
An Information-Theoretic Framework for Optimal Design: Analysis of Protocols for Estimating Soft Tissue Parameters in Biaxial Experiments


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
2.1. Mathematical Model of the Biaxial Experiments
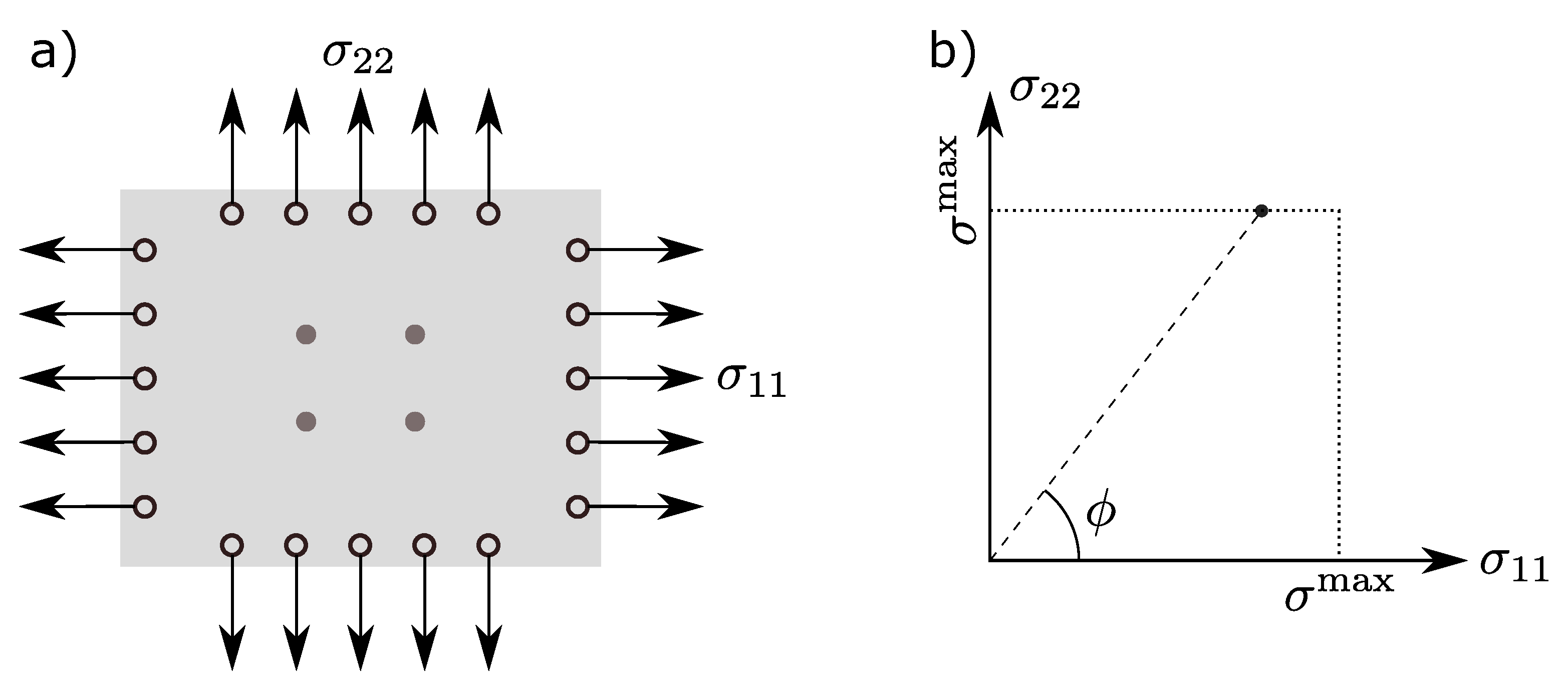
2.1.1. Biaxial Experiments for Soft-Tissues
2.1.2. Protocol Definition
2.2. Information-Theoretic Framework for Optimal Design
2.2.1. Optimal Design Problem
2.2.2. Information-Theoretic Quantities for Optimal Design
- The mutual information for any single parameter may be maximised, giving . This approach only concerns the posterior of the parameter and ignores all other parameters;
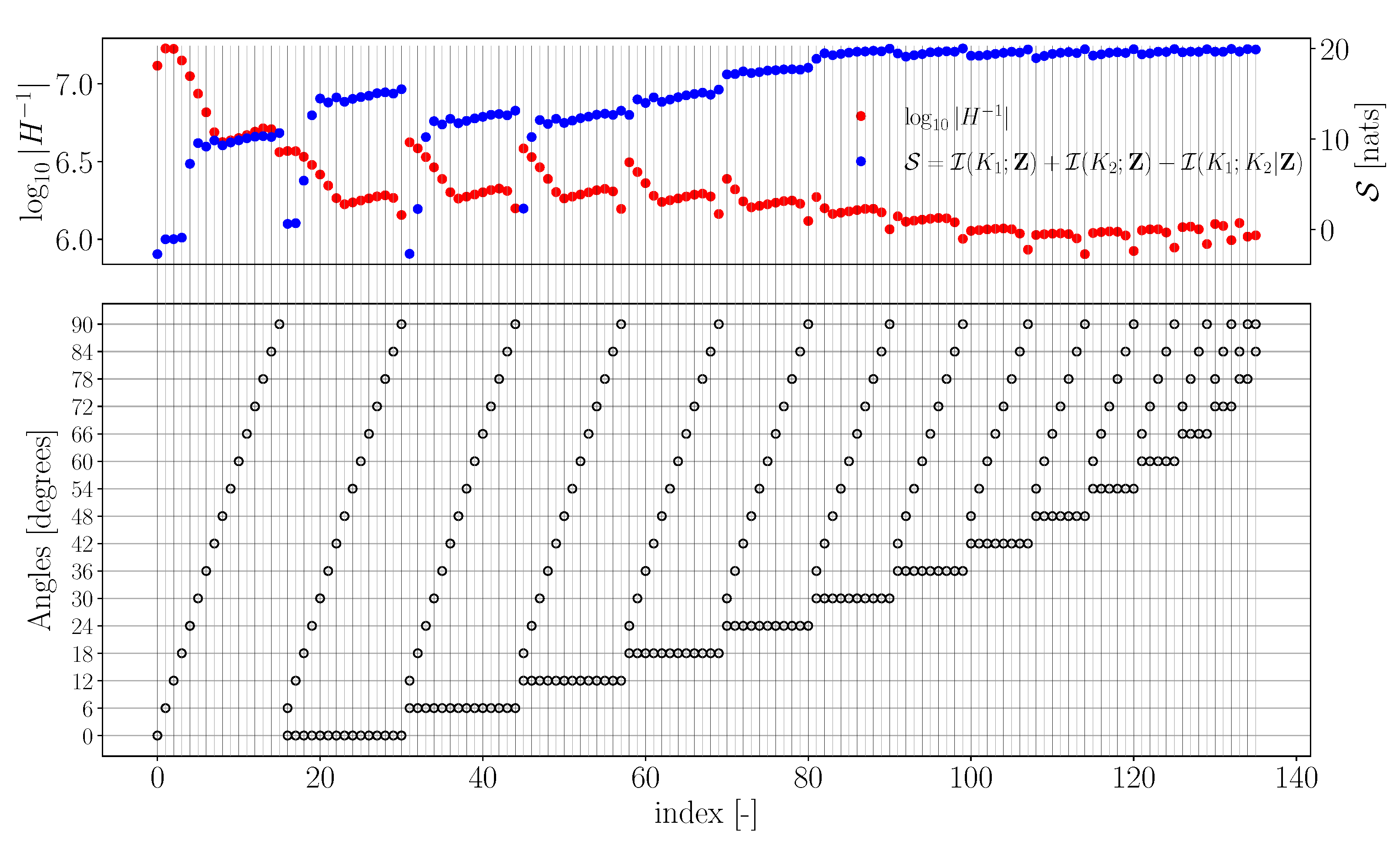
