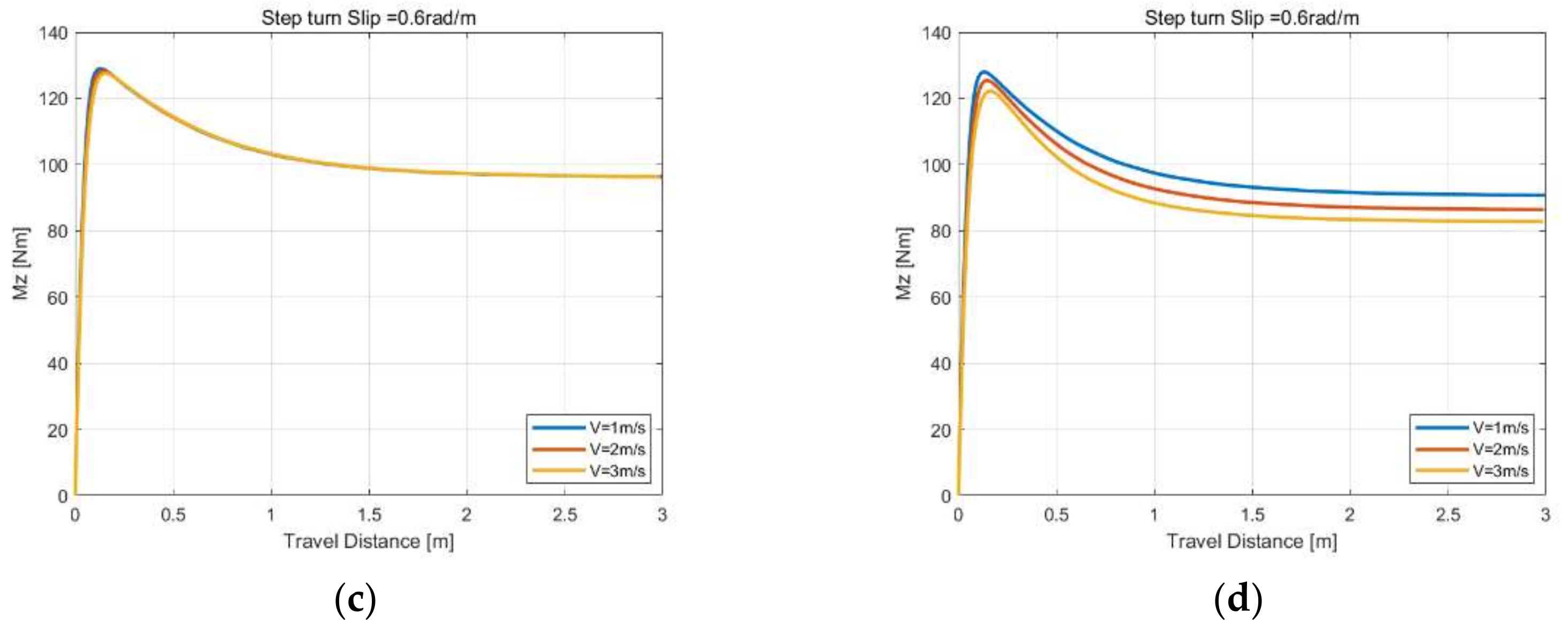
55] under different unsteady-state conditions, including the step side slip angle, sine side slip angle, load variations at constant side slip angle, step turn slip simulation, sine longitudinal combined with a constant side slip, sine turn combined with a constant side slip and load variations at constant longitudinal and side slip inputs. It shows that the simulation results have little difference by using the proposed method, but the reference method has a significant difference under turn slip or load variations inputs at different speed or, more precisely, the ratio between the distance of the contact patch center traveling in space within the time interval and distance between adjacent tread elements in the contact patch. However, this paper only studies the numerical solution method of the theoretical model in detail, and the results of the comparison between the model and the experiment show that a refined contact patch model considering camber and the influence of lateral force and longitudinal force on the contact patch model demonstrate the need for more in-depth research on the dynamic friction model, considering that the influences of contact pressure and slip velocity are added to the theoretical model.
