

Optimal Location of Exit Doors for Efficient Evacuation of Crowds at Gathering Places

 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. The State System
2.2. The Optimal Control Problem
2.3. Numerical Resolution
2.3.1. Space-Time Discretization
2.3.2. Numerical Optimization
3. Results and Discussion
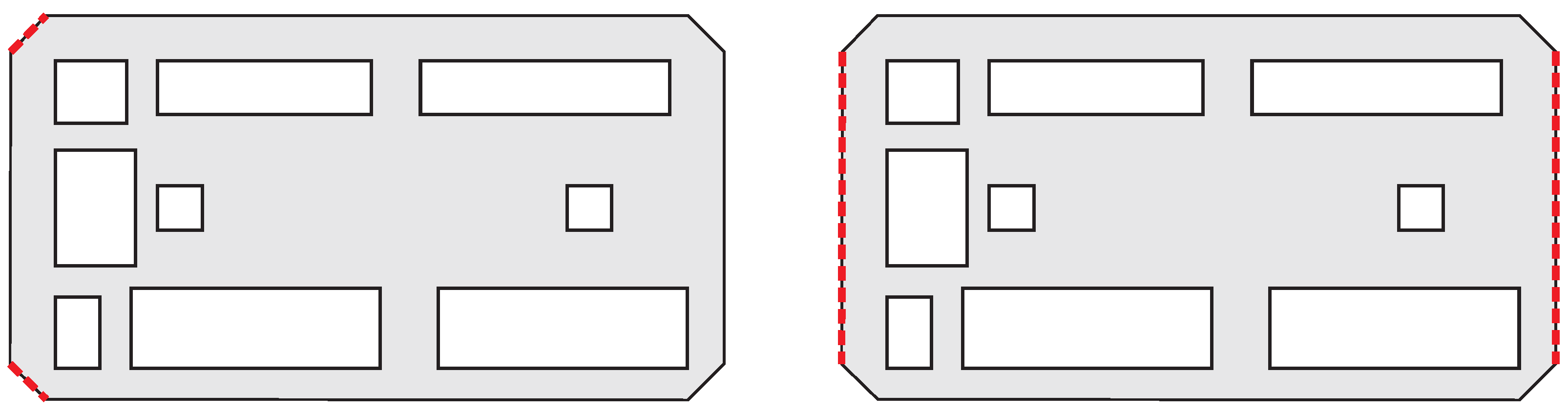
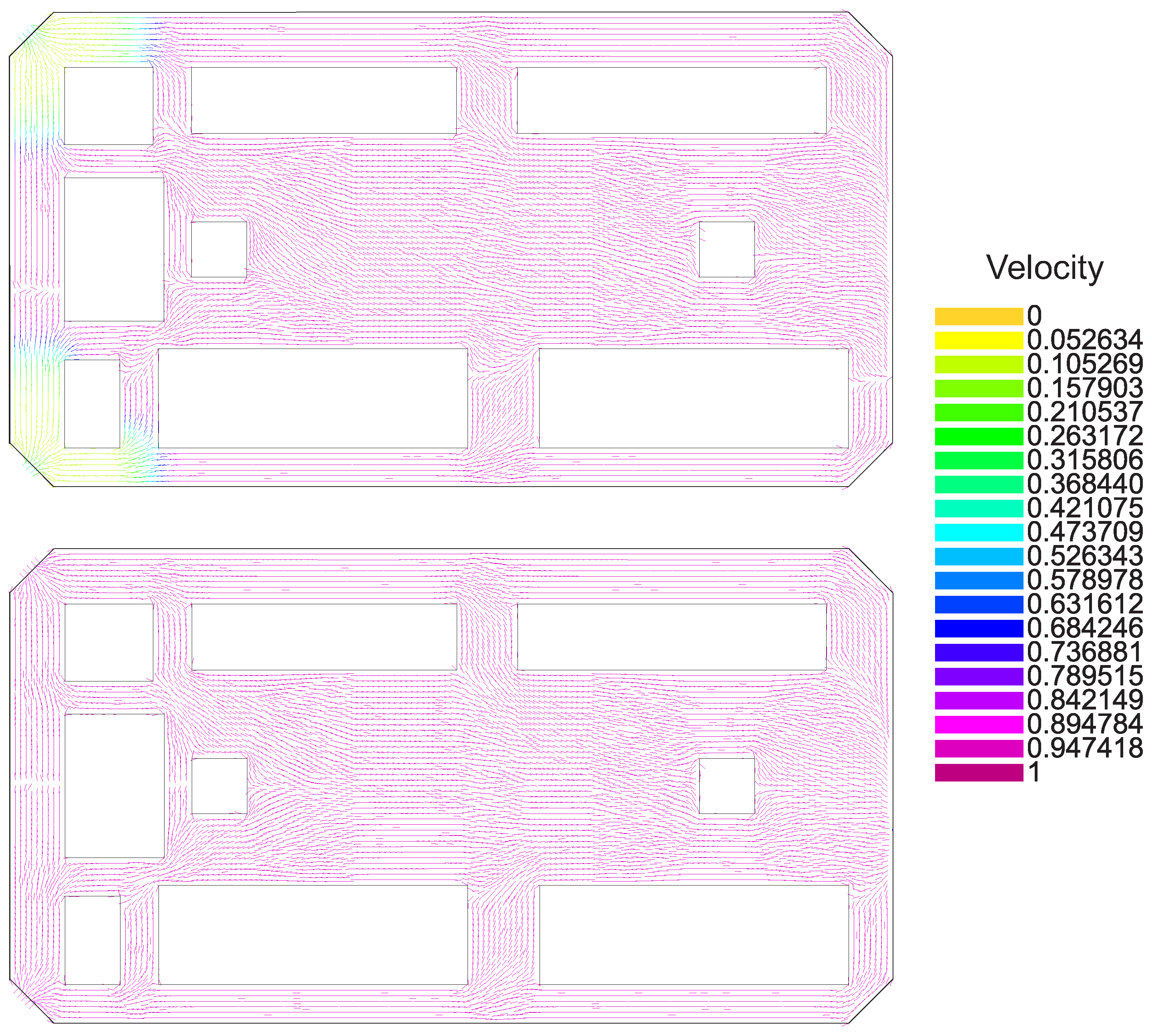
3.1. Case 1: Exit Doors in Left Corners
3.2. Case 2: Exit Doors in Left and Right Sides
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Taneja, L.; Bolia, N.B. Network redesign for efficient crowd flow and evacuation. Appl. Math. Model. 2018, 53, 251–266. [Google Scholar] [CrossRef]
- Henderson, L.F. On the fluid mechanics of human crowd motion. Transp. Res. 1974, 8, 509–515. [Google Scholar] [CrossRef]
- Hirai, K.; Tarui, K. A simulation of the behavior of a crowd in panic. In Proceedings of the 1975 International Conference on Cybernetics and Society, San Francisco, CA, USA, 23–25 September 1975; pp. 409–411. [Google Scholar]
- Hughes, R. A continuum theory for the flow of pedestrians. Transp. Res. Part B Methodol. 2002, 36, 507–535. [Google Scholar] [CrossRef]
- Bellomo, N.; Dogbé, C. On the Modeling of Traffic and Crowds: A Survey of Models, Speculations, and Perspectives. SIAM Rev. 2011, 53, 409–463. [Google Scholar] [CrossRef]
- Martinez-Gil, F.; Lozano, M.; García-Fernandez, I.; Fernandez, F. Modeling, evaluation, and scale on artificial pedestrians: A literature review. ACM Comput. Surv. 2017, 50, 1–35. [Google Scholar] [CrossRef]
- Kachroo, P.; Al-nasur, S.J.; Wadoo, S.A.; Shende, A. Pedestrian Dynamics. Feedback Control of Crowd Evacuation, Understanding Complex Systems; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Cristiani, E.; Piccoli, B.; Tosin, A. Multiscale Modeling of Pedestrian Dynamics, Modeling, Simulation & Applications; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Maury, B.; Faure, S. Crowds in Equations. An Introduction to the Microscopic Modeling of Crowds; World Scientific: Singapore, 2019. [Google Scholar]
- Amadori, D.; Goatin, P.; Rosini, M.D. Existence results for Hughes’ model for pedestrian flows. J. Math. Anal. Appl. 2014, 420, 387–406. [Google Scholar]
