Abstract
In this article, we examine the relationship between Darboux frames along parameter curves and the Darboux frame of the base curve of the ruled surface. We derive the equations of the quaternionic shape operators, which can rotate tangent vectors around the normal vector, and find the corresponding rotation matrices. Using these operators, we examine the Gauss curvature and mean curvature of the ruled surface. We explore how these properties are found by the use of Frenet vectors instead of generator vectors. We provide illustrative examples to better demonstrate the concepts and results discussed.
MSC:
11R52; 53A05
1. Introduction
The universal cover of the special orthogonal group in three dimensions SO(3) is a Lie group known as Spin(3). The group Spin(3) is isomorphic to the special unitary group SU(2). Additionally, Spin(3) is diffeomorphic to the three-dimensional unit sphere , and it can be understood as the group of versors, which are quaternions with an absolute value of 1. In computer graphics, the connection between quaternions and rotations is commonly used. This connection is explained in detail on the topic of quaternions and spatial rotations. The map from onto SO(3) identifies antipodal points of , and it is a surjective homomorphism of Lie groups. Topologically, this map is a two-to-one covering map. The group SU(2) is isomorphic to the quaternions of unit norm via a map determined by
restricted to where SU(2), and where denote the set of real numbers. The Pauli matrices are three complex matrices that satisfy three important properties: Hermiticity, involution, and unitarity. These matrices produce an algebra that is isomorphic to the Clifford algebra [1]. In the field of transformations, certain equations relying on the use of Pauli matrices have been discovered. The application of Pauli matrices has been explored in various studies across different fields of research, including condensed matter physics, quantum computing, and soliton surfaces. The authors introduce and analyze a specific class of exact solutions to the equations related to the localized-induction approximation. These solutions are characterized by three parameters and are considered one-soliton excitations, also known as Bäcklund transforms, of circular vortex motion [2]. The formulation of the Darboux–Bäcklund transformation is achieved using Clifford numbers, resulting in a simpler process for constructing explicit solutions. This transformation is particularly useful in the field of differential equations and provides a way to transform a known solution into a new one [3]. Sym develops the concept of a soliton surface, which provides a geometric interpretation of the equivalence relation [4]. Schief show that the natural geodesic coordinate systems on Razzaboni surfaces and their mates are related by a reciprocal transformation. The geodesic coordinate system on the Razzaboni transform generated by a Bäcklund transformation is given explicitly in terms of Razzaboni’s pseudopotential obeying a compatible Frobenius system [5].
The (unital associative) algebra generated by is effectively isomorphic to that of quaternions. The study conducted by Rogers et al. focuses on the Bäcklund and Darboux transformations, their geometry, and modern applications in soliton theory [6]. Quaternions represent three-dimensional rotations about an arbitrary axis and offer a solution to employ quaternion algebra in kinematics equations. As a result, several new application areas emerged such as programming, robotics, animation and navigation systems. To describe the rotations of objects, a four-coordinate system called quaternions is commonly used. The most appropriate quaternions for animation are those located on the unit sphere. However, little attention has been given to the problem of constructing curves on spheres. Shoemake proposes a solution by introducing a novel type of spline curve designed to be created on a sphere, and capable of smoothly interpolating arbitrary sequences of rotations [7]. Xu et al. propose the quaternion calibration algorithm to calibrate large misalignment angles between Strapdown Inertial Navigation System (SINS) and Doppler Velocity Log (DVL) in SINS/DVL integrated navigation system [8]. In addition to these areas, quaternions are also important for the theory of surfaces. Bobenko utilizes analytic methods to construct and study surfaces. To facilitate this, the author finds it more convenient to use matrices instead of matrices. As a result, it is calculated certain equations for the moving frame in terms of quaternions, allowing for better control over the spin structure of the immersion [9]. Babaarslan and Yaylı examine constant slope surfaces with quaternions [10]. The quaternion rational surfaces are introduced by Wang and Goldman. Analyzing these surfaces, they investigate how to use syzygies [11]. Şenyurt and Çalışkan express ruled surface as quaternionic and compute integral invariants of ruled surface [12]. In the differential geometry of surfaces, interesting studies have been made on the orthonormal frames. In one of these