From Normal Surfaces to Normal Curves to Geodesics on Surfaces

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
2.1. Simplicial Complexes
- If , then .
- Let and let . Then .
- K is locally finite.
- ;
- if , then there exists such that .
- There exists a subdivision of K such that
- , for any
- , for any and for all .
2.2. Fat Triangulations
- A triangle in is called -fat iff all its angles are larger than a prescribed value .
- A k-simplex , , is -fat if all its facets are -fat for some .
- A triangulation is fat if all its simplices are -fat for some .
2.2.1. Existence Results
- τ is -fat
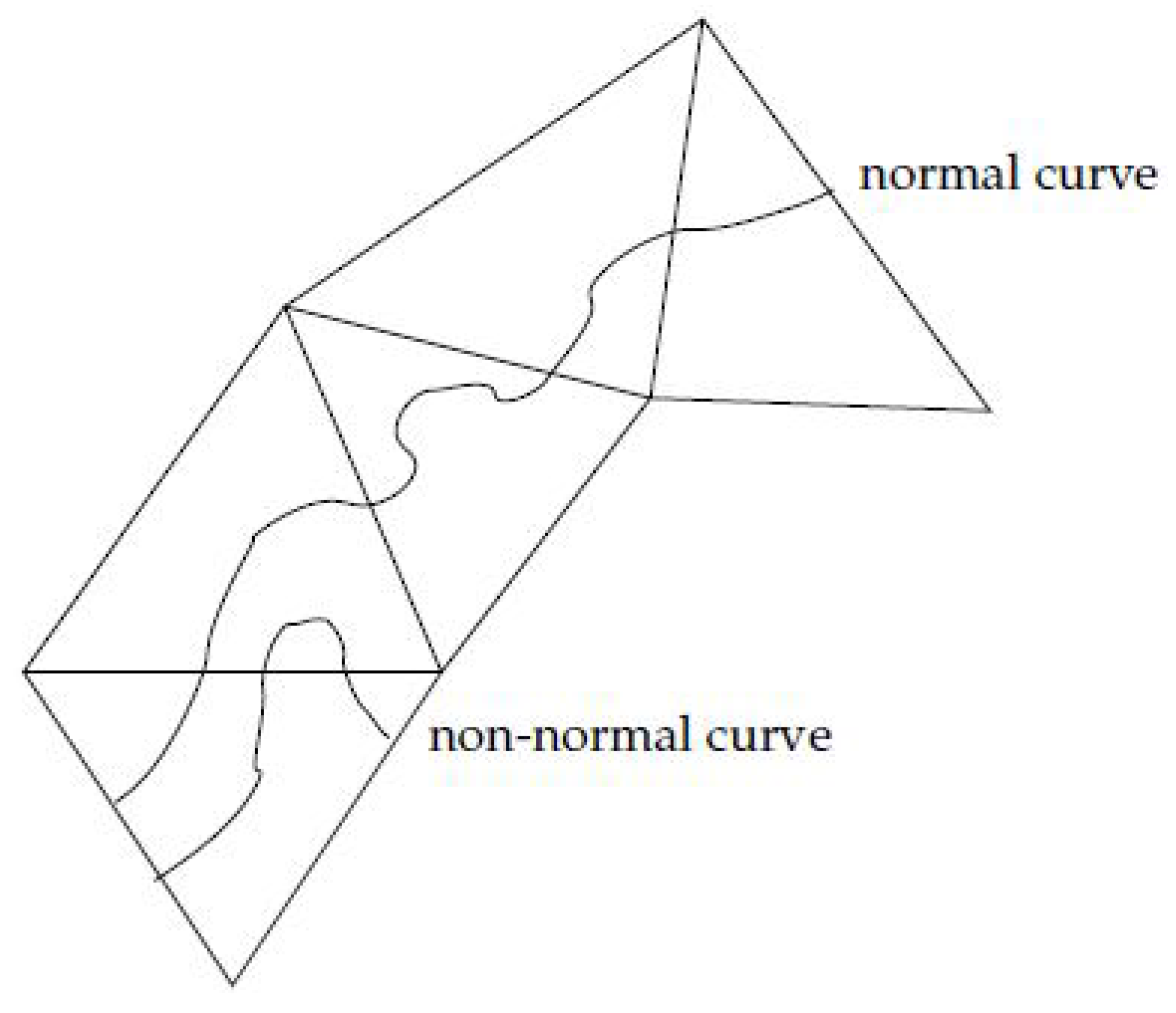
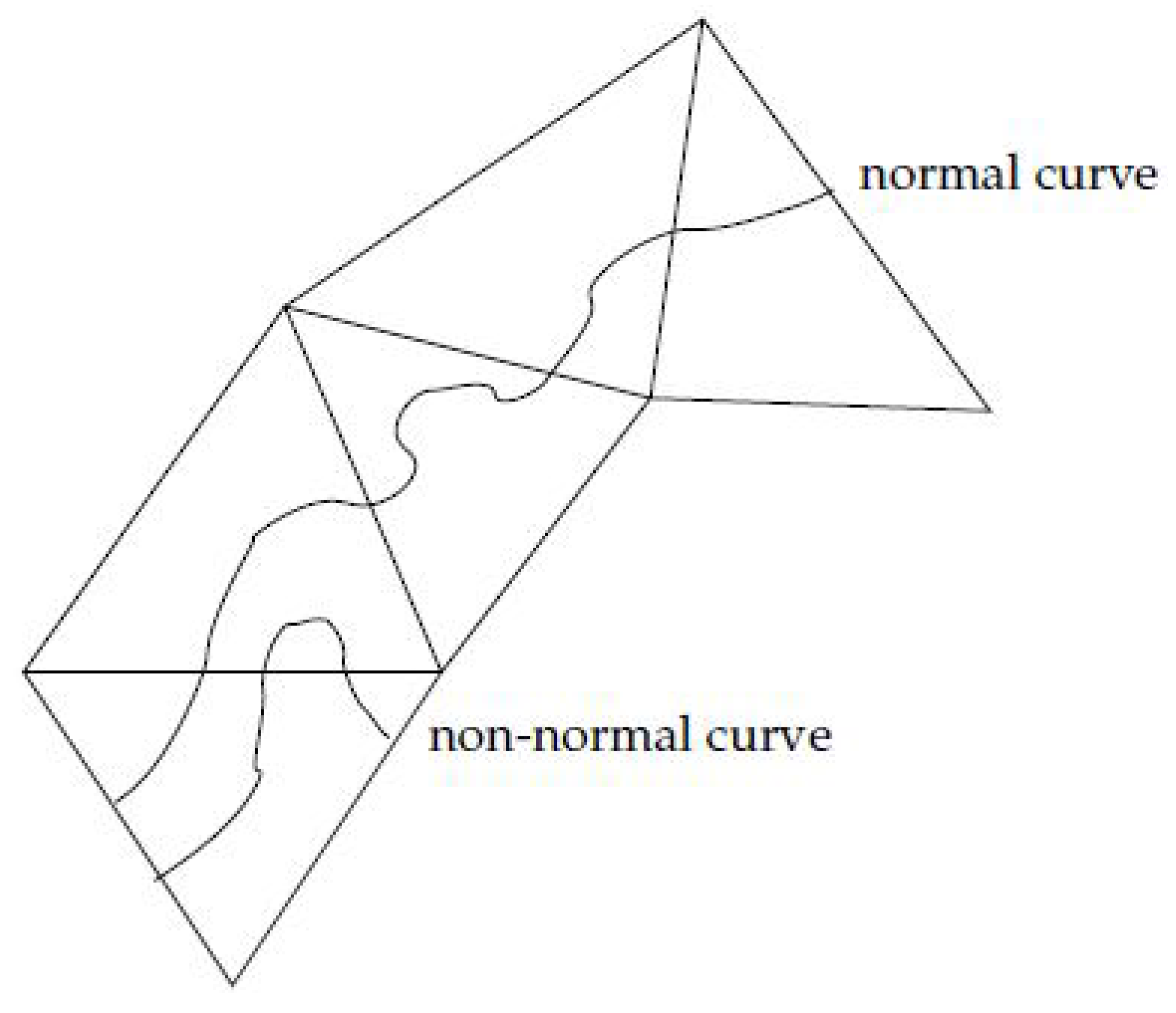
2.3. Normal Curves
2.4. Geometric Measures
2.4.1. Weight and Length
- A curve embedded in Σ and transverse to will be called normally short iff its weight is minimal with respect to its homotopy class.
- A closed normal curve that is not null homotopic (a.k.a essential), is called normally shortest if its weight is minimal with respect to all homotopy classes of essential curves in Σ.
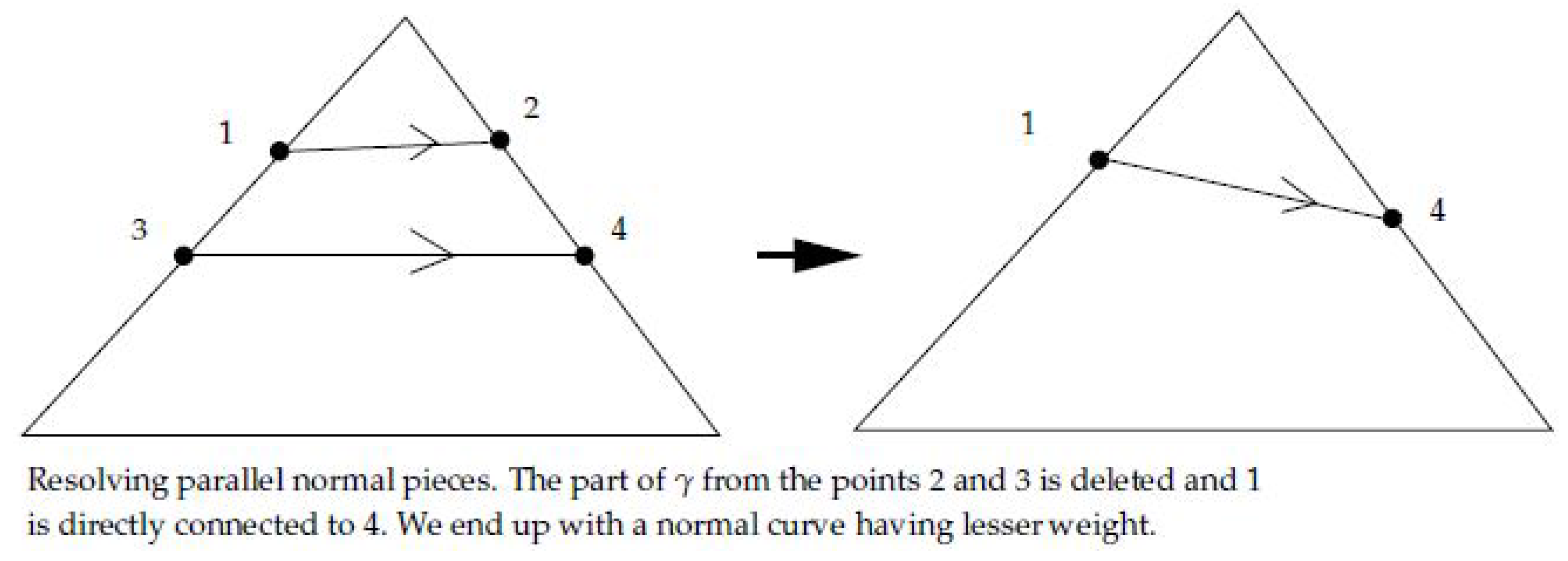
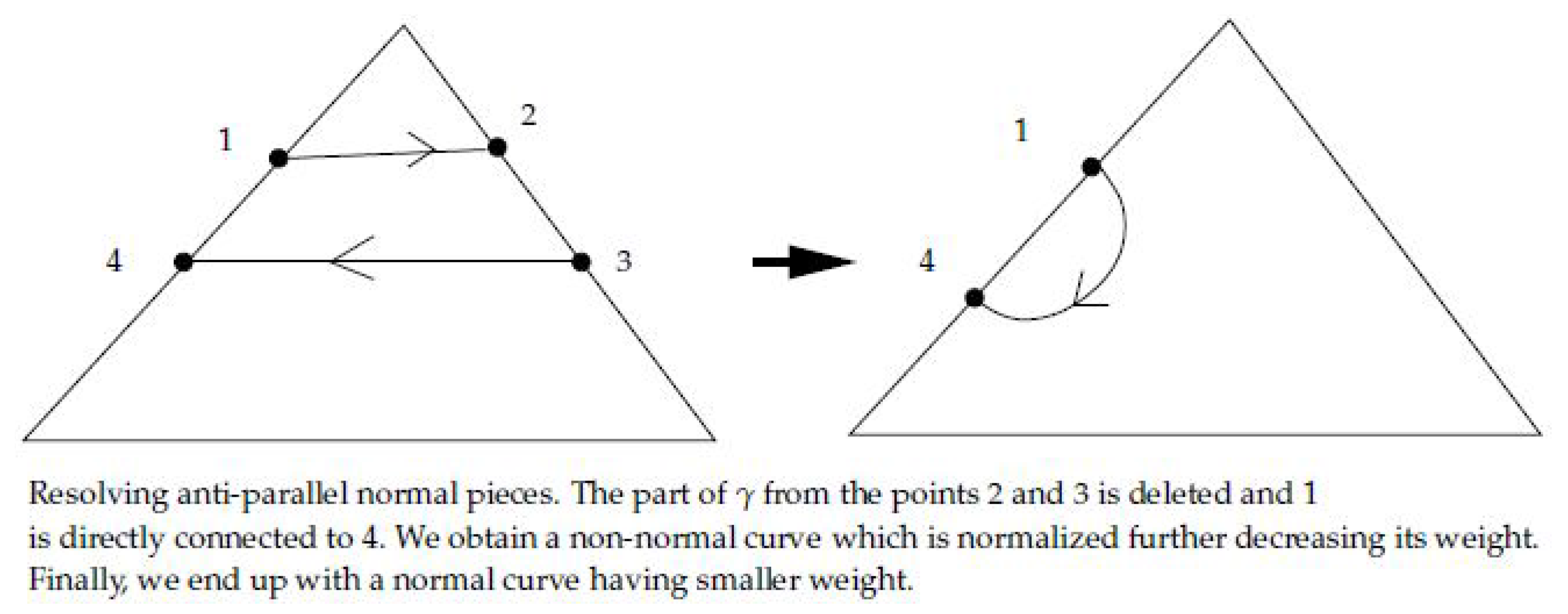
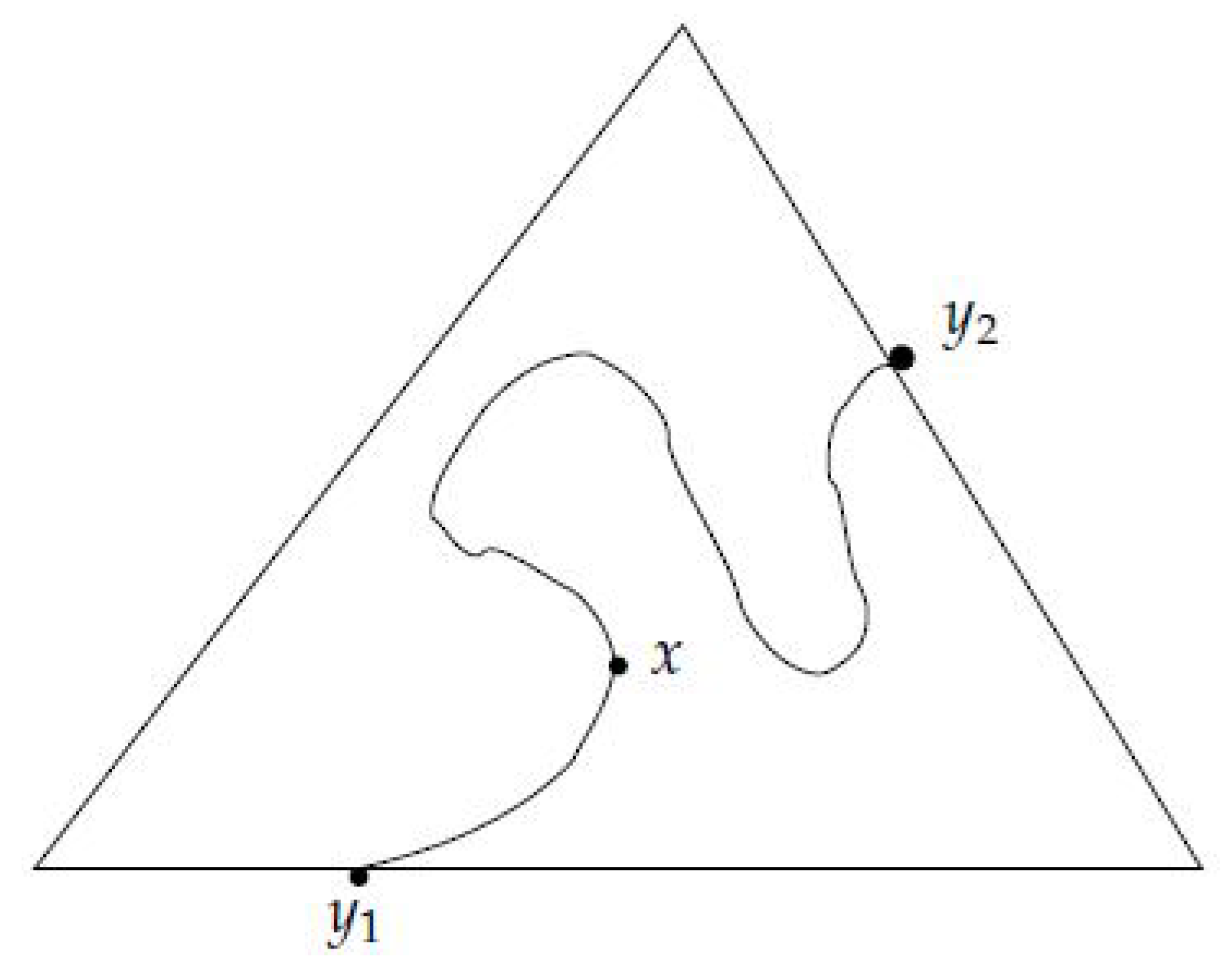
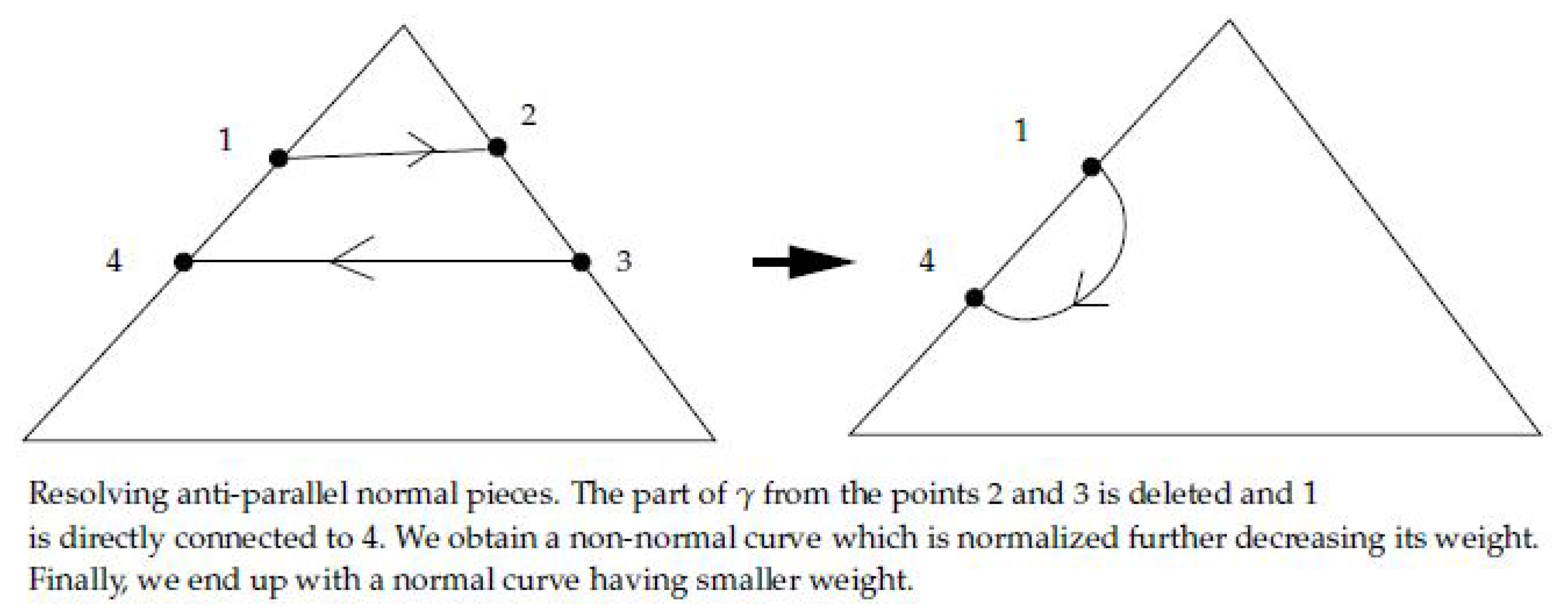