- Di Francesco, M.; Fagioli, S.; Rosini, M.D.; Russo, G. Deterministic particle approximation of the Hughes model in one space dimension. Kinet. Rel. Mod. 2017, 10, 215–237. [Google Scholar] [CrossRef]
- Xia, Y.; Wong, S.C.; Zhang, M.; Shu, C.W.; Lam, W.H.K. An efficient discontinuous Galerkin method on triangular meshes for a pedestrian flow model. Int. J. Numer. Methods Eng. 2008, 76, 337–350. [Google Scholar] [CrossRef]
- Huang, L.; Wong, S.C.; Zhang, M.; Shu, C.W.; Lam, W.H.K. Revisiting Hughes’ dynamic continuum model for pedestrian flow and the development of an efficient solution algorithm. Transp. Res. Part Methodol. 2009, 53, 127–141. [Google Scholar]
- Piccoli, B.; Tosin, A. Time-Evolving Measures and Macroscopic Modeling of Pedestrian Flow. Arch. Ration. Mech. Anal. 2011, 199, 707–738. [Google Scholar] [CrossRef]
- Hoogendoorn, S.; Wageningen-Kessels, F.L.M.; Daamen, W.; Duives, D.C. Continuum modelling of pedestrian flows: From microscopic principles to self-organised macroscopic phenomena. Physica A 2014, 416, 684–694. [Google Scholar] [CrossRef]
- Carrillo, J.A.; Martin, S.; Wolfram, M.T. An improved version of the Hughes model for pedestrian flow. Math. Models Methods Appl. Sci. 2016, 26, 671–697. [Google Scholar] [CrossRef]
- Carlini, E.; Festa, A.; Silva, F.J.; Wolfram, M.T. A Semi-Lagrangian Scheme for a Modified Version of the Hughes’ Model for Pedestrian Flow. Dyn. Games Appl. 2017, 7, 683–705. [Google Scholar] [CrossRef]
- Aghamohammadi, R.; Laval, J.A. Dynamic traffic assignment using the macroscopic fundamental diagram: A Review of vehicular and pedestrian flow models. Transp. Res. Part Methodol. 2020, 137, 99–118. [Google Scholar] [CrossRef]
- Cristiani, E.; De Santo, A.; Menci, M. A generalized mean-field game model for the dynamics of pedestrians with limited predictive abilities. Commun. Math. Sci. 2022; in press. [Google Scholar]
- Cristiani, E.; Priuli, F.S.; Tosin, A. Modeling rationality to control self-organization of crowds: An environmental approach. SIAM J. Appl. Math. 2015, 75, 605–619. [Google Scholar] [CrossRef]
- Hoogendoorn, S.; Bovy, P.H.L. Simulation of pedestrian flows by optimal control and differential games. Optim. Control Appl. Meth. 2003, 24, 53–172. [Google Scholar] [CrossRef]
