
Note on Iterations of Nonlinear Rational Functions



Abstract
1. Introduction
2. Iterations of Nonlinear Rational Functions
- (a)
- By assertion (iii) of Theorem 1, (15) is a characteristic polynomial of a linear autonomous difference equation
- (b)
- (c)
- Moreover, if , then all , where is a real quadratic field.
- (d)
3. Analytical Link Between System (1) and Generalized Balancing Sequences
4. Asymptotic Behavior of the Solution of System (1)
- Locally asymptotic stability (LAS)The linear form of the system about the point of equilibrium can be expressed aswhereandThe polynomial associated with the characteristic equation of J isNext, we define the two functions as followsSinceAccording to Rouche’s Theorem, the functions and share the same number of zeros within the unit disk . Given that has a root at with multiplicity , it follows that all the zeros of P lie inside the unit disk. Therefore, the equilibrium point is LAS.
- Globally attractiveTo prove this, we will use Corollary 1, which provides the solution to system (1). By applying its results, we will demonstrate that every solution of the system converges to the desired equilibrium over time, thereby confirming its globally attractive nature. We haveUsing the following two limitswe obtainHowever, we haveBy means of the following two limitswe obtainSo,Using an argument similar to the above, it follows thatHence
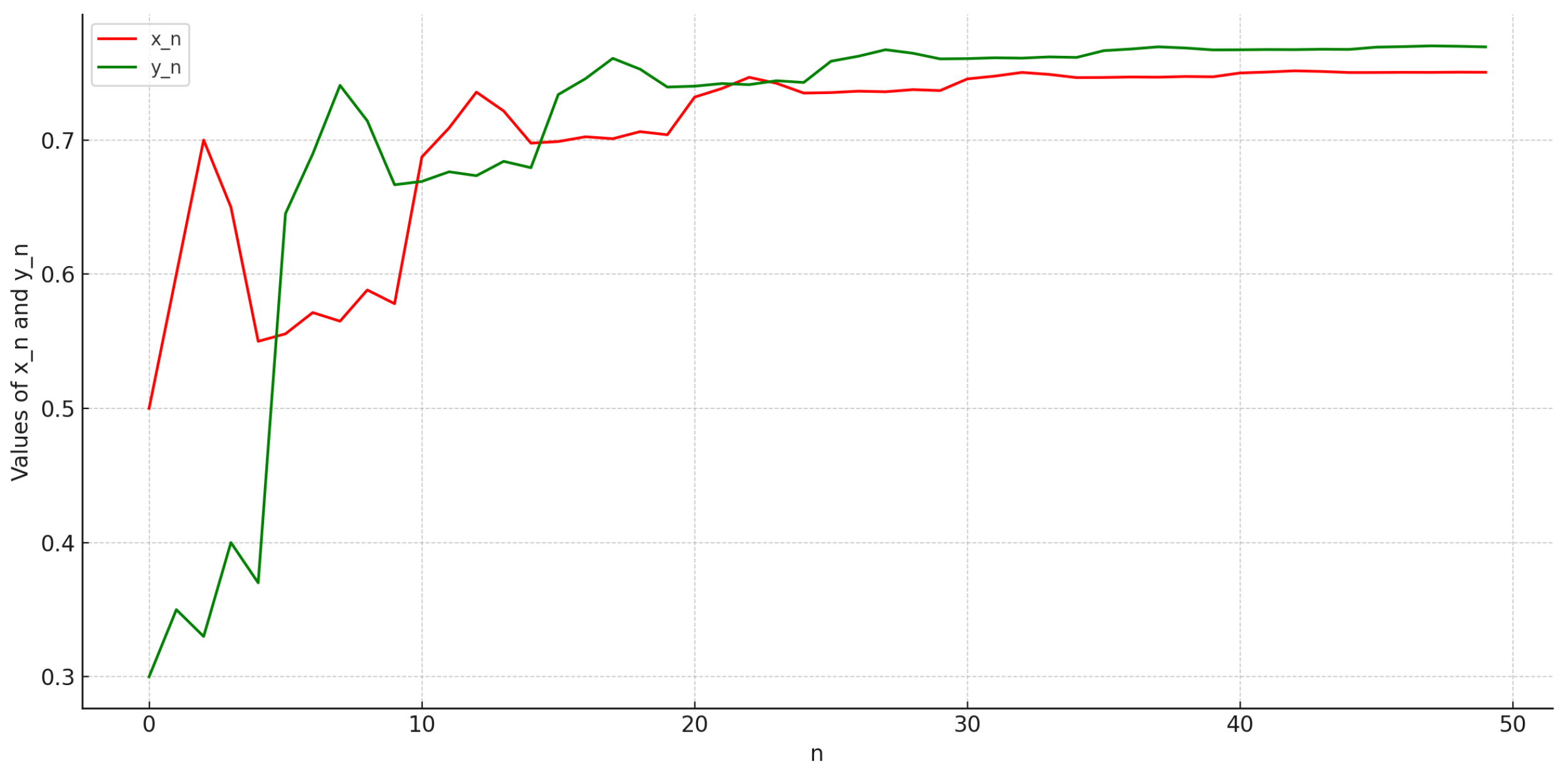
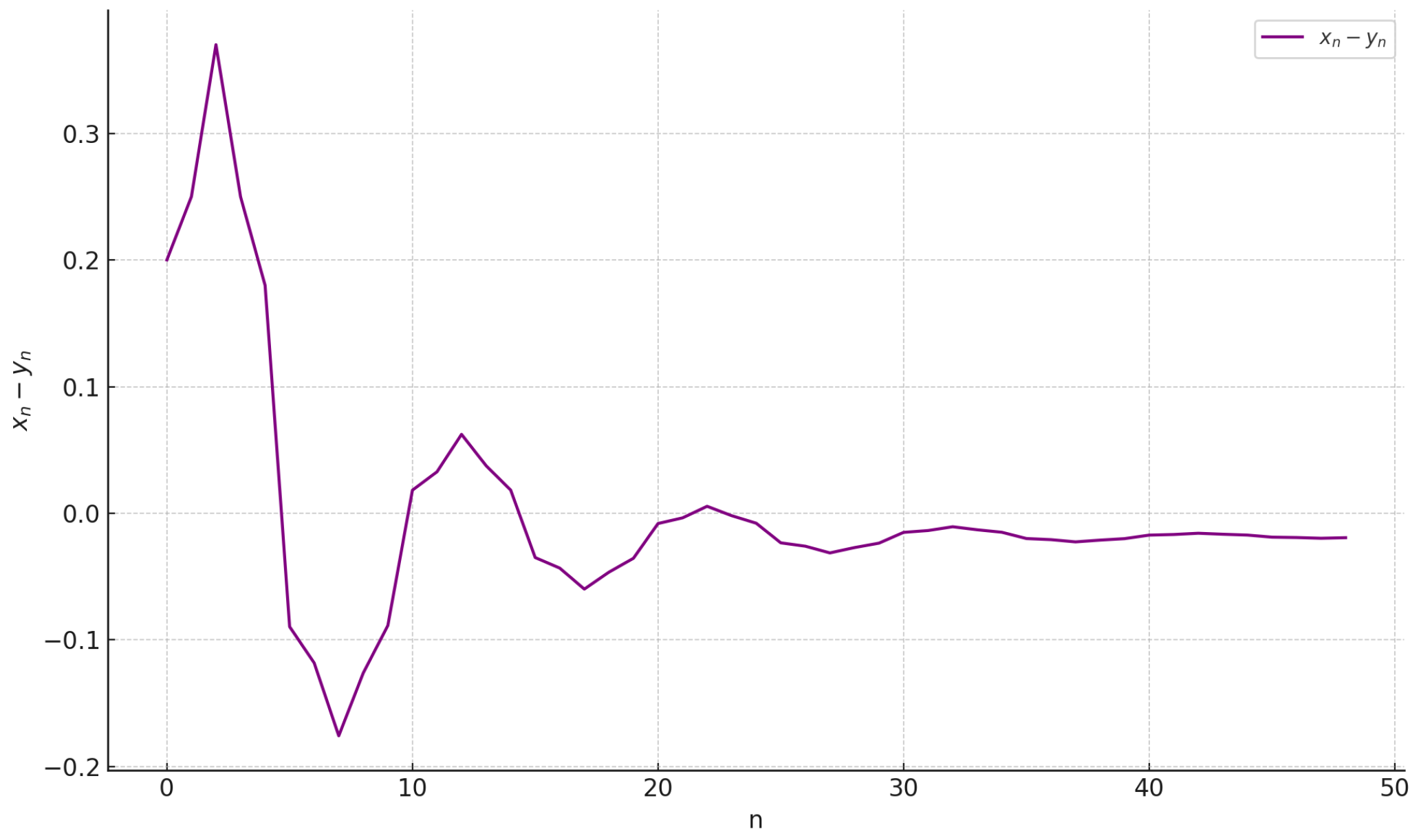
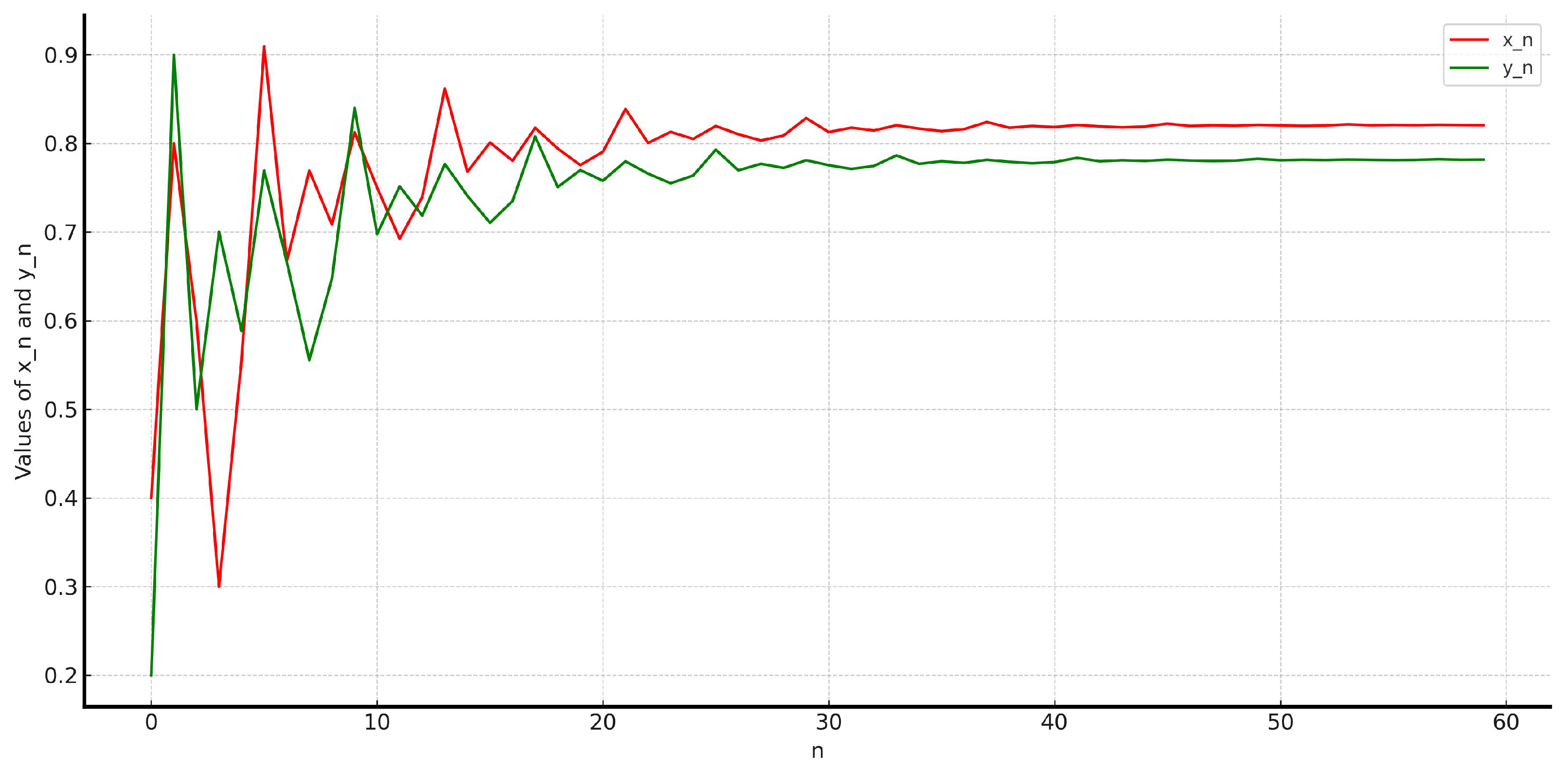
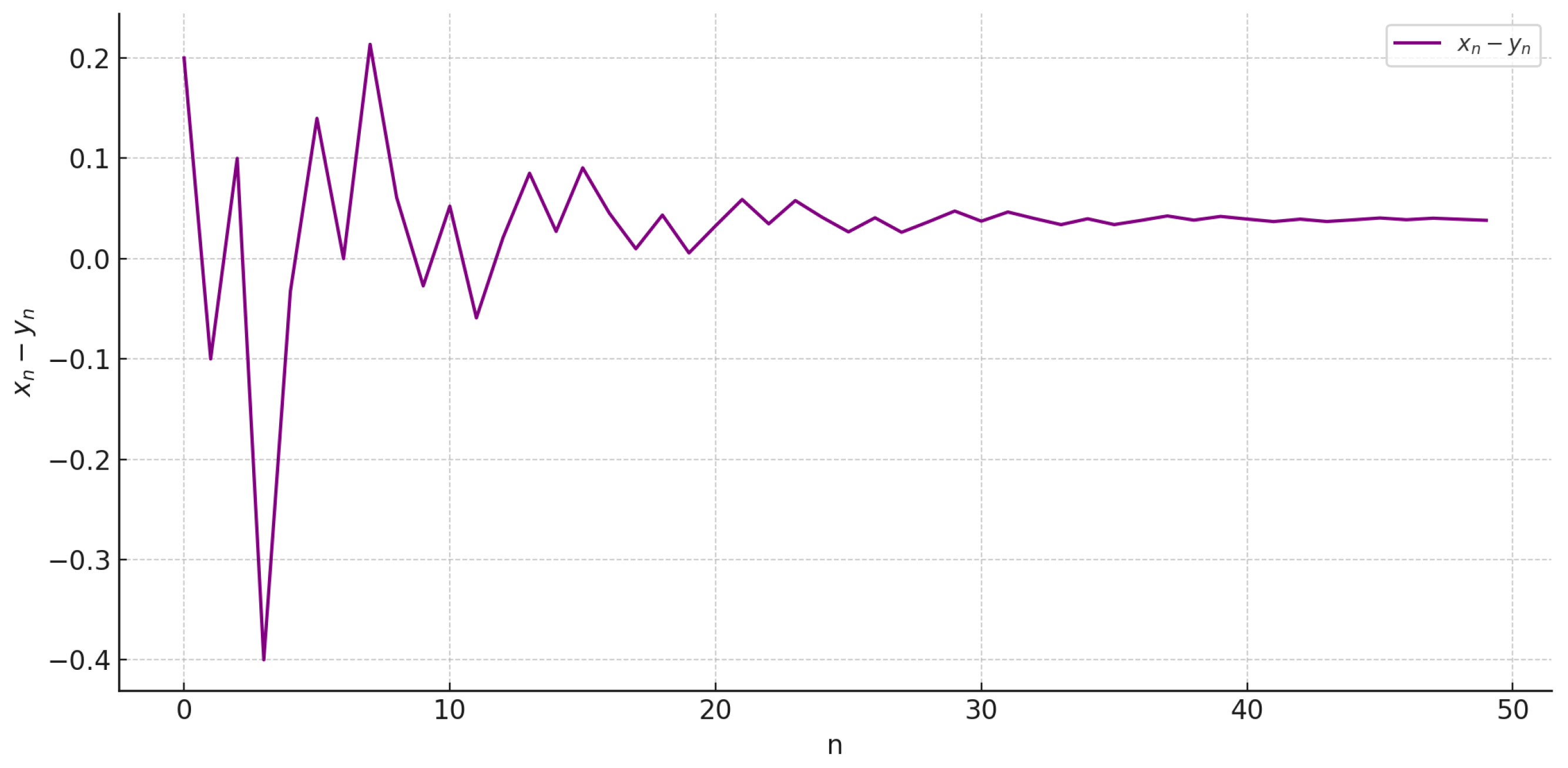