- The joint mutual information may be maximised, giving . In the sense of classical optimal design, this can be interpreted as D-optimal design. This is because D-optimal designs minimise the determinant of the inverse Fisher Information Matrix, and measures the information gain in the joint space;
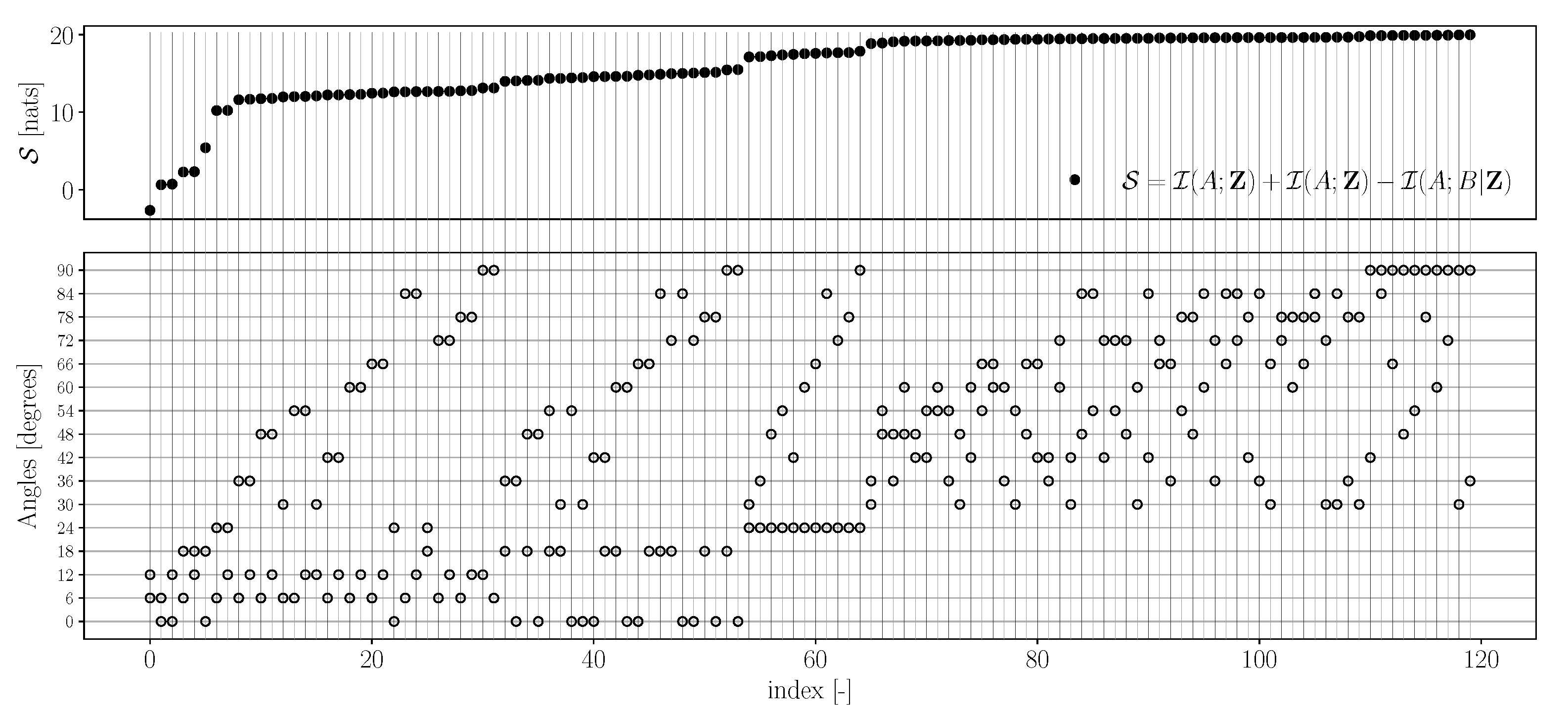
- The sum of individual parameter mutual information may be be maximised, giving . In the sense of classical optimal design, this can be interpreted as A-optimal design. This is because A-optimal design minimises the trace of the inverse Fisher Information Matrix, and measures the sum of the information gains for all the parameters;
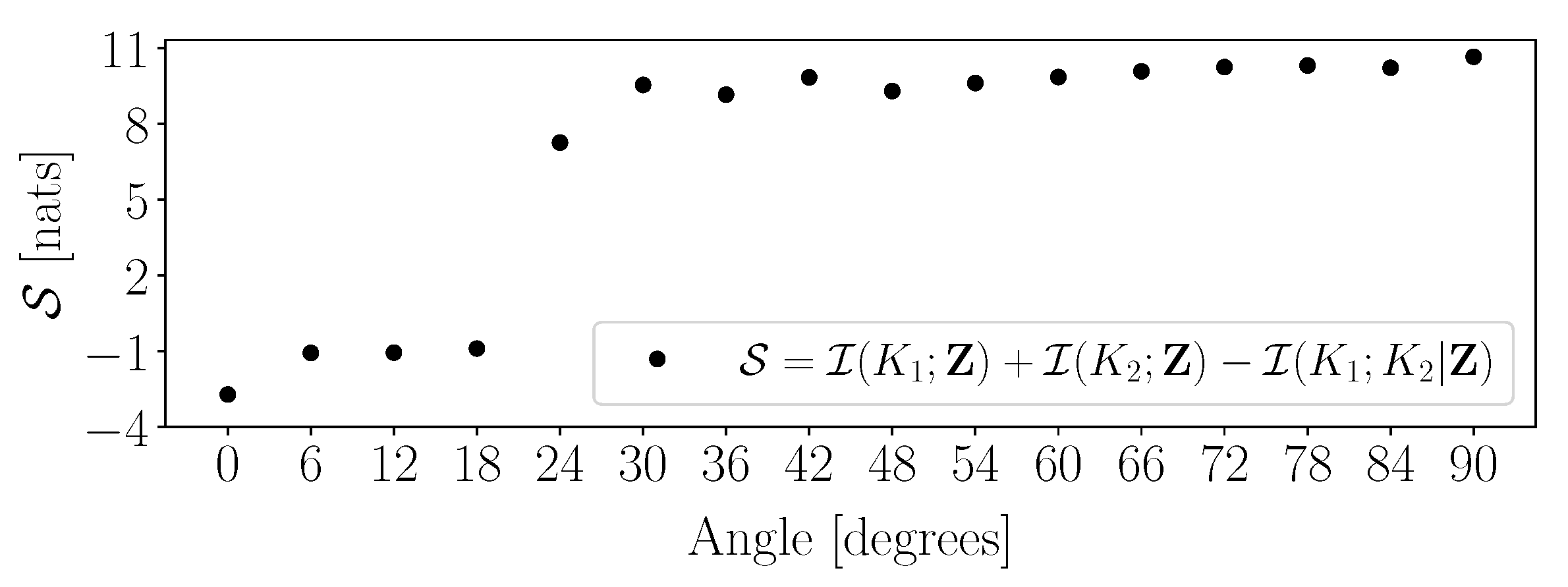