- A normally short curve must be normal. This holds since if there exists a non-normal piece in some 2-face then it can be isotoped through the edge it intersects twice, thus reducing weight by at least two in contradiction to the minimality.
- For any close curve there exists a finite sequence of local isotopies which deforms the curve either to a normal curve or a curve which is completely included in just one triangle. In particular, if the curve is not null-homotopic, it is isotopic to a normal curve. This is true since the weight of a curve is an integer valued function which is bounded from below by zero, hence any curve is isotopic to some curve of minimal weight in its isotopy class which is either normal or has zero weight in which case it is entirely contained in a single 2-face.
2.4.2. Curvature
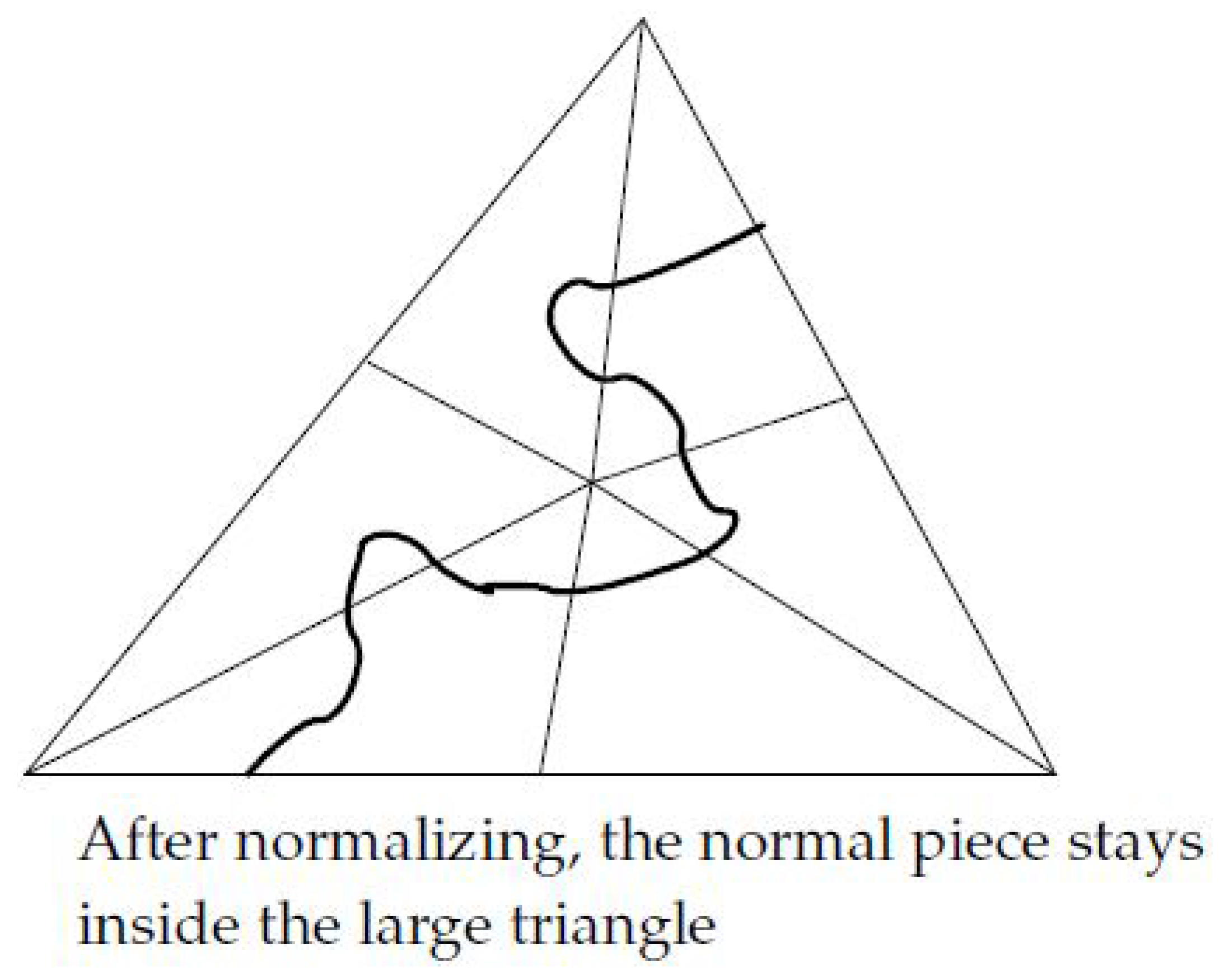
3. Shortening Through Straightening
- Normalize C with respect to . For the shortening procedure the definition of normal curves is altered a bit. A normal curve is allowed to go through a vertex of .
- Take a least-weight normal curve , isotopic to C.
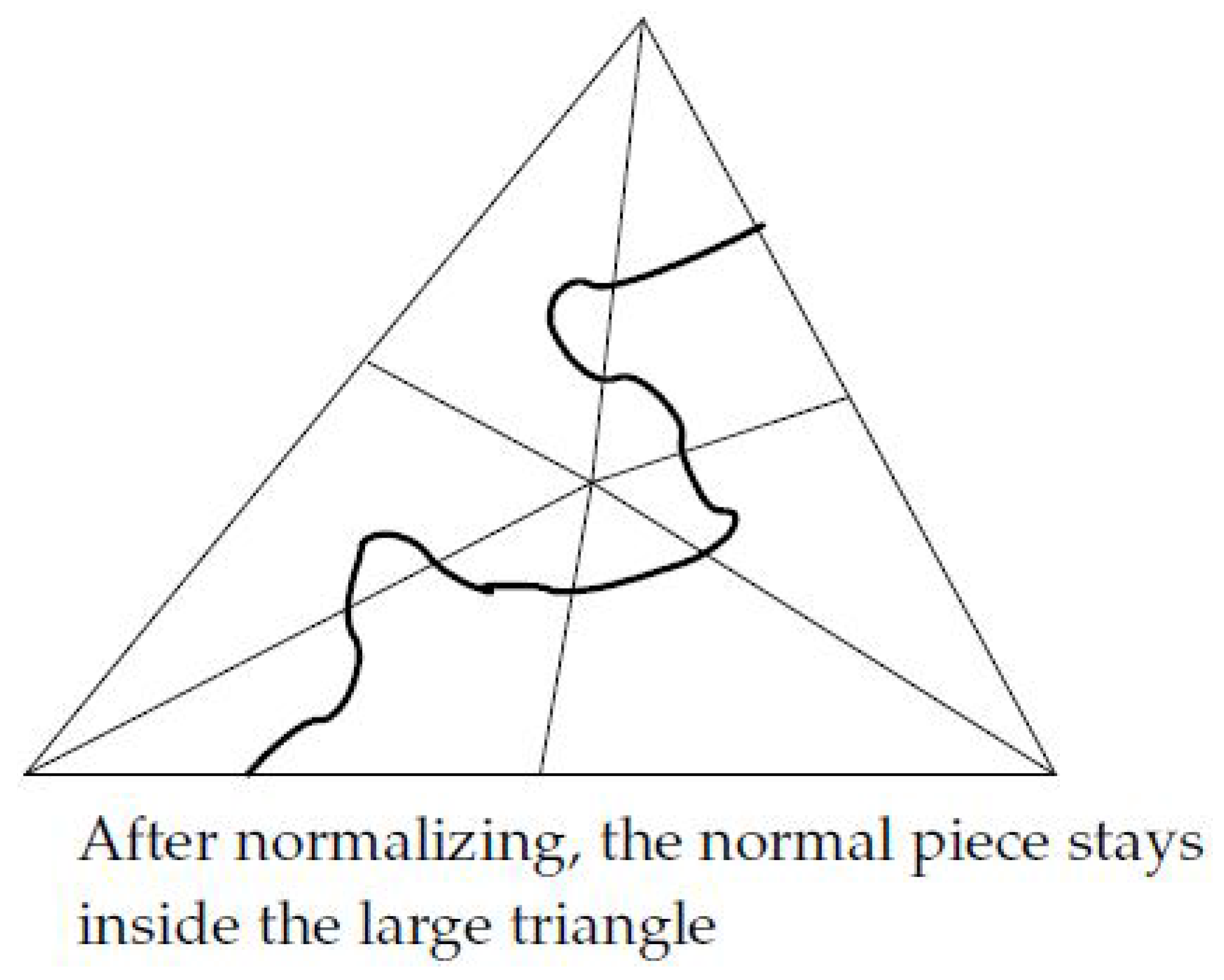
- Straighten at all intersections with the edges of , except at vertices. If intersects a vertex then this point does not change.
- Subdivide , using the median subdivision, to obtain a new triangulation .
- Go to (1) while C is replaced by .