5. Numerical Examples
- , , , ,
- , , , ,
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Kocic, V.L.; Ladas, G. Global Behavior of Nonlinear Difference Equations of Higher Order with Applications; Springer Science & Business Media: Dordrecht, The Netherlands, 1993; Volume 256. [Google Scholar]
- Kulenovic, M.R.; Ladas, G. Dynamics of Second Order Rational Difference Equations: With Open Problems and Conjectures; Chapman and Hall/CRC: Boca Raton, FL, USA, 2001. [Google Scholar]
- Amleh, A.M.; Camouzis, E.; Ladas, G. On the dynamics of a rational difference equation, part I. Int. J. Differ. Equ. 2008, 3, 1–35. [Google Scholar]
- Elsayed, E.M. On a system of two nonlinear difference equations of order two. Proc. Jangjeon Math. Soc. 2015, 18, 353–368. [Google Scholar]
- Elsayed, E.M. Solution for systems of difference equations of rational form of order two. Comput. Appl. Math. 2014, 33, 751–765. [Google Scholar] [CrossRef]
- Elsayed, E.M. On the solutions and periodic nature of some systems of difference equations. Int. J. Biomath. 2014, 7, 1450067. [Google Scholar] [CrossRef]
- Gümüş, M.; Soykan, Y. Global character of a six-dimensional nonlinear system of difference equations. Discret. Dyn. Nat. Soc. 2016, 55, 6842521. [Google Scholar] [CrossRef]
- Gümüş, M. Analysis of periodicity for a new class of non-linear difference equations by using a new method. Electron. J. Math. Anal. Appl. 2020, 8, 109–116. [Google Scholar]
