Abstract
The authors have recently investigated a type of Hyers–Ulam stability of one-dimensional time-independent Schrödinger equation with a symmetric parabolic potential wall. In this paper, we investigate a type of Hyers–Ulam stability of the Schrödinger equation with a near-hyperbolic potential.
1. Introduction
About 80 years ago, Ulam [1] proposed the following general stability problem concerning functional equations: Assume that we changed the mathematical equation to an inequality in some way. In this case, is there a solution to the equation near each solution to the inequality?
In 1941, Hyers [2] partially solved Ulam’s question for the approximately additive functions, assuming that and are Banach spaces. Indeed, he proved that each solution to the inequality (for all x and y) can be approximated by an exact solution, i.e., by an additive function. In that case, the Cauchy additive equation, , is said to have (or satisfy) the Hyers–Ulam stability.
Meanwhile, Rassias [3], trying not to strongly limit the Cauchy difference, attempted to weaken the condition for the Cauchy difference as follows:
where p is a fixed real number with , and he proved the theorem of Hyers. That is, he proved the Hyers–Ulam-Rassias stability (or generalized Hyers–Ulam stability) of the Cauchy additive functional equation. Since then, Găvruţa [4] has published a paper that further expands the theorem of Rassias, both of which have been interesting enough to attract the attention of many mathematicians (see [5]).
Now we assume that is an open interval with and n is a fixed positive integer. We consider the linear differential equation of nth order
where is an n times continuously differentiable function, are given continuous functions, and is also a given continuous function.
In general, we say that the differential Equation (1) has the Hyers–Ulam stability if the following statement is true for all : For any n times continuously differentiable (known) function that satisfies the inequality
for all , there is a solution of differential Equation (1) that satisfies
for each , where depends only on x and and for any fixed x.
If really depends on the value of x, then in a broad sense (but not in its strict sense) this case seems somewhat suitable for Hyers–Ulam-Rassias stability. Since there is not yet an appropriate formal term for this case, in this paper we try to say that differential Equation (1) has a type of Hyers–Ulam stability. For a more detailed definition of Hyers–Ulam stability, see [5].
Obłoza is generally credited for being the first mathematician to study the Hyers–Ulam stability of differential equations (see [6,7]). Indeed, Obłoza perfectly demonstrated the Hyers–Ulam stability of linear differential equations of the form
Since then, many mathematicians have dealt with this topic more broadly and in depth (see [8,9,10,11,12,13]).
In a recent paper [14], the authors investigated a type of Hyers–Ulam stability for the one-dimensional time-independent Schrödinger equation
when the system under observation has a symmetric parabolic potential wall.
In this paper, we prove a type of Hyers–Ulam stability of one-dimensional time-independent Schrödinger Equation (3) with a near-hyperbolic potential, where is the wave function, V is a hyperbolic potential function, ℏ is the reduced Planck constant, m is the mass of the particle, and E is the energy of the particle.
2. A Type of Hyers–Ulam Stability
In the following lemma, let be an open interval, where , and let X be a Banach space over , where denotes either or .
Lemma 1
([11]). Assume that is a continuously differentiable function and , and , are continuous functions. If y satisfies the inequality
for all , then there exists a unique continuously differentiable function such that
and
for all .
From now on, let c and k be fixed positive real numbers. We assume that the potential functions and are given by
Roughly speaking, our potential function is near-hyperbolic (see Figure 1).
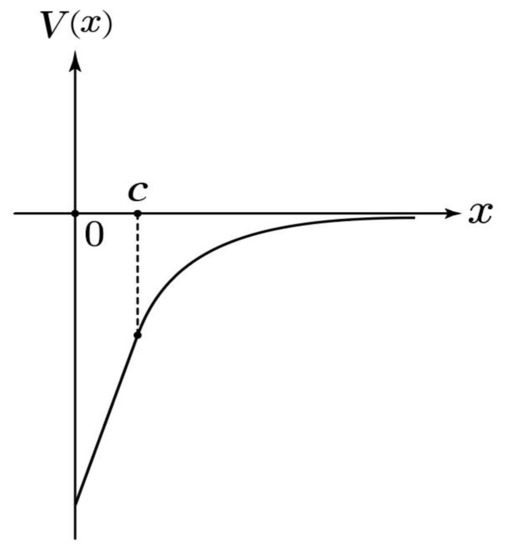
Figure 1.
Near-hyperbolic potential function.
In the following theorem, we exclude the point c from each of the domains of , , , , and to avoid trivially repeated calculations. We note that the following theorem is true whether or not we include the point c in their respective domains.
Theorem 1.