4. Experimental Results
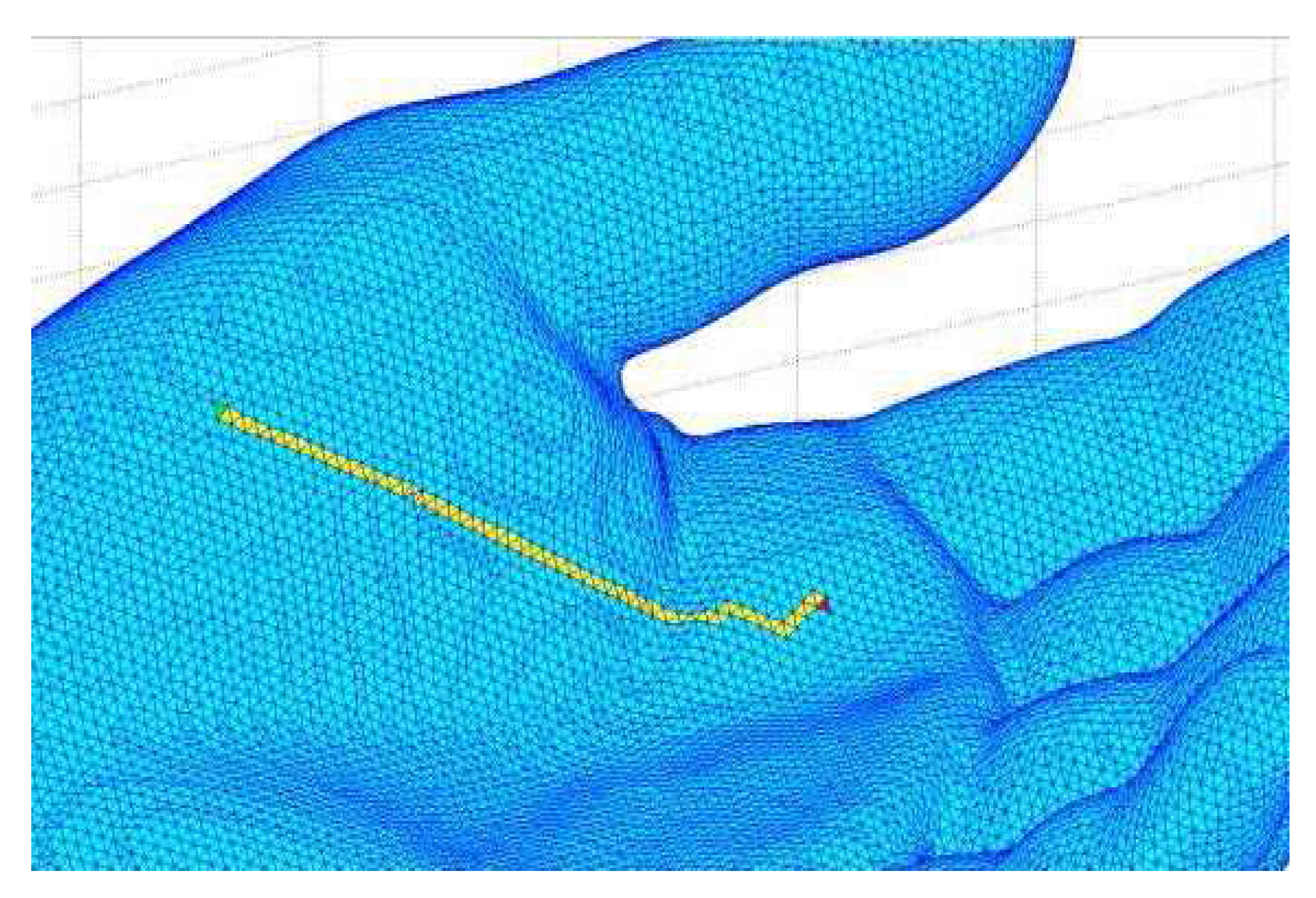
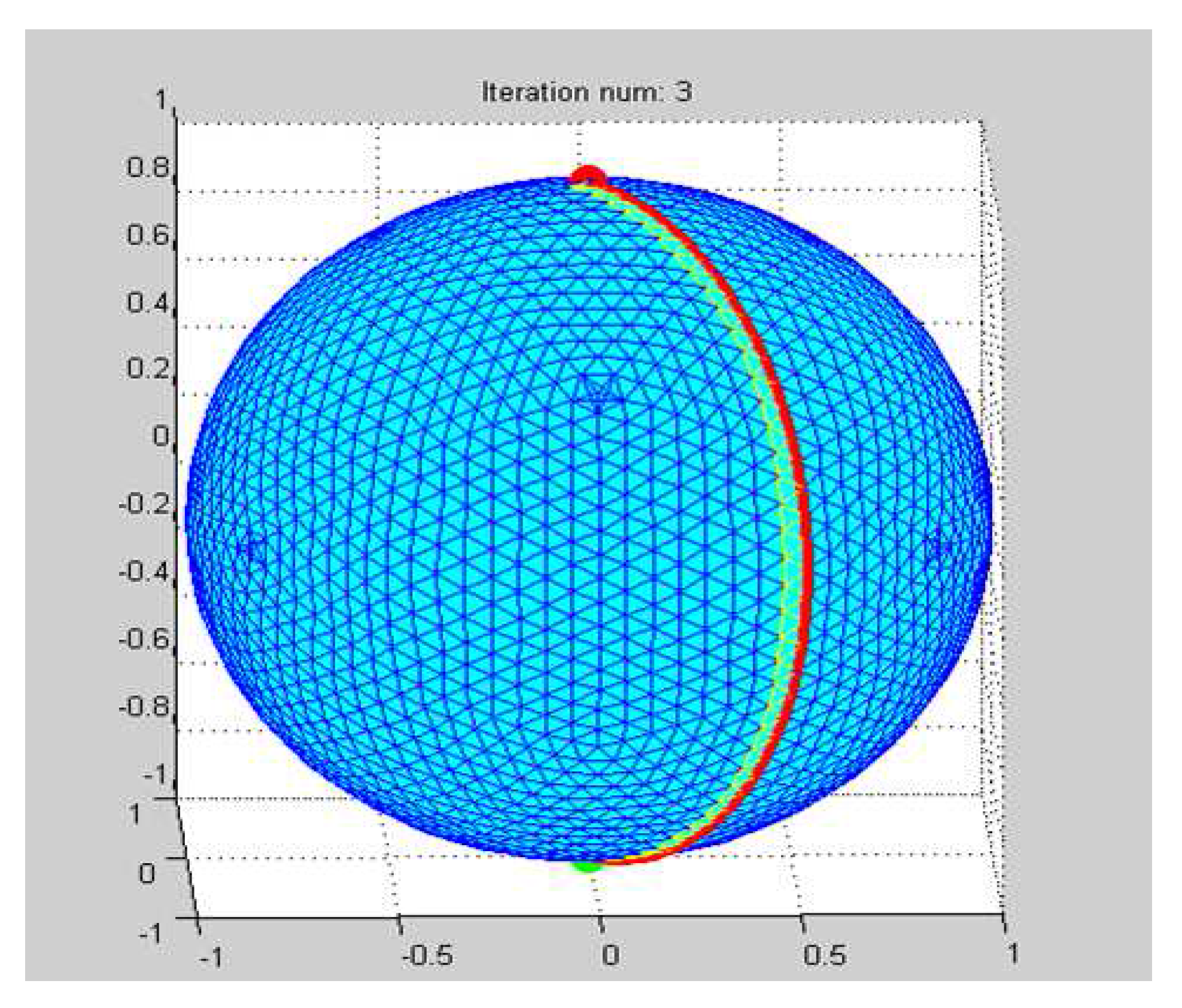
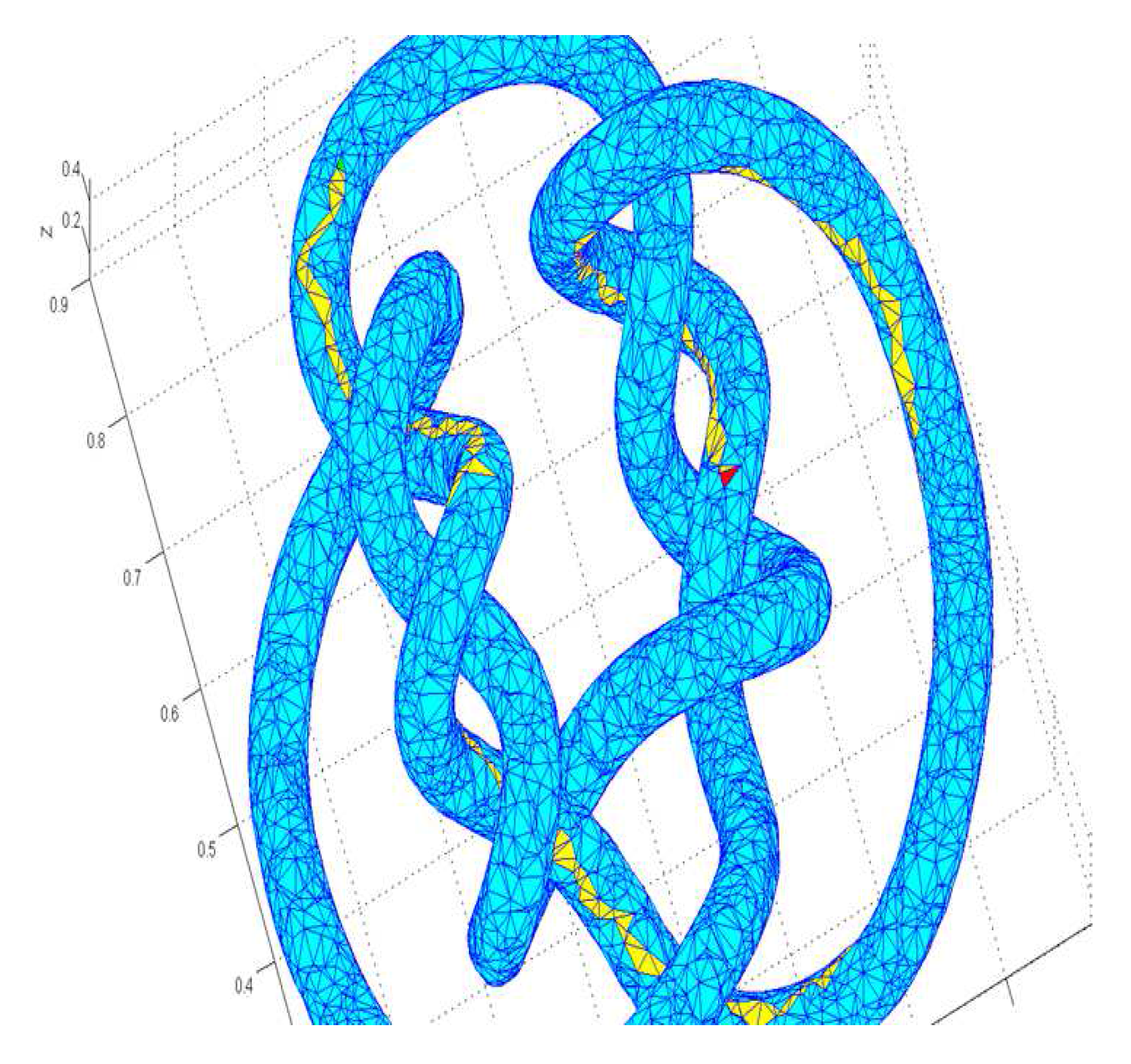
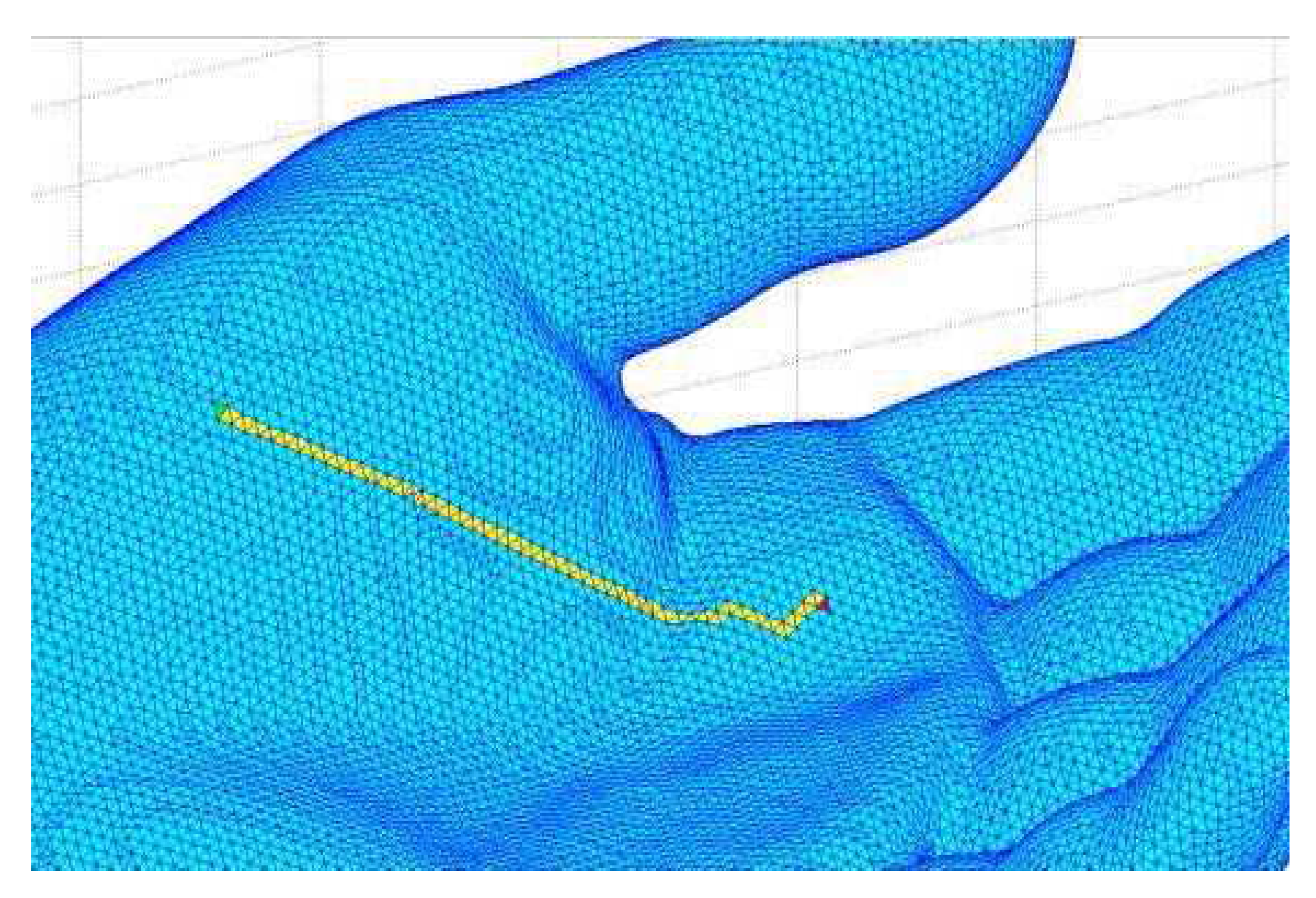
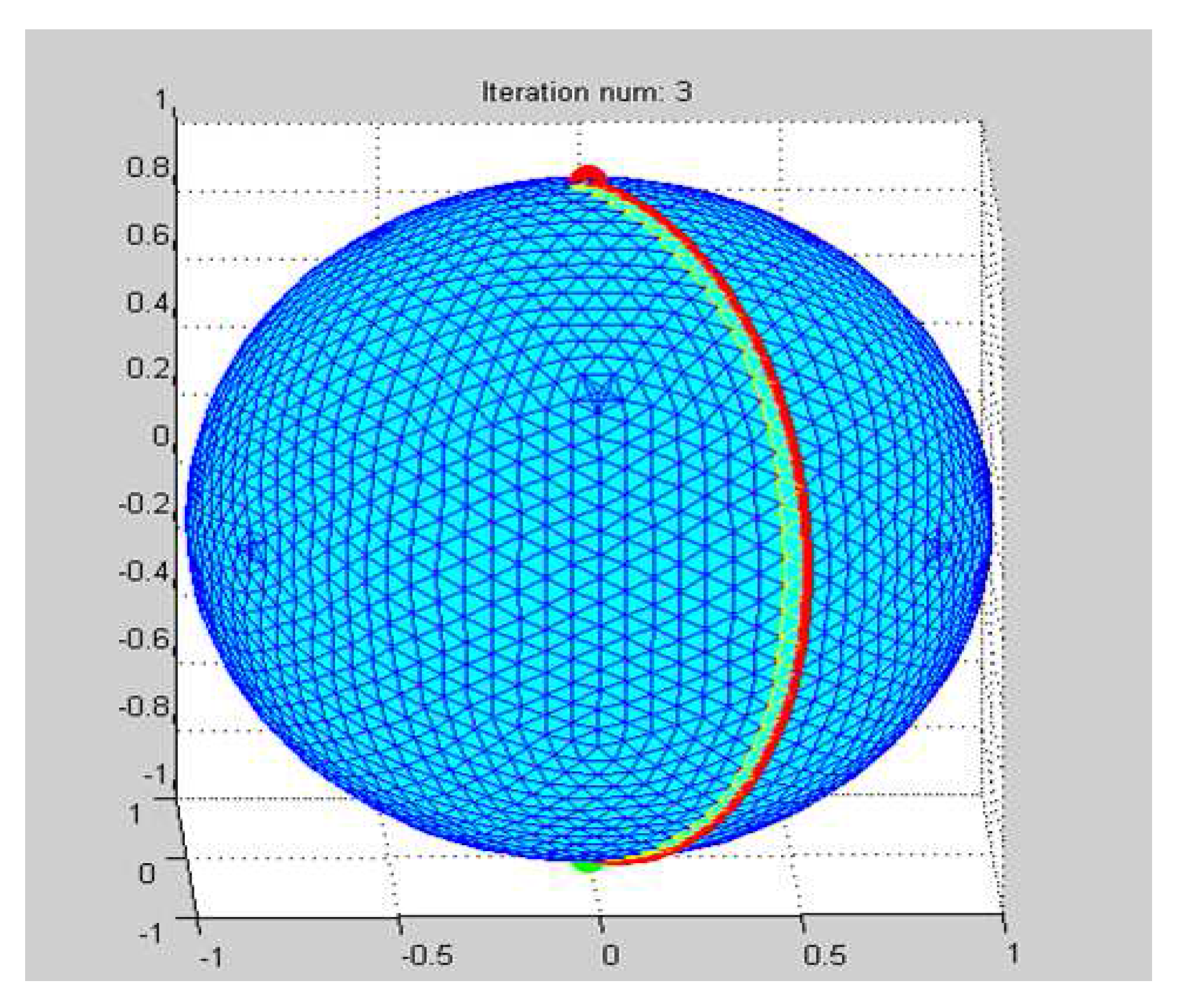
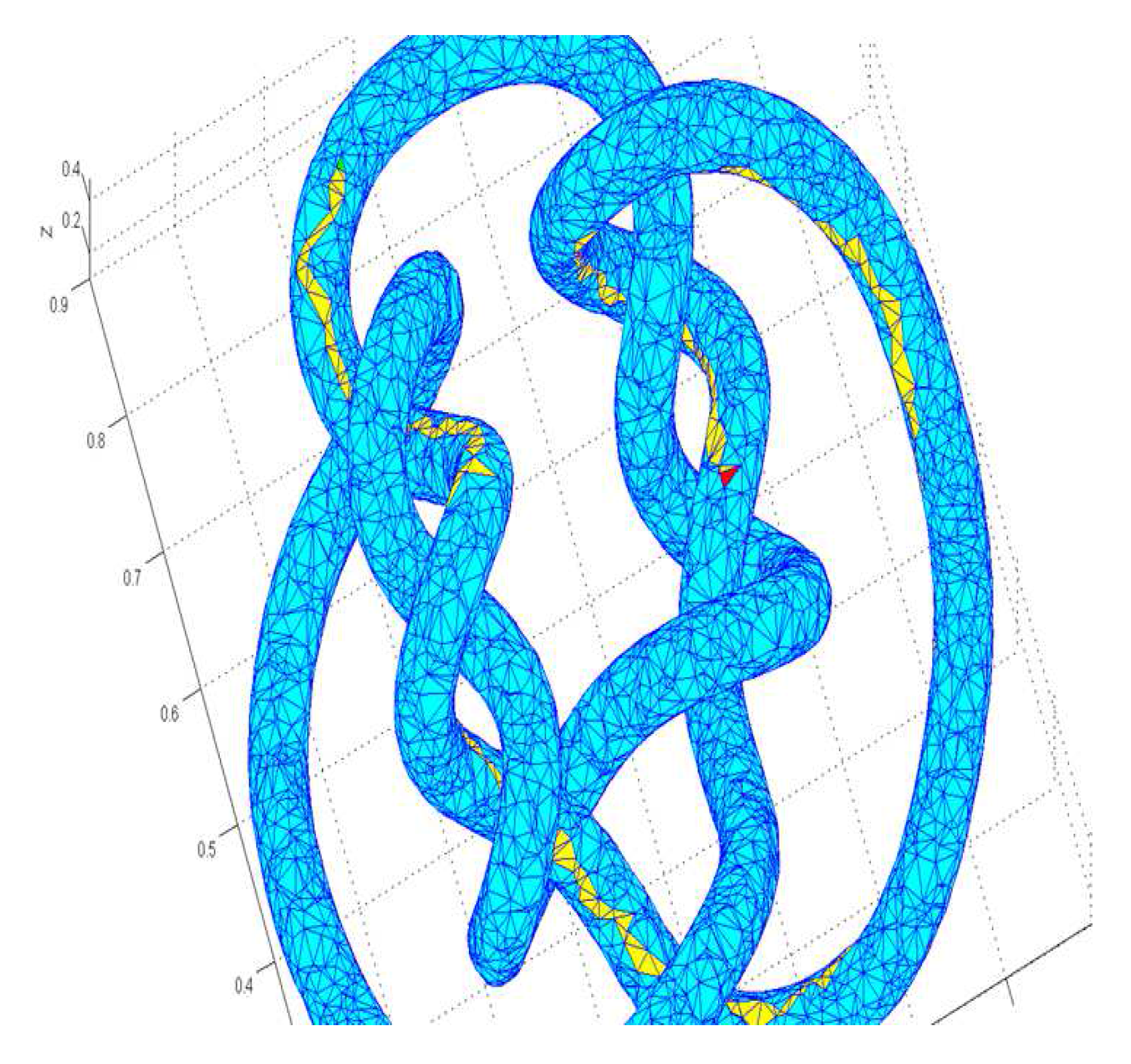
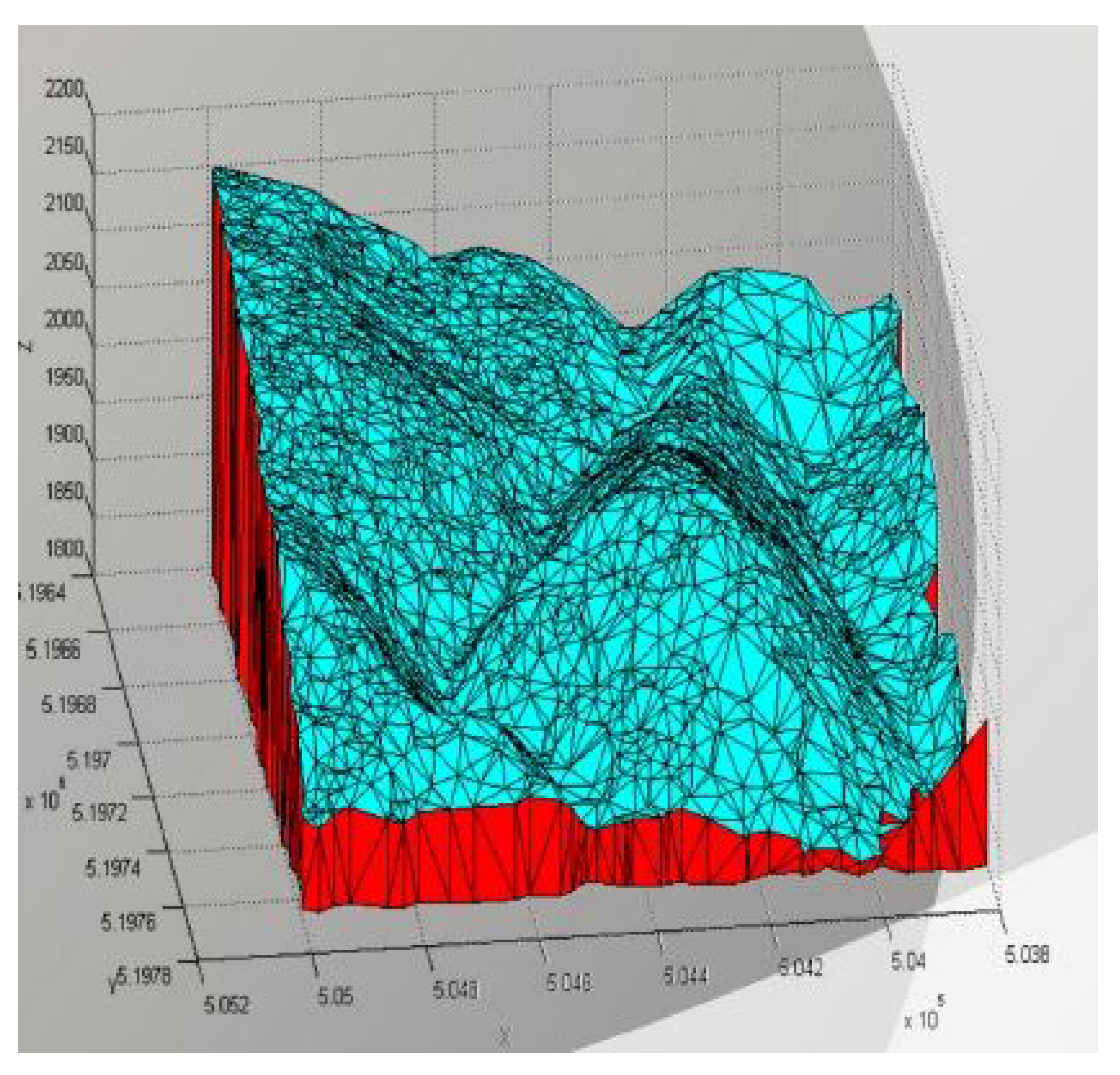
4.1. Synthetic Surfaces
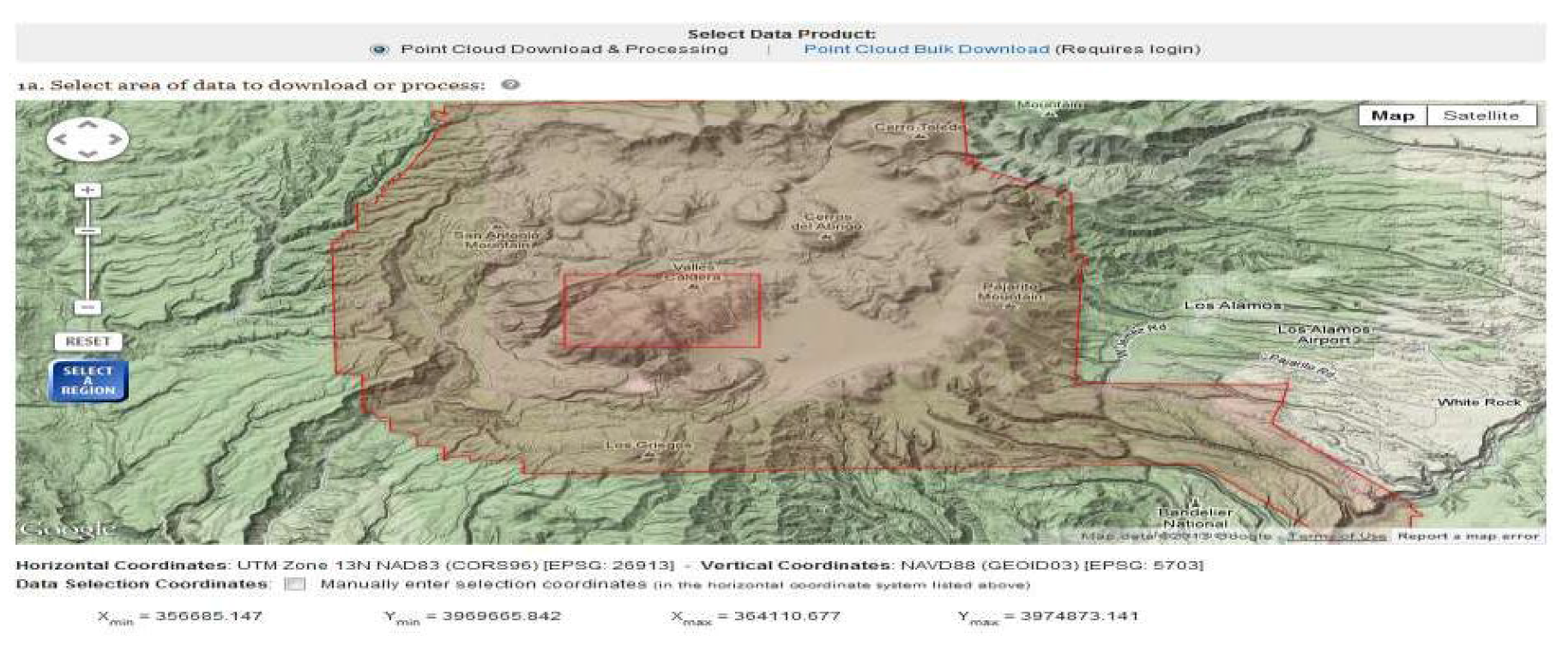