- Molyneaux, N.; Scarinci, R.; Bierlaire, M. Design and analysis of control strategies for pedestrian flows. Transportation 2021, 48, 1767–1807. [Google Scholar] [CrossRef]
- Saadatseresht, M.; Mansourian, A.; Taleai, M. Evacuation planning using multiobjective evolutionary optimization approach. Eur. J. Oper. Res. 2009, 198, 305–314. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, M.; Lu, X.; Tian, L.; Yu, Z.; Huang, K.; Wang, Y.; Li, T. Optimal layout design of obstacles for panic evacuation using differential evolution. Physica A 2017, 465, 175–194. [Google Scholar] [CrossRef]
- Cristiani, E.; Peri, D. Handling obstacles in pedestrian simulations: Models and optimization. Appl. Math. Model. 2017, 45, 285–302. [Google Scholar] [CrossRef]
- Shende, A.; Singh, M.P.; Kachroo, P. Optimization-based feedback control for pedestrian evacuation from an exit corridor. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1167–1176. [Google Scholar] [CrossRef]
- Kamkarian, P.; Hexmoor, H. Exploiting the Imperialist Competition algorithm to determine exit door efficacy for public buildings. Simulation 2014, 90, 24–51. [Google Scholar] [CrossRef]
- Tian, H.-H.; Dong, L.-Y.; Yu, X. Influence of the exits’ configuration on evacuation process in a room without obstacle. Physica A 2015, 420, 64–78. [Google Scholar]
- Wu, J.; Wang, X.; Chen, J.; Shu, G.; Li, Y. The position of a door can significantly impact on pedestrians’ evacuation time in an emergency. Appl. Math. Comput. 2015, 258, 29–35. [Google Scholar] [CrossRef]
- Khamis, N.; Selamat, H.; Ismail, F.S.; Lutfy, O.F.; Haniff, M.F.; Nordin, I.N. Optimized exit door locations for a safer emergency evacuation using crowd evacuation model and artificial bee colony optimization. Chaos Solitons Fractals 2020, 131, 109505. [Google Scholar] [CrossRef]
- Gurumoorthy, K.S.; Rangarajan, A. A Schrödinger equation for the fast computation of approximate Euclidean distance functions. In International Conference on Scale Space and Variational Methods in Computer Vision; Springer: Berlin/Heidelberg, Germany, 2009; pp. 100–111. [Google Scholar]
- Churbanov, A.G.; Vabishchevich, P.N. Numerical solution of boundary value problems for the eikonal equation in an anisotropic medium. J. Comput. Appl. Math. 2019, 362, 55–67. [Google Scholar]
