
Exponential Stability of Dynamical Systems on Time Scales with Application to Multi-Agent Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
- 1.
- The forward jump operator is defined by
- 2.
- The graininess of the time scale is determined by
- 1.
- A function is called rd-continuous if it is continuous at right-dense points in and its left-side limits exist (finite) at left-dense points in .
- 2.
- A function is called regressive if holds for all , where if the maximum m of is left-scattered. Otherwise, . The set of all regressive and rd-continuous functions is denoted by .
- 3.
- If , the exponential function on time scales is defined bywhere .
- 1.
- 2.
- 3.
- The function is also elements of , where
- 4.
- .
- 5.
- .
3. Stability Analysis of Dynamical Systems with Time Delay on Time Scales
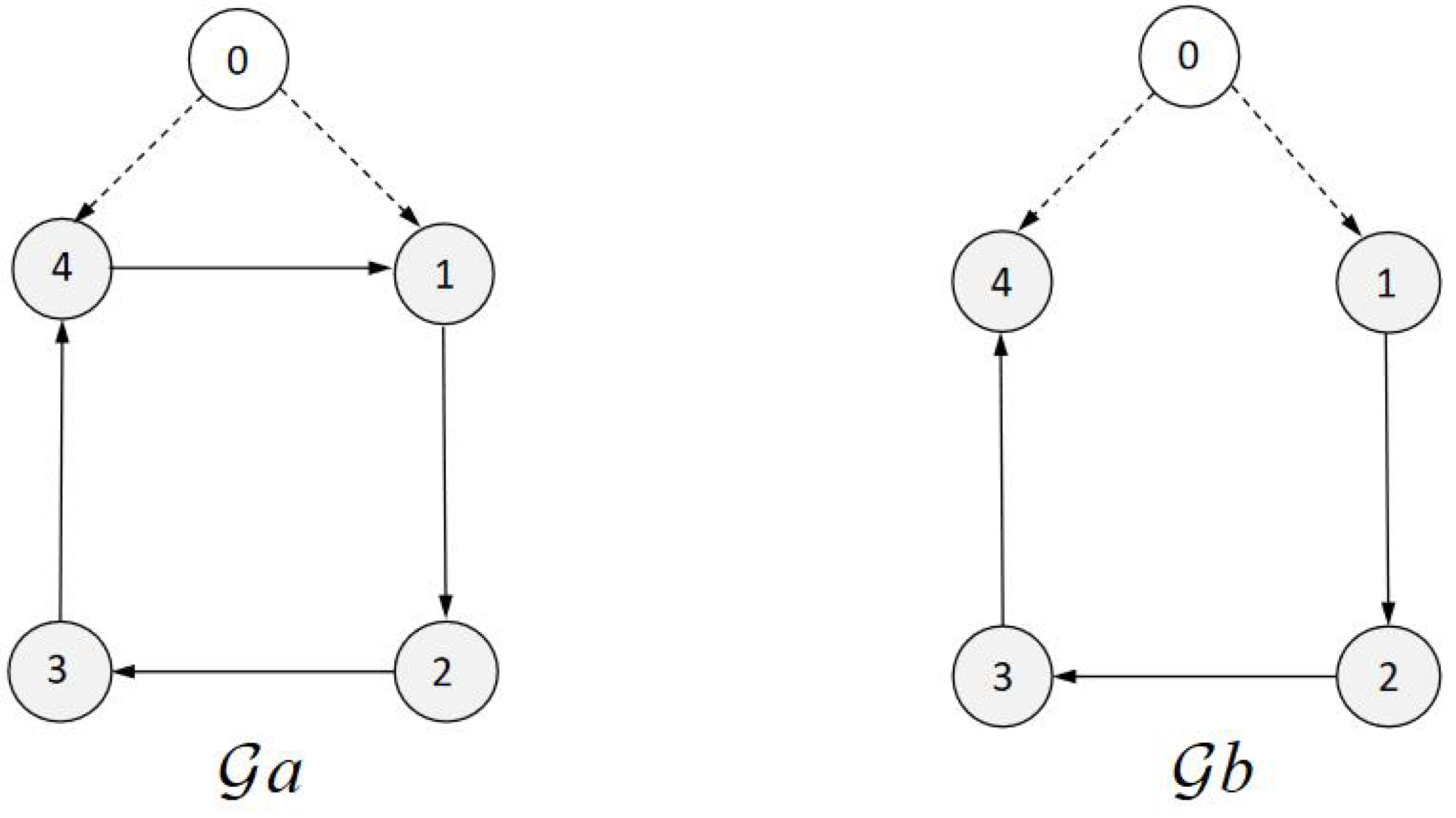