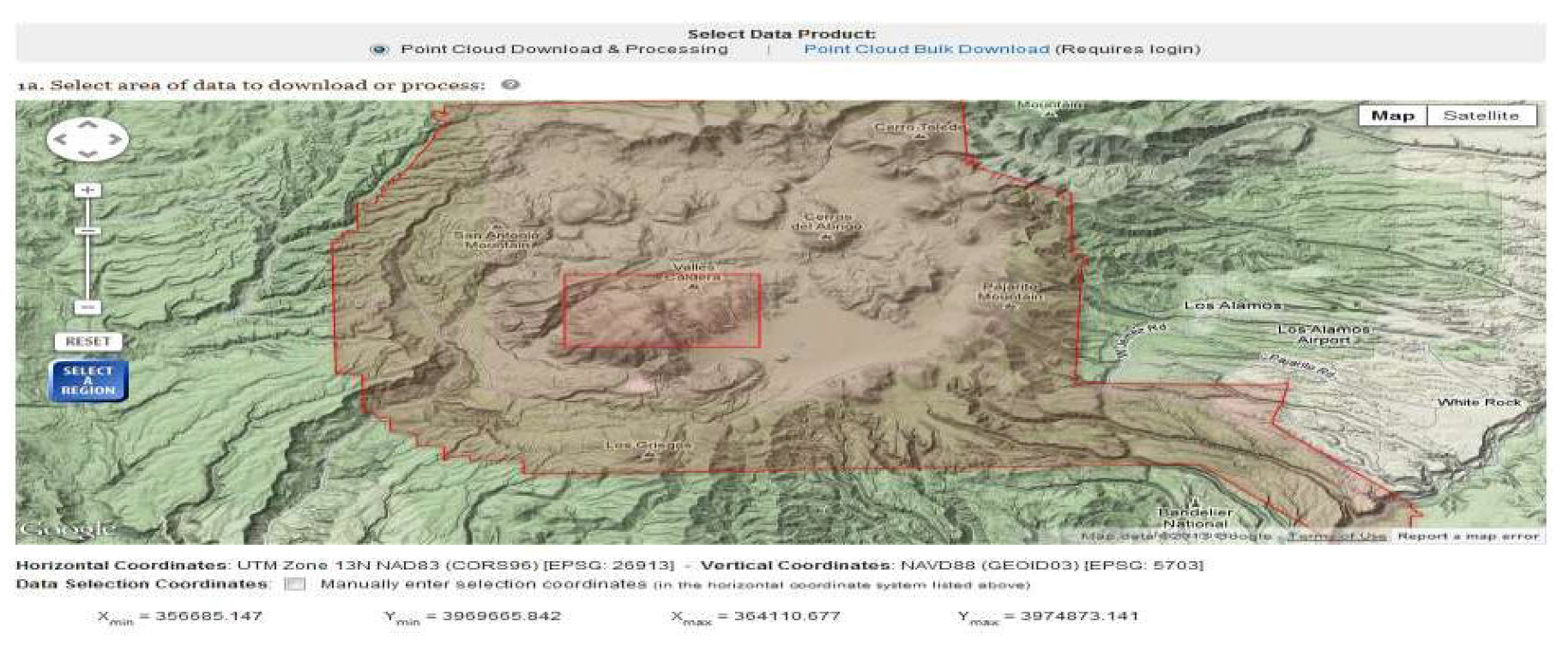
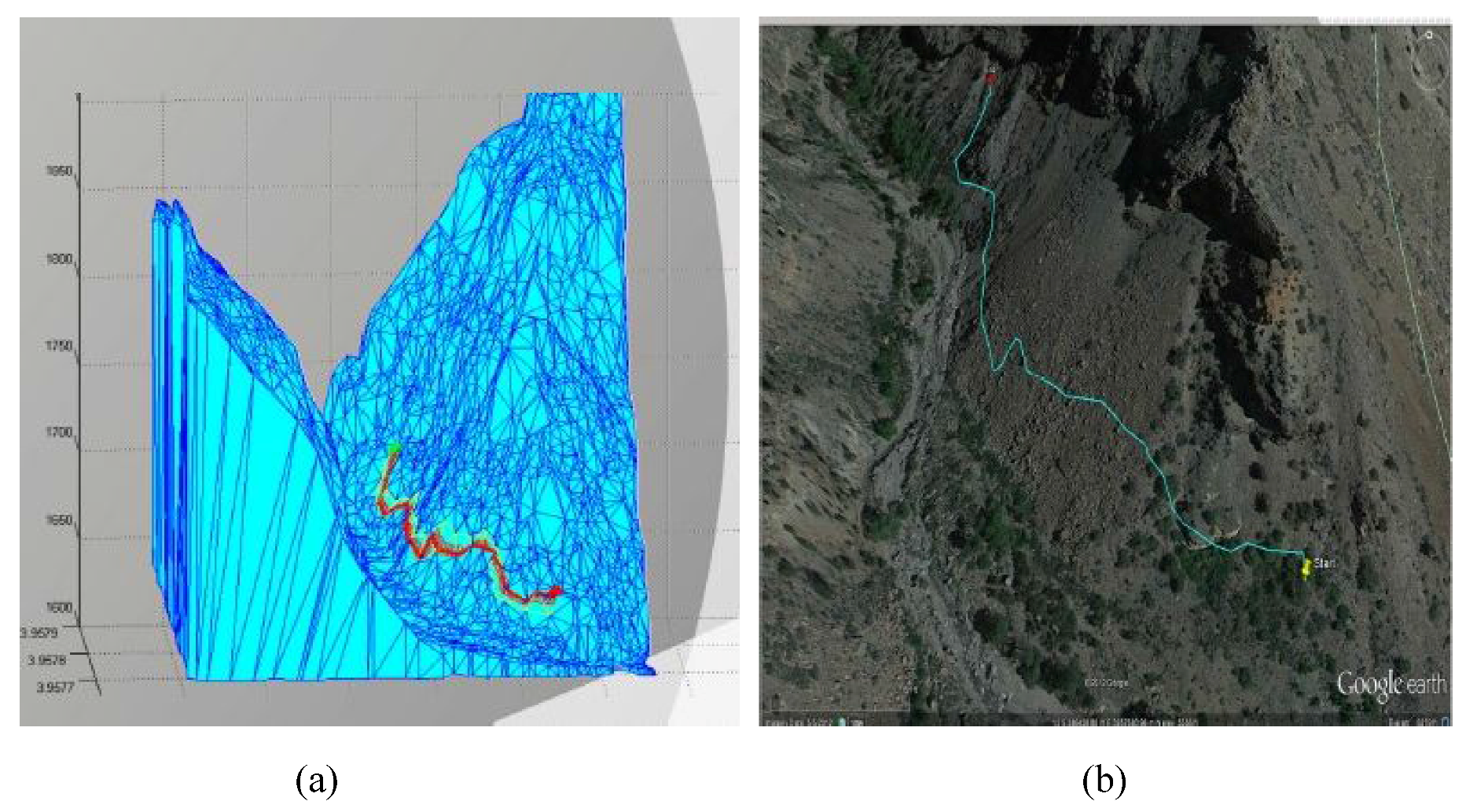
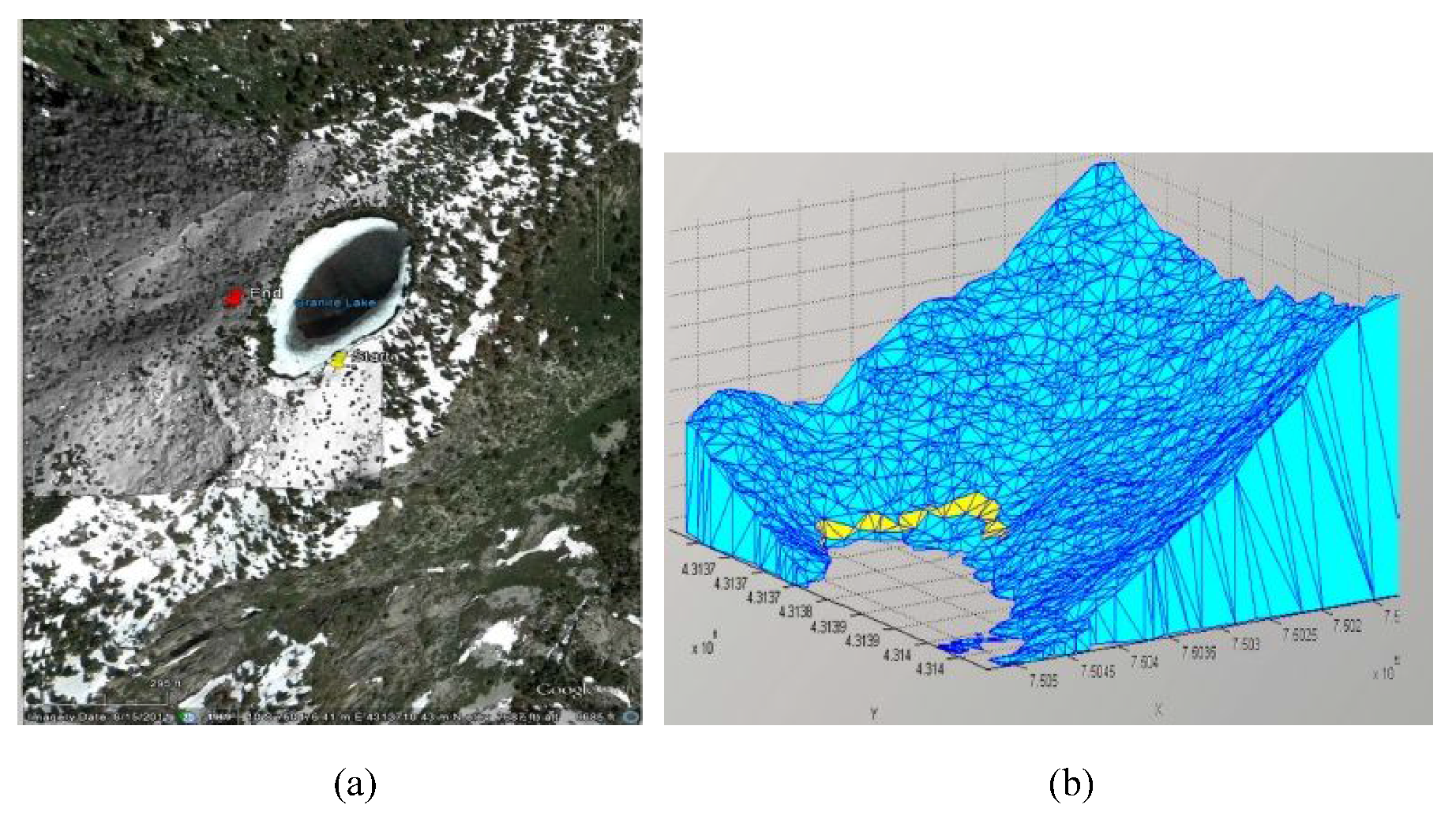
4.2. “Real” Data and Weighted Triangulation
5. Approximations of Geodesics
6. Reflections in the Dual Graph
- Each vertex of the dual path corresponds to a triangle intersected by .
- Each edge of is assigned to an edge of at which crosses from one 2-cell to an adjacent one.