- Alternatively, one may seek to maximise individual parameter information gain while minimising pairwise CMI, thus seeking both small posterior variances and minimising pairwise correlations between the parameters. In this case, the statistical criterion iswhere is a regularisation parameter. Note that high CMI implies that a large amount of information can be gained only about a combination of the two parameters (for instance, their sum or product), but not for each parameter individually. Thus, we seek to minimise the CMI.
2.2.3. Estimating Mutual Information
2.2.4. Dimensionality Reduction for the Biaxial Experiment
2.2.5. Validation of Results against Existing Methods
2.2.6. Overview of Approach for the Biaxial Experiments
3. Results and Discussion
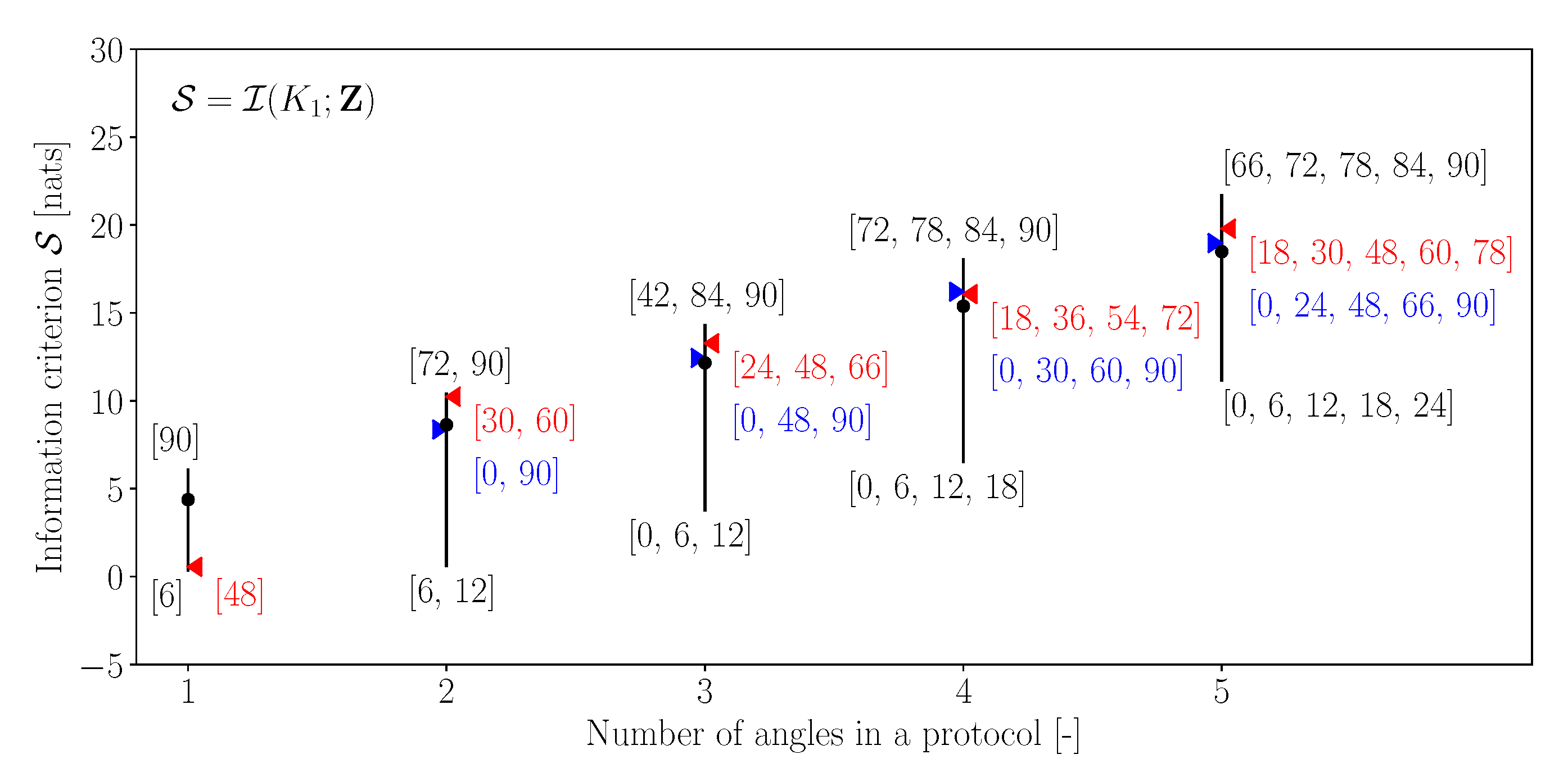
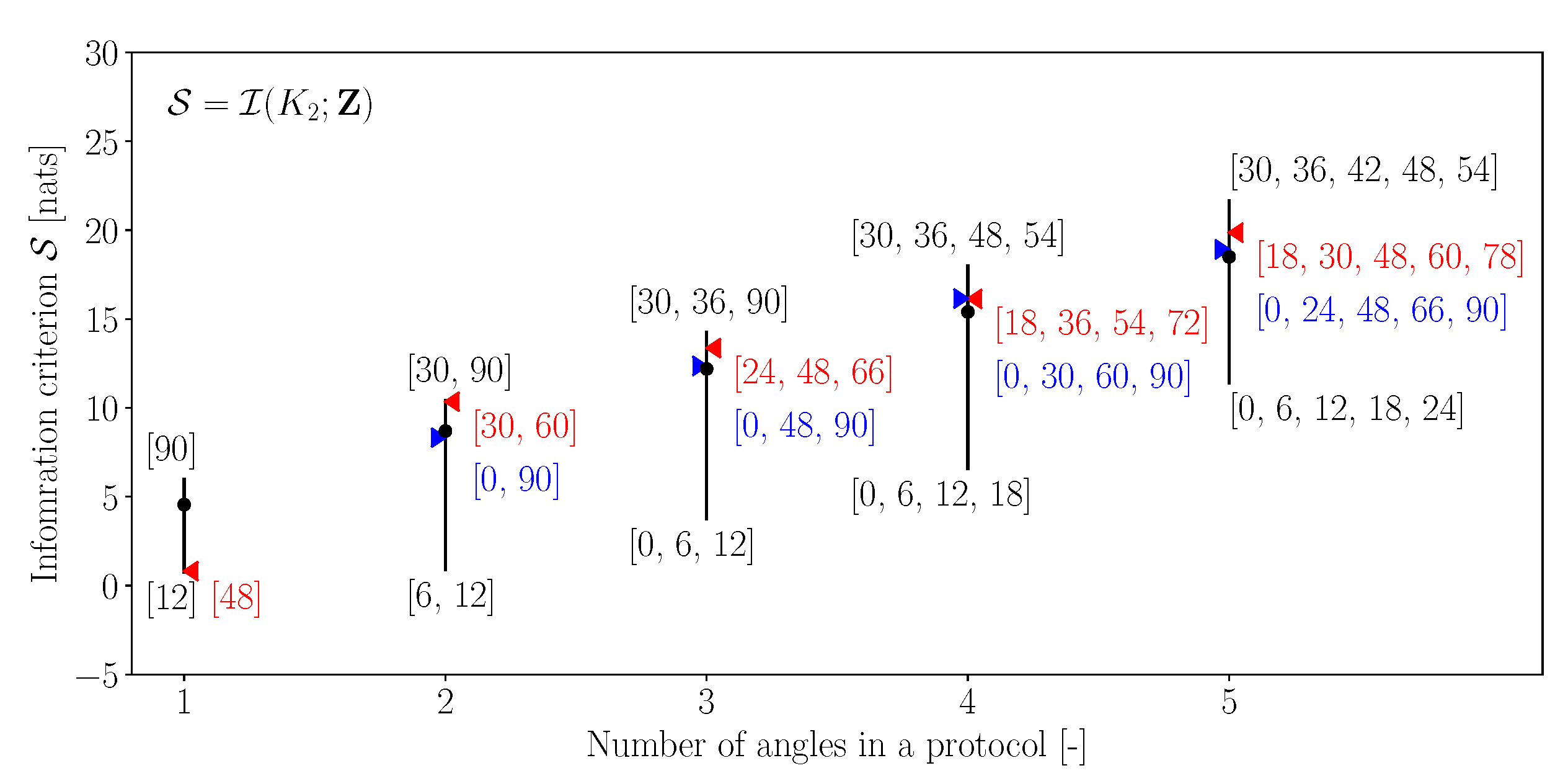