- Gümüş, M. Global asymptotic behavior of a discrete system of difference equations with delays. Filomat 2023, 37, 251–264. [Google Scholar] [CrossRef]
- Kara, M.; Yazlik, Y. Solvability of a system of nonlinear difference equations of higher order. Turk. J. Math. 2019, 43, 1533–1565. [Google Scholar] [CrossRef]
- Kara, M.; Yazlik, Y.; Touafek, N.; Akrour, Y. On a three-dimensional system of difference equations with variable coefficients. J. Appl. Math. Inform. 2021, 39, 1533–1565. [Google Scholar]
- Touafek, N. On a general system of difference equations defined by homogeneous functions. Math. Slovaca 2021, 71, 697–720. [Google Scholar] [CrossRef]
- Yazlik, Y.; Tollu, D.T.; Taskara, N. Behaviour of solutions for a system of two higher-order difference equations. J. Sci. Arts 2018, 45, 813–826. [Google Scholar]
- Yazlik, Y.; Kara, M. On a solvable system of difference equations of higher-order with period two coefficients. Commun. Fac. Sci. Univ. Ank. Ser. A1 Math. Stat. 2019, 68, 1675–1693. [Google Scholar] [CrossRef]
- Wang, Z.; He, G.; Wang, Y.; Fan, J.; Zhang, Y.; Chai, Y.; Lu, S.J. Wave propagation in finite discrete chains unravelled by virtual measurement of dispersion properties. IET Sci. Meas. Technol. 2024, 18, 280–288. [Google Scholar] [CrossRef]
- Guo, S.; Li, Y.; Wang, D. 2-Term Extended Rota–Baxter Pre-Lie ∞-Algebra and Non-Abelian Extensions of Extended Rota–Baxter Pre-Lie Algebras. Result. Math. 2025, 80, 1–30. [Google Scholar] [CrossRef]
- Yue, P. Uncertain Numbers. Mathematics 2025, 13, 496. [Google Scholar] [CrossRef]