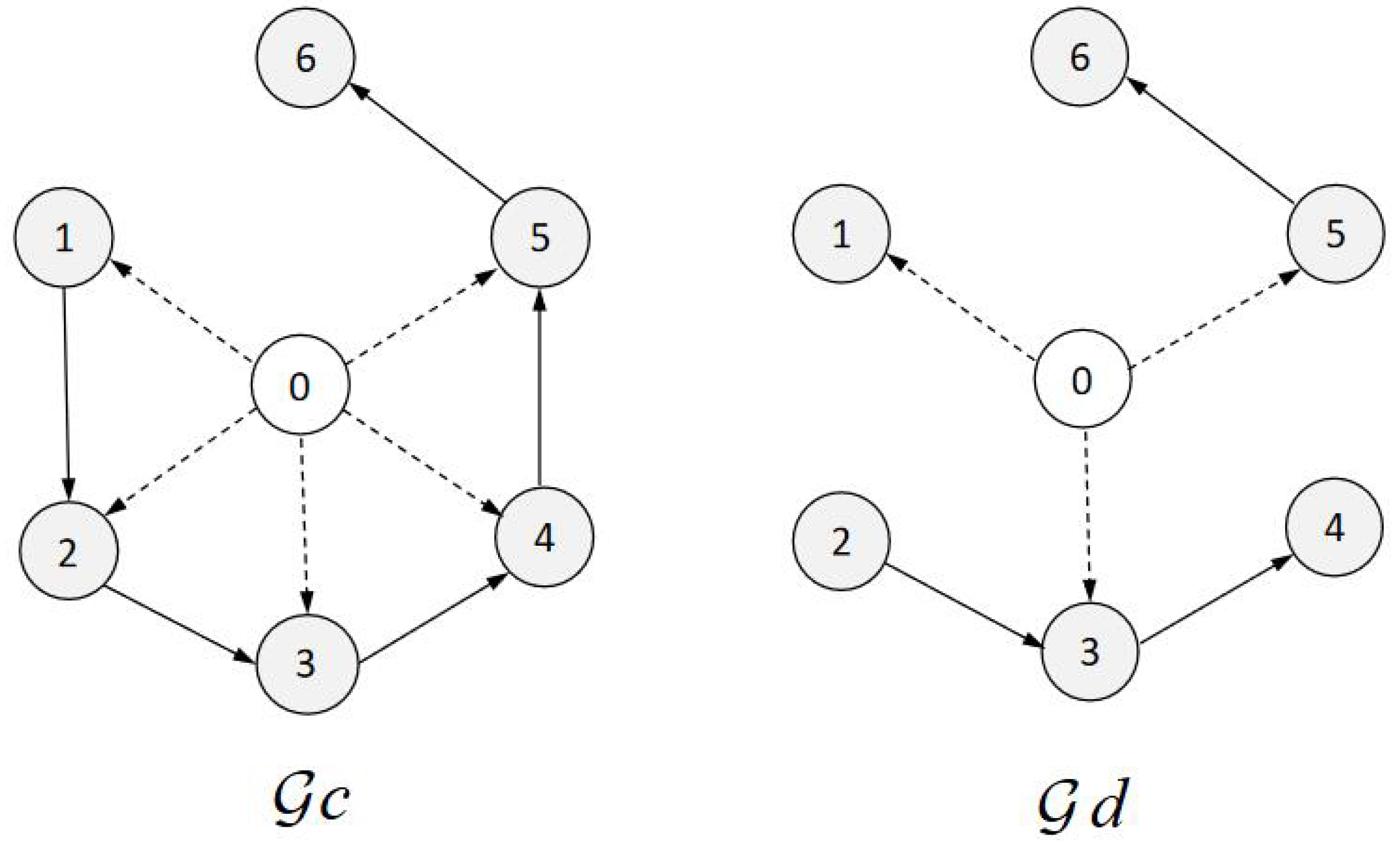
4. Some Applications in Consensus of Multi-Agent Systems
4.1. Consensus of Multi-Agent System
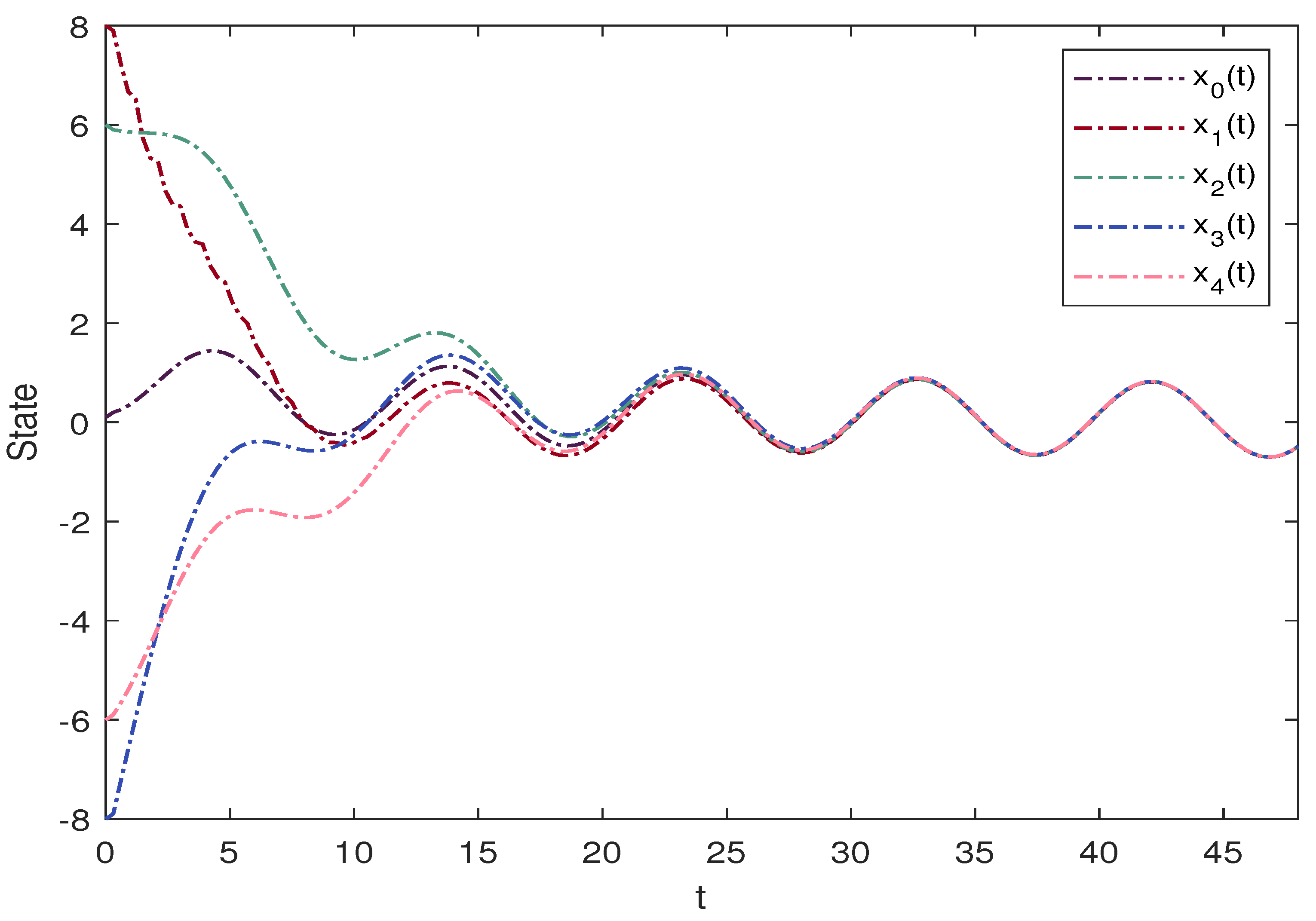
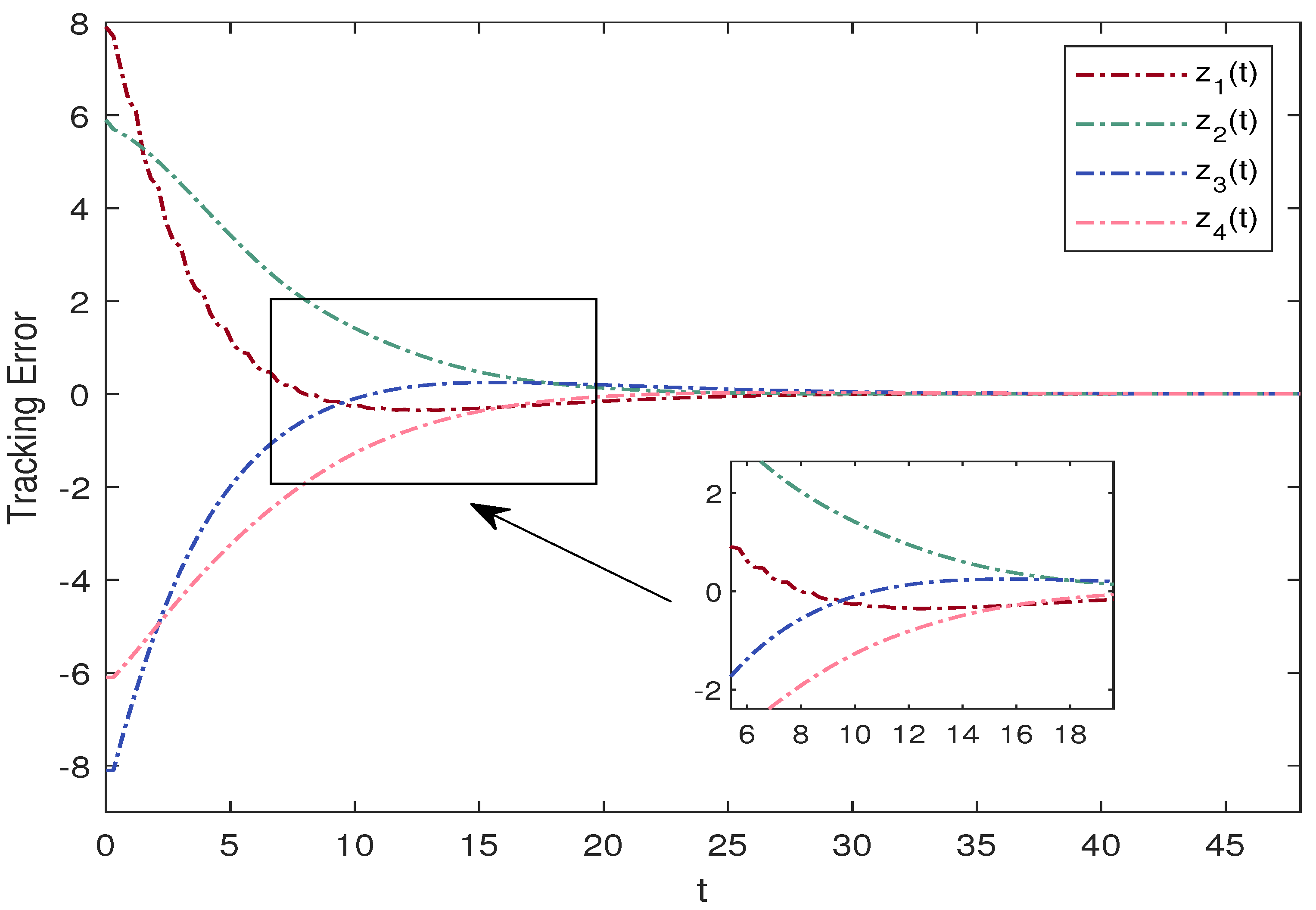
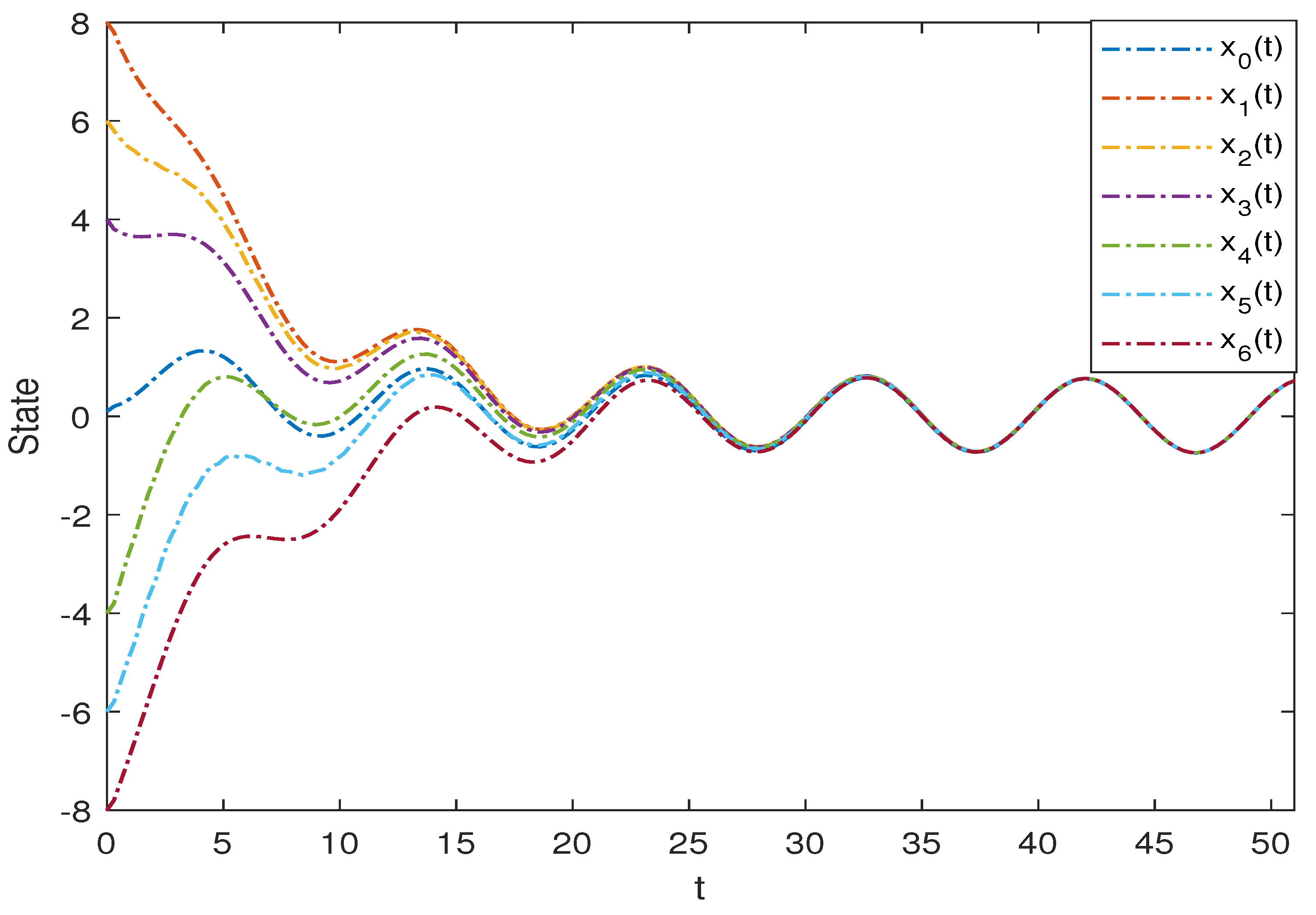
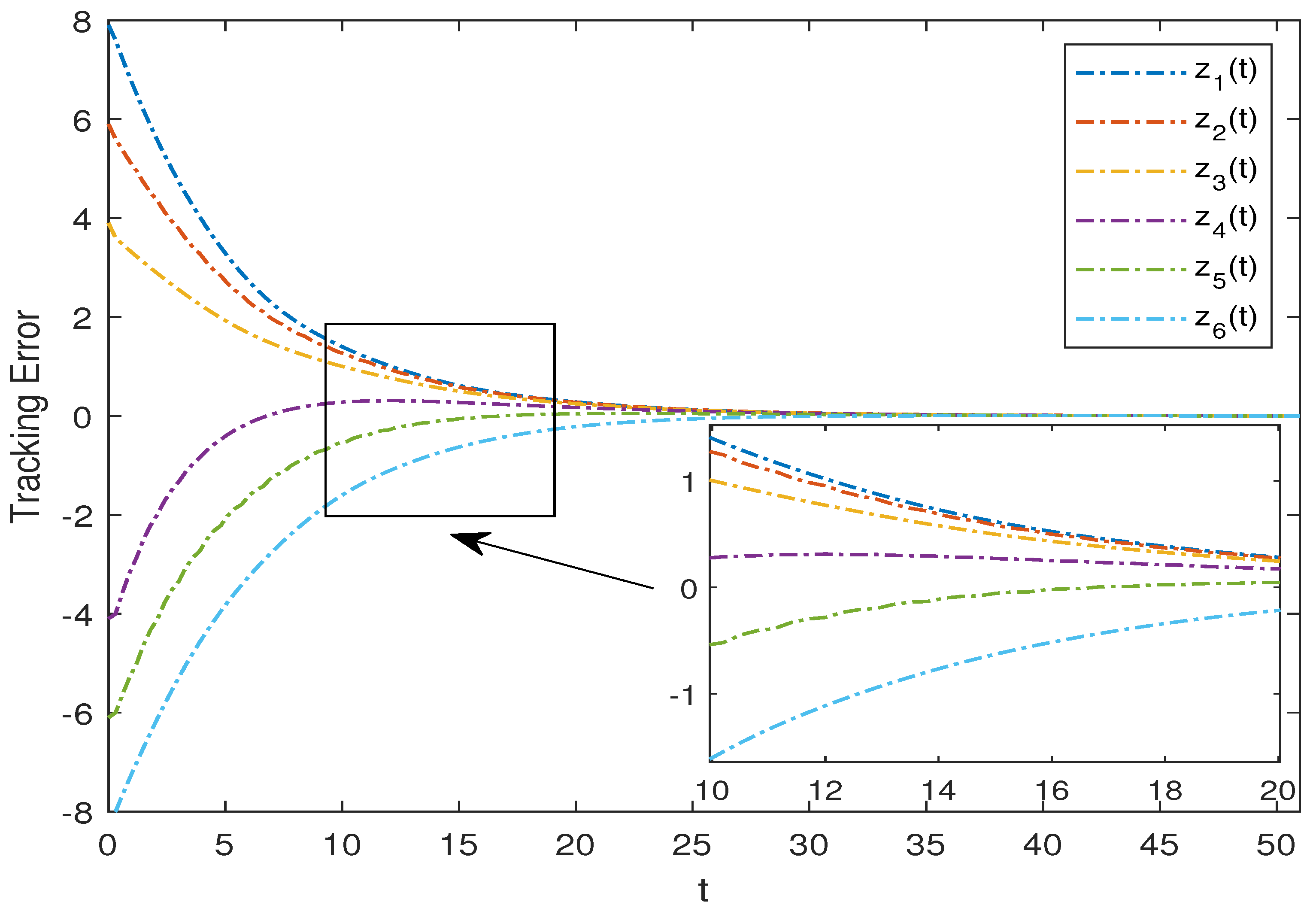
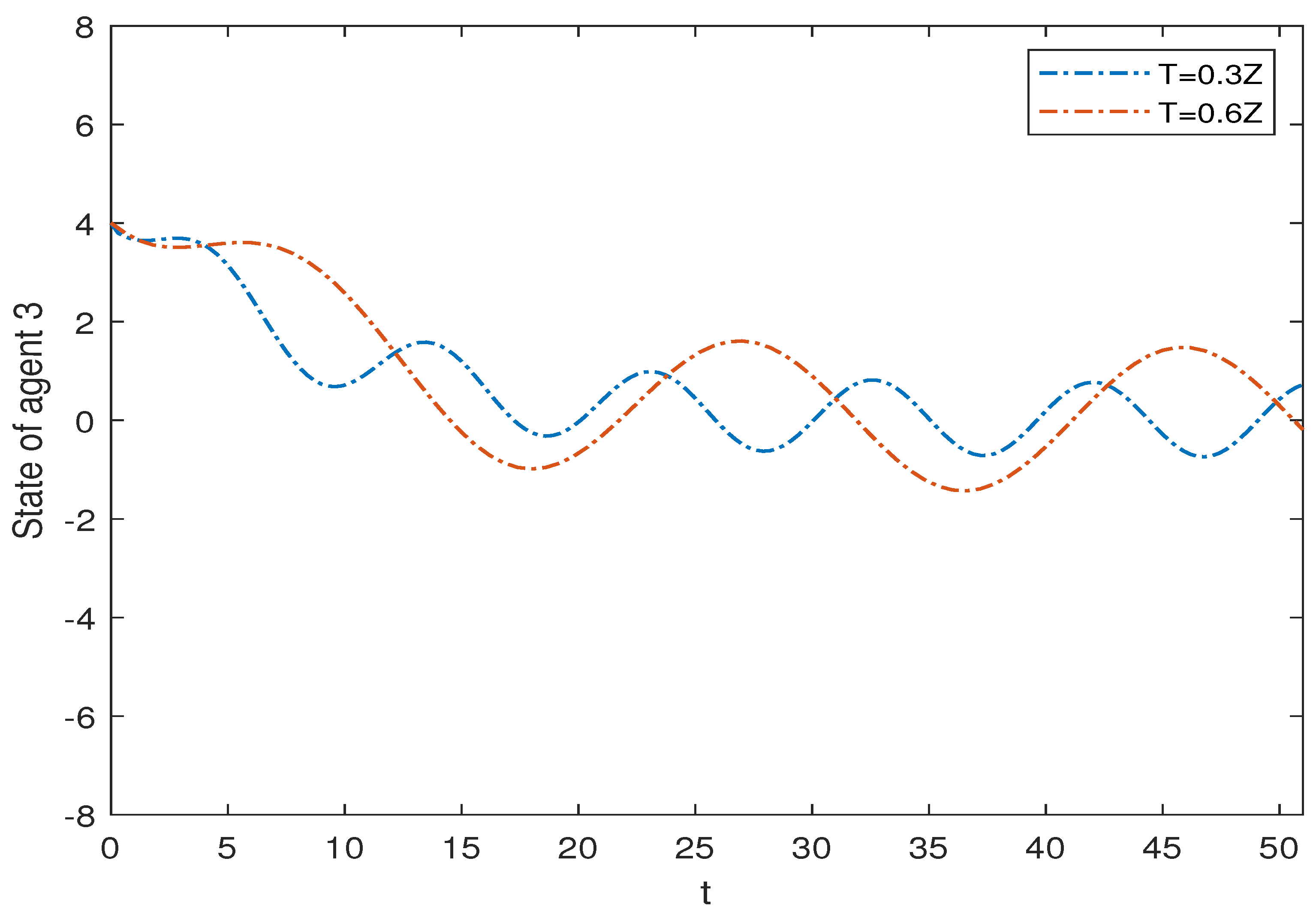
4.2. Numerical Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gu, K.; Kharitonov, V.L.; Chen, J. Stability of Time-Delay Systems; Birkhauser: Berlin, Germany, 2003. [Google Scholar]
- Niculescu, S.I.; Gu, K. Advances in Time-Delay Systems; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Hale, J.K. Theory of Functional Differential Equations; Springer: Berlin/Heidelberg, Germany, 1977. [Google Scholar]
