
A Denoising Method of Micro-Turbine Acoustic Pressure Signal Based on CEEMDAN and Improved Variable Step-Size NLMS Algorithm


Abstract
:1. Introduction
2. Principles
2.1. CEEMDAN Algorithm
- Compared with EEMD and CEEMD, CEEMDAN has less computation and better decomposition effect;
- Theoretically, CEEMDAN can decompose all signals;
- CEEMDAN is self-adaptive and does not require a basis function.
2.2. Criteria for Screening IMFs
2.2.1. Cross-Correlation Coefficient
2.2.2. Continuous Mean Square Error Criterion
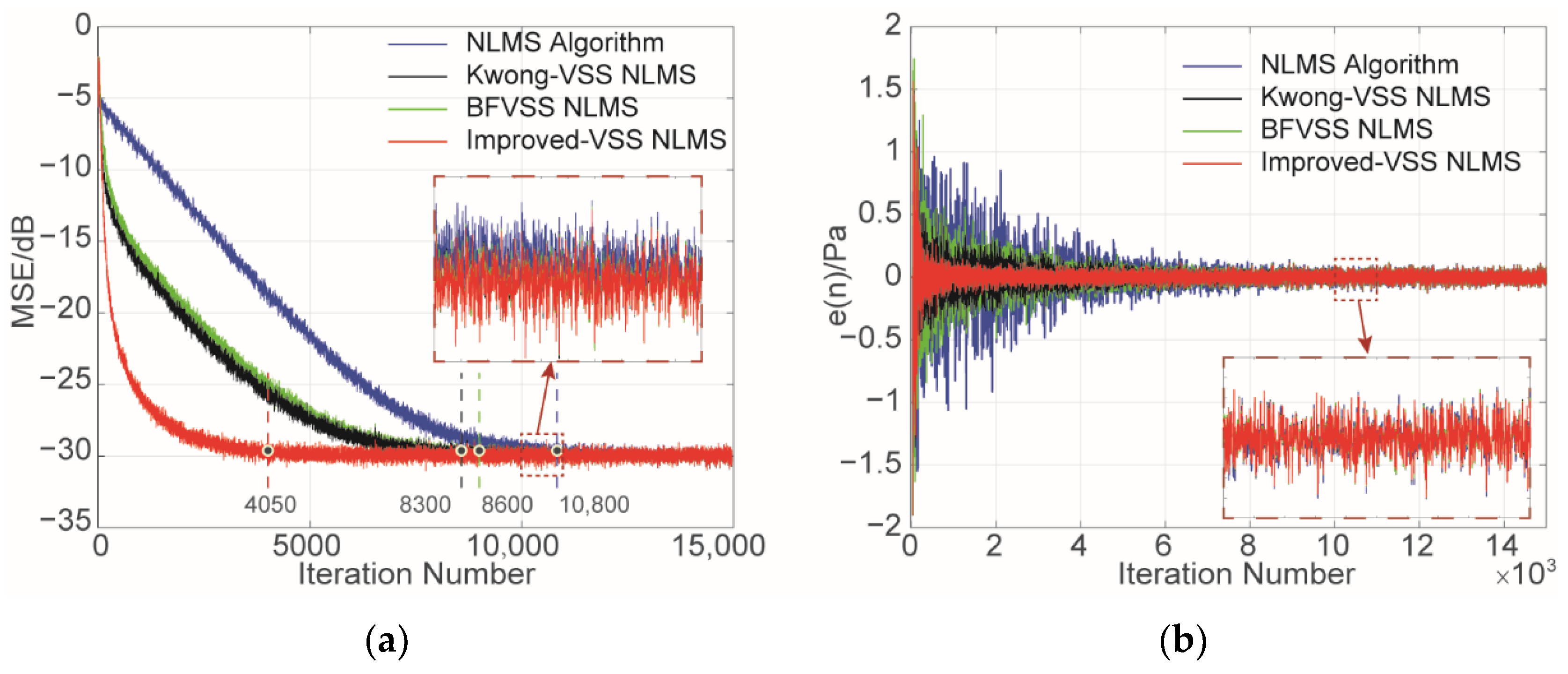
2.3. Improved Variable Step-Size NLMS Algorithm
2.3.1. Classical VSS-NLMS Algorithms
2.3.2. Improved VSSNLMS Algorithm
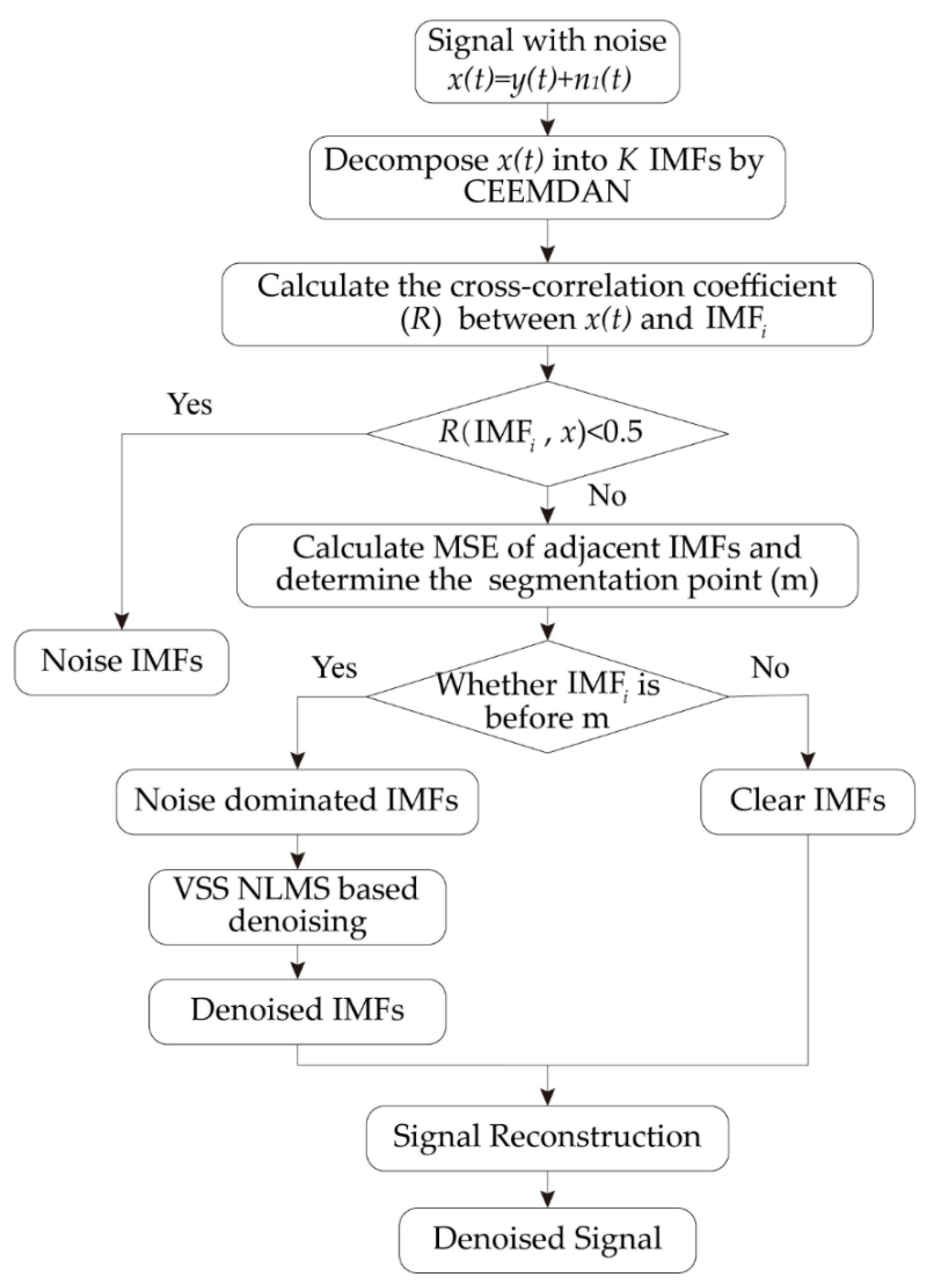
2.4. Denoising Method of Micro-Turbine Acoustic Pressure Signal
- The CEEMDAN algorithm is used to decompose the acoustic pressure signal into multiple IMFs;
- The cross-correlation coefficient between each IMF and the original signal with noise is calculated. If the correlation coefficient between and the original signal is less than 0.5, the is determined as the noise IMF, and the remaining IMFs will be screened for the next step;
- The mean square error of the adjacent IMF is calculated, and the segment point m is determined. The IMFs before the segment point are considered as the noise dominated IMFs, and the IMFs after the segment point are recognized as the clear IMFs;
- The VSS-NLMS algorithm is adopted to denoise the noise-dominated IMFs to obtain the denoised IMFs;
- The clear IMFs and the denoised IMFs are reconstructed to obtain the denoised acoustic pressure signal.