- Elsayed, E.M. Solutions of rational difference systems of order two. Math. Comput. Model. 2012, 55, 378–384. [Google Scholar] [CrossRef]
- Li, W.; Sun, H. Dynamics of a rational difference equation. Appl. Math. Comput. 2005, 163, 577–591. [Google Scholar] [CrossRef]
- Touafek, N. On a second order rational difference equation. Hacet. J. Math. Stat. 2012, 41, 867–874. [Google Scholar]
- Halim, Y.; Bayram, M. On the solutions of a higher-order difference equation in terms of generalized Fibonacci sequences. Math. Methods Appl. Sci. 2016, 39, 2974–2982. [Google Scholar] [CrossRef]
- Halim, Y. A system of difference equations with solutions associated to Fibonacci numbers. Int. J. Differ. Equ. 2016, 11, 65–77. [Google Scholar]
- Hamioud, H.; Dekkar, I.; Touafek, N. Solvability of a third-order system of nonlinear difference equations via a generalized Fibonacci sequence. Miskolc Math. Notes 2024, 25, 271–285. [Google Scholar] [CrossRef]
- Halim, Y.; Rabago, J.F.T. On the solutions of a second-order difference equations in terms of generalized Padovan sequences. Math. Slovaca 2018, 68, 625–638. [Google Scholar] [CrossRef]
- Kara, M.; Yazlik, Y. On eight solvable systems of difference equations in terms of generalized Padovan sequences. Miskolc Math. Notes 2021, 22, 695–708. [Google Scholar] [CrossRef]
- Kara, M.; Yazlik, Y. Representation of solutions of eight systems of difference equations via generalized Padovan sequences. Int. J. Nonlinear Anal. Appl. 2021, 12, 447–471. [Google Scholar]