studies, Cui and Dai investigate the kinematics of the spin-rolling motion of rigid objects [13]. Li et al. introduce partner-ruled surfaces according to the Flc frame. Then, the conditions of each couple of two partners ruled surfaces to be simultaneously developable and minimal are investigated. Moreover, some special curves of the partner ruled surfaces are characterized [14]. Şenyurt and Çalışkan examine ruled surfaces as dual quaternions and explain the characterization of this surface [15]. Aslan and Yaylı define the quaternionic shape operator expressed in the surface. They aim to find a way to calculate the invariants of the surface using Darboux frames and quaternions [16]. Ruled surfaces are one of the simplest objects in geometric modeling. A practical application of ruled surfaces is that they are used in civil engineering. In addition to civil engineering, ruled surfaces are also important for robot kinematics. Ryuh suggests the idea that ruled surfaces play an important role in robot end effectors [17]. In another study, parallel q-equidistant ruled surfaces are defined. When the surfaces are considered to be closed, then the integral invariants are given [18]. López investigate surfaces whose mean curvature H satisfies the equation . These surfaces generalize self-shrinkers and self-expanders of the mean curvature flow. He categorizes the ruled and the translation surfaces [19]. Some authors give crucial results about the curves and surfaces in different spaces [12,15,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37]. We can find more motivations of our work from some articles (see [38,39,40,41,42,43,44,45,46,47,48,49,50]).
In Section 2, we provide some necessary background information about the problem of the paper that was mentioned in the introduction. In Section 3, we examine the relationship between Darboux frames along parameter curves and the Darboux frame of the base curve of the ruled surface. We derive the equations of the quaternionic shape operators and we investigate the rotation matrix, the Gauss curvature, and the mean curvature of the surface with these operators. In Section 4, we explore the ruled surfaces that can be drawn using Frenet vectors and we derive the equations of the quaternionic shape operators and exemplify the findings. In Section 5, we give a conclusion for our findings and discuss potential directions for future research.
2. Preliminaries
Let be a unit-speed curve, hence for each s in I. We call the unit tangent vector field of , since it points in the direction of the curve. The derivative of with respect to arc length, denoted , measures the way the curve is turning in . Differentiation of yields , which means that is orthogonal to at each point. We call the curvature vector field of and denote , which is called the curvature of the curve. Thus and the larger is, the sharper the turning of . If we assume that for all , we can define the principal normal vector field , which tells us the direction in which the curve is turning at each point. The binormal vector field is then defined as the vector field .
(Frenet formulas:) If is a unit-speed curve with first curvature and second curvature (torsion) , then [51]
A quaternion can be expressed as , where d is the real part and is the pure part. We call quaternions with zero real parts () pure quaternions. A pure quaternion can also be represented as equivalently, it satisfies [52,53].
The Hamiltonian quaternions H are the unitary -algebra generated by the symbols with the relations
where it is implied that the product of any two terms in the above expressions is the quaternion product. The general form of the quaternion product is as follows:
Definition 1
([52,53]). Let and be two quaternions. where , and are the imaginary units of the quaternion algebra. The quaternion multiplication of and , denoted as , is defined as follows:
The quaternion multiplication of two pure quaternions is
where is the inner product and × is the cross product.
The conjugate of a quaternion is denoted as . The norm of the quaternion is given by . It follows that .
Substituting , where and is a unit three-vector lying on the two-sphere where denote the 3-dimensional Euclidean space. The matrix becomes the standard matrix for a rotation by in the plane perpendicular to The quadratic form certifies that the two distinct unit quaternions q and in correspond to the same rotation. Let p be a pure quaternion. Then is p rotated about the axis Moreover, the rotation matrix has the following explicit form [52]:
Definition 2
([51]). Let be an open set. M is a regular surface in , if the mapping is one-to-one, regular and homeomorphism.
Let the surface M be given by the parameterization for . If we keep the first parameter u constant, then is a curve on the surface. Similarly, if t is constant, then traces a curve on the surface. These curves are called parameter curves [54].
If p is a point of M, so for each tangent vector X to M at p,
Herein Z is the unit normal vector field. is defined as the shape operator of M at p. The shape operator is the symmetric linear map [51,54].