Assume that the potential functions and are given by (4). Let E be the energy of the particle under observation and let ε be any fixed positive real number. If twice continuously differentiable functions and satisfy the inequality
for all (when ) and (when ), then there exist twice continuously differentiable solutions and to the one-dimensional time-independent Schrödinger Equation (3) such that
for all (when ) and (when ), where and are solutions to the second-order linear differential Equations in (10), respectively, and where for and for .
Proof.
Given an open subset D of , we use () to denote the class of all (twice) continuously differentiable complex-valued functions defined on D. Considering the given potential functions and , we define the differential operators for and for as follows:
for all twice continuously differentiable functions and , where are not known yet but they are continuously differentiable functions to be determined later. Then, it follows from (7) that
for all (when ) and (when ).
If we assume that
for all (when ) and (when ), then
for all . That is, is a solution to the Riccati equation
for all (when ) and (when ).
If we set in the last equation, where the subindex for and for , it then follows from (4) that
Since every coefficient of each differential equation in (10) is continuous on the domain where the corresponding equation is defined, we confirm that the functions and exist.
Due to (5) and (8), we get
i.e.,
for all (when ) and (when ). If we set
then it follows from (7) and (11) that
for all (when ) and (when ).
According to Lemma 1, there exists a unique function that satisfies
and
for all (when ) and (when ), where we set for and for . That is, we get the following inequality
for all (when ) and (when ).
Due to Lemma 1 again, it follows from (13) that there exists a unique function that satisfies
and
for all (when ) and (when ).
To calculate the upper bound of inequality (6) in Theorem 1, we first have to solve differential equations of (10) to find and . On account of [15], we can find the general solutions of the differential equations of (10). We select the appropriate and according to the formulas given in Remark 1 and estimate the upper bound of the inequality (6).
Remark 1.
The general solution of the first equation in (10) is given by
where and are arbitrary complex numbers, is the Airy function and is the Airy Bi function. That is, and are linearly independent solutions of the Airy equation, . More precisely,
where , , , and are arbitrary complex constants and where we set and .
The general solution of the second equation in (10) is given by
where is the confluent hypergeometric function of the second kind and is the Kummer confluent hypergeometric function. More precisely,
3. Examples
As examples related to the subject of this paper, we consider the case of the hydrogen atom in this section.
As we know, is reduced Planck constant, , is the mass of electron, is the electron energy at its ground state. Then, and .
If we set , where is in units of Bohr radius and is the Bohr radius, then , , and .
For example, if we choose so that , i.e., , then , , , and . Therefore, putting and in Remark 1 yields
As we see in Figure 2, is positive and has no zeros on , and hence, the upper bound for inequality (6) exists.
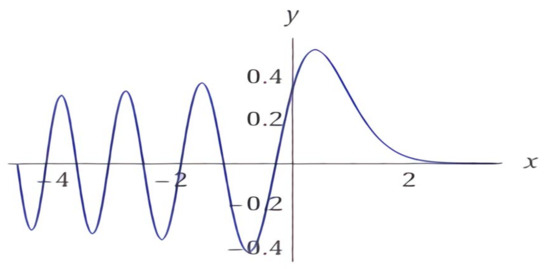
Figure 2.
has no zeros on .
Moreover, we have
for all , where and . We know that is an upper bound for inequality (6) when .
Using Wolfram Alpha to compute the above double integral for small values of x, we get Table 1:

Table 1.
In this table, denotes the Bohr radius of hydrogen atom.
If we put and in Remark 1 , then we have
for , where and is the Bohr radius. As we see in Figure 3, has no zeros on , and thus, the upper bound for inequality (6) exists.
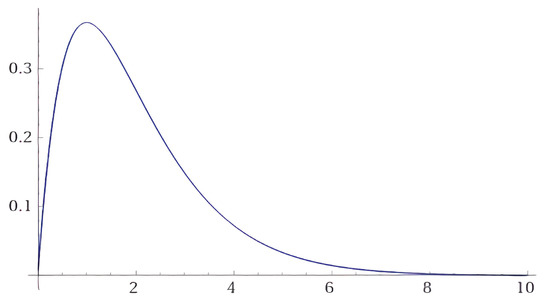
Figure 3.
has no zeros on .
Furthermore, we see that
for any , where and . We know that is an upper bound for inequality (6) when .
Using Wolfram Alpha to compute the above double integral for some values of x, we get Table 2:
Table 2.
In this table, denotes the Bohr radius of hydrogen atom.
Unfortunately, is a very fast increasing function.
4. Discussion
When it is difficult to find an exact solution of the Schrödinger equation for a particular potential, we can apply the perturbation theory to that equation. Moreover, we know that the one-dimensional Schrödinger equation can be applied to analyze the state of a particle reflected by a rectangular potential, which was the subject of a previous paper [16].
