
On the Convergence Order of Jarratt-Type Methods for Nonlinear Equations

 ,
,  and
and 
Abstract
1. Introduction
2. Convergence Order of Iterative Scheme (3)
- (A1)
- exists and ∃ such that
- (A2)
- ∃ such that
- (A3)
- ∃ such thatand
- (A4)
- ∃ such that
3. Analysis of Convergence Order of (2)
4. Analysis of Convergence Order of (4)
5. Convergence Under Generalized Conditions
- (H1)
- Consider a CNF for which the smallest positive solution to is . Let be the interval .
- (H2)
- Let be the SPS of , where the function is given byfor some CNF
- (H3)
- Let have an SPS given as where is given byLet
- (H4)
- The equation has an SPS denoted by where is given bywhere
- (H5)
- The equation has an SPS denoted by where is given byLet
- (H6)
- The equation has an SPS denoted by where is given aswhere
- (H7)
- There exists an invertible linear operator L and solving the equation such that for each ,
- (H8)
- for eachand
- (H9)
- (e1)
- There exist as CNF such that has an SPS denoted bySet Let be a CNF. Define the sequence for and each byand
- (e2)
- There exists such thatfor each Consequently, and there exists such thatThe functions and are connected to the operators on the iterative scheme given in (4).
- (e3)
- There exists such thatLet Notice that (e1) and (e3) imply that operator is invertible. Let
- (e4)
- for each and
- (e5)
6. Efficiency Indices
7. Numerical Example
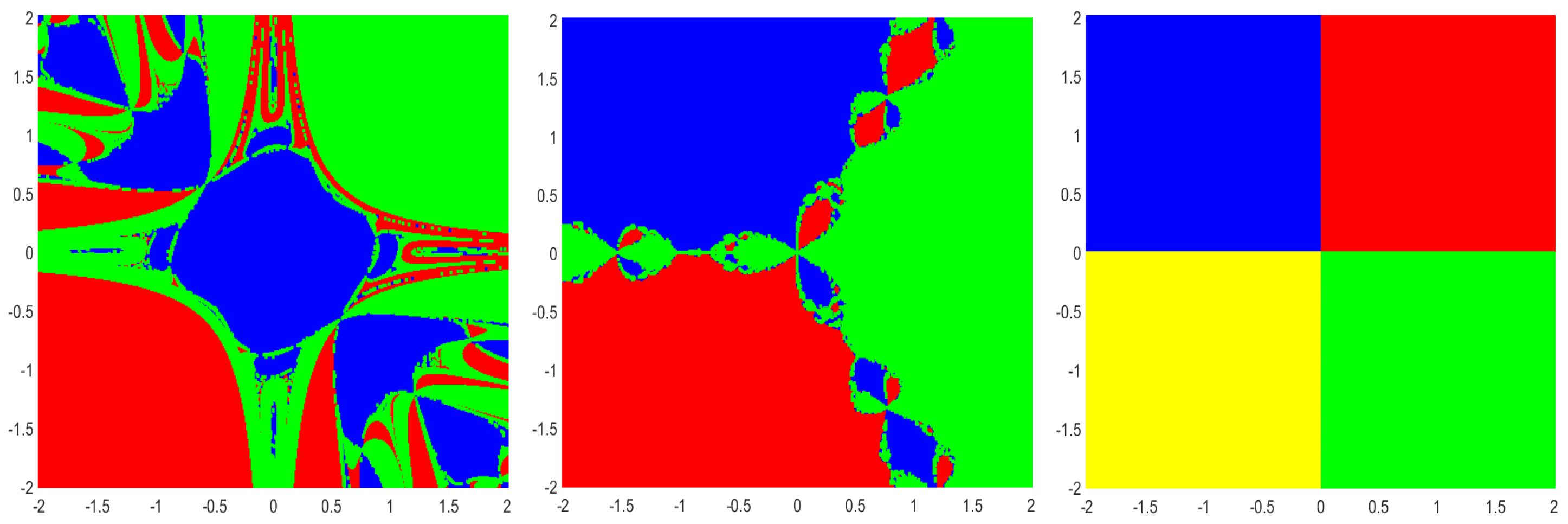
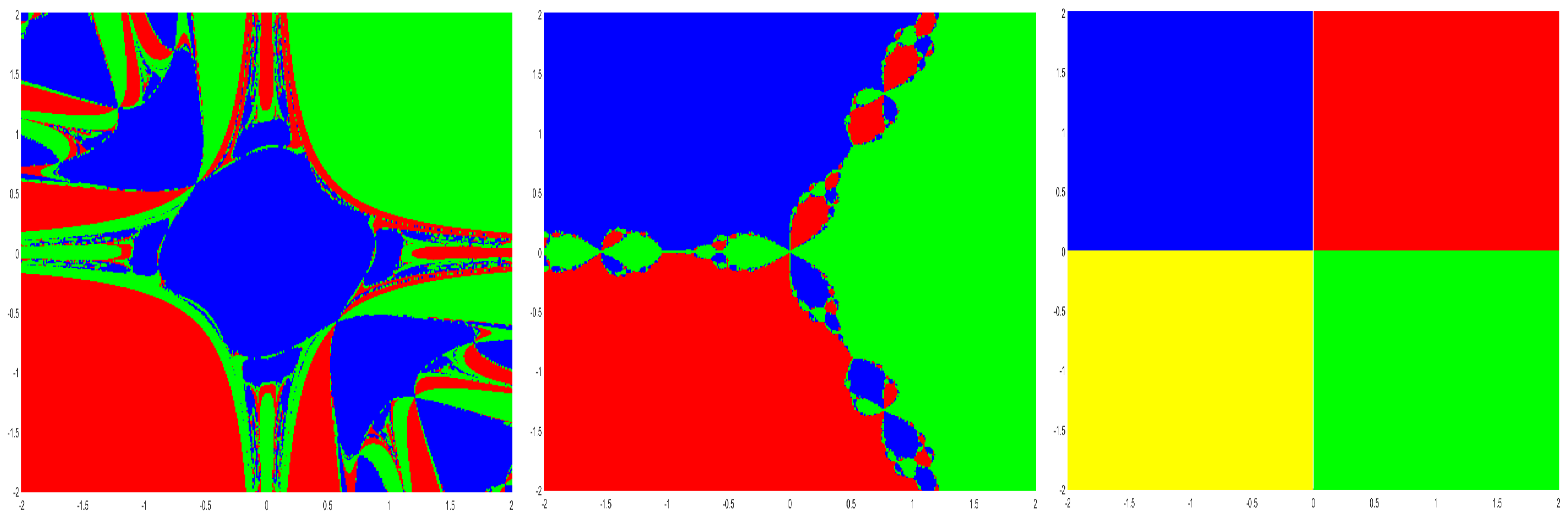
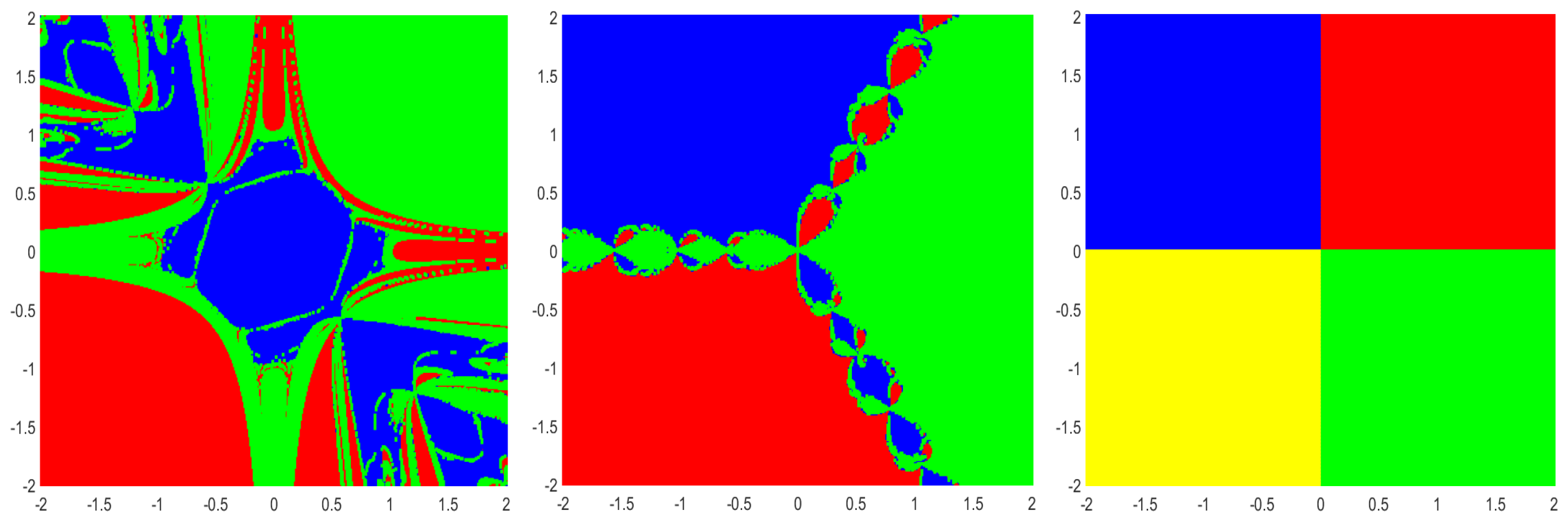
8. Basins of Attraction
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ahmad, F.; Tohidi, E.; Ullah, M.Z. Higher order multi-step Jarratt-like method for solving systems of nonlinear equations: Application to PDEs and ODEs. Comput. Math. Appl. 2015, 70, 624–636. [Google Scholar] [CrossRef]
- Ullah, M.Z.; Serra-Capizzano, S.; Ahmad, F. An efficient multi-step iterative method for computing the numerical solution of systems of nonlinear equations associated with ODEs. Appl. Math. Comput. 2015, 250, 249–259. [Google Scholar] [CrossRef]