Definition 3
([51]). Let M be a regular surface in . The Gaussian curvature of M at a point is defined as the determinant of the shape operator S of M at p, i.e., . Similarly, the mean curvature of M at a point is defined as the trace of the shape operator S of M at p, i.e., .
Lemma 1
([51]). Let and be the tangent vectors of and , respectively. If and are linearly independent tangent vectors at a point p of , then the Gauss and mean curvatures are found with the equations
Let M be an oriented regular surface with a unit normal Z, and let be a curve with parameter s on M. Denote by the vector , and write . The orthonormal frame is called Darboux frame. The equations of motion of the Darboux frame can be written as
where , and are the geodesic curvature, the normal curvature, and the geodesic torsion, respectively [51,54].
Definition 4
([51]). A regular curve α in M is called a principal curve if its velocity vector α always points in a principal direction, which means that the geodesic torsion along the curve is zero.
Theorem 1
([16]). Let M be a surface with parameters u and t, and be a parameter curve in M. By using the quaternion operator , the shape operator can be given as
The quaternion Q will be called a quaternionic shape operator.
Theorem 2
([16]). Let M be a surface in with a unit normal vector field Z and be a unit quaternion. Let be the quaternionic shape operator given by
The quaternionic shape operator rotates the tangent vector in the tangent plane of the surface around the normal vector of the surface.
Theorem 3
([16]). Let M be a surface with parameters u and v and and be the parameter curves on M. The unit tangent vectors of these curves are and , respectively. By using the quaternionic shape operators, the Gauss curvature K and the mean curvature H can be written by
Corollary 1
([16]). If the curves in the surface are the principal curve, the quaternionic shape operator is given by
where I is the unit matrix.
A surface is said to be ruled if it is generated by moving a straight line continuously in . Thus a ruled surface has a parametrization in the form
where we call the base curve of the ruled surface, the generator unit vector of ruled surface [54]. Let the unit vector be the normal vector of the surface and the Darboux frame be at the point of of the ruled surface. The derivative of and can be written by [55]
where and are real-valued functions.
3. Quaternion Shape Operator and Rotation Matrix on Ruled Surface
A ruled surface has special curves, namely the parametric curves and , and the base curve . There are Darboux frames and belonging to parametric curves and of the ruled surface at p. There is a Darboux frame belonging to the base curve of the ruled surface at In this section, we investigate the relationship between Darboux frames along parameter curves and the Darboux frame of the base curve of the ruled surface. We derive the equations of the quaternionic shape operators, which rotate tangent vectors around the normal vector. We also find the corresponding rotation matrices. By using the quaternionic shape operators, we examine the Gauss curvature and the mean curvature of the surface.
Theorem 4.
Let be a ruled surface and let and s parameter and v parameter curves on the ruled surface, respectively. Then the following relations hold between the Darboux frames of φ:
and
Proof.
Theorem 5.
Let φ be a ruled surface and let and parameter curves on the ruled surface, respectively. The quaternionic shape operators and are calculated by
Proof.
From the Equations (1) and (3), the quaternionic shape operator for the vector is quaternionically obtained by
The normal curvature and the geodesic torsion can be calculated as:
Substituting these values into the expression for the quaternionic shape operator, we obtain:
Similarly, we can find the quaternionic shape operator using the same method. □
Using this operator, we can give the following theorem regarding the rotation of the tangent vector .
Theorem 6.
The quaternionic shape operator rotates the tangent vector in the tangent plane of the surface around the normal vector of the ruled surface. The yielding rotation matrix is given by
where .
Proof.
We begin by noting that the equation holds, where is the normal curvature and is the geodesic torsion. Then, we obtain
Next, we calculate the expressions for and and substitute them in the above equation, we obtain
Using Equation (2), we can conclude that the quaternionic shape operator rotates the tangent vector in the tangent plane of the surface around the normal vector of the surface. This completes the proof. □
We can give the following result for the tangent vector .
Corollary 2.
The quaternionic shape operator rotates the tangent vector in the tangent plane of the surface around the normal vector of the ruled surface. The yielding rotation matrix is given by
where is an orthogonal matrix.
Theorem 7.