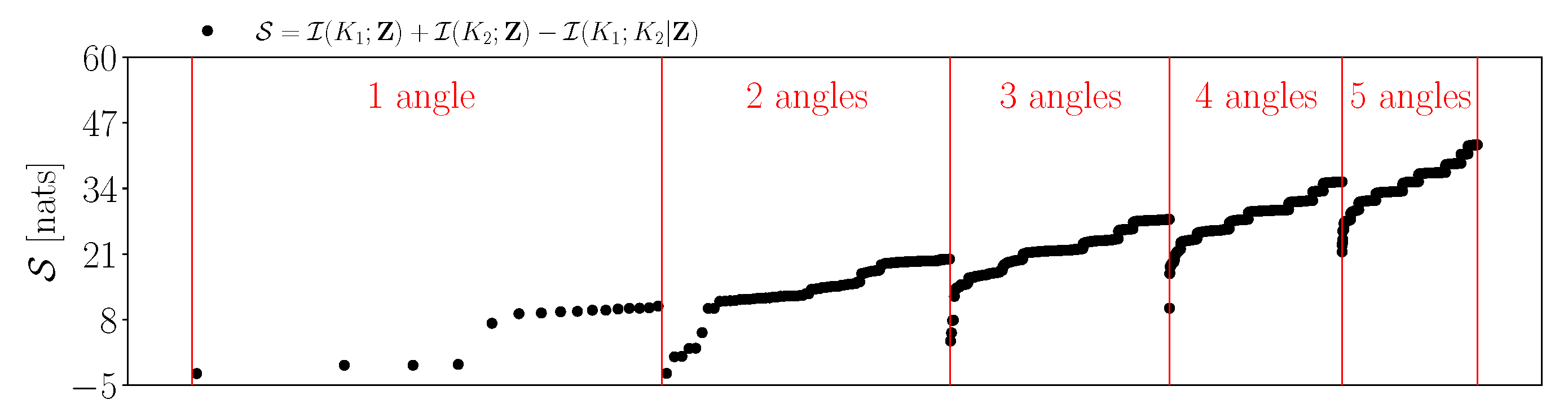
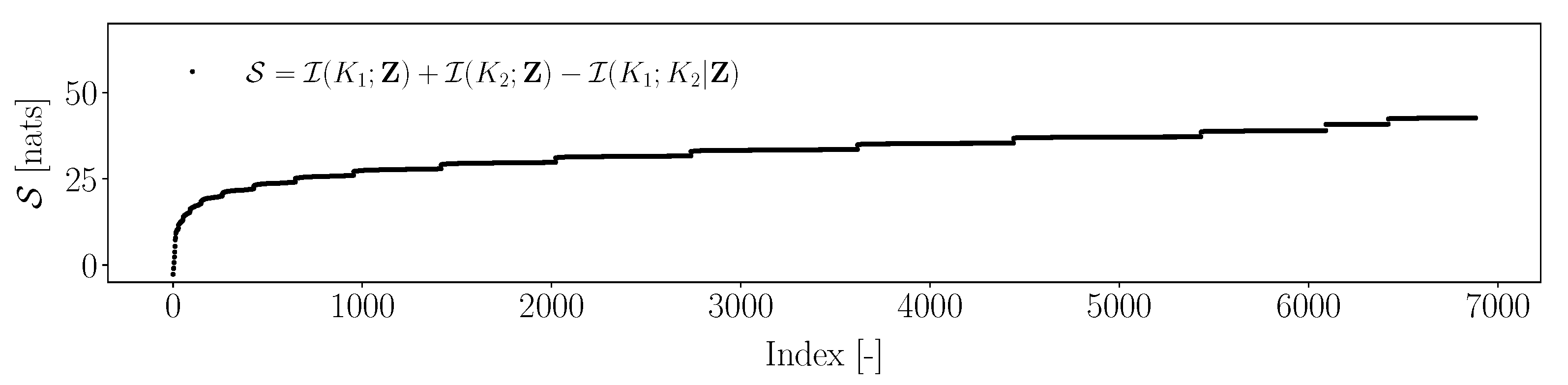
- Generally, all the three information criteria increase with the increasing number of angles in the protocol. Intuitively, this is expected, as a higher number of angles implies more measurement data and hence a higher potential for the improved estimation of the parameters. This observation is true for the maximum information gain, minimum information gain and the mean information gain;
- Across all the three criteria, it is observed that the uniform discretisation is not necessarily reflective of the best protocol for estimating the parameters. In fact, in most cases, the performance of uniform discretisation is close to the mean information gain observed across all the angle combinations;
