Estimation of Water Demand in Water Distribution Systems Using Particle Swarm Optimization



Abstract
1. Introduction
2. Literature Review
3. Methodology
3.1. Objective Function
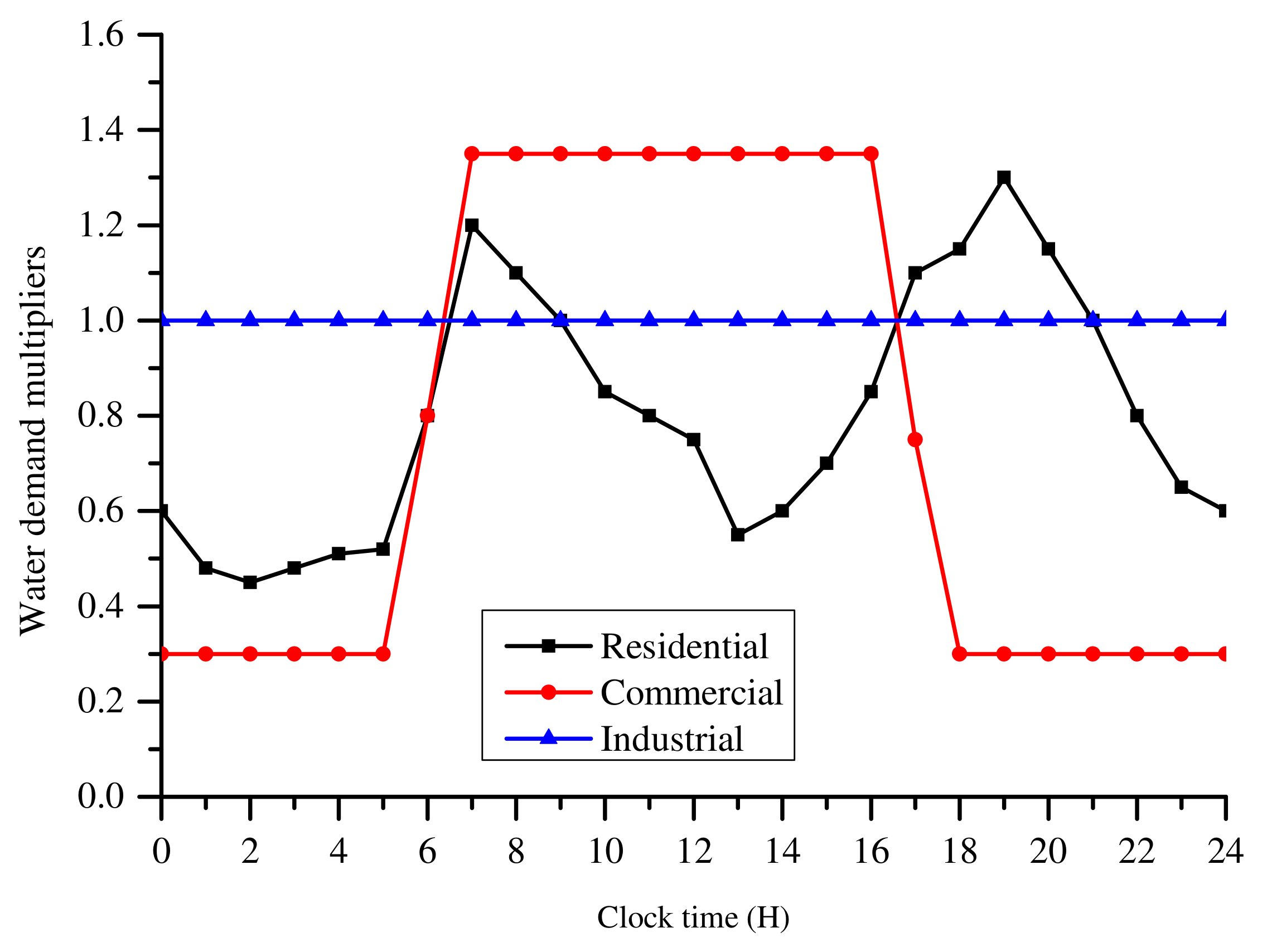
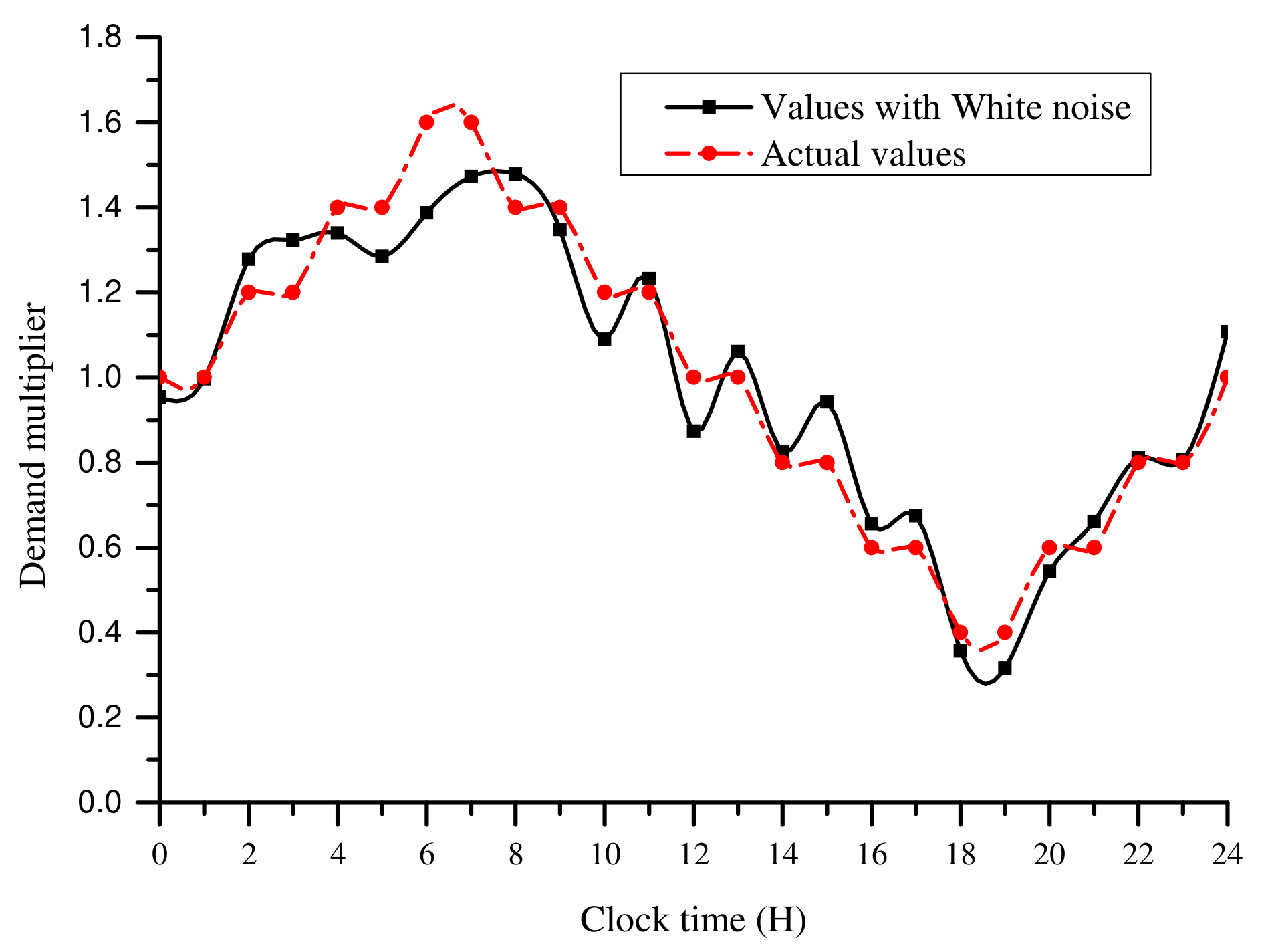