Let φ be a ruled surface. The Gauss curvature K and the mean curvature H of the ruled surface are obtained by
Proof.
The Gauss curvature of the ruled surface is defined as quaternionic as follows:
Using (10) and (11), it can be found
If we calculate the norm of the above equation, we have
From (9), we know that . Then we obtain
When the required calculations are completed, the resulting mean curvature is
□
The picture of the ruled surface and quaternion shape operators see Figure 1.
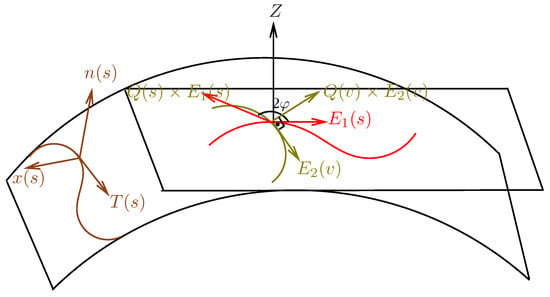
Figure 1.
Ruled surface and quaternion shape operators.
4. Quaternion Shape Operator and Rotation Matrices on Special Ruled Surfaces
In this section, we explore the ruled surfaces that can be drawn using Frenet vectors and we derive the equations of the quaternionic shape operators. Through quaternionic shape operators, we uncover a variety of interesting results, including rotation matrices, Gauss curvatures, and mean curvatures.
4.1. The Ruled Surface Drawn by Tangent Vector
Theorem 8.
Let be a ruled surface and α be a base curve of the surface. The expressions of the Darboux frames constructed on the and parameter curves on the ruled surface, according to the Frenet vectors, are
and
Proof.
For the ruled surface , the partial derivative is taken according to s and v, it is found
Taking into account the inner product, we have
Using the Gram–Schmidt process, the vectors of orthonormal base for and are
The unit normal vector of the is given as
and depending Frenet frame at point can be obtained
□
Theorem 9.
Let be a ruled surface. The quaternionic shape operators and are obtained by
Proof.
By considering the Equation (3), The quaternionic shape operators and are expressed by
□
Corollary 3.
Theorem 10.
The ruled surface is flat. The mean curvature H of this surface is obtained by
Proof.
It is very similar to the proof of Theorem 7, therefore we omit it. □
4.2. The Ruled Surface Drawn by Principal Normal Vector
The relation between frames according to surface can be obtained as it is similar to Theorem 8.
and
Theorem 11.
Let be a ruled surface. The quaternionic shape operators and are obtained by
Proof.
The theorem is similar to Theorem 9, therefore we omit its proof. □
Corollary 4.
The cosine and sine of the angle of between and are explicitly shown as
The rotation matrix can be obtained as
where .
Theorem 12.
Let be ruled surface. The Gauss curvature K and the mean curvature H of this surface are obtained by
Proof.
It is very similar to the proof of Theorem 7. Thus, we omit it. □
4.3. The Ruled Surface Drawn by Binormal Vector
The relation between frames according to surface can be obtained as it is similar to Theorem 8.
and
Theorem 13.
Let be a ruled surface. The quaternionic shape operators of and are obtained by
Proof.
The theorem is similar to Theorem 9, therefore we omit its proof. □
Corollary 5.
The cosine and sine of the angle of between and are explicitly shown as
The rotation matrix is given by
where .
Theorem 14.
Let be a ruled surface. The Gauss curvature K and the mean curvature H of this surface are obtained by
Proof.
It is very similar to the proof of Theorem 7. Therefore, we omit it. □
Example 1.
The straight circular cylinder of radius 1 about the z-axis has the following parametric representation:
A ruled surface is a surface swept out by a straight line as it moves through space. For example, a cylinder is formed by moving a straight line around a curve in a plane, keeping it perpendicular to the plane at all times. Hence, the parametric equation of the cylinder is
where base curve is and generator vector is It is shown that curvature and torsion of the base curve are 1 and 0, respectively. By taking into account (6), we can obtain
In similar way, we find that Considering (4) and (5), we have and .
Example 2.