- Argyros, I.K. The Theory and Applications of Iteration Methods; Taylor and Francis Group, CRC Press: Boca Raton, FL, USA, 2022; Volume 2. [Google Scholar]
- Ullah, M.Z.; Soleymani, F.; Al-Fhaid, A.S. Numerical solution of nonlinear systems by a general class of iterative methods with application to nonlinear PDEs. Numer. Algorithms 2014, 67, 223–242. [Google Scholar] [CrossRef]
- Yu, J.; Wang, X. A single parameter fourth-order Jarratt type iterative method for solving nonlinear systems. AIMS Math. 2025, 10, 7847–7863. [Google Scholar] [CrossRef]
- Bartle, R.G. Newton’s method in Banach spaces. Proc. Am. Math. Soc. 1955, 6, 827–831. [Google Scholar]
- Ben-Israel, A. A Newton-Raphson method for the solution of systems of equations. J. Math. Anal. Appl. 1966, 15, 243–252. [Google Scholar] [CrossRef]
- Jarratt, P. Some fourth order multipoint iterative methods for solving equations. Math. Comput. 1966, 20, 434–437. [Google Scholar] [CrossRef]
- Saheya, B.; Chen, G.Q.; Sui, Y.K.; Wu, C.Y. A new Newton-like method for solving nonlinear equations. SpringerPlus 2016, 5, 1269. [Google Scholar] [CrossRef]
- Ren, H.; Wu, Q.; Bi, W. New variants of Jarratt’s method with sixth-order convergence. Numer. Algorithms 2009, 52, 585–603. [Google Scholar] [CrossRef]
- Weerakoon, S.; Fernando, T. A variant of Newton’s method with accelerated third-order convergence. Appl. Math. Lett. 2000, 8, 87–93. [Google Scholar] [CrossRef]
- Petković, M.S.; Neta, B.; Petković, L.D.; Džunić, J. Multipoint methods for solving nonlinear equations: A survey. Appl. Math. Comput. 2014, 226, 635–660. [Google Scholar] [CrossRef]
- Cordero, A.; Hueso, J.L.; Martínez, E.; Torregrosa, J.R. A modified Newton-Jarratt’s composition. Numer. Algorithms 2010, 55, 87–99. [Google Scholar] [CrossRef]