- Halim, Y.; Khelifa, A.; Berkal, M. Solutions of a system of two higher-order difference equations in terms of Lucas sequence. Univers. J. Math. Appl. 2019, 2, 202–211. [Google Scholar] [CrossRef]
- Taşkara, N.; Büyük, H. On the solutions of three-dimensional difference equation systems via pell numbers. Avrupa Bilim Teknol. Derg. 2022, 34, 433–440. [Google Scholar] [CrossRef]
- Kaouache, S.; Fečkan, M.; Halim, Y.; Khelifa, A. Theoretical analysis of higher-order system of difference equations with generalized balancing numbers. Math. Slovaca 2024, 74, 691–702. [Google Scholar] [CrossRef]
- Arikoglu, A.; Ozkol, I. Solution of differential–difference equations by using differential transform method. Appl. Math. Comput. 2006, 181, 153–162. [Google Scholar] [CrossRef]
- Bérczes, A.; Liptai, K.; Pink, I. On generalized balancing sequences. Fibonacci Q. 2010, 48, 121–128. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| n | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 0.5000 | 0.6000 | 0.7000 | 0.6500 | 0.5500 | 0.5556 | 0.5714 | 0.5650 | |
| 0.3000 | 0.3500 | 0.3300 | 0.4000 | 0.3700 | 0.6452 | 0.6897 | 0.7407 | |
| n | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 0.5882 | 0.5780 | 0.6874 | 0.7090 | 0.7357 | 0.7216 | 0.6977 | 0.6989 | |
| 0.7143 | 0.6667 | 0.6691 | 0.6763 | 0.6734 | 0.6841 | 0.6794 | 0.7339 | |
| n | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 0.7024 | 0.7010 | 0.7063 | 0.7039 | 0.7320 | 0.7384 | 0.7467 | 0.7423 | |
| 0.7457 | 0.7609 | 0.7528 | 0.7395 | 0.7401 | 0.7421 | 0.7413 | 0.7442 | |
| n | 24 | 25 | 26 | 27 | 28 | 29 | 30 | 31 |