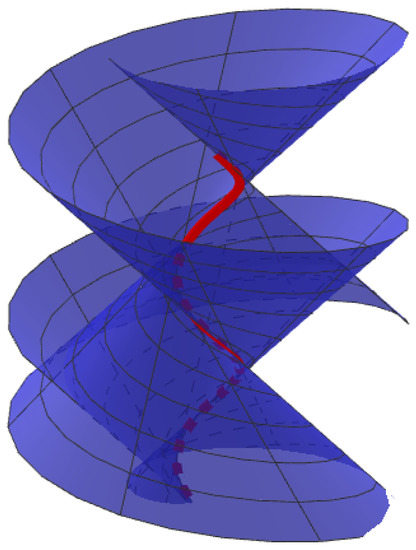
Let be a circular helix. A ruled surface can be constructed as follows:
where is binormal vector of circular helix. It is easy to determined
Concentrating on the investigation of the quaternionic shape operator in the Equation (17), it is solved via the rotation method
Then doing the required simplifications, we find the quaternionic shape operator as
Considering the appropriate scaling of s and should be and ; respectively, the quaternionic shape operator is obtained as The ruled surface can see Figure 2.
Figure 2.
The ruled surface (blue) with the base curve (red).
The quaternionic shape operator rotates the tangent vector in the tangent plane of the surface around the normal vector of the surface. The yielding rotation matrix is given by
5. Conclusions and Discussion
Combining the mathematical tools of quaternions with the theory of ruled surfaces has the potential to yield new insights and applications. In this article, we attempted to unify certain aspects of two important subjects. Furthermore, we explored the relationship between Darboux frames along parameter curves and the Darboux frame of the base curve of a ruled surface. Our investigation has led us to derive the equations for quaternionic shape operators, which can rotate tangent vectors around the normal vector, and find the corresponding rotation matrices. Using these operators, we examined the Gauss curvature and mean curvature of the ruled surface and have explored how these properties differ when Frenet vectors are used instead of generator vectors. Our study uncovers several interesting findings about the geometry of ruled surfaces and the interplay between their various properties. In particular, we show the importance of Darboux frames in understanding these surfaces and how they can be used to derive useful equations. Furthermore, we provide a range of illustrative examples to help clarify the concepts and results presented throughout the article. Our investigation also opens up new avenues for future research in this field, including the study of ruled surfaces in different spaces such as Lorentz and dual space. In the future work, we are going to study some applications of ruled surfaces combine with singularity theory, submanifold theory, etc., in [56,57,58,59,60,61,62,63,64,65,66], to obtain more new results.
Author Contributions
Conceptualization, Y.L. and A.Ç.; methodology, A.Ç.; software, Y.L., A.Ç.; validation, Y.L.; writing—original draft preparation, A.Ç.; writing—review and editing, Y.L., A.Ç.; visualization, A.Ç.; funding acquisition, Y.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (grant no. 12101168) and the Zhejiang Provincial Natural Science Foundation of China (grant no. LQ22A010014).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to express their sincere thanks to the editor and the anonymous reviewers for their helpful comments and suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Burstall, F.E.; Ferus, D.; Leschke, K.; Pedit, F.; Pinkall, U. Conformal Geometry of Surfaces in S4 and Quaternions, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 5–9. [Google Scholar]
- Cieslinski, J.; Gragert, P.K.H.; Sym, A. Exact solution to localized-induction-approximation equation modeling smoke ring motion. Phys. Rev. Lett. 1986, 57, 1507–1510. [Google Scholar] [CrossRef] [PubMed]