- Each edge of is weighted according to the number of times crosses through the corresponding edge of .
- The length of is defined to be the sum of weights of all its edges.
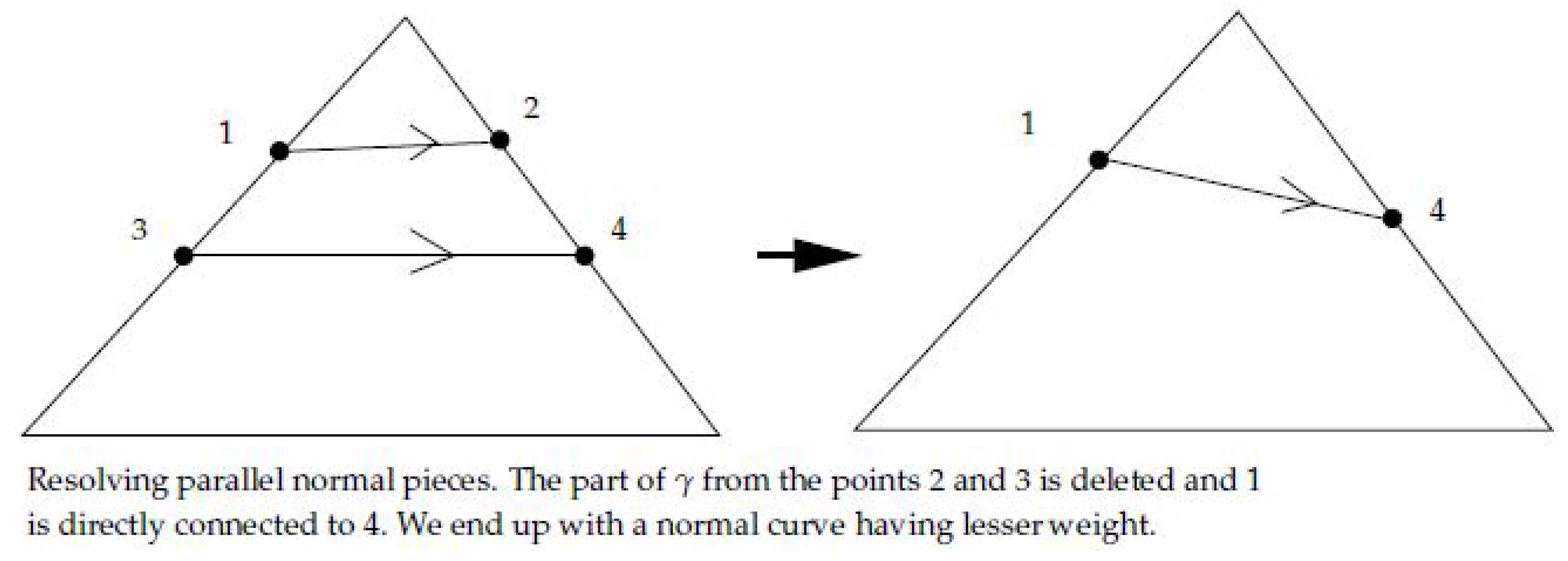
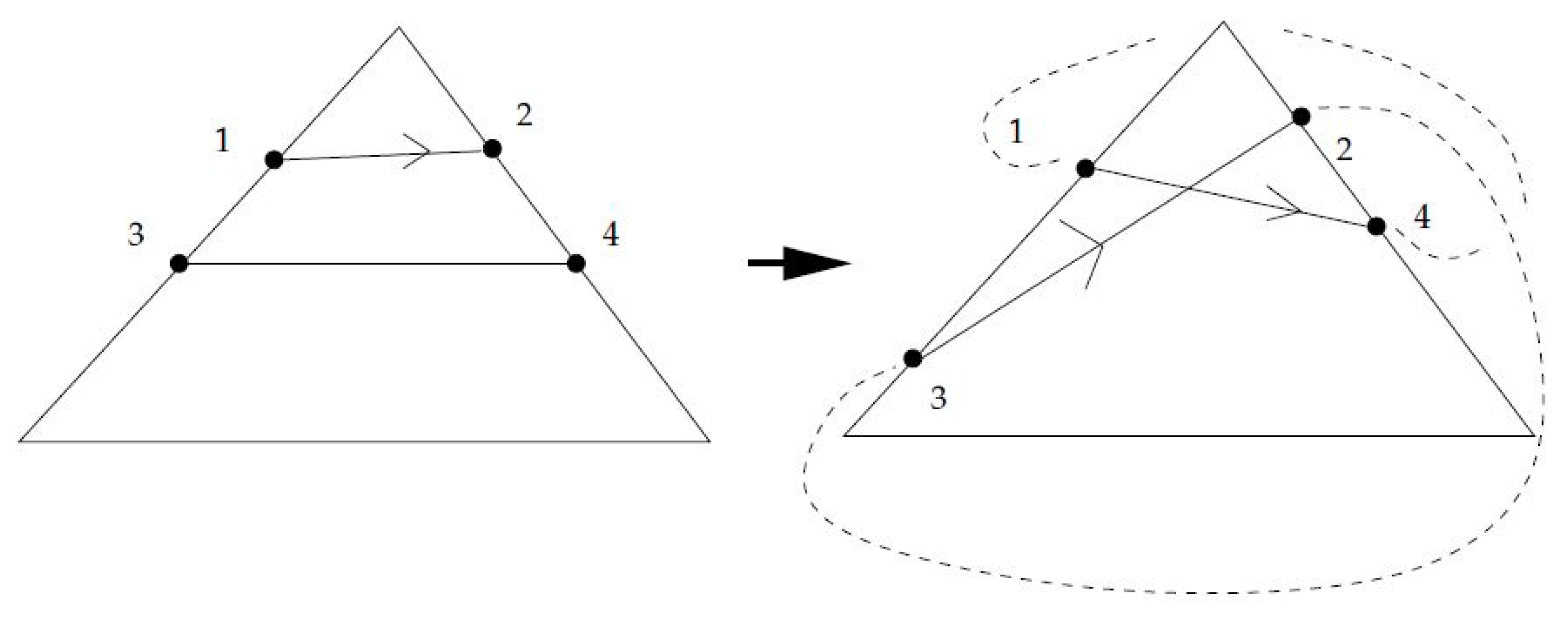
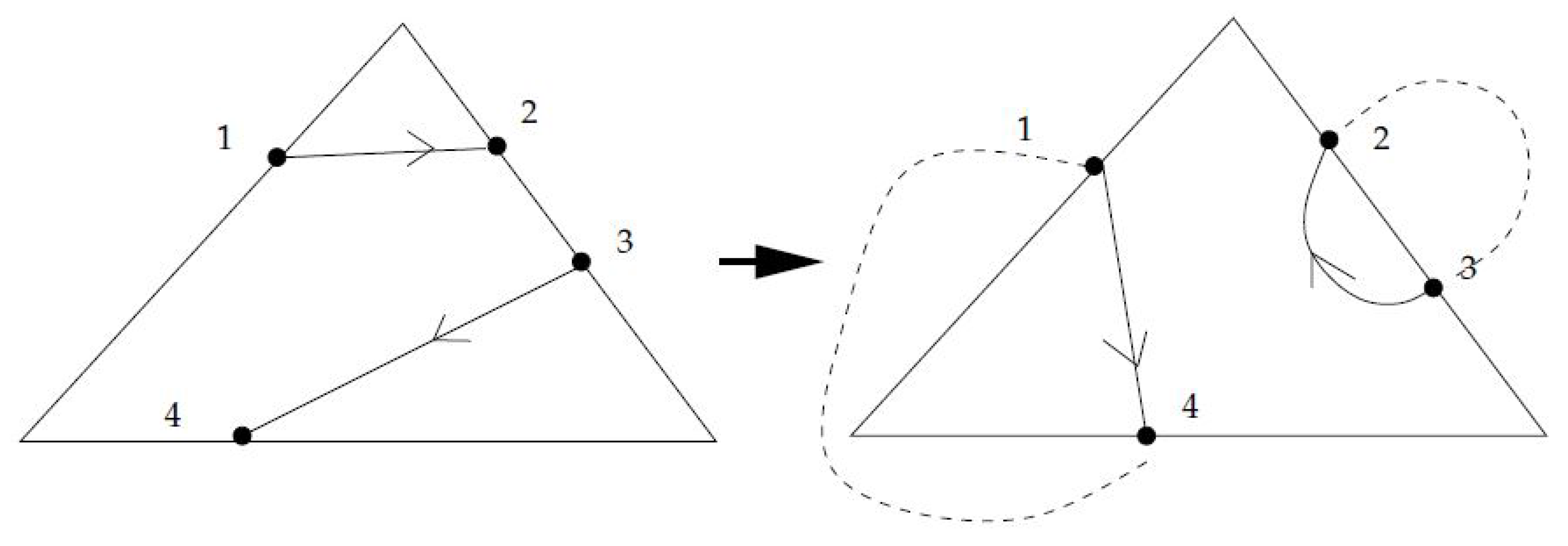
- Two parallel intersections: passes through twice between the same two edges of with the same orientation.