- Taboun, M.S.; Brennan, R.W. An embedded multi-agent systems based industrial wireless sensor network. Sensors 2017, 17, 2112. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans. Ind. Inform. 2012, 9, 427–438. [Google Scholar] [CrossRef]
- Satunin, S.; Babkin, E. A multi-agent approach to intelligent transportation systems modeling with combinatorial auctions. Expert Syst. Appl. 2014, 41, 6622–6633. [Google Scholar] [CrossRef]
- Lizzio, F.F.; Capello, E.; Guglieri, G. A Review of consensus-based multi-agent UAV implementations. J. Intell. Robot. Syst. 2022, 106, 43. [Google Scholar] [CrossRef]
- Lin, P.; Jia, Y. Distributed rotating formation control of multi-agent systems. Syst. Control Lett. 2010, 59, 587–595. [Google Scholar] [CrossRef]
- Liu, K.; Ji, Z.; Xie, G.; Wang, L. Consensus for heterogeneous multi-agent systems under fixed and switching topologies. J. Franklin Inst. 2015, 352, 3670–3683. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, C.; Zhao, D.; Sun, B.; Li, Y. Event-triggered consensus control of continuous-time stochastic multi-agent systems. Automatica 2022, 137, 110022. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, W.; Ma, L. Finite-time consensus for the second-order leader-following nonlinear multi-agent system with event-triggered communication. J. Franklin Inst. 2022, 359, 6486–6502. [Google Scholar] [CrossRef]
- Liu, B.; Su, H.; Li, R.; Sun, D.; Hu, W. Switching controllability of discrete-time multi-agent systems with multiple leaders and time-delays. Appl. Math. Comput. 2014, 228, 571–588. [Google Scholar] [CrossRef]
- Yu, Z.; Zhao, Y.; Zhang, W. Study on consensus of the forth-order discrete-time multiagent system in directed networks. IEEE Access 2020, 8, 11658–11668. [Google Scholar] [CrossRef]