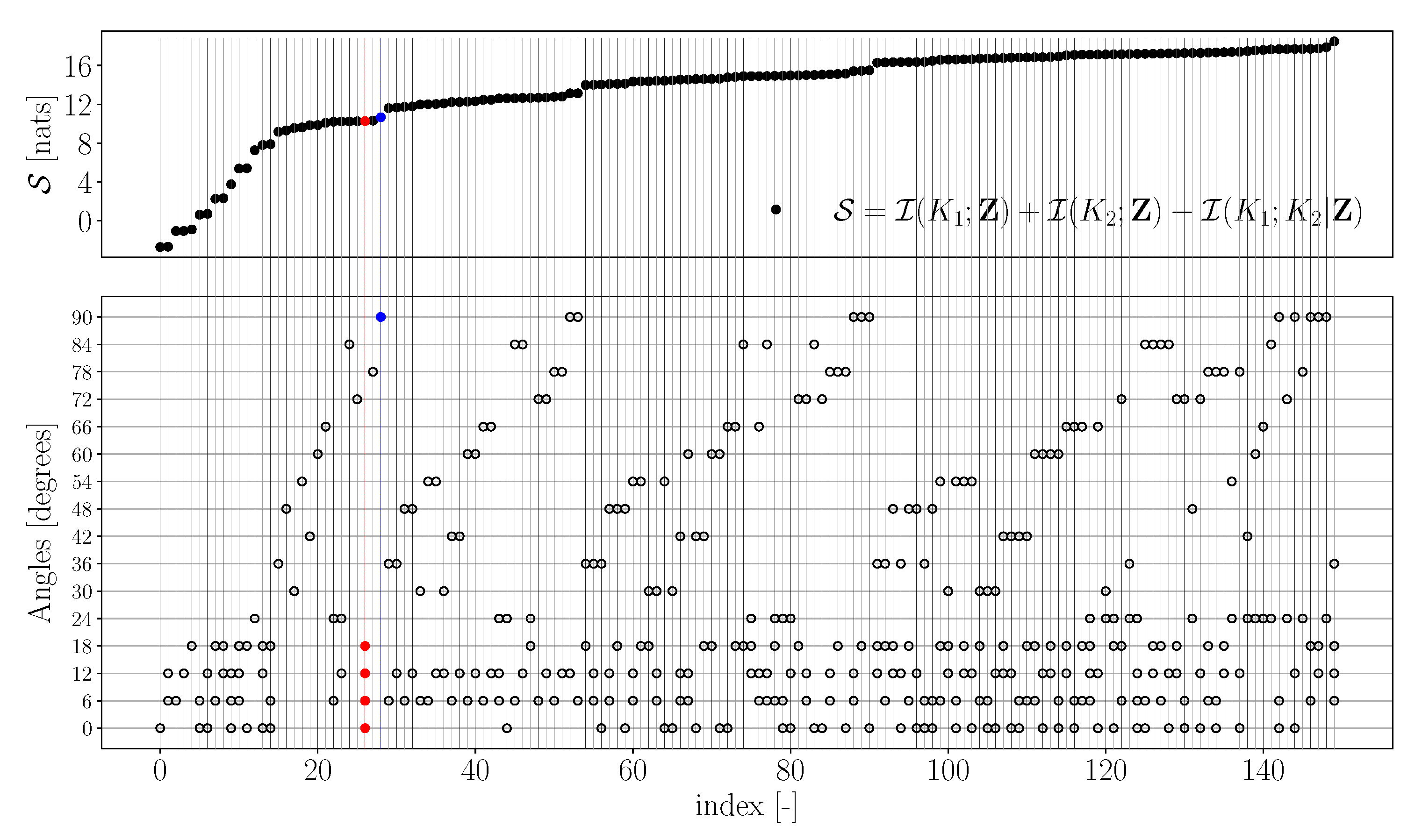
- From Figure 2 and Figure 3, it is observed that the angular combinations that maximise information gain for are not identical—and vary significantly when more than two angles are simultaneously used—to those that maximise information gain for . This further motivates the use of a criterion that balances information gains in both the parameters while minimising their interdependence;
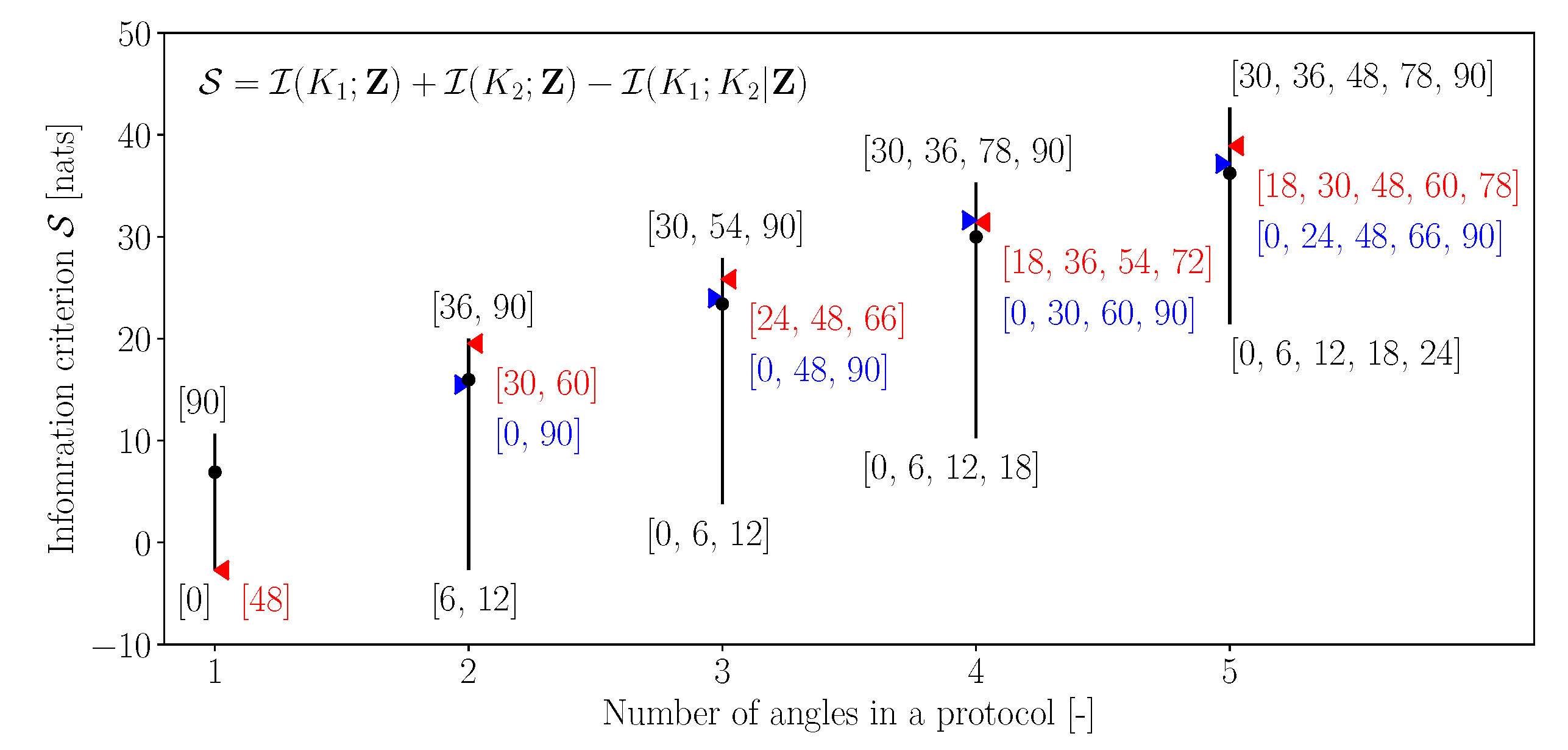
- Figure 4 shows that the best combinations that maximise a balanced criterion, such as , are a trade-off between the combinations of angles that maximise and individually. For example, when five angles are considered, the angles that