- Cieslinski, J.L. Geometry of submanifolds derived from Spin-valued spectral problems. Theor. Math. Phys. 2003, 137, 1396–1405. [Google Scholar] [CrossRef]
- Sym, A. Soliton Surfaces and their Applications in Geometrical Aspects of the Einstein Equations and Integrable Systems. Lect. Notes Phys. 1985, 239, 154–231. [Google Scholar]
- Schief, W.K. On the integrability of Bertrand curves and Razzaboni surfaces. J. Geom. Phys. 2003, 45, 130–150. [Google Scholar] [CrossRef]
- Rogers, C.; Rogers, C.; Schief, W.K. Bäcklund and Darboux Transformations: Geometry and Modern Applications in Soliton Theory; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Shoemake, K. Animating Rotation with Quaternion Curves. Siggraph Comput. Graph. 1985, 19, 245–254. [Google Scholar] [CrossRef]
- Xu, B.; Wang, L.; Li, S.; Zhang, J. A novel calibration method of SINS/DVL integration navigation system based on quaternion. IEEE Sens. J. 2020, 20, 9567–9580. [Google Scholar] [CrossRef]
- Bobenko, A.I. Surfaces in terms of 2 by 2 matrices. Old and new integrable cases. In Harmonic Maps and Integrable Systems; Fordy, A., Wood, J., Eds.; Vieweg: Wiesbaden, Germany, 1994; pp. 81–127. [Google Scholar]
- Babaarslan, M.; Yaylı, Y. A new approach to constant slope surfaces with quaternions. ISRN Geom. 2012, 2012, 126359. [Google Scholar] [CrossRef]
- Wang, X.; Goldman, R.İ. Quaternion rational surfaces: Rational surfaces generated from the quaternion product of two rational space curves. Adv. Appl. Graph. Model. 2015, 81, 18–32. [Google Scholar] [CrossRef]
- Şenyurt, S.; Çalışkan, A. The quaternionic expression of ruled surfaces. Filomat 2018, 32, 5753–5766. [Google Scholar] [CrossRef]
- Cui, L.; Dai, J.S. A Darboux-Frame-Based formulation of spin-rolling motion of rigid objects with point contact. IEEE Trans. Robot. 2010, 26, 383–388. [Google Scholar] [CrossRef]
- Li, Y.; Eren, K.; Ayvacı, K.H.; Ersoy, S. Simultaneous characterizations of partner ruled surfaces using Flc frame. AIMS Math. 2022, 7, 20213–20229. [Google Scholar] [CrossRef]
- Çalışkan, A.; Şenyurt, S. The Dual Spatial Quaternionic Expression of Ruled Surfaces. Therm. Sci. 2019, 23, 403–411. [Google Scholar] [CrossRef]
- Aslan, S.; Yaylı, Y. Quaternionic shape operator. Adv. Appl. Clifford Algebr. 2017, 27, 2921–2931. [Google Scholar] [CrossRef]
- Ryuh, B.S. Robot Trajectory Planning Using the Curvature Theory of Ruled Surfaces. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 1989. [Google Scholar]
- Li, Y.; Şenyurt, S.; Özduran, A.; Canlı, D. The Characterizations of Parallel q-Equidistant Ruled Surfaces. Symmetry 2022, 14, 1879. [Google Scholar] [CrossRef]
- López, R. Ruled surfaces of generalized self-similar solutions of the mean curvature flow. Mediterr. J. Math. 2021, 18, 197. [Google Scholar] [CrossRef]
- Saad, M.K.; Abdel-Baky, R.A. On ruled surfaces according to quasi-frame in Euclidean 3-space. Aust. J. Math. Anal. Appl. 2020, 17, 11–16. [Google Scholar]
- Gök, İ. Quaternionic approach of canal surfaces constructed by some new ideas. Adv. Appl. Clifford Algebr. 2017, 27, 1175–1190. [Google Scholar] [CrossRef]
- Çalışkan, A. The Quaternionic Ruled Surfaces in Terms of Alternative Frame. Palest. J. Math. 2022, 11, 406–412. [Google Scholar]
- Ali, A.T. Non-lightlike constant angle ruled surfaces in Minkowski 3-space. J. Geom. Phys. 2020, 157, 103833. [Google Scholar] [CrossRef]