Since the difference between the perturbed solution and the exact solution of the one-dimensional time-independent Schrödinger Equation (3) is strongly influenced by x, we did not prove in Theorem 1 the exact Hyers–Ulam stability of the Schrödinger equation when the most of potential curve is hyperbolic. Therefore, it can be said that in this paper we dealt with a type of Hyers–Ulam stability.
The inequality (6) will be satisfied whatever and we choose which satisfy the formulas in Remark 1, but the upper bound of inequality (6) may depend strongly upon the choices of and . Of course, the smaller the upper bound of the inequality, the better it is. But unfortunately we do not know what choices of and should be in order to reduce the upper bound of the inequality. We think that this question is worthy of another study separately from this paper.
5. Conclusions
In this paper, we investigated a type of Hyers–Ulam stability of the one-dimensional time-independent Schrödinger equation by using the operator method when the potential function is nearly expressed by a hyperbolic curve.
This problem is of great significance as it is suitable for describing the state of an electron of a hydrogen atom in nature. The electron may first be unstable in its transient state but it quickly reaches its stable state via the stability of the relevant Schrödinger equation. In other words, the stability of the Schrödinger equation with the relevant potential guarantees that the perturbed orbit will quickly come back to its corresponding stable orbit.
To the best of our knowledge, no papers have yet addressed this kind of stability problem. Therefore, it can be said that the value of this paper is high.
Author Contributions
Conceptualization, B.K. and S.-M.J.; methodology, B.K. and S.-M.J.; software, B.K. and S.-M.J.; formal analysis, B.K. and S.-M.J.; investigation, B.K. and S.-M.J.; resources, B.K. and S.-M.J.; data curation, B.K. and S.-M.J.; writing—original draft preparation, S.-M.J.; writing—review and editing, B.K. and S.-M.J.; visualization, B.K. and S.-M.J.; supervision, S.-M.J.; project administration, S.-M.J.; funding acquisition, B.K. and S.-M.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. 2020R1F1A1A01049560). This work was supported by 2020 Hongik University Research Fund.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ulam, S.M. A Collection of Mathematical Problems; Interscience Publ.: New York, NY, USA, 1960. [Google Scholar]
- Hyers, D.H. On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 1941, 27, 222–224. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rassias, T.M. On the stability of the linear mapping in Banach spaces. Proc. Am. Math. Soc. 1978, 72, 297–300. [Google Scholar] [CrossRef]
- Găvruţa, P. A generalization of the Hyers–Ulam-Rassias stability of approximately additive mappings. J. Math. Anal. Appl. 1994, 184, 431–436. [Google Scholar] [CrossRef] [Green Version]
- Hyers, D.H.; Isac, G.; Rassias, T.M. Stability of Functional Equations in Several Variables; Birkhäuser: Boston, MA, USA, 1998. [Google Scholar]
- Oboza, M. Hyers stability of the linear differential equation. Rocznik Nauk.-Dydakt. Prace Mat. 1993, 13, 259–270. [Google Scholar]
- Oboza, M. Connections between Hyers and Lyapunov stability of the ordinary differential equations. Rocznik Nauk.-Dydakt. Prace Mat. 1997, 14, 141–146. [Google Scholar]
- Alsina, C.; Ger, R. On some inequalities and stability results related to the exponential function. J. Inequal. Appl. 1998, 2, 373–380. [Google Scholar] [CrossRef]
- Cîmpean, D.S.; Popa, D. On the stability of the linear differentia equation of higher order with constant coefficients. Appl. Math. Comput. 2010, 217, 4141–4146. [Google Scholar]
- Dragičević, D. Hyers–Ulam stability for nonautonomous semilinear dynamics on bounded intervals. Mediterr. J. Math. 2021, 18, 71. [Google Scholar] [CrossRef]
- Popa, D.; Raşa, I. On the Hyers–Ulam stability of the linear differential equation. J. Math. Anal. Appl. 2011, 381, 530–537. [Google Scholar] [CrossRef] [Green Version]
- Takahasi, S.-E.; Miura, T.; Miyajima, S. On the Hyers–Ulam stability of the Banach space-valued differential equation y′ = λy. Bull. Korean Math. Soc. 2002, 39, 309–315. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Zhou, M.; Sun, L. Hyers–Ulam stability of linear differential equations of first order. Appl. Math. Lett. 2008, 21, 1024–1028. [Google Scholar] [CrossRef] [Green Version]
- Jung, S.-M.; Kim, B. Perturbation of one-dimensional time independent Schrödinger equation with a symmetric parabolic potential wall. Symmetry 2020, 12, 1089. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables; Dover Publ.: New York, NY, USA, 1983. [Google Scholar]
- Jung, S.-M.; Choi, G. Perturbation of the One-Dimensional Time-Independent Schrödinger Equation with a Rectangular Potential Barrier. Open Math. 2020, 18, 1413–1422. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).