The sections of this paper are arranged as follows. In
Section 2, the tire total deformation discrete solution method based on the Euler method will be given. In
Section 3, the modeling method of belt/carcass deformation, contact patch, stress direction in the sliding region and anisotropic of tread stiffness is described. In
Section 4, according to the adhesion and sliding region, the matrix equations for the calculation of force and torque are established, and the advantages and disadvantages of different iterative methods are compared. In
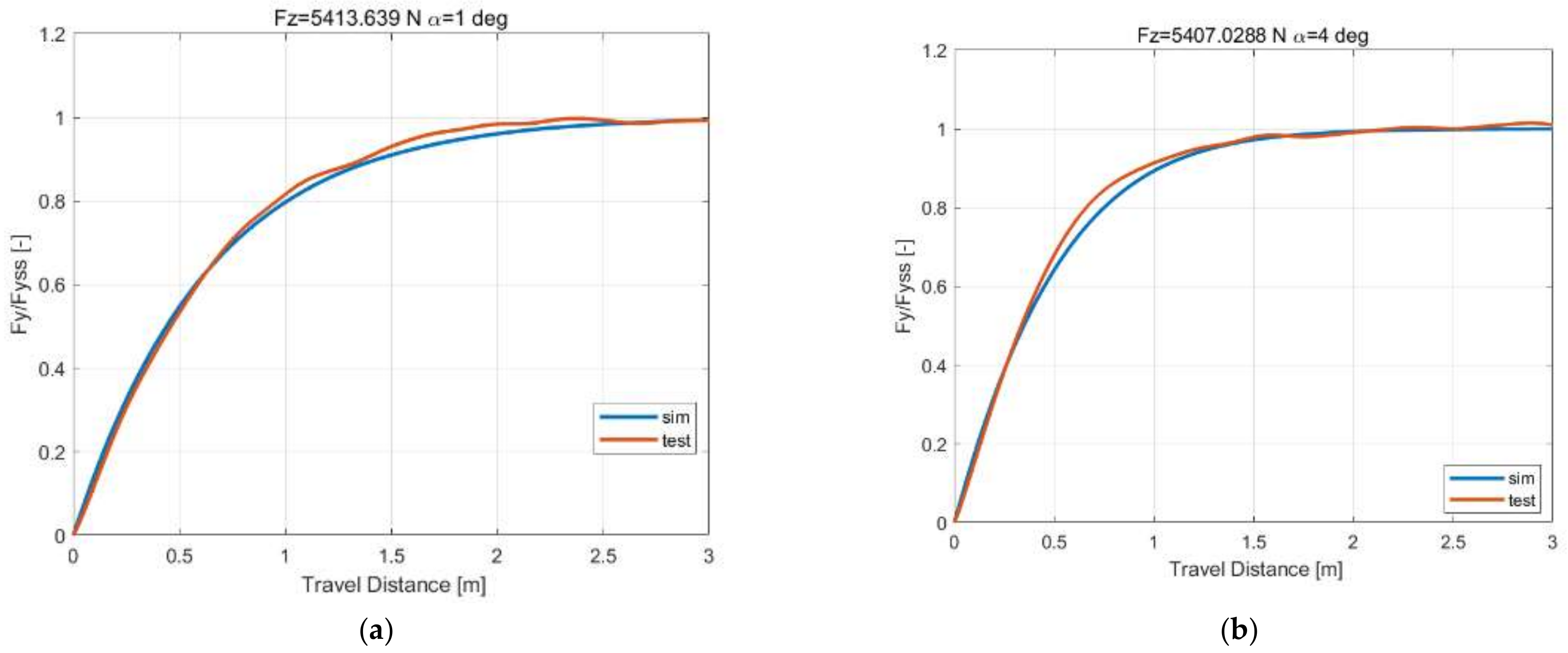
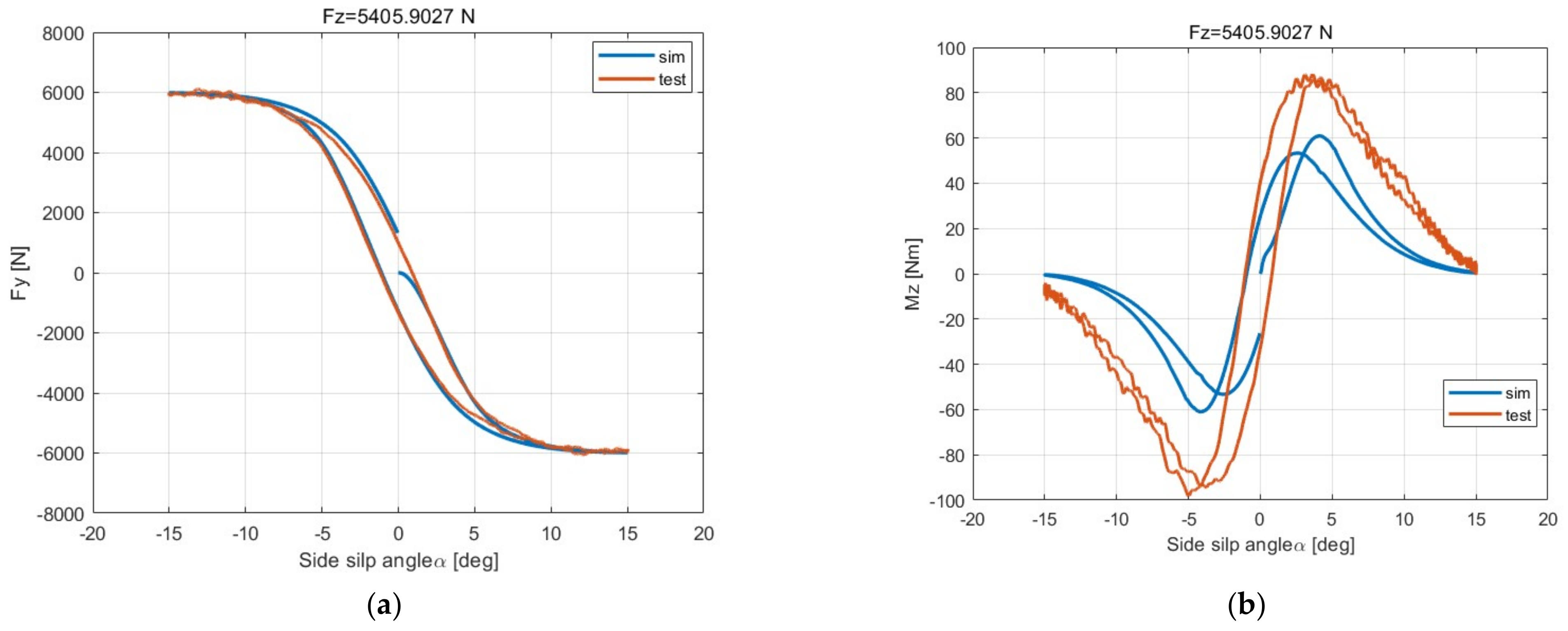
Section 5, the theoretical model is compared with the experiment to verify the rationality of the theoretical model parameters, and based on the principle that the unsteady state only depends on the path frequency, the discrete solution method proposed in this paper is compared with reference [
52,
53] unsteady-state conditions. Finally, the discussion and conclusions will be given in
Section 6.