- Behl, R.; Cordero, A.; Motsa, S.S.; Torregrosa, J.R. On developing fourth-order optimal families of methods for multiple roots and their dynamics. Appl. Math. Comput. 2015, 265, 520–532. [Google Scholar] [CrossRef]
- Magreñán, A.A. Different anomalies in a Jarratt family of iterative root finding methods. Appl. Math. Comput. 2014, 233, 29–38. [Google Scholar]
- Shakhno, S.M.; Iakymchuk, R.P.; Yarmola, H.P. Convergence analysis of a two step method for the nonlinear squares problem with decomposition of operator. J. Numer. Appl. Math. 2018, 128, 82–95. [Google Scholar]
- Shakhno, S.M.; Gnatyshyn, O.P. On an iterative algorithm of order 1.839… for solving nonlinear operator equations. Appl. Math. Appl. 2005, 161, 253–264. [Google Scholar]
- Cárdenas, E.; Castro, R.; Sierra, W. A Newton-type midpoint method with high efficiency index. J. Math. Anal. Appl. 2020, 491, 124381. [Google Scholar] [CrossRef]
- Traub, J.F. Iterative methods for the solution of equations. Am. Math. Soc. 1982, 312. [Google Scholar] [CrossRef]
- Ostrowski, A.M. Solution of Equations and Systems of Equations: Pure and Applied Mathematics; A Series of Monographs and Textbooks; Elsevier: Amsterdam, The Netherlands, 2016; Volume 9. [Google Scholar]
- Noor, M.A.; Waseem, M.; Noor, K.I. New iterative technique for solving a system of nonlinear equations. Appl. Math. Comput. 2015, 271, 446–466. [Google Scholar] [CrossRef]
- Alqahtani, H.F.; Behl, R.; Kansal, M. Higher-Order Iteration Schemes for Solving Nonlinear Systems of Equations. Mathematics 2019, 7, 937. [Google Scholar] [CrossRef]
- Jayakumar, J. Generalized Simpson-Newton’s Method for Solving Nonlinear Equations with Cubic Convergence. IOSR J. Math. 2013, 7, 58–61. [Google Scholar] [CrossRef]
- Iliev, A.; Iliev, I. Numerical method with order t for solving system nonlinear equations. Collect. Sci. Work. 2000, 30, 3–4. [Google Scholar]
- Chun, C.; Lee, M.Y.; Neta, B.; Džunić, J. On optimal fourth-order iterative methods free from second derivative and their dynamics. Appl. Math. Comput. 2012, 218, 6427–6438. [Google Scholar] [CrossRef]