- Anti parallel intersection: as in yet, with opposite orientations.
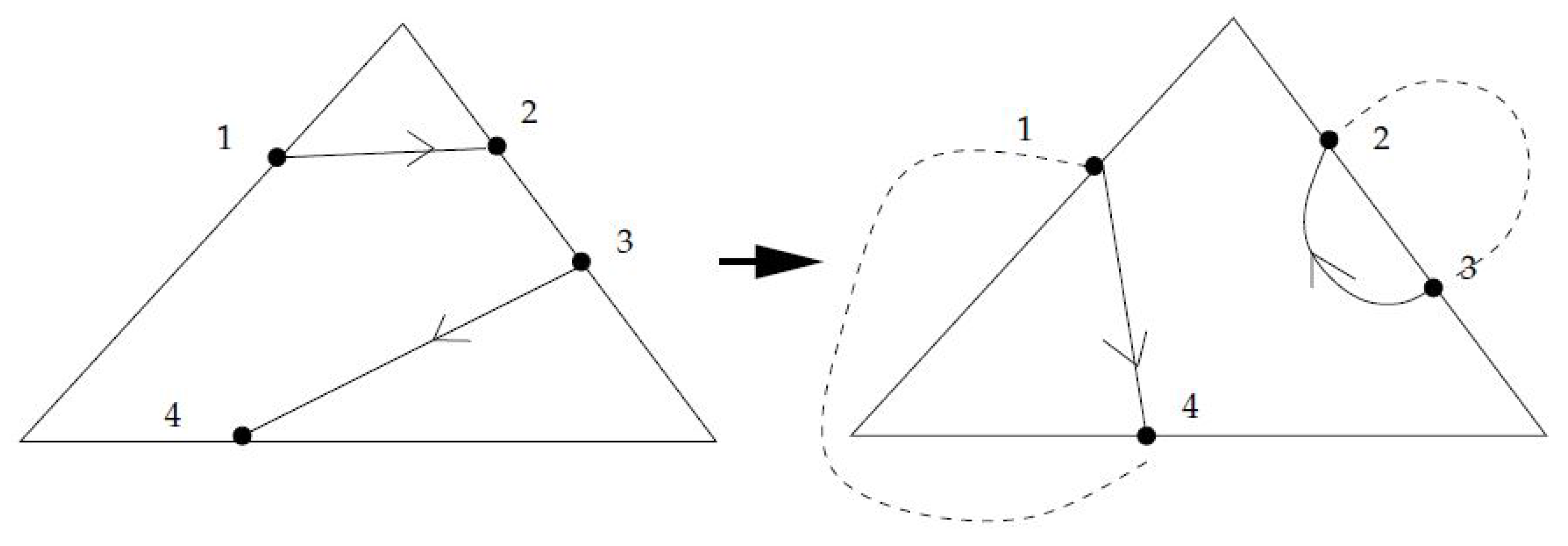
- Non parallel: Only one pair of points is on the same edge.
Conflicts of Interest
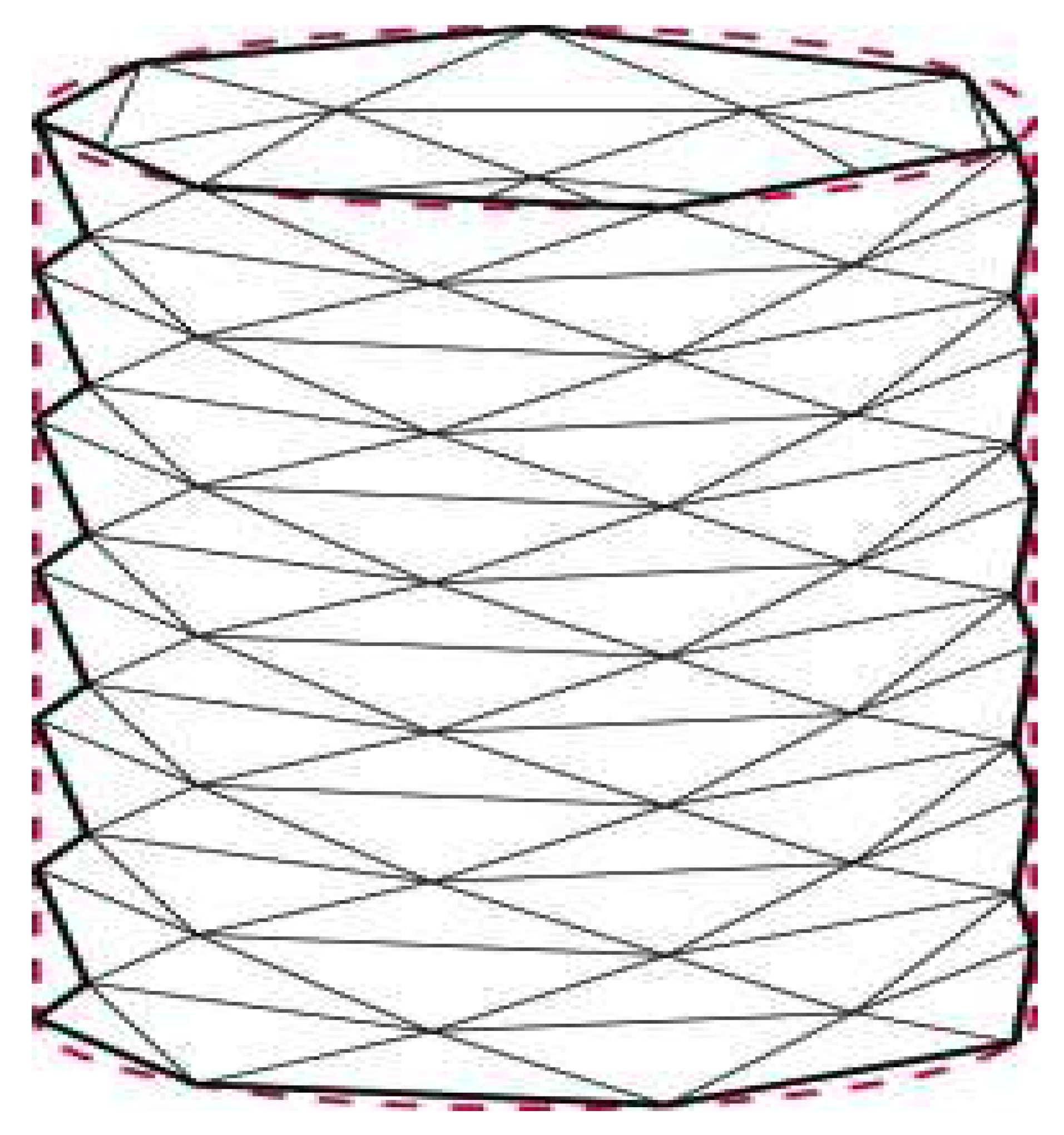
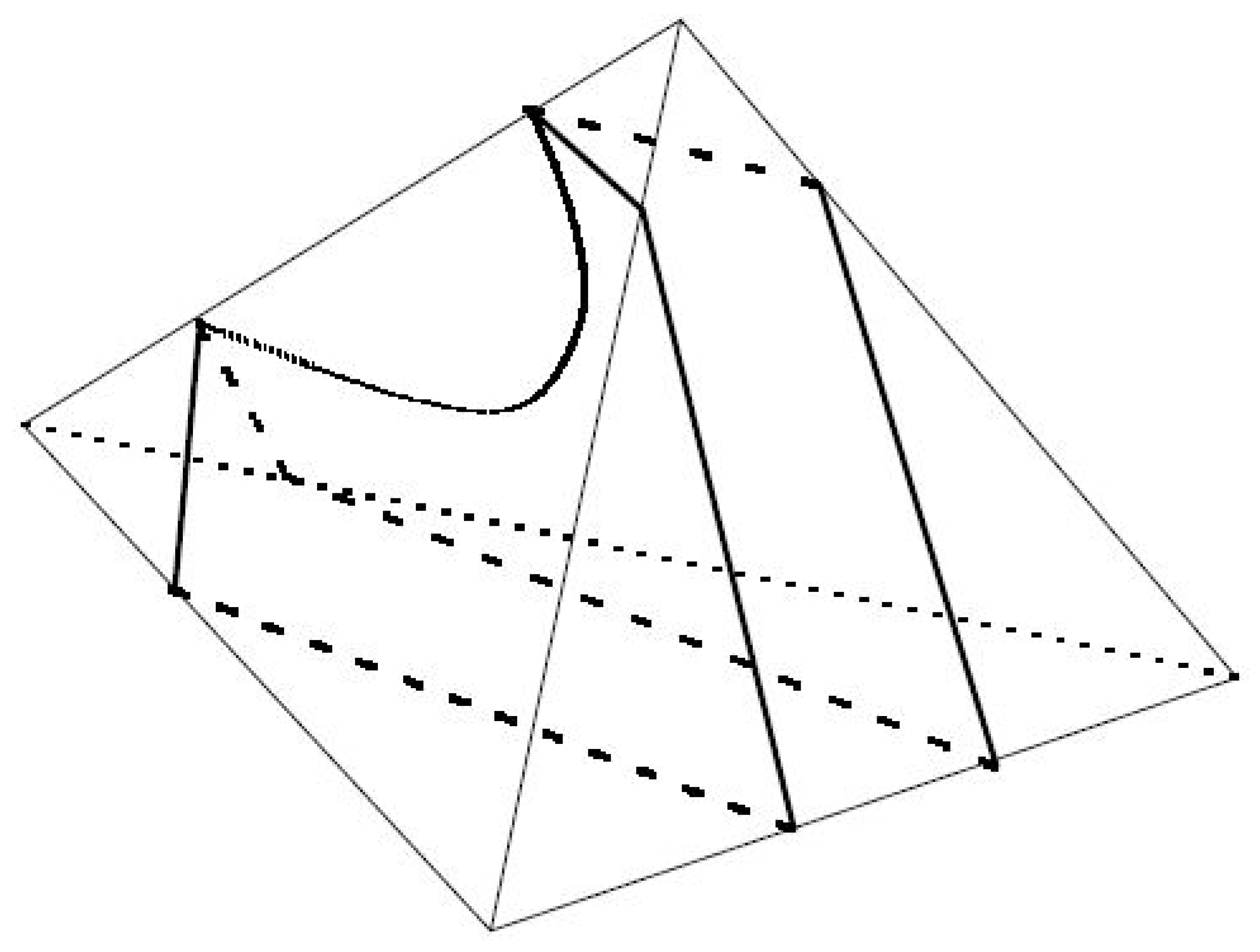
Appendix A. Normal Surfaces
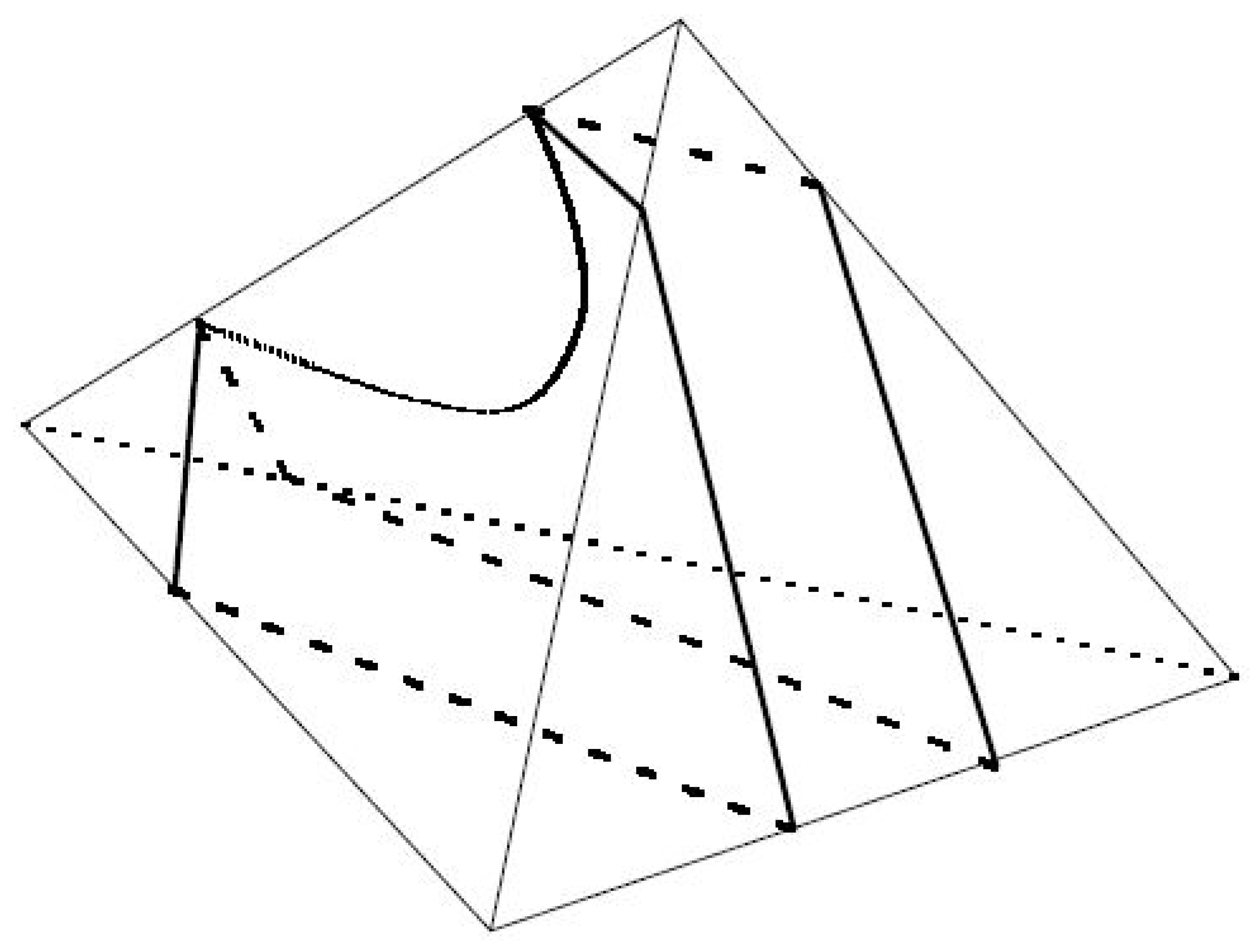
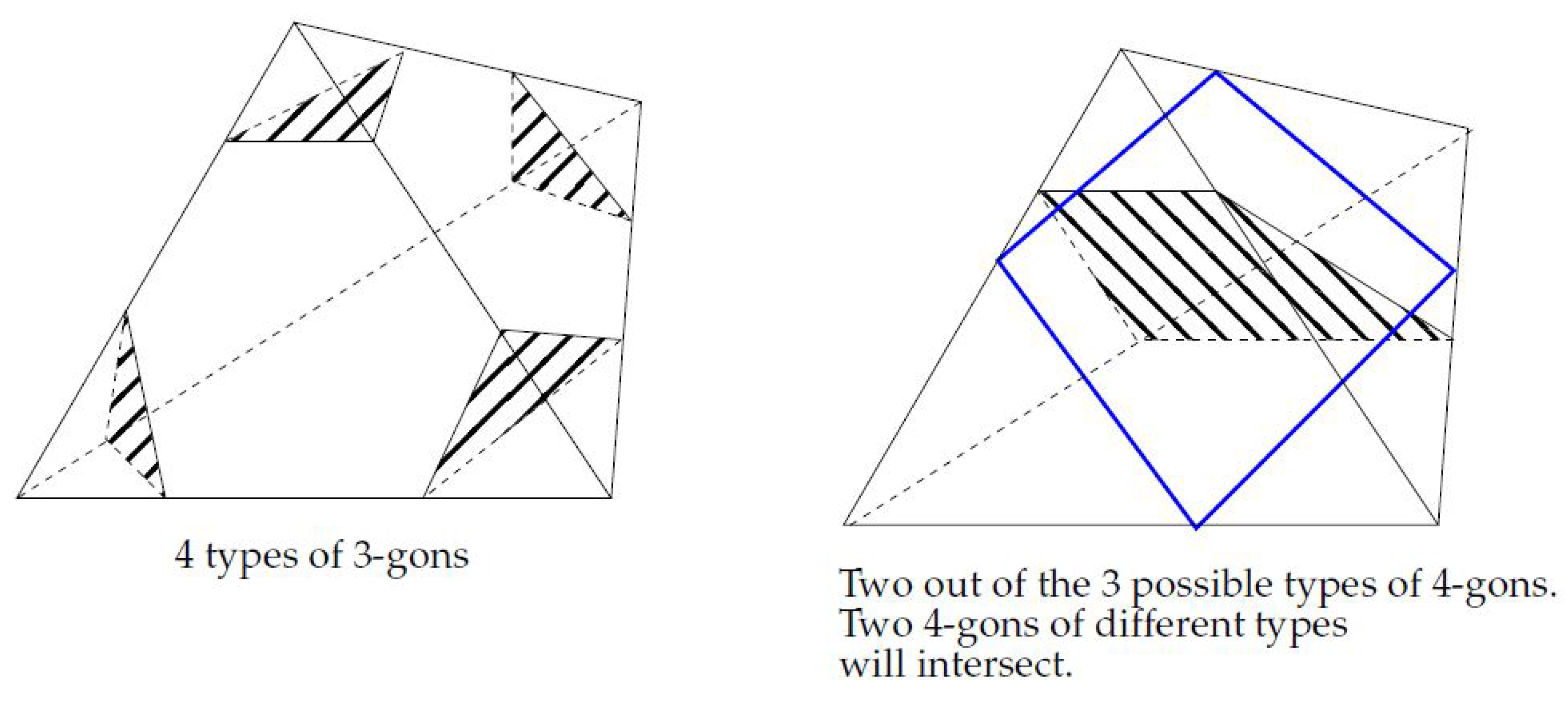
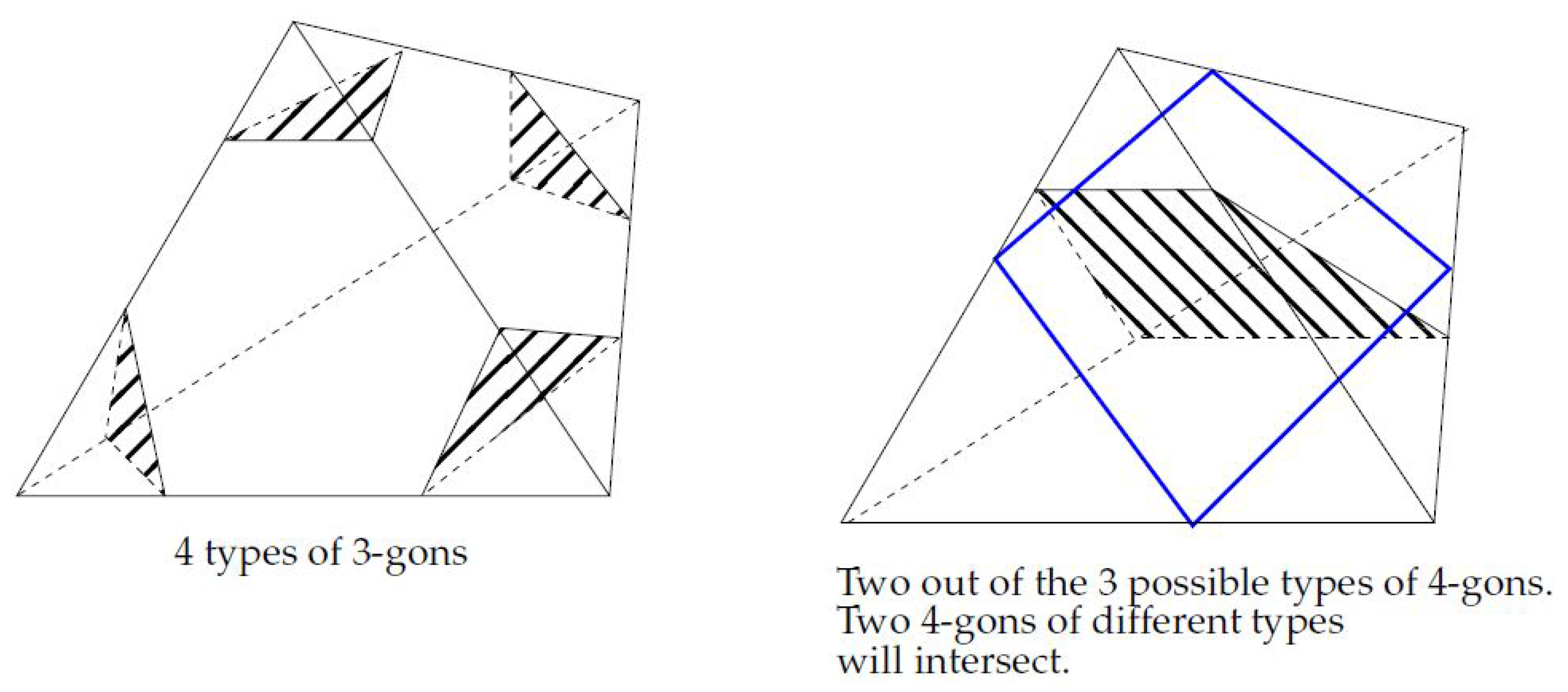
Appendix B. Possible Normal Disk Types
Appendix C. Weight and Area
- The weight , of is the total number of intersections of the surface with the 1-skeleton .
- A metric on each 2-face of is induced by identifying the face with an ideal triangle in the hyperbolic plane . As a result we can measure the length of each arc in . The length , of is defined as the total sum of lengths of all arcs in .
- The area of is defined as the ordered pair , lexicographically ordered.