maximise are and those that maximise are , while the combination that maximises is , which has two angles from and three angles from . It should be noted that such a trade-off between maximising individual parameter gains is still significantly different to a uniform discretisation;
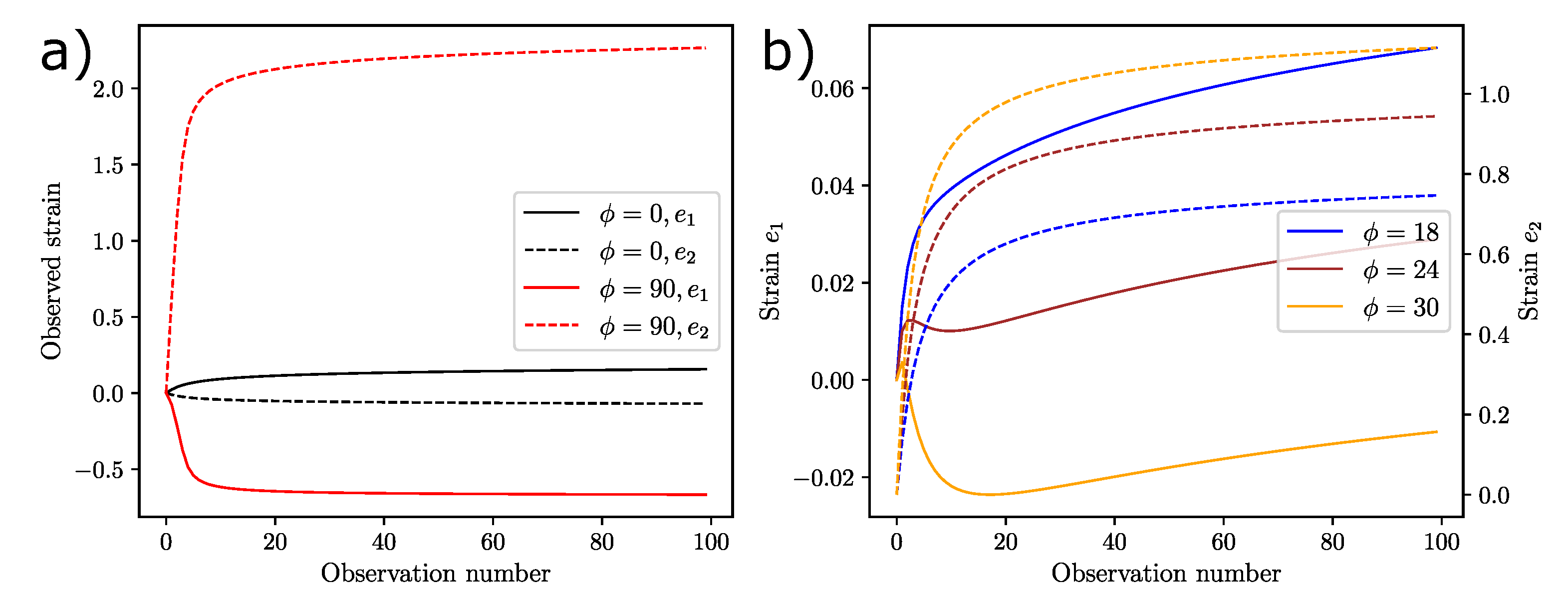
- Finally, it is observed that the worst combinations are all low angles: . This can be related to the fact that, at low angles, the applied stress is largely aligned along the stiff fibers of the tissue, thus resulting in lower strain values. Thus, the lower angles provide a small range of the observations, while the larger angles provide a larger range (Figure 5a), thereby containing more information about the parameters.