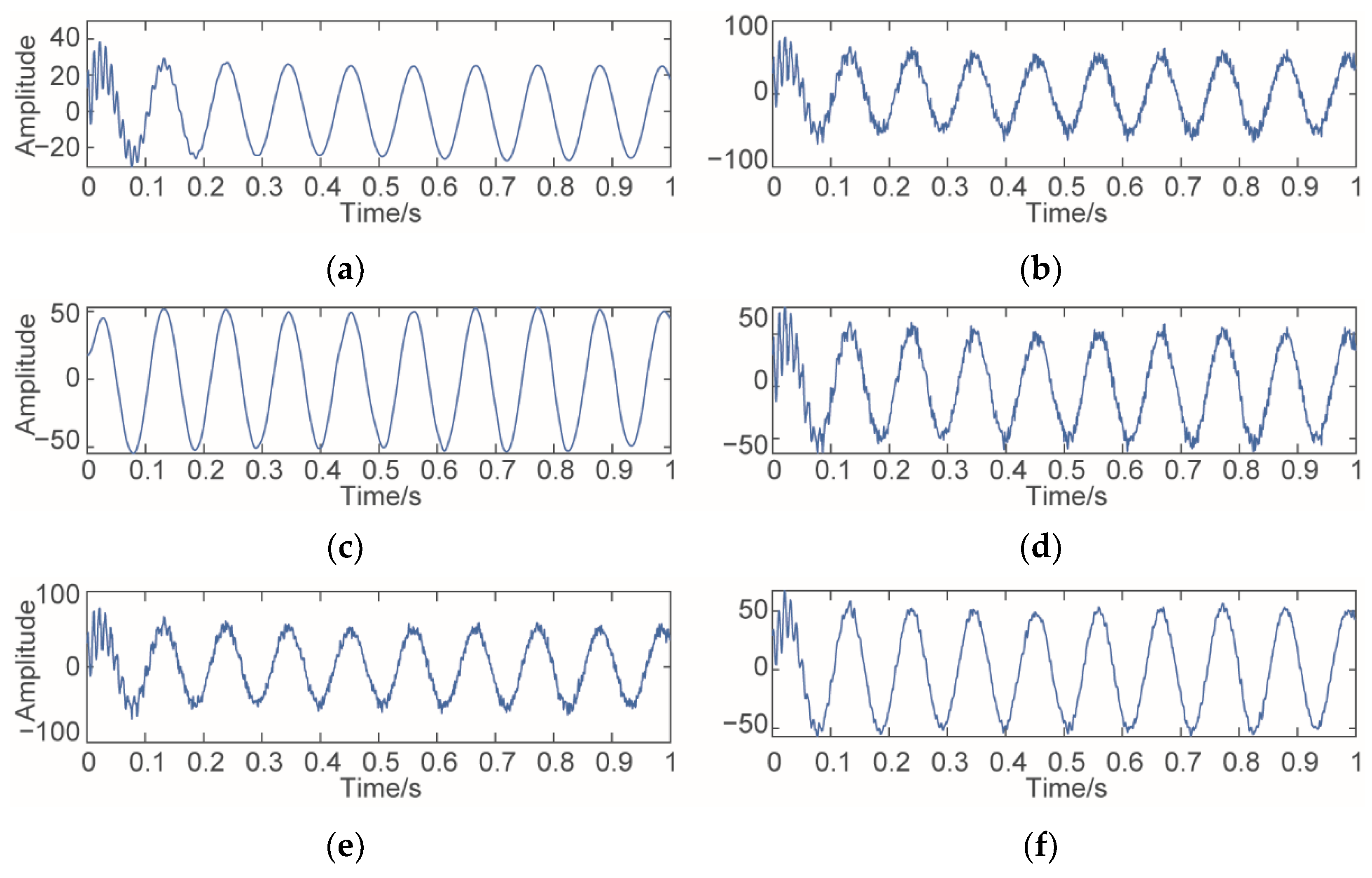
2.5. Simulation Signal Analysis
3. Investigation of the Micro-Turbine Acoustic Pressure Signal
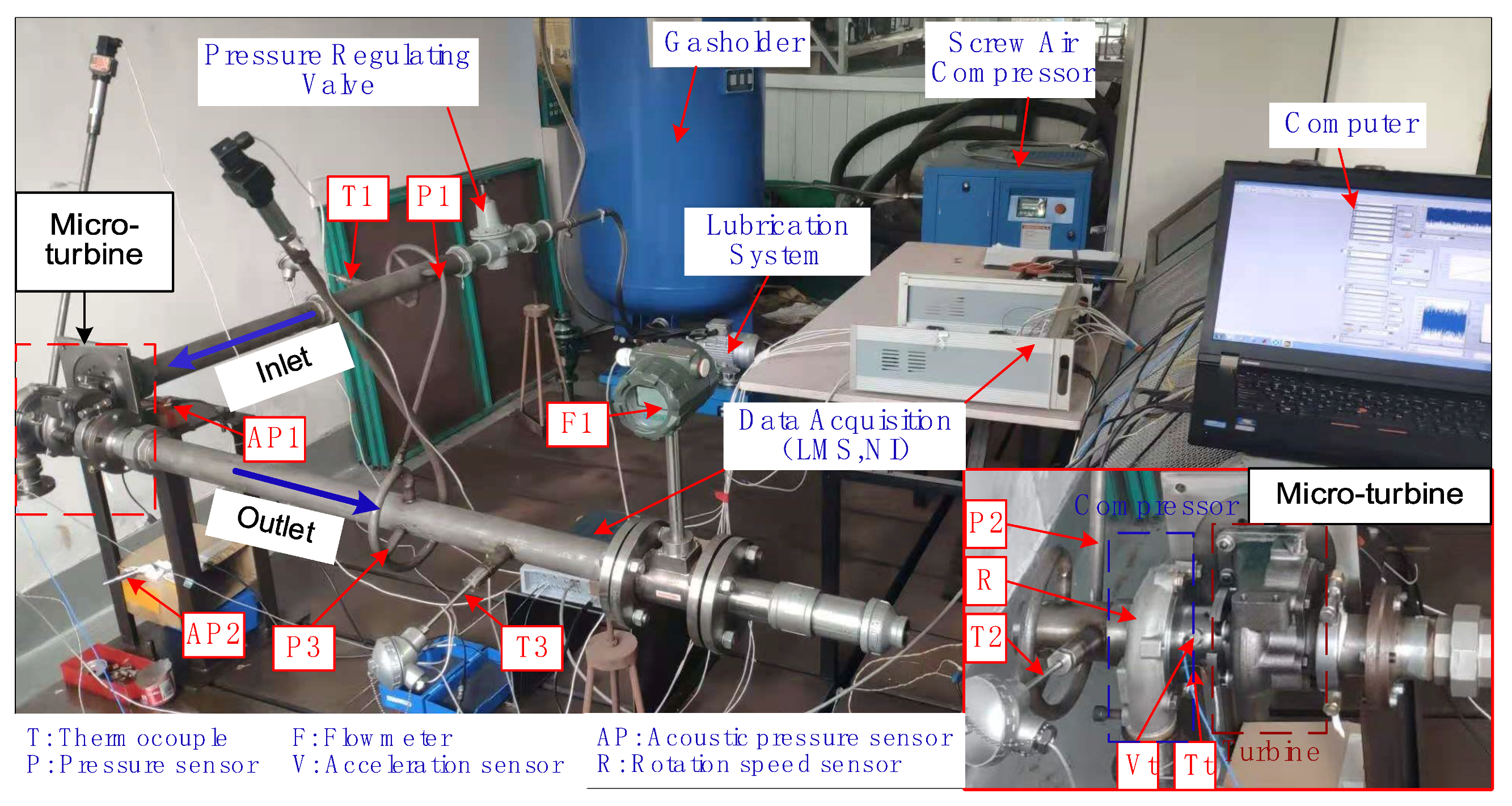
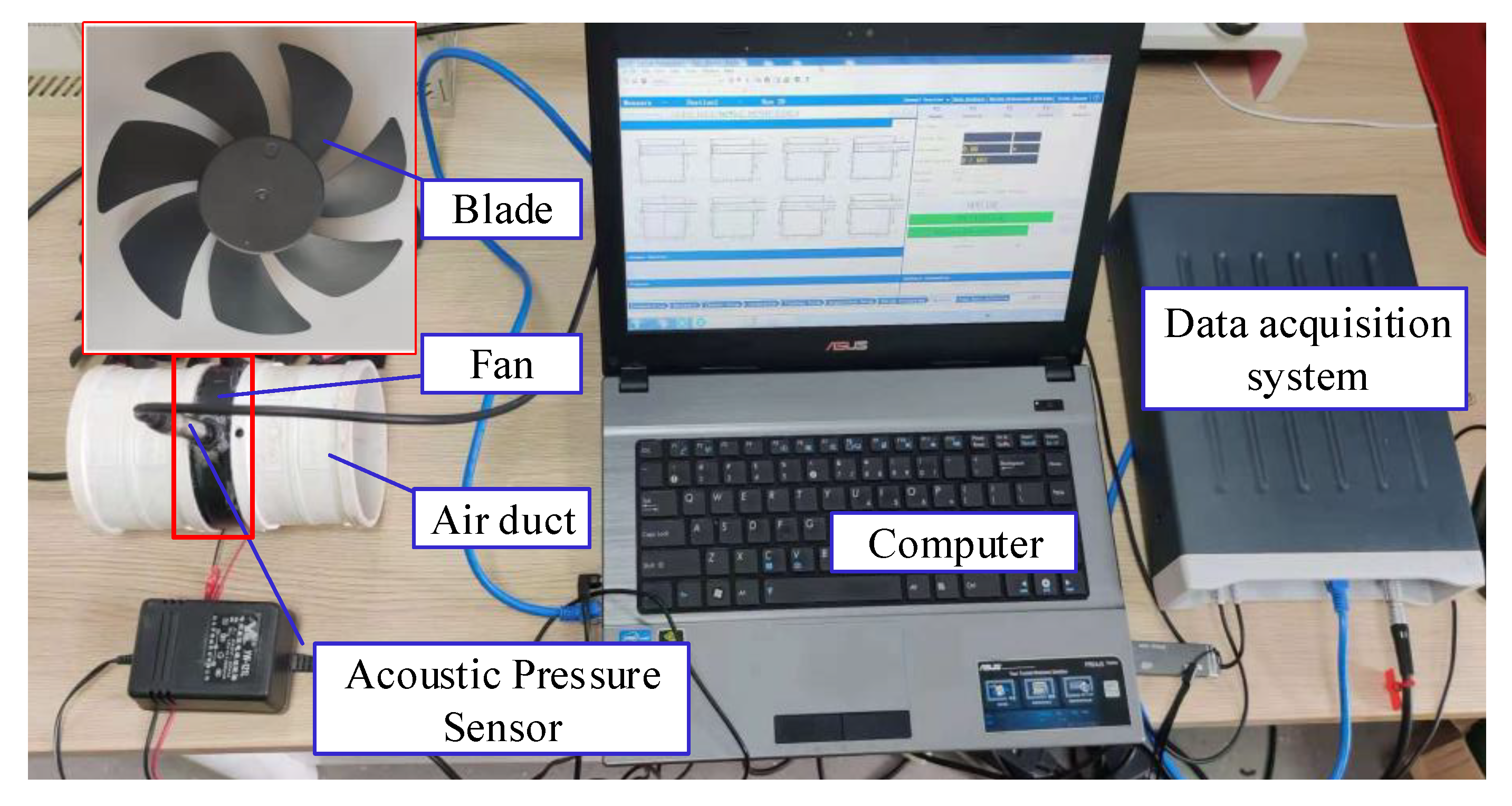
3.1. Test Setup
3.2. Ideal Acoustic Pressure Signal
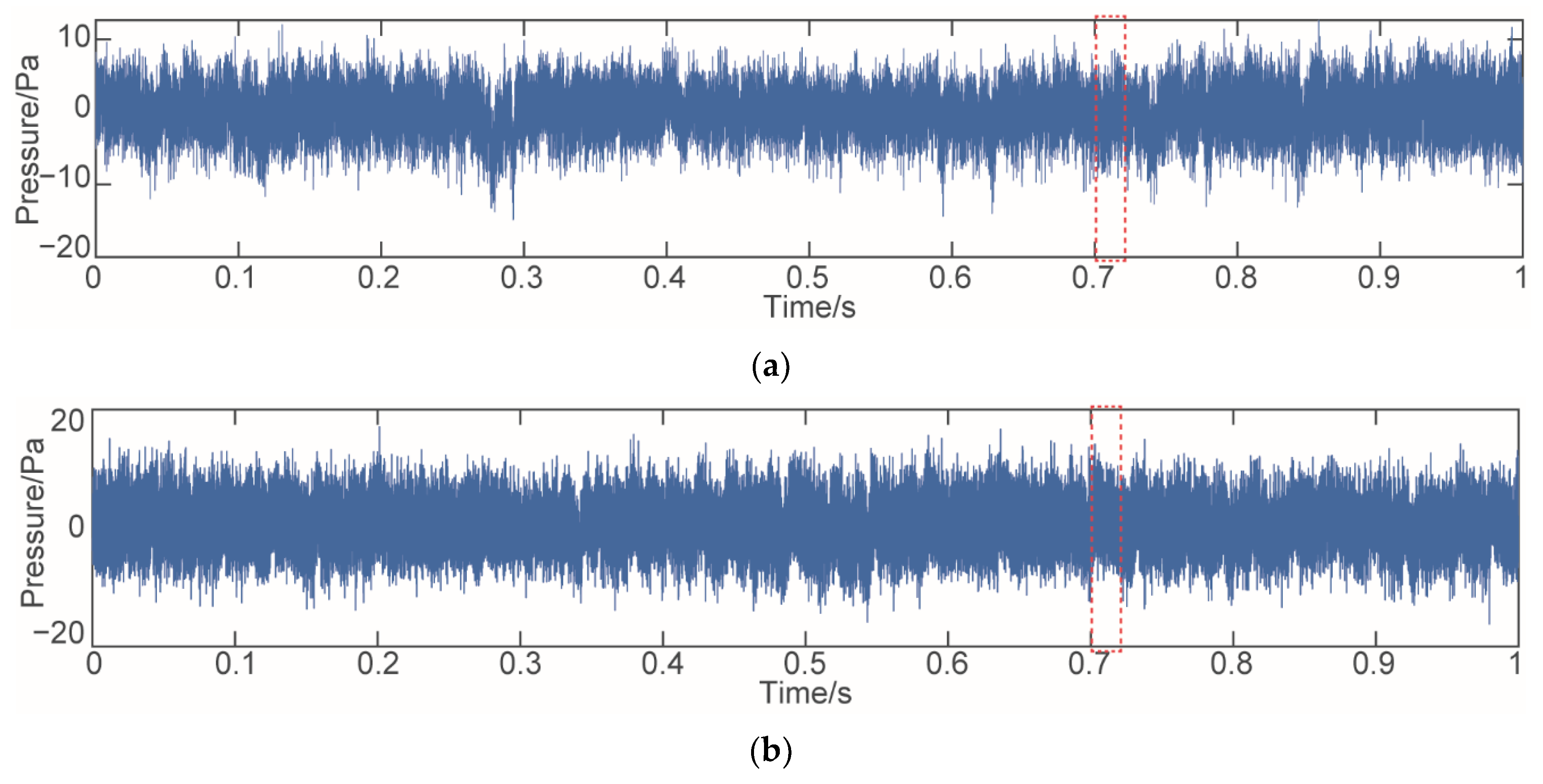
3.3. Acoustic Pressure Signal Generated by Normal Turbine Blades
4. Denoising of the Normal Acoustic Pressure Signal