- Ali, A.T. A constant angle ruled surfaces. Int. J. Geom. 2018, 7, 69–80. [Google Scholar]
- Ali, A.T. Non-lightlike ruled surfaces with constant curvatures in Minkowski 3-space. Int. J. Geom. Methods Mod. Phys. 2018, 15, 1850068. [Google Scholar] [CrossRef]
- Ali, A.T.; Hamdoon, F.M. Surfaces foliated by ellipses with constant Gaussian curvature in Euclidean 3-space. Korean J. Math. 2017, 25, 537–554. [Google Scholar]
- Ali, A.T.; Abdel Aziz, H.S.; Sorour, A.H. On some geometric properties of quadric surfaces in Euclidean space. Honam Math. J. 2016, 38, 593–611. [Google Scholar] [CrossRef]
- Ali, A.T.; Abdel Aziz, H.S.; Sorour, A.H. On curvatures and points of the translation surfaces in Euclidean 3-space. J. Egypt. Math. Soc. 2015, 23, 167–172. [Google Scholar] [CrossRef]
- Gür, S.; Şenyurt, S.; Grilli, L. The Invariants of Dual Parallel Equidistant Ruled Surfaces. Symmetry 2023, 15, 206. [Google Scholar]
- Gür, S. Geometric properties of timelike surfaces in Lorentz-Minkowski 3-space. Filomat 2023, 37, 5735–5749. [Google Scholar]
- Gür, S.; Şenyurt, S.; Grilli, L. The Dual Expression of Parallel Equidistant Ruled Surfaces in Euclidean 3-Space. Symmetry 2022, 14, 1062. [Google Scholar]
- Çalışkan, A.; Şenyurt, S. Curves and ruled surfaces according to alternative frame in dual space. Commun. Fac. Sci. Univ. 2020, 69, 684–698. [Google Scholar] [CrossRef]
- Şenyurt, S.; Gür, S. Spacelike surface geometry. Int. J. Geom. Methods Mod. Phys. 2017, 14, 1750118. [Google Scholar] [CrossRef]
- As, E.; Şenyurt, S. Some Characteristic Properties of Parallel-Equidistant Ruled Surfaces. Math. Probl. Eng. 2013, 2013, 587289. [Google Scholar] [CrossRef]
- Özcan, B.; Şenyurt, S. On Some Characterizations of Ruled Surface of a Closed Timelike Curve in Dual Lorentzian Space. Adv. Appl. Clifford Al. 2012, 22, 939–953. [Google Scholar]
- Izumiya, S.; Saji, K.; Takeuchi, N. Circular surfaces. Adv. Geom. 2007, 7, 295–313. [Google Scholar] [CrossRef]
- Izumiya, S.; Saji, K.; Takeuchi, N. Great circular surfaces in the three-sphere. Differ. Geom. Its Appl. 2011, 29, 409–425. [Google Scholar] [CrossRef]
- Izumiya, S. Special curves and ruled surfaces. Cotributions Algebra Geom. 2003, 44, 203–212. [Google Scholar]
- Gorjanc, S.; Jurkin, E. Circular surfaces CS(α, p). Filomat 2015, 29, 725–737. [Google Scholar] [CrossRef]
- Abdel-Baky, R.A.; Unluturk, Y. On the curvatures of spacelike circular surfaces. Kuwait J. Sci. 2016, 43, 50–58. [Google Scholar]
- Abdel-Baky, R.; Alluhaibi, N.; Ali, A.; Mofarreh, F. A study on timelike circular surfaces in Minkowski 3-space. Int. J. Geom. Methods Mod. Phys. 2020, 17, 2050074. [Google Scholar] [CrossRef]
- Tuncer, O.; Canakcı, Z.; Gok, I.; Yaylı, Y. Circular surfaces with split quaternionic representations in Minkowski 3-space. Adv. Appl. Clifford Algebr. 2018, 28, 63. [Google Scholar] [CrossRef]
- İlarslan, K.; Nešović, E. Some characterizations of osculating curves in the Euclidean spaces. Demonstr. Math. 2008, 41, 931–940. [Google Scholar]
- Ravani, B.; Ku, T.S. Bertrand offsets of ruled and developable surfaces. Comput. Aided Des. 1991, 23, 145–152. [Google Scholar] [CrossRef]
- Küçük, A.; Gürsoy, O. On the invariants of Bertrand trajectory surface offsets. Appl. Math. Comput. 2004, 151, 763–773. [Google Scholar] [CrossRef]