4. Conclusions
5. Limitations and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Holzapfel, G.A. Nonlinear Solid Mechanics; Wiley: Chichester, UK, 2000; Volume 24. [Google Scholar]
- Zhang, W.; Feng, Y.; Lee, C.H.; Billiar, K.L.; Sacks, M.S. A generalized method for the analysis of planar biaxial mechanical data using tethered testing configurations. J. Biomech. Eng. 2015, 137, 064501. [Google Scholar] [CrossRef] [PubMed]
- Labrosse, M.R.; Jafar, R.; Ngu, J.; Boodhwani, M. Planar biaxial testing of heart valve cusp replacement biomaterials: Experiments, theory and material constants. Acta Biomater. 2016, 45, 303–320. [Google Scholar] [CrossRef]
- Humphrey, J.; Yin, F. On constitutive relations and finite deformations of passive cardiac tissue: I. A pseudostrain-energy function. J. Biomech. Eng. 1987, 109, 298–304. [Google Scholar] [CrossRef]
- Laurence, D.; Ross, C.; Jett, S.; Johns, C.; Echols, A.; Baumwart, R.; Towner, R.; Liao, J.; Bajona, P.; Wu, Y.; et al. An investigation of regional variations in the biaxial mechanical properties and stress relaxation behaviors of porcine atrioventricular heart valve leaflets. J. Biomech. 2019, 83, 16–27. [Google Scholar] [CrossRef] [PubMed]
- Jett, S.V.; Hudson, L.T.; Baumwart, R.; Bohnstedt, B.N.; Mir, A.; Burkhart, H.M.; Holzapfel, G.A.; Wu, Y.; Lee, C.H. Integration of polarized spatial frequency domain imaging (pSFDI) with a biaxial mechanical testing system for quantification of load-dependent collagen architecture in soft collagenous tissues. Acta Biomater. 2020, 102, 149–168. [Google Scholar] [CrossRef] [PubMed]
- Billiar, K.L.; Sacks, M.S. Biaxial mechanical properties of the native and glutaraldehyde-treated aortic valve cusp: Part II–a structural constitutive model. J. Biomech. Eng. 2000, 122, 327–335. [Google Scholar] [CrossRef] [PubMed]
- Ross, C.; Laurence, D.; Wu, Y.; Lee, C.H. Biaxial Mechanical Characterizations of Atrioventricular Heart Valves. J. Vis. Exp. JoVE 2019. [Google Scholar] [CrossRef] [PubMed]
- Maurel, W.; Thalmann, D.; Wu, Y.; Thalmann, N.M. Constitutive Modeling. In Biomechanical Models for Soft Tissue Simulation; Springer: Berlin/Heidelberg, Germany, 1998; pp. 79–120. [Google Scholar]
- Holzapfel, G.A.; Gasser, T.C.; Ogden, R.W. A new constitutive framework for arterial wall mechanics and a comparative study of material models. J. Elast. Phys. Sci. Solids 2000, 61, 1–48. [Google Scholar]
- May-Newman, K.; Yin, F.C.P. A constitutive law for mitral valve tissue. J. Biomech. Eng. 1998, 120, 38–47. [Google Scholar] [CrossRef]
- Pukelsheim, F. Optimal Design of Experiments; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 2006. [Google Scholar]
- Banks, H.T.; Holm, K.; Kappel, F. Comparison of optimal design methods in inverse problems. Inverse Probl. 2011, 27, 075002. [Google Scholar] [CrossRef] [PubMed]
- Banks, H.T.; Dediu, S.; Ernstberger, S.L.; Kappel, F. Generalized sensitivities and optimal experimental design. J. Inv. Ill-Posed Problems. 2010, 18, 25–83. [Google Scholar] [CrossRef]
- Banks, H.T.; Rubio, D.; Saintier, N.; Troparevsky, M.I. Optimal design techniques for distributed parameter systems. In Proceedings of the 2013 Conference on Control and Its Applications, San Diego, CA, USA, 8–10 July 2013; pp. 83–90. [Google Scholar]
- Lindley, D.V. On a measure of the information provided by an experiment. Ann. Math. Stat. 1956, 27, 986–1005. [Google Scholar] [CrossRef]
- Sebastiani, P.; Wynn, H.P. Maximum entropy sampling and optimal Bayesian experimental design. J. R. Stat. Soc. Ser. (Stat. Methodol.) 2000, 62, 145–157. [Google Scholar] [CrossRef]
- Capellari, G.; Chatzi, E.; Mariani, S. Parameter identifiability through information theory. In Proceedings of the 2nd ECCOMAS Thematic Conference on Uncertainty Quantification in Computational Sciences and Engineering (UNCECOMP), Rhodes Island, Greece, 15–17 June 2017; pp. 15–17. [Google Scholar]
- Bryant, C.; Terejanu, G. An information-theoretic approach to optimally calibrate approximate models. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; p. 153. [Google Scholar]
- Terejanu, G.; Upadhyay, R.R.; Miki, K. Bayesian experimental design for the active nitridation of graphite by atomic nitrogen. Exp. Therm. Fluid Sci. 2012, 36, 178–193. [Google Scholar] [CrossRef]
- Huan, X.; Marzouk, Y.M. Simulation-based optimal Bayesian experimental design for nonlinear systems. J. Comput. Phys. 2013, 232, 288–317. [Google Scholar] [CrossRef]
- Liepe, J.; Filippi, S.; Komorowski, M.; Stumpf, M.P. Maximizing the information content of experiments in systems biology. PLoS Comput. Biol. 2013, 9, e1002888. [Google Scholar] [CrossRef] [PubMed]
- Lewis, A.; Smith, R.; Williams, B.; Figueroa, V. An information theoretic approach to use high-fidelity codes to calibrate low-fidelity codes. J. Comput. Phys. 2016, 324, 24–43. [Google Scholar] [CrossRef]
- Gasser, T.C.; Ogden, R.W.; Holzapfel, G.A. Hyperelastic modelling of arterial layers with distributed collagen fibre orientations. J. R. Soc. Interface 2006, 3, 15–35. [Google Scholar] [CrossRef] [PubMed]