- Zhao, L.; Ji, Z.; Liu, Y.; Lin, C. Controllability of general linear discrete multi-agent systems with directed and weighted signed network. J. Syst. Sci. Complex. 2022, 35, 2107–2130. [Google Scholar] [CrossRef]
- Hilger, S. Ein Maβkettenkalkül mit Anwendung auf Zentrumsmannigfaltigkeiten. Ph.D. Thesis, Universät Würzburg, Würzburg, Germany, 1988. [Google Scholar]
- Taousser, F.; Defoort, M.; Djemai, M. Stability analysis of a class of uncertain switched systems on time scale using Lyapunov functions. Nonlinear Anal-Hybri. 2015, 16, 13–23. [Google Scholar] [CrossRef]
- Taousser, F.; Defoort, M.; Djemai, M. Consensus for linear multi-agent system with intermittent information transmissions using the time-scale theory. Int. J. Control. 2016, 89, 210–220. [Google Scholar] [CrossRef]
- Babenko, S.; Defoort, M.; Djemai, M.; Nicaise, S. On the consensus tracking investigation for multi-agent systems on time scale via matrix-valued Lyapunov functions. Automatica 2018, 97, 316–326. [Google Scholar] [CrossRef]
- Lu, X.; Li, H. An improved stability theorem for nonlinear systems on time scales with application to multi-agent systems. IEEE Trans. Circuits Syst. II 2020, 67, 3277–3281. [Google Scholar] [CrossRef]
- Bohner, M.; Peterson, A. Dynamic Equations on Time Scales: An Introduction with Applications; Springer Science & Business Media: New York, NY, USA, 2001. [Google Scholar]
- Bohner, M.; Peterson, A. Advances in Dynamic Equations on Time Scales; Birkhäuser: Boston, MA, USA, 2003. [Google Scholar]
- Adivar, M.; Raffoul, Y.N. Existence of periodic solutions in totally nonlinear delay dynamic equations. Electron J. Qual. Theory Differ. Equ. 2009, 1, 1–20. [Google Scholar] [CrossRef]