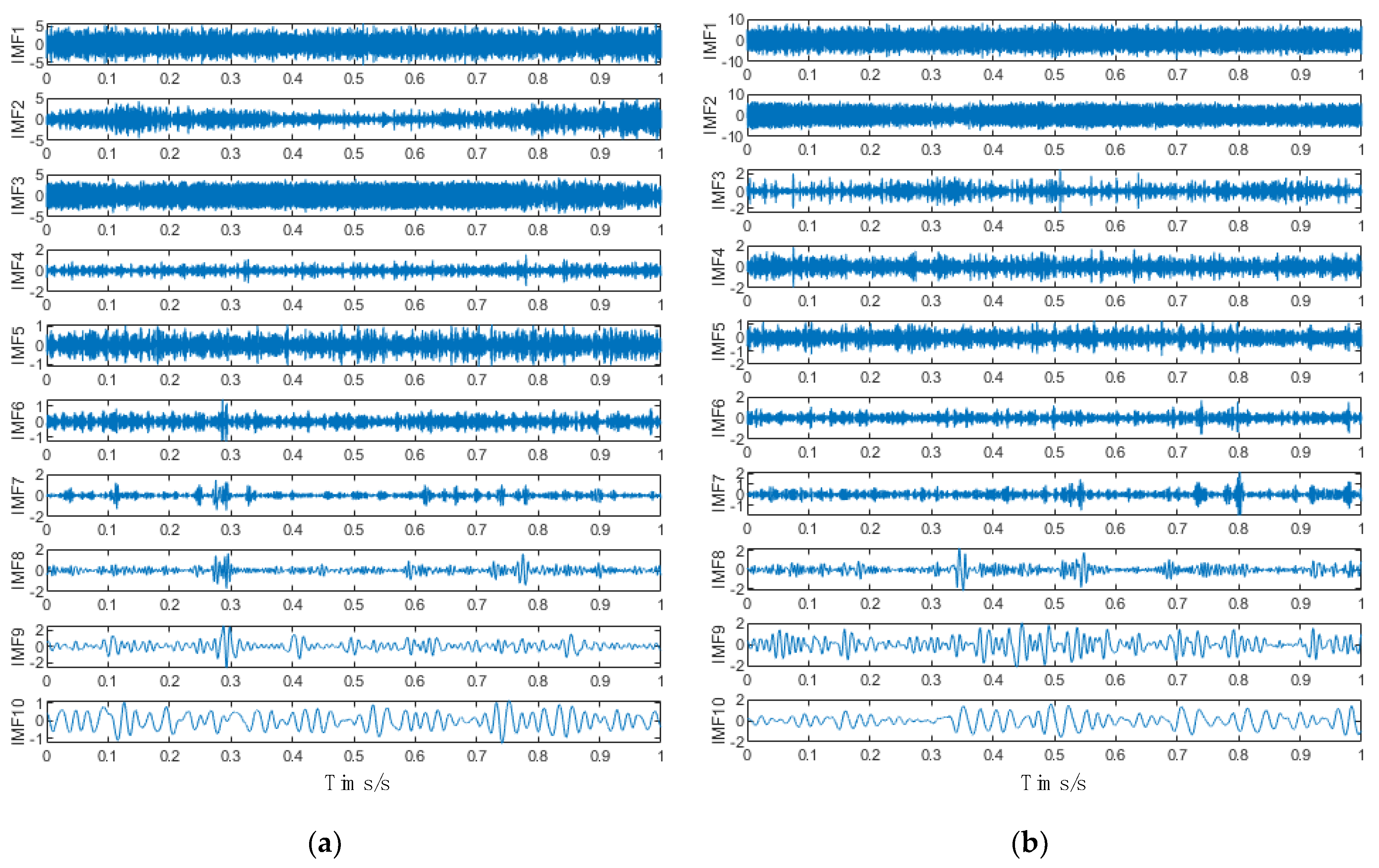
4.1. CEEMDAN Decomposition of the Normal Acoustic Pressure Signal
4.2. Screening of IMFs
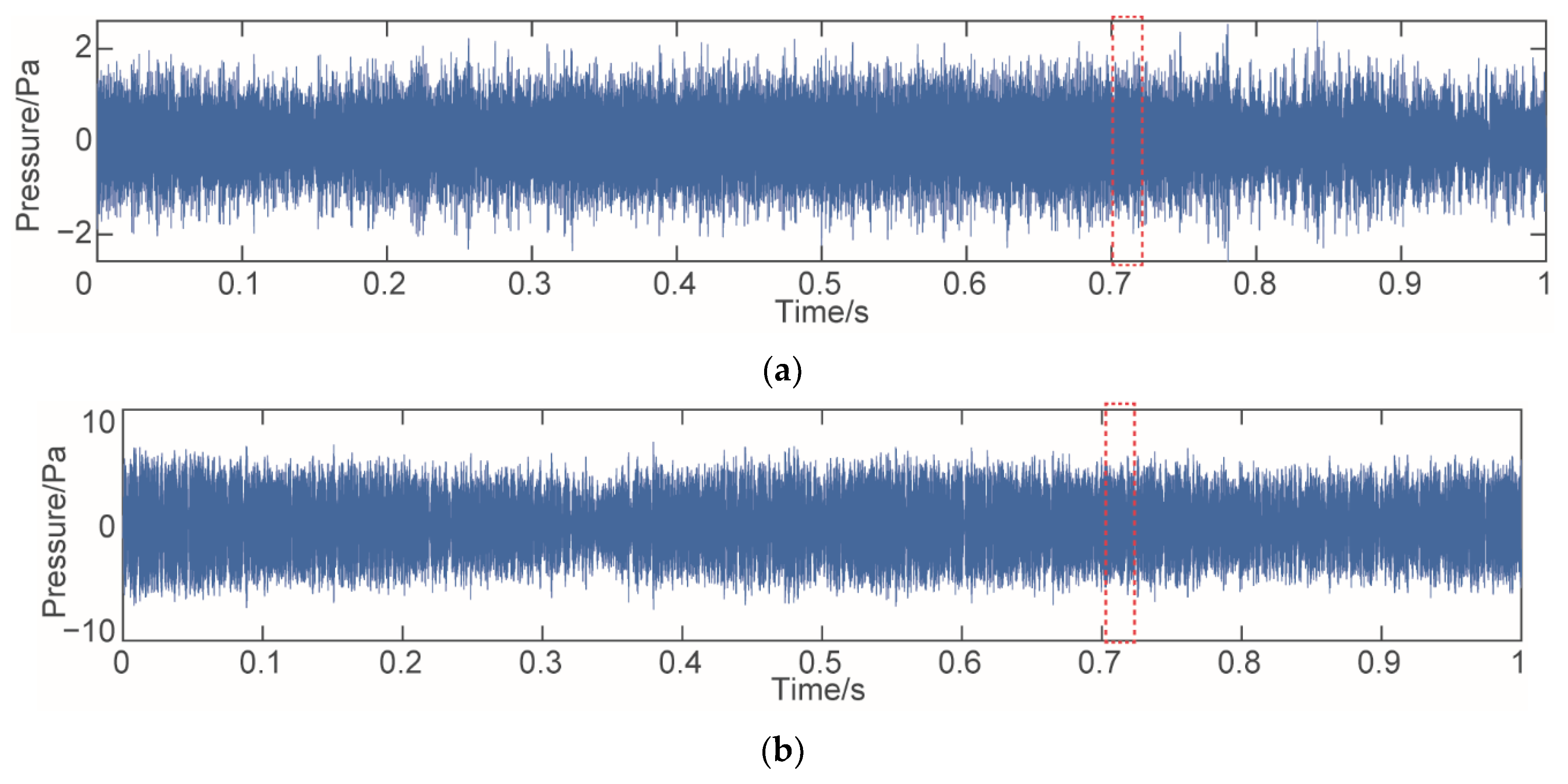
4.3. Denoising and Reconstruction of the Normal Acoustic Pressure Signal
4.4. Analysis of Denoising Results of Different Denoising Methods
5. Denoising of Fractured Turbine Acoustic Pressure Signal
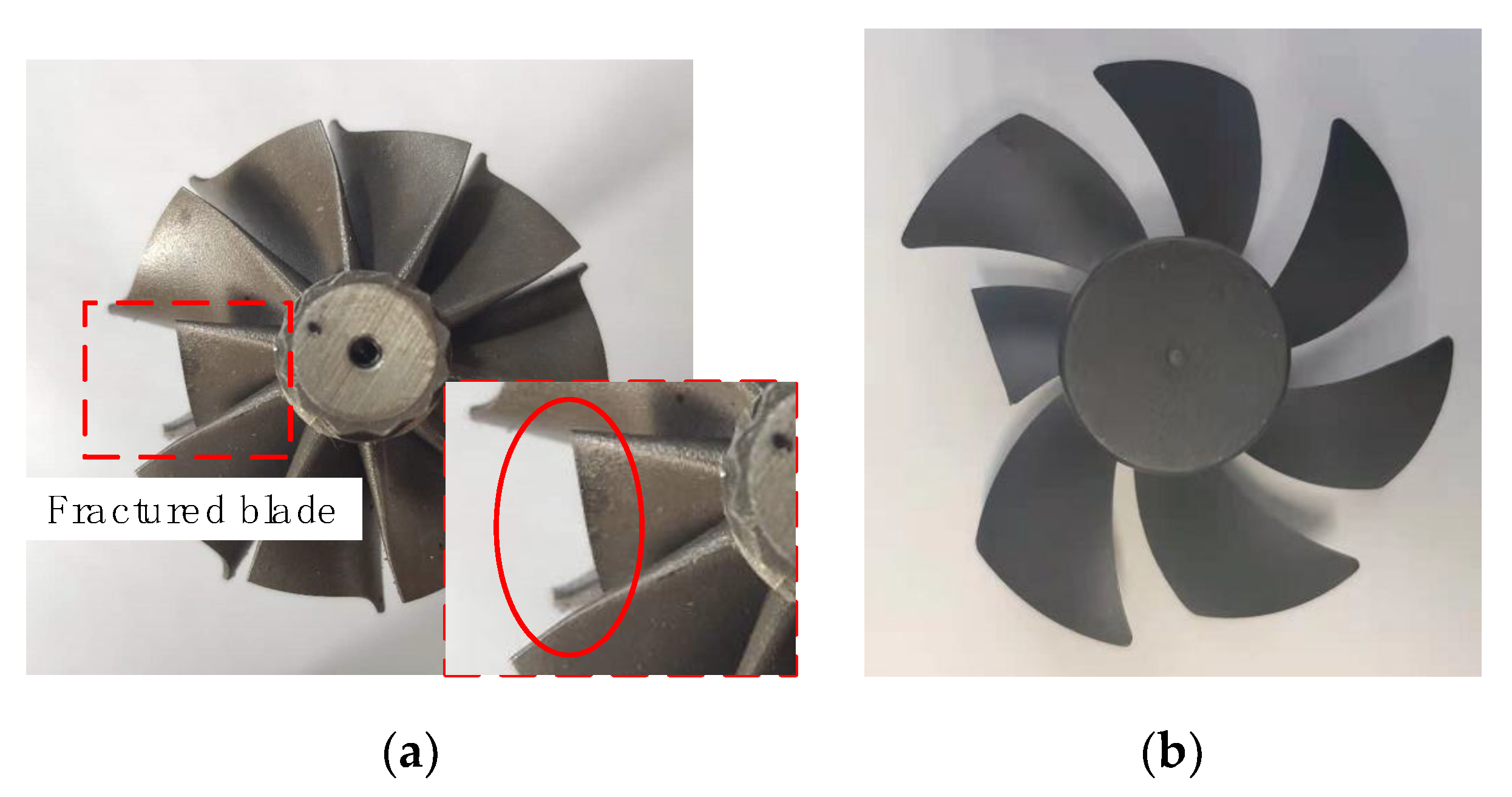
5.1. Acoustic Pressure Signal of Fractured Turbine