- Aggarwal, A. An improved parameter estimation and comparison for soft tissue constitutive models containing an exponential function. Biomech. Model. Mechanobiol. 2017, 16, 1309–1327. [Google Scholar] [CrossRef] [PubMed]
- Aggarwal, A. Effect of Residual and Transformation Choice on Computational Aspects of Biomechanical Parameter Estimation of Soft Tissues. Bioengineering 2019, 6, 100. [Google Scholar] [CrossRef] [PubMed]
- Pant, S.; Lombardi, D. An information-theoretic approach to assess practical identifiability of parametric dynamical systems. Math. Biosci. 2015, 268, 66–79. [Google Scholar] [CrossRef]
- Pant, S. Information sensitivity functions to assess parameter information gain and identifiability of dynamical systems. J. R. Soc. Interface 2018, 15, 20170871. [Google Scholar] [CrossRef]
- Moon, Y.I.; Rajagopalan, B.; Lall, U. Estimation of mutual information using kernel density estimators. Physical Rev. E 1995, 52, 2318. [Google Scholar] [CrossRef] [PubMed]
- Kraskov, A.; Stögbauer, H.; Grassberger, P. Estimating mutual information. Phys. Rev. E 2004, 69, 066138. [Google Scholar] [CrossRef] [PubMed]
- Lombardi, D.; Pant, S. Nonparametric k-nearest-neighbor entropy estimator. Phys. Rev. E 2016, 93, 013310. [Google Scholar] [CrossRef] [PubMed]
- Beirlant, J.; Dudewicz, E.J.; Györfi, L.; Van der Meulen, E.C. Nonparametric entropy estimation: An overview. Int. J. Math. Stat. Sci. 1997, 6, 17–39. [Google Scholar]
- Gao, S.; Ver Steeg, G.; Galstyan, A. Efficient estimation of mutual information for strongly dependent variables. In Proceedings of the Eighteenth International Conference on Artificial Intelligence and Statistics, San Diego, CA, USA, 9–12 May 2015; pp. 277–286. [Google Scholar]
- Benner, P.; Gugercin, S.; Willcox, K. A survey of projection-based model reduction methods for parametric dynamical systems. SIAM Rev. 2015, 57, 483–531. [Google Scholar] [CrossRef]
- Benner, P.; Ohlberger, M.; Cohen, A.; Willcox, K. Model Reduction and Approximation: Theory and Algorithms; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 2017. [Google Scholar]
- Quarteroni, A.; Rozza, G. Reduced Order Methods for Modeling and Computational Reduction; Springer: Berlin/Heidelberg, Germany, 2014; Volume 9. [Google Scholar]
- Ma, Y.; Fu, Y. Manifold Learning Theory and Applications; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Amsallem, D.; Haasdonk, B. PEBL-ROM: Projection-error based local reduced-order models. Adv. Model. Simul. Eng. Sci. 2016, 3, 1–25. [Google Scholar] [CrossRef]
- Maday, Y.; Stamm, B. Locally adaptive greedy approximations for anisotropic parameter reduced basis spaces. SIAM J. Sci. Comput. 2013, 35, A2417–A2441. [Google Scholar] [CrossRef]
- Belghazi, M.I.; Baratin, A.; Rajeshwar, S.; Ozair, S.; Bengio, Y.; Courville, A.; Hjelm, D. Mutual information neural estimation. In Proceedings of the Machine Learning Research, Stockholmsmässan, Stockholm Sweden, 10–15 July 2018; pp. 531–540. [Google Scholar]
- Singh, S.; Póczos, B. Generalized exponential concentration inequality for Rényi divergence estimation. In Proceedings of the 31st International Conference on Machine Learning, Bejing, China, 22–24 June 2014; pp. 333–341. [Google Scholar]
- Kleinegesse, S.; Drovandi, C.; Gutmann, M.U. Sequential Bayesian experimental design for implicit models via mutual information. Bayesian Anal. 2021, 1, 1–30. [Google Scholar] [CrossRef]
- Fukumizu, K. Nonparametric Bayesian inference with kernel mean embedding. In Modern Methodology and Applications in Spatial-Temporal Modeling; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1–24. [Google Scholar]
- Moon, K.R.; Hero, A.O. Ensemble estimation of multivariate f-divergence. In Proceedings of the 2014 IEEE International Symposium on Information Theory, Honolulu, HI, USA, 29 June–4 July 2014; pp. 356–360. [Google Scholar]
- Brodu, N.; Crutchfield, J.P. Discovering Causal Structure with Reproducing-Kernel Hilbert Space ϵ-Machines. arXiv 2020, arXiv:2011.14821. [Google Scholar]
- Gökmen, D.E.; Ringel, Z.; Huber, S.D.; Koch-Janusz, M. Phase diagrams with real-space mutual information neural estimation. arXiv 2021, arXiv:2103.16887. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aggarwal, A.; Lombardi, D.; Pant, S. An Information-Theoretic Framework for Optimal Design: Analysis of Protocols for Estimating Soft Tissue Parameters in Biaxial Experiments. Axioms 2021, 10, 79. https://doi.org/10.3390/axioms10020079
Aggarwal A, Lombardi D, Pant S. An Information-Theoretic Framework for Optimal Design: Analysis of Protocols for Estimating Soft Tissue Parameters in Biaxial Experiments. Axioms. 2021; 10(2):79. https://doi.org/10.3390/axioms10020079
Chicago/Turabian StyleAggarwal, Ankush, Damiano Lombardi, and Sanjay Pant. 2021. "An Information-Theoretic Framework for Optimal Design: Analysis of Protocols for Estimating Soft Tissue Parameters in Biaxial Experiments" Axioms 10, no. 2: 79. https://doi.org/10.3390/axioms10020079
APA StyleAggarwal, A., Lombardi, D., & Pant, S. (2021). An Information-Theoretic Framework for Optimal Design: Analysis of Protocols for Estimating Soft Tissue Parameters in Biaxial Experiments. Axioms, 10(2), 79. https://doi.org/10.3390/axioms10020079