- Adivar, M.; Raffoul, Y.N. Stability, Periodicity and Boundedness in Functional Dynamical Systems on Time Scales; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Federson, M.; Grau, R.; Mesquita, J.G.; Toon, E. Lyapunov stability for measure differential equations and dynamic equations on time scales. J. Differ. Equ. 2019, 267, 4192–4223. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, X. On stability analysis of nonlinear time-delay systems on time scales. Syst. Control Lett. 2019, 131, 104498. [Google Scholar] [CrossRef]
- Ruan, X.; Feng, J.; Xu, C.; Wang, J. Observer-based dynamic event-triggered strategies for leader-following consensus of multi-agent systems with disturbances. IEEE Trans. Netw. Sci. Eng. 2020, 7, 3148–3158. [Google Scholar] [CrossRef]
- Wu, F.; Hu, S.; Liu, Y. Positive solution and its asymptotic behavior of stochastic functional Kolmogorov-type system. J. Math. Anal. Appl. 2010, 364, 104–118. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Shi, H. Exponential Stability of Dynamical Systems on Time Scales with Application to Multi-Agent Systems. Axioms 2024, 13, 100. https://doi.org/10.3390/axioms13020100
Liu M, Shi H. Exponential Stability of Dynamical Systems on Time Scales with Application to Multi-Agent Systems. Axioms. 2024; 13(2):100. https://doi.org/10.3390/axioms13020100
Chicago/Turabian StyleLiu, Mingshuo, and Huizhe Shi. 2024. "Exponential Stability of Dynamical Systems on Time Scales with Application to Multi-Agent Systems" Axioms 13, no. 2: 100. https://doi.org/10.3390/axioms13020100
APA StyleLiu, M., & Shi, H. (2024). Exponential Stability of Dynamical Systems on Time Scales with Application to Multi-Agent Systems. Axioms, 13(2), 100. https://doi.org/10.3390/axioms13020100