5.2. Denoising of Fractured Turbine Acoustic Pressure Signal
6. Conclusions
- This paper proposed an improved VSS-NLMS algorithm based on actual error value, which can effectively improve the shortcomings of the existing VSS-NLMS algorithm. The results show that the improved algorithm has a fast convergence speed, small steady-state error, simple parameter adjustment, and small calculation amount, which has good engineering practical value.
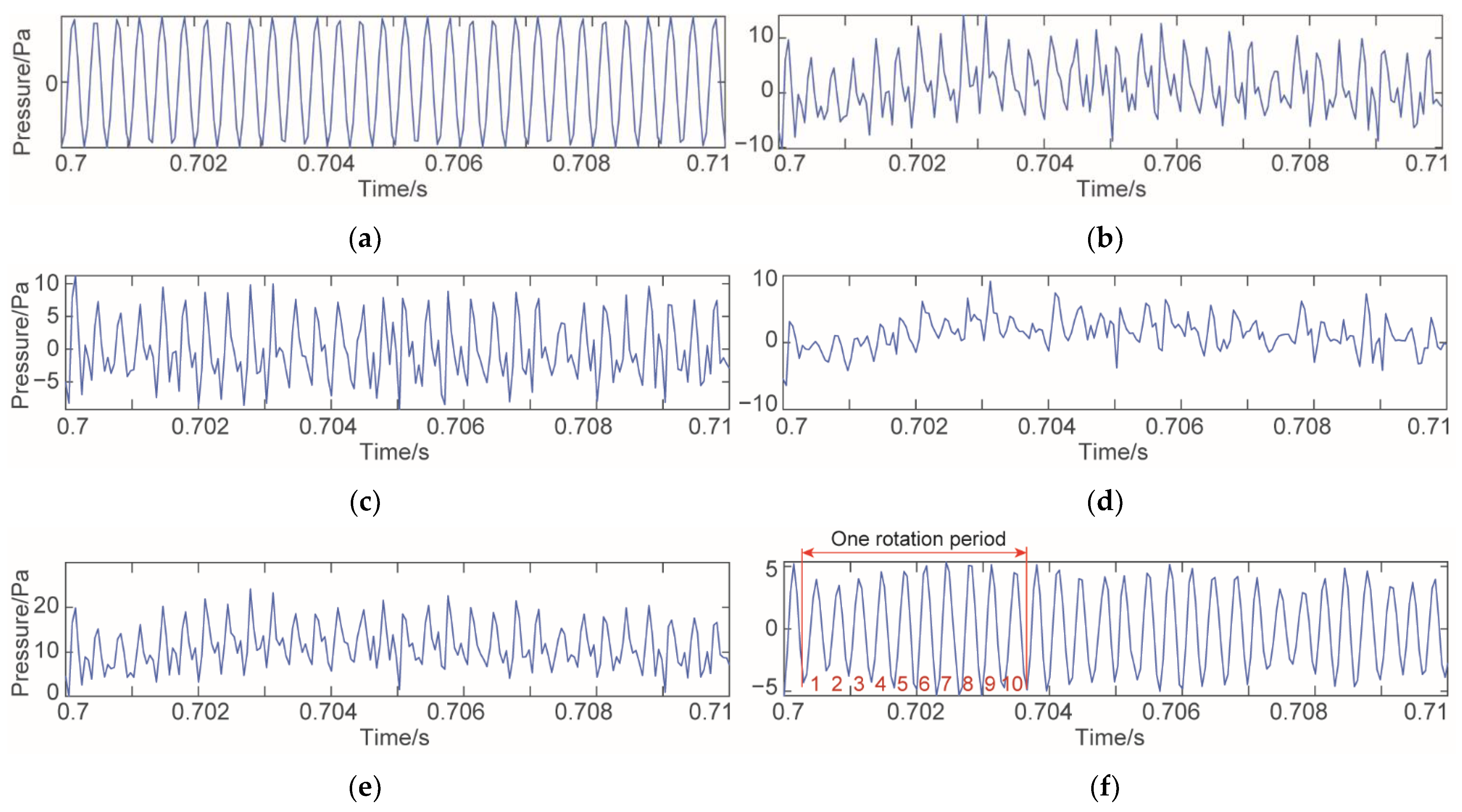
- The proposed denoising method is used to denoise the turbine acoustic pressure signal obtained under actual working conditions and compare it with the ideal acoustic pressure signal. The results show that the time-domain waveform after denoising is relatively smooth, and the acoustic pressure change caused by the rotation of each blade is clear, which is close to the ideal acoustic pressure curve.