- Scott, M.; Neta, B.; Chun, C. Basin attractors for various methods. Appl. Math. Comput. 2011, 218, 2584–2599. [Google Scholar] [CrossRef]
- Ortega, J.M.; Rheinboldt, W.C. Iterative solution of nonlinear equations in several variables. In Classics in Applied Mathematics, Philadelphia: Society for Industrial and Applied Mathematics; Academic Press: Cambridge, MA, USA, 2000; Volume 14. [Google Scholar]
- Werner, W. Über ein Verfahren der Ordnung 1 + zur Nullstellenbestimmung. Numer. Math. 1979, 32, 333–342. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| No. of Iterations (n) | Method (2) | Method (3) |
|---|---|---|
| 1 | (−0.285212504390587, 1.085353003161222) | (−0.291165568093180, 1.084718626530083) |
| 2 | (−0.290514555536393, 1.084215081898184) | (−0.290514555507251, 1.084215081491351) |
| 3 | (−0.290514555536393, 1.084215081898184) | (−0.290514555507251, 1.084215081491351) |
| 4 | (−0.290514555536393, 1.084215081898184) | (−0.290514555507251, 1.084215081491351) |
| k | Noor Waseem Method (65) | Ratio | Newton Simpson Method (68) | Ratio | Method (3) | Ratio |
|---|---|---|---|---|---|---|
| 0 | (2.000000, −1.000000) | (2.000000, −1.000000) | (2.000000, −1.000000) | |||
| 1 | (1.264067, −0.166747) | 0.052791 | (1.263927, −0.166887) | 0.052792 | (1.151437, 0.051449) | 0.040459 |
| 2 | (1.019624, 0.265386) | 0.259247 | (1.019452, 0.265424) | 0.259156 | (0.994771, 0.304342) | 0.536597 |
| 3 | (0.992854, 0.306346) | 1.578713 | (0.992853, 0.306348) | 1.580144 | (0.992780, 0.306440) | 1.951273 |
| 4 | (0.992780, 0.306440) | 1.977941 | (0.992780, 0.306440) | 1.977957 | (0.992780, 0.306440) | 1.979028 |
| 5 | (0.992780, 0.306440) | 1.979028 | (0.992780, 0.306440) | 1.979028 | (0.992780, 0.306440) | 1.979028 |
| k | Noor Waseem Method (66) | Ratio | Newton Simpson Method (69) | Ratio | Method (4) | Ratio |
|---|---|---|---|---|---|---|