- Aldossary, M.T.; Abdel-Baky, R.A. On the Bertrand offsets for ruled and developable surfaces. Boll. Unione Mat. Ital. 2015, 8, 53–64. [Google Scholar] [CrossRef]
- Kasap, E.; Kuruoglu, N. Integral invariants of the pairs of the Bertrand ruled surface. Bull. Pure Appl. Sci. Sect. E Math. 2002, 21, 37–44. [Google Scholar]
- Kasap, E.; Kuruoglu, N. The Bertrand offsets of ruled surfaces in . Acta Math. Vietnam 2006, 31, 39–48. [Google Scholar]
- Kasap, E.; Yuce, S.; Kuruoglu, N. The involute-evolute offsets of ruled surfaces. Iran. J. Sci. Tech. Trans. A 2009, 33, 195–201. [Google Scholar]
- Orbay, K.; Kasap, E.; Aydemir, I. Mannheim offsets of ruled surfaces. Math. Probl. Eng. 2009, 2009, 160917. [Google Scholar] [CrossRef]
- O’Neill, B. Elementary Differential Geometry; Elsevier: Los Angles, CA, USA, 2006. [Google Scholar]
- Hanson, J.A. Visualing Quaternions; Elsevier: North York, ON, Canada, 2006. [Google Scholar]
- Kuipers, J.B. Quaternions and Rotation Sequences: A Primer with Applications to Orbits, Aerospace, and Virtual Reality; Princeton University Press: Princeton, NJ, USA, 1999. [Google Scholar]
- Do Carmo, M.P. Differential Geometry of Curves and Surfaces; Prentice-Hall: Hoboken, NJ, USA, 1976; ISBN 0-13-212589-7. [Google Scholar]
- Hacısalihoğlu, H.H. Differential Geometry; İnönü University: Malatya, Turkey, 1983. [Google Scholar]
- Li, Y.; Tuncer, O.O. On (contra)pedals and (anti)orthotomics of frontals in de Sitter 2-space. Math. Meth. Appl. Sci. 2023, 46, 11157–11171. [Google Scholar] [CrossRef]
- Li, Y.; Abolarinwa, A.; Alkhaldi, A.; Ali, A. Some Inequalities of Hardy Type Related to Witten-Laplace Operator on Smooth Metric Measure Spaces. Mathematics 2022, 10, 4580. [Google Scholar] [CrossRef]
- Li, Y.; Aldossary, M.T.; Abdel-Baky, R.A. Spacelike Circular Surfaces in Minkowski 3-Space. Symmetry 2023, 15, 173. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Z.; Nazra, S.H.; Abdel-Baky, R.A. Singularities for Timelike Developable Surfaces in Minkowski 3-Space. Symmetry 2023, 15, 277. [Google Scholar] [CrossRef]
- Li, Y.; Alkhaldi, A.; Ali, A.; Abdel-Baky, R.A.; Saad, M.K. Investigation of ruled surfaces and their singularities according to Blaschke frame in Euclidean 3-space. AIMS Math. 2023, 8, 13875–13888. [Google Scholar] [CrossRef]
- Li, Y.; Eren, K.; Ayvacı, K.H.; Ersoy, S. The developable surfaces with pointwise 1-type Gauss map of Frenet type framed base curves in Euclidean 3-space. AIMS Math. 2023, 8, 2226–2239. [Google Scholar] [CrossRef]
- Li, Y.; Ganguly, D. Kenmotsu Metric as Conformal η-Ricci Soliton. Mediterr. J. Math. 2023, 20, 193. [Google Scholar] [CrossRef]
- Li, Y.; Srivastava, S.K.; Mofarreh, F.; Kumar, A.; Ali, A. Ricci Soliton of CR-Warped Product Manifolds and Their Classifications. Symmetry 2023, 15, 976. [Google Scholar] [CrossRef]
- Li, Y.; Laurian-Ioan, P.; Alqahtani, L.; Alkhaldi, A.; Ali, A. Zermelo’s navigation problem for some special surfaces of rotation. AIMS Math. 2023, 8, 16278–16290. [Google Scholar] [CrossRef]
- Li, Y.; Abdel-Salam, A.A.; Saad, M.K. Primitivoids of curves in Minkowski plane. AIMS Math. 2023, 8, 2386–2406. [Google Scholar] [CrossRef]
- Li, Y.; Erdoğdu, M.; Yavuz, A. Differential Geometric Approach of Betchow-Da Rios Soliton Equation. Hacet. J. Math. Stat. 2023, 52, 114–125. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).