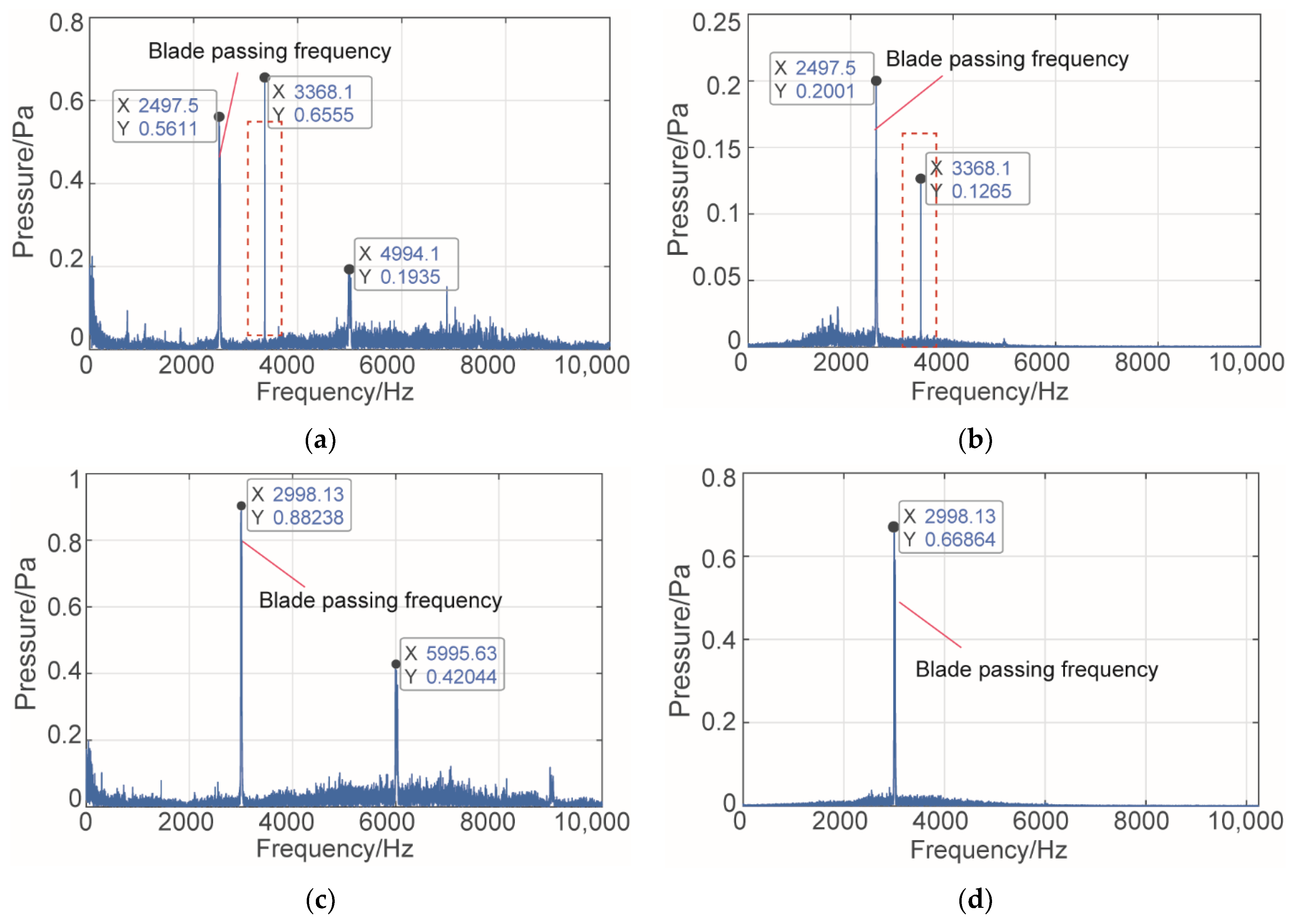
- A signal with a frequency of 3368 Hz is added to the normal acoustic pressure signal to verify the effectiveness of the denoising method proposed in retaining important signals. The results show that, in the frequency domain response of the denoised signal, in addition to the blade passing frequency, the signal characteristic with the added frequency of 3368 Hz is maintained.