2. Tire Total Deformation Discrete Solution Method Based on the Euler Method
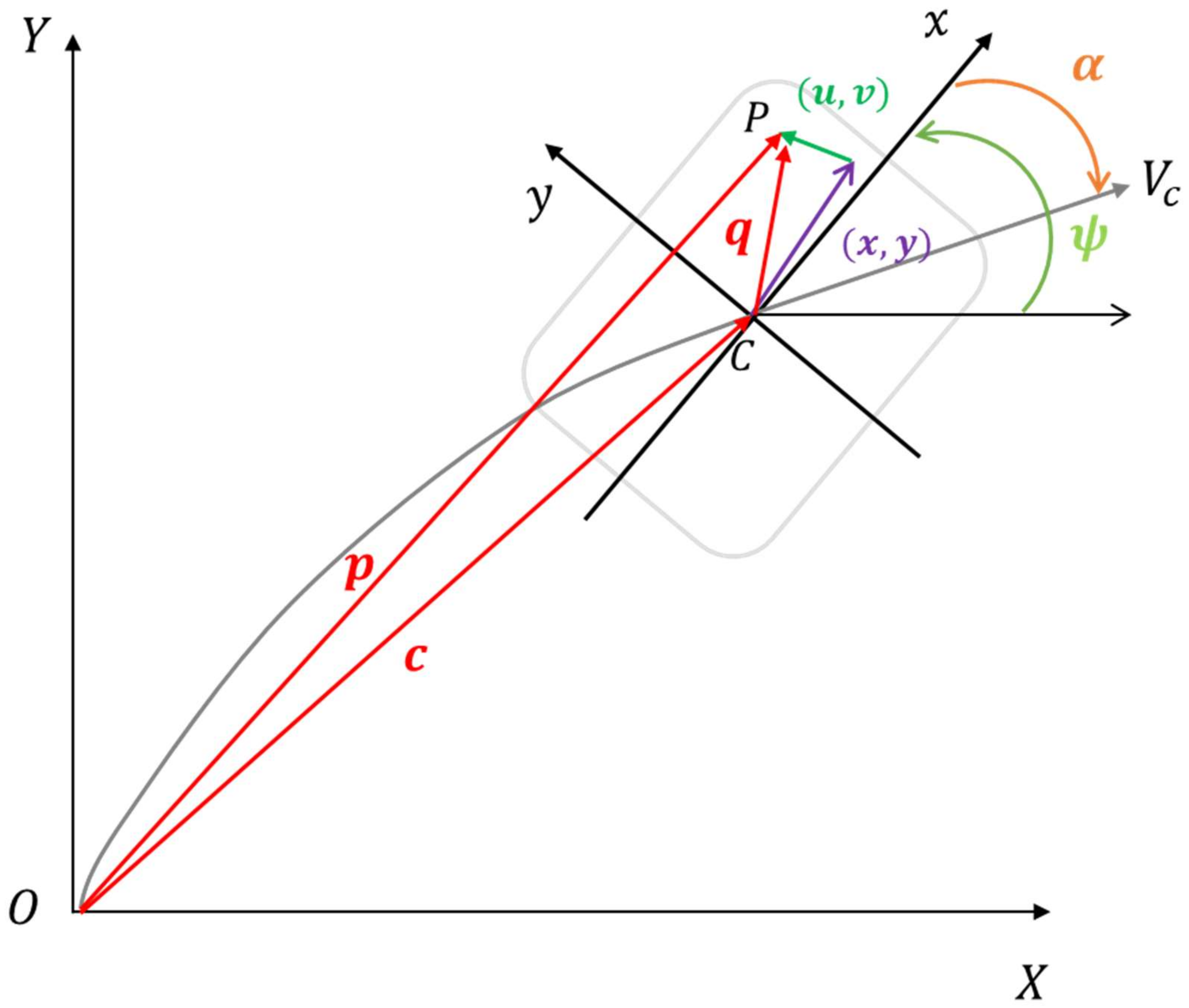
The total deformation of tires caused by friction consists of tread and carcass. When the tire deformation is described, two coordinate systems are used; one is the road coordinate system
and the other is the contact patch coordinate system
, named as
. When the tire slips relative to the road surface, the friction forces makes the tire deform
relative to the contact patch coordinates
, as shown in
Figure 1.
is the contact point at undeformed state and
is the vector of
relative to the
system.
represents the contact patch center and
is the vector
relative to the
system.
represents the contact point vector at undeformed state,
represents the total tire deformation vector and
is the vector of
relative to
.
represents the sideslip angle and
represents the yaw angle of the
-axis with respect to the
-axis.
The position of the tread location relative to
can be expressed as the equation:
Herein,
. So, there is the slip velocity of the tread relative to the road:
where
is the contact patch center velocity and
and
are the
base vector. When there is no relative slip between the tread and the road surface,
, then
Herein,
,
,
, expression of Equations (3) and (4) by the Euler method
Herein,
,
,
,
, and
is practical slip,
is side slip angle,
is the longitudinal theoretical slip,
is the lateral theoretical slip and
is the turn theoretical slip. Equations (7) and (8) are only related to the coordinates of the contact patch
and the space position of the contact patch center. The expression of Equations (7) and (8) in a discrete method:
According to Equations (9) and (10), there are tire total deformation:
Herein:
represents the distance between adjacent tread elements in the contact patch.
represents the distance of the contact patch center traveling in space within the time interval
.
If is set to zero, it can be transformed into a steady state.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}