| 0.7350 | 0.7354 | 0.7364 | 0.7360 | 0.7376 | 0.7369 | 0.7456 | 0.7476 | |
| 0.7429 | 0.7587 | 0.7624 | 0.7673 | 0.7647 | 0.7605 | 0.7607 | 0.7613 |
| n | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 0.4000 | 0.8000 | 0.6000 | 0.3000 | 0.5556 | 0.9091 | 0.6667 | 0.7692 | |
| 0.2000 | 0.9000 | 0.5000 | 0.7000 | 0.5882 | 0.7692 | 0.6667 | 0.5556 | |
| n | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 0.7083 | 0.8125 | 0.7500 | 0.6923 | 0.7394 | 0.8618 | 0.7679 | 0.8009 | |
| 0.6475 | 0.8397 | 0.6977 | 0.7514 | 0.7186 | 0.7767 | 0.7407 | 0.7104 | |
| n | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 0.7804 | 0.8175 | 0.7941 | 0.7754 | 0.7905 | 0.8387 | 0.8004 | 0.8129 | |
| 0.7349 | 0.8077 | 0.7507 | 0.7698 | 0.7578 | 0.7797 | 0.7658 | 0.7550 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fečkan, M.; Khelifa, A.; Halim, Y.; Alsulami, I.M. Note on Iterations of Nonlinear Rational Functions. Axioms 2025, 14, 450. https://doi.org/10.3390/axioms14060450
Fečkan M, Khelifa A, Halim Y, Alsulami IM. Note on Iterations of Nonlinear Rational Functions. Axioms. 2025; 14(6):450. https://doi.org/10.3390/axioms14060450
Chicago/Turabian StyleFečkan, Michal, Amira Khelifa, Yacine Halim, and Ibraheem M. Alsulami. 2025. "Note on Iterations of Nonlinear Rational Functions" Axioms 14, no. 6: 450. https://doi.org/10.3390/axioms14060450
APA StyleFečkan, M., Khelifa, A., Halim, Y., & Alsulami, I. M. (2025). Note on Iterations of Nonlinear Rational Functions. Axioms, 14(6), 450. https://doi.org/10.3390/axioms14060450