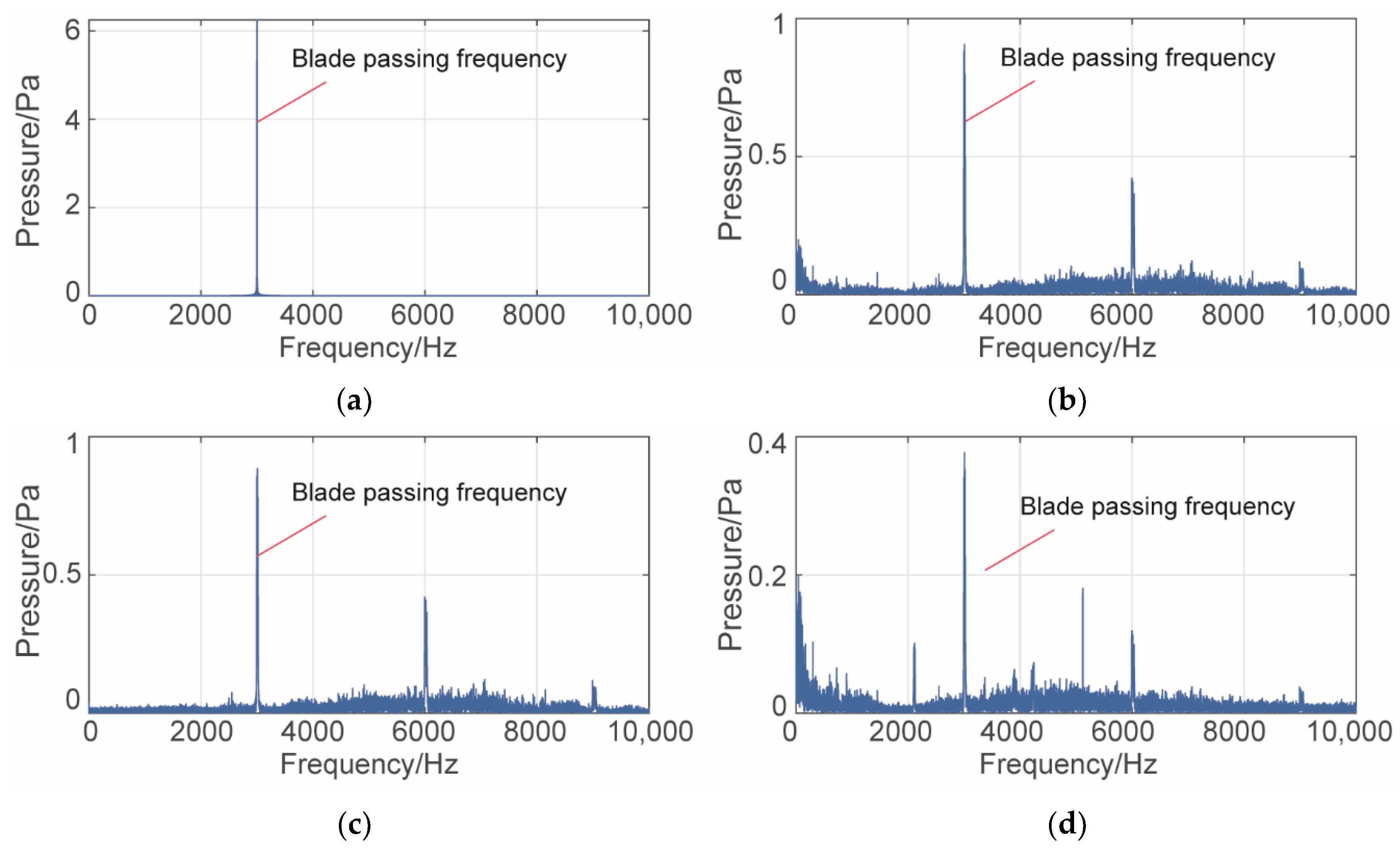
- The acoustic pressure signal of the fractured turbine is denoised and compared with the ideal state. The results show that in the time domain response curve of the denoised signal, the amplitude loss caused by blade fracture is very obvious, and the amplitudes produced by the other blades are neat. In the frequency domain curve, not only is the blade passing frequency (Fundamental 1) retained, but the Fundamental 2 and its harmonic frequency caused by the fractured blade can also be seen.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. CEEMDAN Algorithm
- The same as the EEMD algorithm, the white Gaussian noise signals are added to the original signal to obtain . The first-order IMFs () obtained by times EMD decomposition are:where is the white Gaussian noise signal added for the ith time, ; is the standard deviation of white noise, or 2 to ensure that positive and negative white noises are added in pairs; and is the first residual quantity.
- 2.
- The white noises after EMD decomposition are superimposed into to form a new signal (), and then is obtained after times of decomposition:
- 3.
- Steps (1) and (2) are repeated to obtain :
- 4.
- When the number of extreme points of is less than 2, the final residual is obtained in the whole CEEMDAN decomposition process; that is, the original signal can be expressed as:
References
- Marcellan, A. An Exploration into the Potential of Microturbine Based Propulsion Systems for Civil Unmanned Aerial Vehicles. Master of Science Thesis, Delft University of Technology, Delft, Holland, 2015. [Google Scholar]
- Rist, J.F.; Dias, M.F.; Palman, M.; Zelazo, D.; Cukurel, B. Economic dispatch of a single micro-gas turbine under CHP operation. Appl. Energy 2017, 200, 1–18. [Google Scholar] [CrossRef]
- Madhavan, S.; Jain, R.; Sujatha, C.; Sekhar, A.S. Vibration based damage detection of rotor blades in a gas turbine engine. Eng. Fail. Anal. 2014, 46, 26–39. [Google Scholar] [CrossRef]
- Toh, G.; Park, J. Review of vibration-based structural health monitoring using deep learning. Appl. Sci. 2020, 10, 1680. [Google Scholar] [CrossRef]
- Bhowmik, B.; Tripura, T.; Hazra, B.; Pakrashi, V. First-order eigen-perturbation techniques for real-time damage detection of vibrating systems: Theory and applications. Appl. Mech. Rev. 2019, 71, 060801. [Google Scholar] [CrossRef]
- Baboli, P.T.; Babazadeh, D.; Raeiszadeh, A.; Horodyvskyy, S.; Koprek, I. Optimal temperature-based condition monitoring system for wind turbines. Infrastructures 2021, 6, 50. [Google Scholar] [CrossRef]
- Zhang, J.; Li, N.; Chen, Y.; Han, Q.; Hou, Z. A method of in-situ monitoring multiple parameters and blade condition of turbomachinery by using a single acoustic pressure sensor. Mech. Syst. Signal Process. 2022, 173, 109051. [Google Scholar] [CrossRef]
- Cui, P.; Wang, J.; Li, X.; Li, C. Sub-Health Identification of Reciprocating Machinery Based on Sound Feature and OOD Detection. Machines 2021, 9, 179. [Google Scholar] [CrossRef]
- Ahmed, U.; Ali, F.; Jennions, I. A review of aircraft auxiliary power unit faults, diagnostics and acoustic measurements. Prog. Aeosp. Sci. 2021, 124, 100721. [Google Scholar] [CrossRef]
- Chiementin, X.; Kilundu, B.; Rasolofondraibe, L.; Crequy, S.; Pottier, B. Performance of wavelet denoising in vibration analysis: Highlighting. J. Vib. Control 2012, 18, 850–858. [Google Scholar] [CrossRef]
- Shaghaghi, M.; Kahaei, M.H.; Poshtan, J. Resonance-based vibration signal denoising using wavelet packet decomposition. Fluct. Noise Lett. 2007, 7, 257–262. [Google Scholar] [CrossRef]
- Bonda, A.G.Y.; Nanda, B.K.; Jonnalagadda, S. Vibration signature based stability studies in internal turning with a wavelet denoising preprocessor. Measurement 2020, 154, 107520. [Google Scholar] [CrossRef]
- Beale, C.; Niezrecki, C.; Inalpolat, M. An adaptive wavelet packet denoising algorithm for enhanced active acoustic damage detection from wind turbine blades. Mech. Syst. Signal Process. 2020, 142, 106754. [Google Scholar] [CrossRef]
- Sendur, L.; Selesnick, I.W. Bivariate shrinkage functions for wavelet-based denoising exploiting interscale dependency. IEEE Trans. Signal Process. 2002, 50, 2744–2756. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Rao, P.; Chen, X.; Xia, H.; Zhang, S. Denoising and Feature Extraction for Space Infrared Dim Target Recognition Utilizing Optimal VMD and Dual-Band Thermometry. Machines 2022, 10, 168. [Google Scholar] [CrossRef]
- Vautard, R.; Ghil, M. Singular spectrum analysis in nonlinear dynamics, with applications to paleoclimatic time series. Phys. D 1989, 35, 395–424. [Google Scholar] [CrossRef]
- Alexandrov, T. A method of trend extraction using singular spectrum analysis. REVSTAT-Stat. J. 2012, 7, 1–22. [Google Scholar]
- Traore, O.I.; Pantera, L.; Favretto-Cristini, N.; Cristini, P.; Viguier-Pla, S.; Vieu, P. Structure analysis and denoising using singular spectrum analysis: Application to acoustic emission signals from nuclear safety experiments. Measurement 2017, 104, 78–88. [Google Scholar] [CrossRef]
- Cui, Z.; Cui, X.P. Selection of Optimal Decomposition Layer for Thresholding Denoising Using Singular Spectrum Analysis and Wavelet Entropy. Int. J. Multimed. Ubiquit. Eng. 2016, 11, 373–380. [Google Scholar] [CrossRef]
- Lin, P.; Kuang, W.; Liu, Y.; Ling, B.W.-K. Grouping and selecting singular spectrum analysis components for denoising via empirical mode decomposition approach. Circuits Syst. Signal Process. 2019, 38, 356–370. [Google Scholar] [CrossRef]
- Guo, C.; Wen, Y.; Li, P.; Wen, J. Adaptive noise cancellation based on EMD in water-supply pipeline leak detection. Measurement 2016, 79, 188–197. [Google Scholar] [CrossRef]
- Kumar, S.; Panigrahy, D.; Sahu, P.K. Denoising of Electrocardiogram (ECG) signal by using empirical mode decomposition (EMD) with non-local mean (NLM) technique. Biocybern. Biomed. Eng. 2018, 38, 297–312. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, Z.; Miao, Q.; Wang, L. An optimized time varying filtering based empirical mode decomposition method with grey wolf optimizer for machinery fault diagnosis. J. Sound Vib. 2018, 418, 55–78. [Google Scholar] [CrossRef]