- A surface is called least weight iff its weight is minimal amongst all surfaces in its isotopy class.
- A normal surface is called a -minimal surface iff its length is a stationary point with respect to small variations in its normal isotopy class.
- A surface is of -least area surface iff its area is minimal in its isotopy class.
Appendix D. Curvature of Normal Surfaces
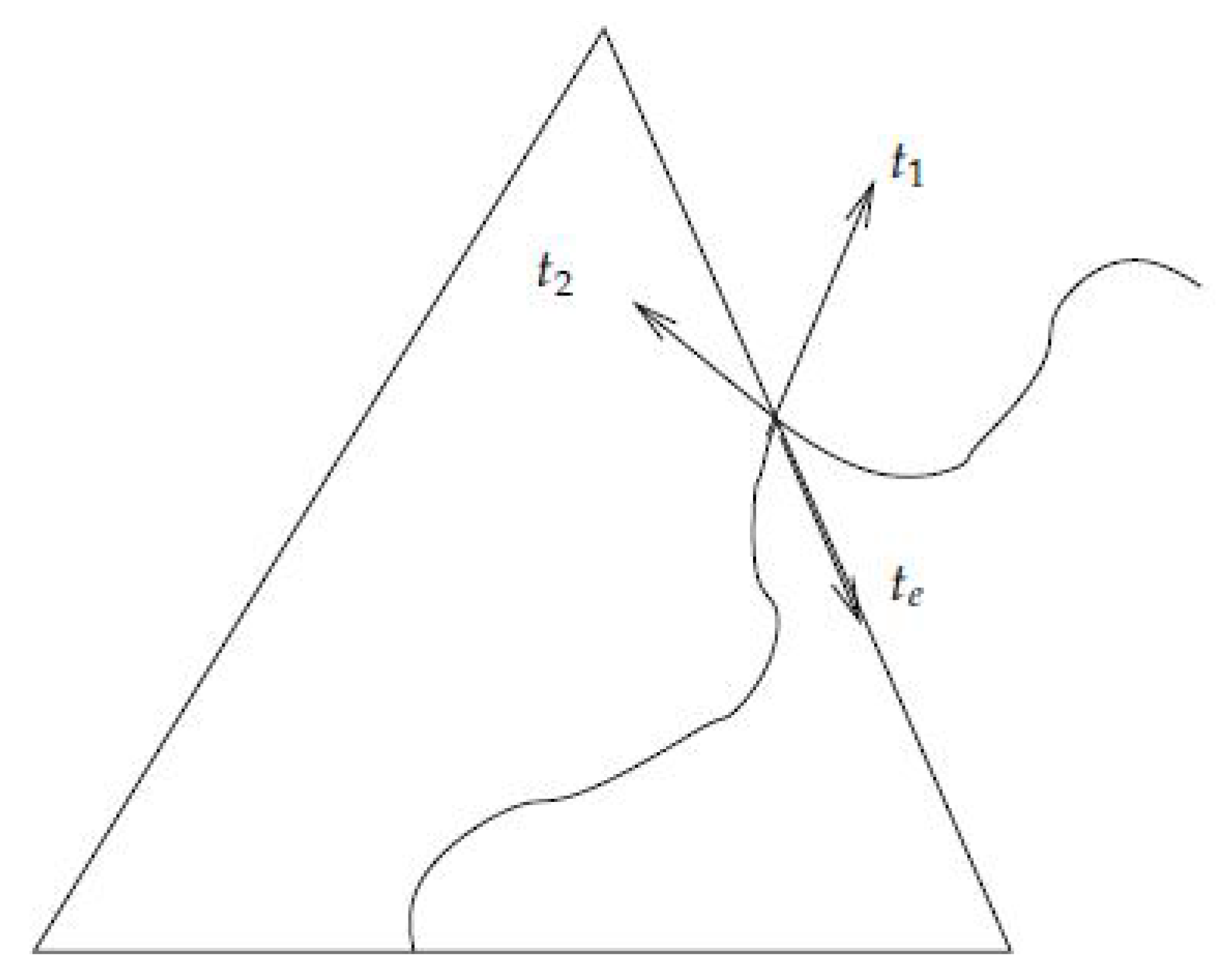
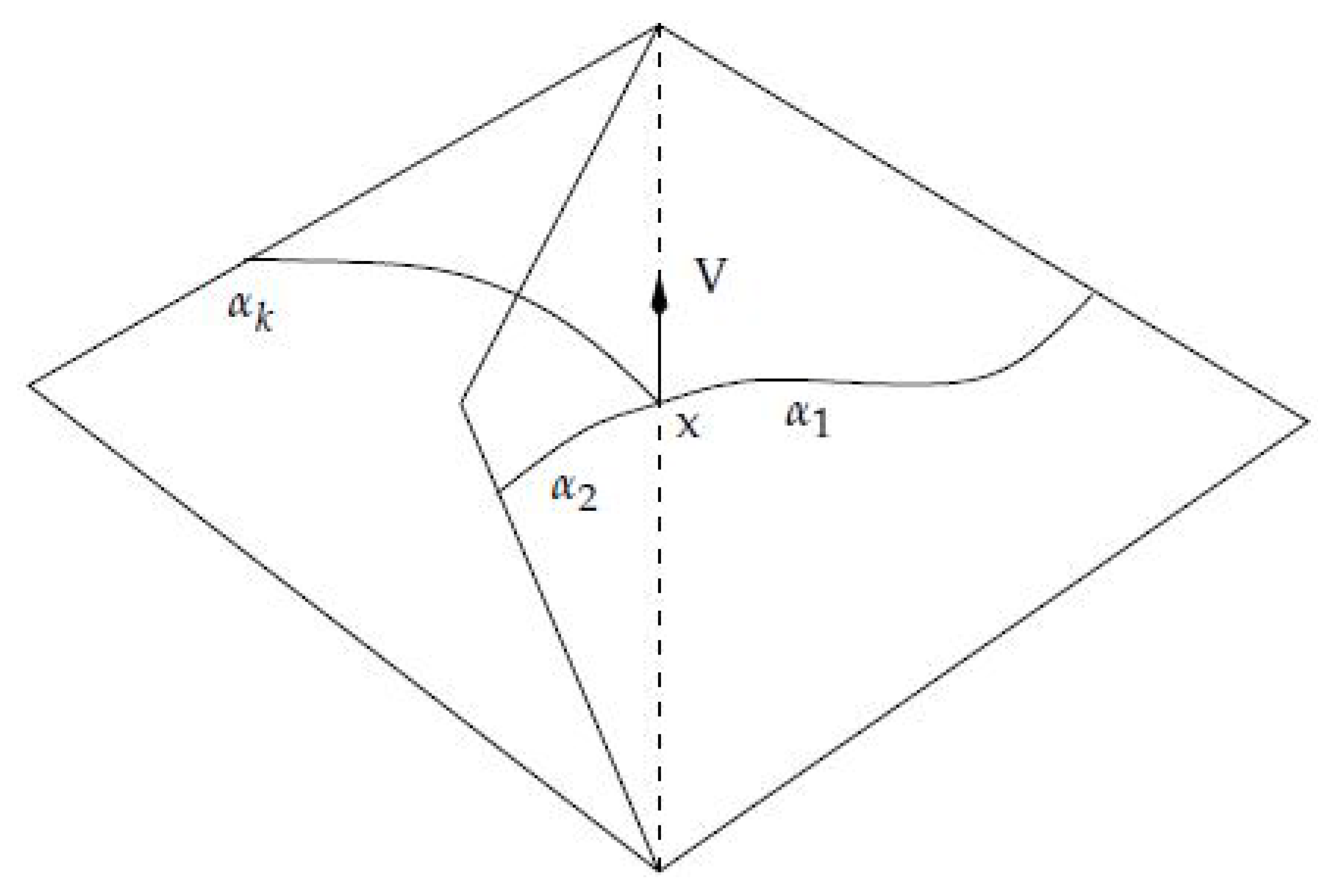
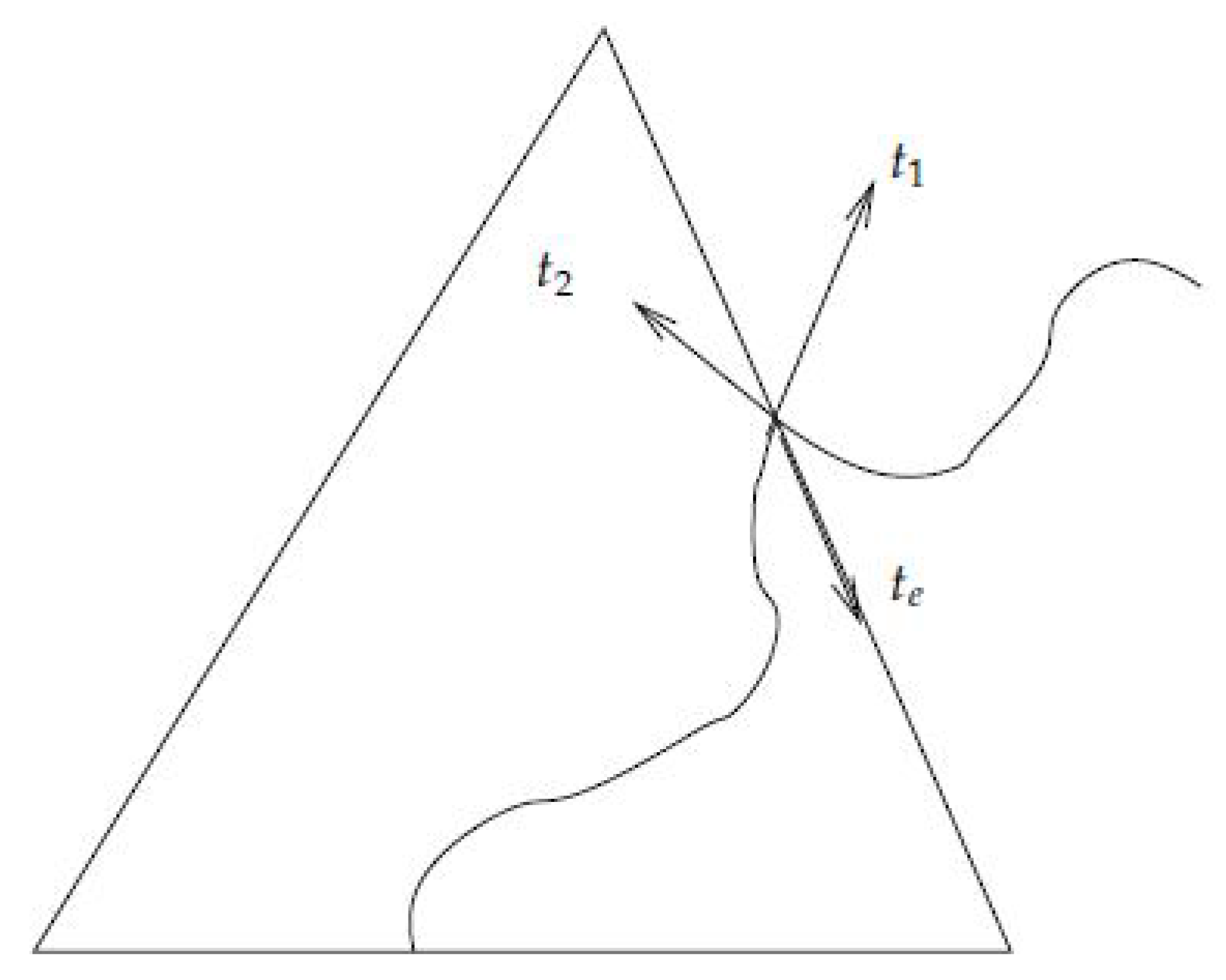
- If x is a point of lying in the interior of a 2-simplex, then definewhere here stands for the tangent vector of α at x and ∇ denotes covariant derivative. Hence, at an internal point is the geodesic curvature of α considered as an arc embedded in a triangular face of the triangulation (assume α is arc-length parameterized).