- Axthelm, R. Finite Element Simulation of a Macroscopic Model for Pedestrian Flow. In Traffic and Granular Flow’15; Springer: Cham, Switzerland, 2016; pp. 233–240. [Google Scholar]
- Herzog, R.A.; Pietschmann, J.F.; Winkler, M. Optimal control of Hughes’ model for pedestrian flow via local attraction. arXiv 2020, arXiv:2011.03580. [Google Scholar]
- Vázquez-Méndez, M.E.; Alvarez-Vázquez, L.J.; García-Chan, N.; Martinez, A. Optimal management of an urban road network with an environmental perspective. Comput. Math. Appl. 2019, 77, 1786–1797. [Google Scholar] [CrossRef]
- García-Chan, N.; Alvarez-Vázquez, L.J.; Martinez, A.; Vázquez-Méndez, M.E. Bilevel optimal control of urban traffic-related air pollution by means of Stackelberg strategies. Optim. Eng. 2022, 23, 1165–1188. [Google Scholar] [CrossRef]
- Nelder, J.A.; Mead, R. A simplex method for function minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- Price, W.L. A controlled random search procedure for global optimisation. Comput. J. 1977, 20, 367–370. [Google Scholar] [CrossRef]
- Hecht, F. New development in Freefem++. J. Numer. Math. 2012, 20, 251–265. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alvarez-Vázquez, L.J.; García-Chan, N.; Martínez, A.; Rodríguez, C.; Vázquez-Méndez, M.E. Optimal Location of Exit Doors for Efficient Evacuation of Crowds at Gathering Places. Axioms 2022, 11, 592. https://doi.org/10.3390/axioms11110592
Alvarez-Vázquez LJ, García-Chan N, Martínez A, Rodríguez C, Vázquez-Méndez ME. Optimal Location of Exit Doors for Efficient Evacuation of Crowds at Gathering Places. Axioms. 2022; 11(11):592. https://doi.org/10.3390/axioms11110592
Chicago/Turabian StyleAlvarez-Vázquez, Lino J., Néstor García-Chan, Aurea Martínez, Carmen Rodríguez, and Miguel E. Vázquez-Méndez. 2022. "Optimal Location of Exit Doors for Efficient Evacuation of Crowds at Gathering Places" Axioms 11, no. 11: 592. https://doi.org/10.3390/axioms11110592
APA StyleAlvarez-Vázquez, L. J., García-Chan, N., Martínez, A., Rodríguez, C., & Vázquez-Méndez, M. E. (2022). Optimal Location of Exit Doors for Efficient Evacuation of Crowds at Gathering Places. Axioms, 11(11), 592. https://doi.org/10.3390/axioms11110592