- Altuve, M.; Suárez, L.; Ardila, J. Fundamental heart sounds analysis using improved complete ensemble EMD with adaptive noise. Biocybern. Biomed. Eng. 2020, 40, 426–439. [Google Scholar] [CrossRef]
- Jia, Y.; Li, G.; Dong, X.; He, K. A novel denoising method for vibration signal of hob spindle based on EEMD and grey theory. Measurement 2021, 169, 108490. [Google Scholar] [CrossRef]
- Yang, W.; Court, R.; Tavner, P.J.; Crabtree, C.J. Bivariate empirical mode decomposition and its contribution to wind turbine condition monitoring. J. Sound Vib. 2011, 330, 3766–3782. [Google Scholar] [CrossRef]
- Wang, X.; Liu, C.; Bi, F.; Bi, X.; Shao, K. Fault diagnosis of diesel engine based on adaptive wavelet packets and EEMD-fractal dimension. Mech. Syst. Signal Process. 2013, 41, 581–597. [Google Scholar] [CrossRef]
- Wang, P.; Lee, C.M. Fault diagnosis of a helical gearbox based on an adaptive empirical wavelet transform in combination with a spectral subtraction method. Appl. Sci. 2019, 9, 1696. [Google Scholar] [CrossRef] [Green Version]
- Kaur, C.; Bisht, A.; Singh, P.; Joshi, G. EEG Signal denoising using hybrid approach of Variational Mode Decomposition and wavelets for depression. Biomed. Signal Process. Control 2021, 65, 102337. [Google Scholar] [CrossRef]
- Murugan, S.S.; Natarajan, V.; Kumar, R.R.; Balagayathri, K. Analysis and SNR comparision of various adaptive algorithms to denoise the wind driven ambient noise in shallow water. In Proceedings of the 2011 Annual IEEE India Conference, Hyderabad, India, 16–18 December 2011. [Google Scholar]
- Rusu, A.G.; Paleologu, C.; Benesty, J.; Ciochină, S. A Variable Step Size Normalized Least-Mean-Square Algorithm Based on Data Reuse. Algorithms 2022, 15, 111. [Google Scholar] [CrossRef]
- Mayyas, K.; AbuSeba, H.A. A new variable length NLMS adaptive algorithm. Digit. Signal Process. 2014, 34, 82–91. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y. Norm penalized joint-optimization NLMS algorithms for broadband sparse adaptive channel estimation. Symmetry 2017, 9, 133. [Google Scholar] [CrossRef] [Green Version]
- Hassani, I.; Arezki, M.; Benallal, A. A novel set membership fast NLMS algorithm for acoustic echo cancellation. Appl. Acoust. 2020, 163, 107210. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing, Prague, Czech Republic, 22–27 May 2011. [Google Scholar]
- Podobnik, B.; Stanley, H.E. Detrended cross-correlation analysis: A new method for analyzing two nonstationary time series. Phys. Rev. Lett. 2008, 100, 084102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, D. Multivariate Statistical Analysis and SPSS Application, 2nd ed.; East China University of Science and Technology Press: Shanghai, China, 2018. (In Chinese) [Google Scholar]
- Boudraa, A.O.; Cexus, J.C. EMD-based signal filtering. IEEE Trans. Instrum. Meas. 2007, 56, 2196–2202. [Google Scholar] [CrossRef]
- Kwong, R.H.; Johnston, E.W. A variable step size LMS algorithm. IEEE Trans. Signal Process. 1992, 40, 1633–1642. [Google Scholar] [CrossRef] [Green Version]
- Hamidia, M.; Amrouche, A. Improved variable step-size NLMS adaptive filtering algorithm for acoustic echo cancellation. Digit. Signal Process. 2016, 49, 44–55. [Google Scholar] [CrossRef]
- Aksoy, L.; Gunes, E.O.; Flores, P. An exact breadth-first search algorithm for the multiple constant multiplications problem. In Proceedings of the IEEE 2008 NORCHIP, Tallin, Estonia, 16–17 November 2008. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | CEEMDAN | Wavelet Threshold | SSA | Proposed Method |
|---|---|---|---|---|
| RMSE | 18.2156 | 18.8043 | 18.8940 | 18.0935 |
| SNR | 0.1040 | −0.1723 | −0.2136 | 0.1624 |
| NCC | 0.9883 | 0.9927 | 0.9922 | 0.9951 |
| R(1) | R(2) | R(3) | R(4) | R(5) | R(6) | R(7) | R(8) | R(9) | R(10) | |
|---|---|---|---|---|---|---|---|---|---|---|
| 15,000 r/min | 0.603 | 0.676 | 0.715 | 0.273 | 0.101 | 0.089 | 0.099 | 0.133 | 0.183 | 0.185 |
| 18,000 r/min | 0.696 | 0.714 | 0.487 | 0.207 | 0.077 | 0.080 | 0.088 | 0.126 | 0.174 | 0.146 |
| MSE(1) | MSE(2) | MSE(3) | MSE(4) | MSE(5) | MSE(6) | MSE(7) | MSE(8) | MSE(9) | |
|---|---|---|---|---|---|---|---|---|---|
| 15,000 r/min | 1.289 | 2.988 | 0.062 | 0.118 | 0.075 | 0.071 | 0.089 | 0.294 | 0.181 |
| 18,000 r/min | 8.862 | 0.140 | 0.183 | 0.140 | 0.102 | 0.111 | 0.156 | 0.386 | 0.090 |
| Algorithm | Computational Expense | |
|---|---|---|
| Simulation Signal (s) | Measured Signal (s) | |
| CEEMDAN | 4.286 | 102.24 |
| Wavelet threshold | 0.790 | 10.422 |
| SSA | 0.393 | 17.525 |
| Proposed method | 4.822 | 105.71 |
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | |
|---|---|---|---|---|---|---|---|---|---|
| R | 0.481 | 0.492 | 0.599 | 0.554 | 0.534 | 0.347 | 0.137 | 0.091 | 0.107 |
| MSE | 1.293 | 3.054 | 1.480 | 3.165 | 1.935 | 0.537 | 0.261 | 0.240 | 0.168 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Chen, Y.; Li, N.; Zhai, J.; Han, Q.; Hou, Z. A Denoising Method of Micro-Turbine Acoustic Pressure Signal Based on CEEMDAN and Improved Variable Step-Size NLMS Algorithm. Machines 2022, 10, 444. https://doi.org/10.3390/machines10060444
Zhang J, Chen Y, Li N, Zhai J, Han Q, Hou Z. A Denoising Method of Micro-Turbine Acoustic Pressure Signal Based on CEEMDAN and Improved Variable Step-Size NLMS Algorithm. Machines. 2022; 10(6):444. https://doi.org/10.3390/machines10060444
Chicago/Turabian StyleZhang, Jingqi, Yugang Chen, Ning Li, Jingyu Zhai, Qingkai Han, and Zengxuan Hou. 2022. "A Denoising Method of Micro-Turbine Acoustic Pressure Signal Based on CEEMDAN and Improved Variable Step-Size NLMS Algorithm" Machines 10, no. 6: 444. https://doi.org/10.3390/machines10060444
APA StyleZhang, J., Chen, Y., Li, N., Zhai, J., Han, Q., & Hou, Z. (2022). A Denoising Method of Micro-Turbine Acoustic Pressure Signal Based on CEEMDAN and Improved Variable Step-Size NLMS Algorithm. Machines, 10(6), 444. https://doi.org/10.3390/machines10060444