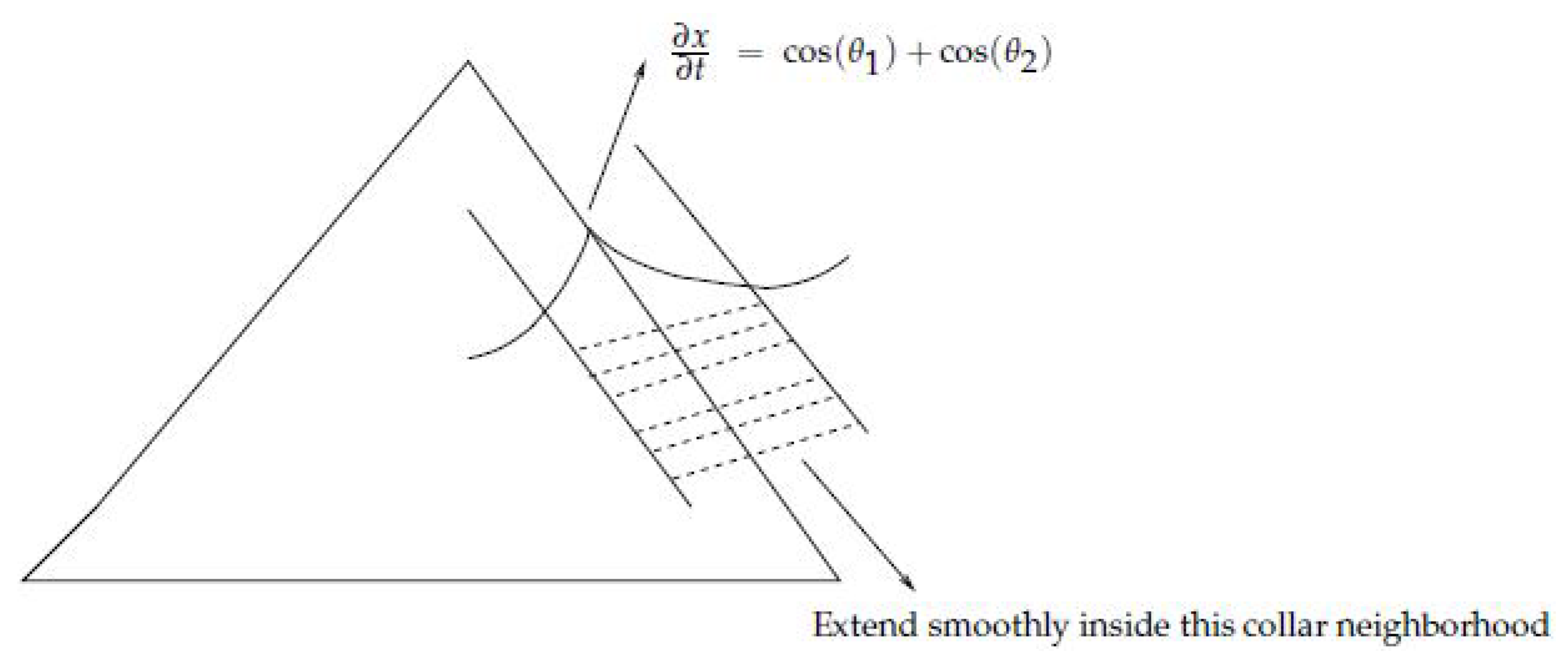
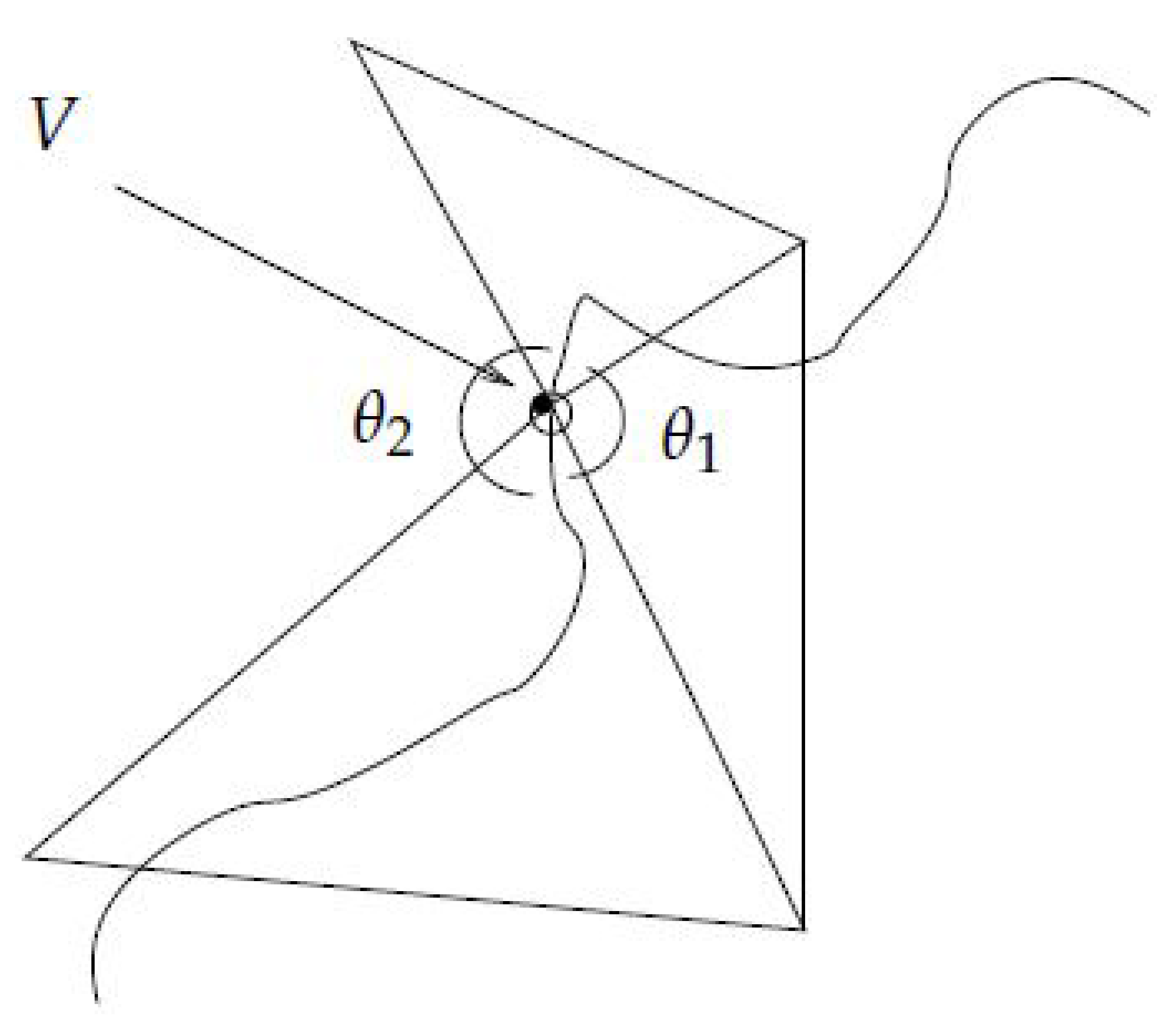
- If is an end point of α, let be all arcs of emanating from x, and definewhere is the tangent vector of at x and is a vector tangent to the edge e of T where x is included. here is the sum of all co-sines of the angles between the s and .
Appendix E. Mean Curvature Flow
Appendix F. -Minimal Surfaces and Approximation of Least Area Surfaces
References
- Haken, W. Theorie der normalflachen. Acta Math. 1961, 105, 245–375. [Google Scholar] [CrossRef]
- Jaco, W.; Rubinstein, J.H. PL-Minimal surfaces in 3-manifolds. J. Differ. Geom. 1988, 27, 493–524. [Google Scholar] [CrossRef]
- Meeks, W.H., III; Simon, L.; Yau, S.T. Embedded minimal surface, exotic spheres and manifolds with positive ricci curvature. Ann. Math. 1982, 116, 621–659. [Google Scholar]
- Caselles, V.; Kimmel, R.; Sapiro, G. Geodesic Active Countours. Int. J. Comput. Vis. 1997, 22, 61–79. [Google Scholar] [CrossRef]
- Grayson, M. Shortening embedded curves. Ann. Math. 1989, 129, 71–111. [Google Scholar] [CrossRef]
- Grayson, M. The heat equation shrinks embedded curves to round points. J. Differ. Geom. 1987, 26, 285–314. [Google Scholar] [CrossRef]
- Hass, J.; Scott, P. Shortening Curves on Surfaces. Topology 1994, 33, 25–43. [Google Scholar] [CrossRef]
- Kimmel, R.; Malladi, R.; Sochen, N. Images as embedded maps and minimal surfaces. Int. J. Comput. Vis. 2000, 39, 111–129. [Google Scholar] [CrossRef]
- Breslin, W. Thick triangulations of hyperbolic n-manifolds. Pacific J. Math. 2009, 241, 215–225. [Google Scholar] [CrossRef]
- Cairns, S.S. A simple triangulation method for smooth manifolds. Bull. Am. Math. Soc. 1961, 67, 389–390. [Google Scholar] [CrossRef]
- Peltonen, K. On the Existence of Quasiregular Mappings; Annales Academiae Scientiarum Fennicae. Series A. I, Mathematica, Dissertationes; Suomalainen Tiedeakatemia: Helsinki, Finland, 1992. [Google Scholar]
- Saucan, E. The existence of quasimeromorphic mappings in dimension 3. Conform. Geom. Dyn. 2006, 10, 21–40. [Google Scholar] [CrossRef]
- Saucan, E. Note on a theorem of Munkres. Mediterr. J. Math. 2005, 2, 215–229. [Google Scholar] [CrossRef]
- Munkres, J. Elementary differential topology; Princeton University Press: Princeton, NJ, USA, 1966. [Google Scholar]
- Morvan, J.-M.; Thibet, B. Approximation of the normal vector field and the area of a smooth surface. Disc. Comp. Geom. 2004, 32, 383–400. [Google Scholar] [CrossRef]
- Cheeger, J.; Ebin, D. Comparison Theorems in Riemannian Geometry; North-Holland Mathematical Library; American Mathematical Society: Providence, RI, USA, 1975; p. 9. [Google Scholar]
- Sullivan, J.M. Curves of finite total curvature. Disc. Diff. Geom. 2008, 38, 137–161. [Google Scholar]
- Dijekstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Kneser, H. Geschlossene flachen in drei-dimesnionalen Mannigfaltigkeiten. Jahresbericht der Deutschen Mathematiker-Vereinigung 1929, 38, 248–259. [Google Scholar]
- Thompson, A. Thin position and the recognition of 𝕊3. Math. Res. Lett. 1994, 1, 613–630. [Google Scholar] [CrossRef]
- Jaco, W.; Oertel, U. An Algorithm to decide if a 3-Manifold is a Haken Manifold. Topology 1984, 23, 195–209. [Google Scholar] [CrossRef]
- Stocking, M. Almost normal surfaces in 3-manifolds. Trans. Am. Math. Soc. 2003, 352, 171–207. [Google Scholar] [CrossRef]
- Meeks, W.H., III; Yau, S.T. Topology of three dimensional manifolds and the embedding problem in minimal surface theory. Ann. Math. 1980, 112, 441–484. [Google Scholar] [CrossRef]
- Meeks, W.H., III; Yau, S.T. The Classical Plateau problem and the topology of three dimensional manifolds. Topology 1982, 21, 409–442. [Google Scholar] [CrossRef]
- Meeks, W.H., III; Yau, S.T. The Existence of embedded minimal surfaces and the problem of uniqueness. Math. Z. 1982, 179, 151–168. [Google Scholar] [CrossRef]
- Huisken, G. Flow by mean curvaature of convex surfaces into spheres. J. Differ. Geom. 1984, 20, 237–266. [Google Scholar] [CrossRef]
- Ni, Y. Uniqueness of PL minimal surfaces. Acta Math. Sin. 2007, 23, 961–964. [Google Scholar] [CrossRef]


© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Appleboim, E. From Normal Surfaces to Normal Curves to Geodesics on Surfaces. Axioms 2017, 6, 26. https://doi.org/10.3390/axioms6030026
Appleboim E. From Normal Surfaces to Normal Curves to Geodesics on Surfaces. Axioms. 2017; 6(3):26. https://doi.org/10.3390/axioms6030026
Chicago/Turabian StyleAppleboim, Eli. 2017. "From Normal Surfaces to Normal Curves to Geodesics on Surfaces" Axioms 6, no. 3: 26. https://doi.org/10.3390/axioms6030026
APA StyleAppleboim, E. (2017). From Normal Surfaces to Normal Curves to Geodesics on Surfaces. Axioms, 6(3), 26. https://doi.org/10.3390/axioms6030026