| 0 | (2.000000, −1.000000) | (2.000000, −1.000000) | (2.000000, −1.000000) | |||
| 1 | (1.127204, 0.054887) | 0.004363 | (1.127146, 0.054883) | 0.004363 | (1.144528, 0.069067) | 0.004375 |
| 2 | (0.993331, 0.305731) | 0.501551 | (0.993328, 0.305734) | 0.501670 | (0.994305, 0.304922) | 0.495553 |
| 3 | (0.992780, 0.306440) | 3.889725 | (0.992780, 0.306440) | 3.889832 | (0.992780, 0.306440) | 3.847630 |
| 4 | (0.992780, 0.306440) | 3.916553 | (0.992780, 0.306440) | 3.916553 | (0.992780, 0.306440) | 3.916553 |
| k | Noor Waseem Method (67) | Ratio | Newton Simpson Method (70) | Ratio | Method (2) | Ratio |
|---|---|---|---|---|---|---|
| 0 | (2.000000, −1.000000) | (2.000000, −1.000000) | (2.000000, −1.000000) | |||
| 1 | (1.067979, 0.174843) | 0.001211 | (1.067906, 0.174885) | 0.001211 | (1.027012, 0.256566) | 0.001057 |
| 2 | (0.992784, 0.306436) | 1.383068 | (0.992784, 0.306436) | 1.384152 | (0.992780, 0.306440) | 3.122403 |
| 3 | (0.992780, 0.306440) | 5.509412 | (0.992780, 0.306440) | 5.509414 | (0.992780, 0.306440) | 5.509727 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Erappa, S.M.; Bheemaiah, S.P.; George, S.; Karuppaiah, K.; Argyros, I.K. On the Convergence Order of Jarratt-Type Methods for Nonlinear Equations. Axioms 2025, 14, 401. https://doi.org/10.3390/axioms14060401
Erappa SM, Bheemaiah SP, George S, Karuppaiah K, Argyros IK. On the Convergence Order of Jarratt-Type Methods for Nonlinear Equations. Axioms. 2025; 14(6):401. https://doi.org/10.3390/axioms14060401
Chicago/Turabian StyleErappa, Shobha M., Suma P. Bheemaiah, Santhosh George, Kanagaraj Karuppaiah, and Ioannis K. Argyros. 2025. "On the Convergence Order of Jarratt-Type Methods for Nonlinear Equations" Axioms 14, no. 6: 401. https://doi.org/10.3390/axioms14060401
APA StyleErappa, S. M., Bheemaiah, S. P., George, S., Karuppaiah, K., & Argyros, I. K. (2025). On the Convergence Order of Jarratt-Type Methods for Nonlinear Equations. Axioms, 14(6), 401. https://doi.org/10.3390/axioms14060401