3.2. Modeling of Water Demand Multipliers
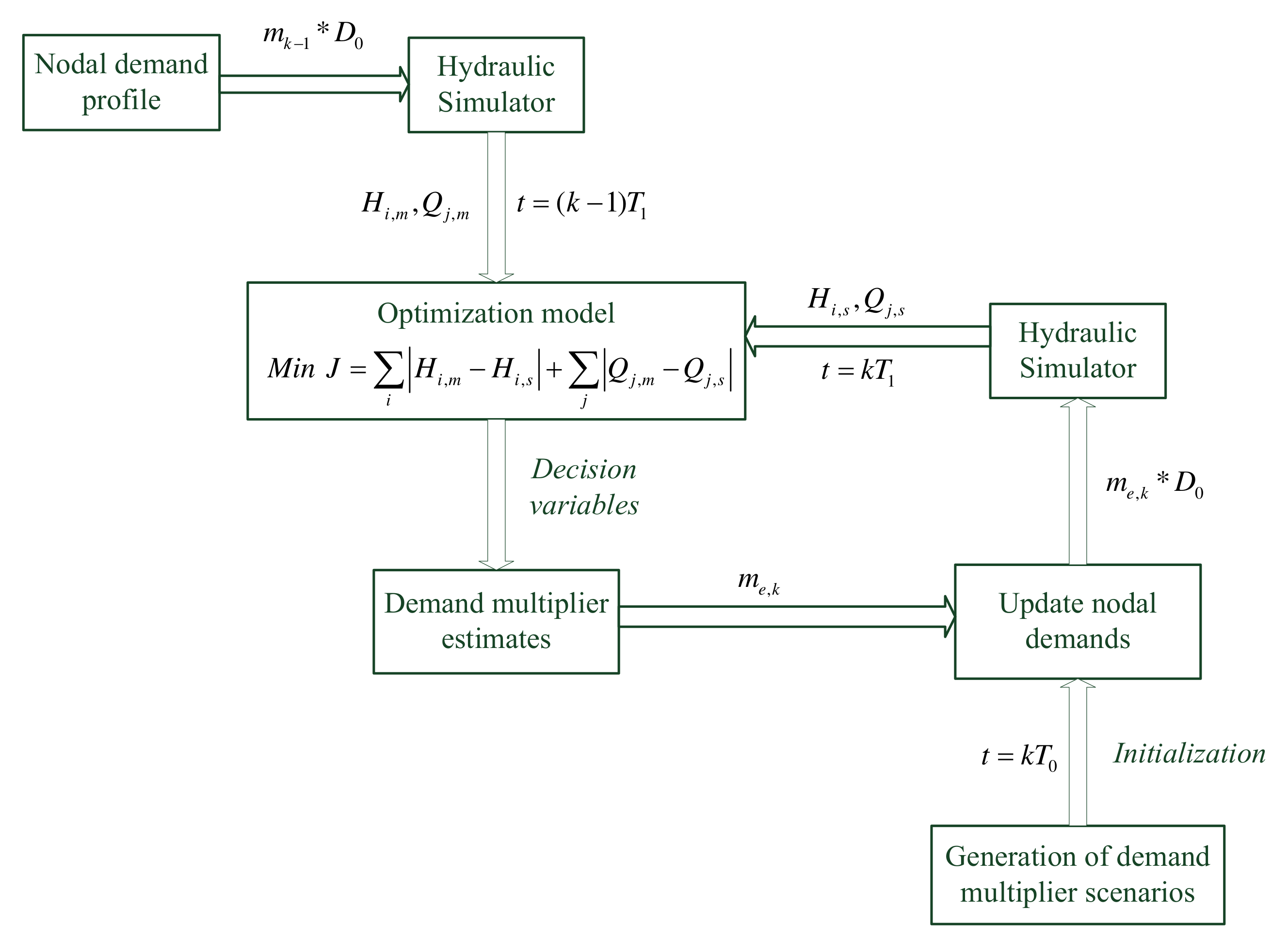
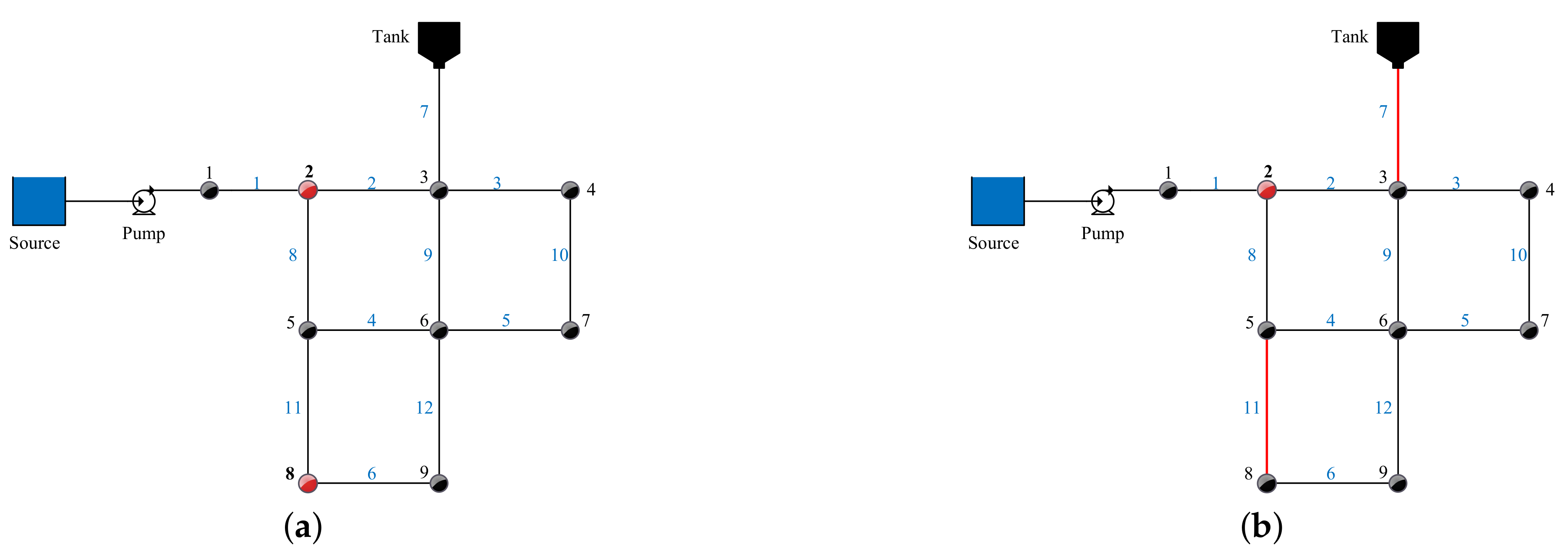
3.3. Process Simulation Model
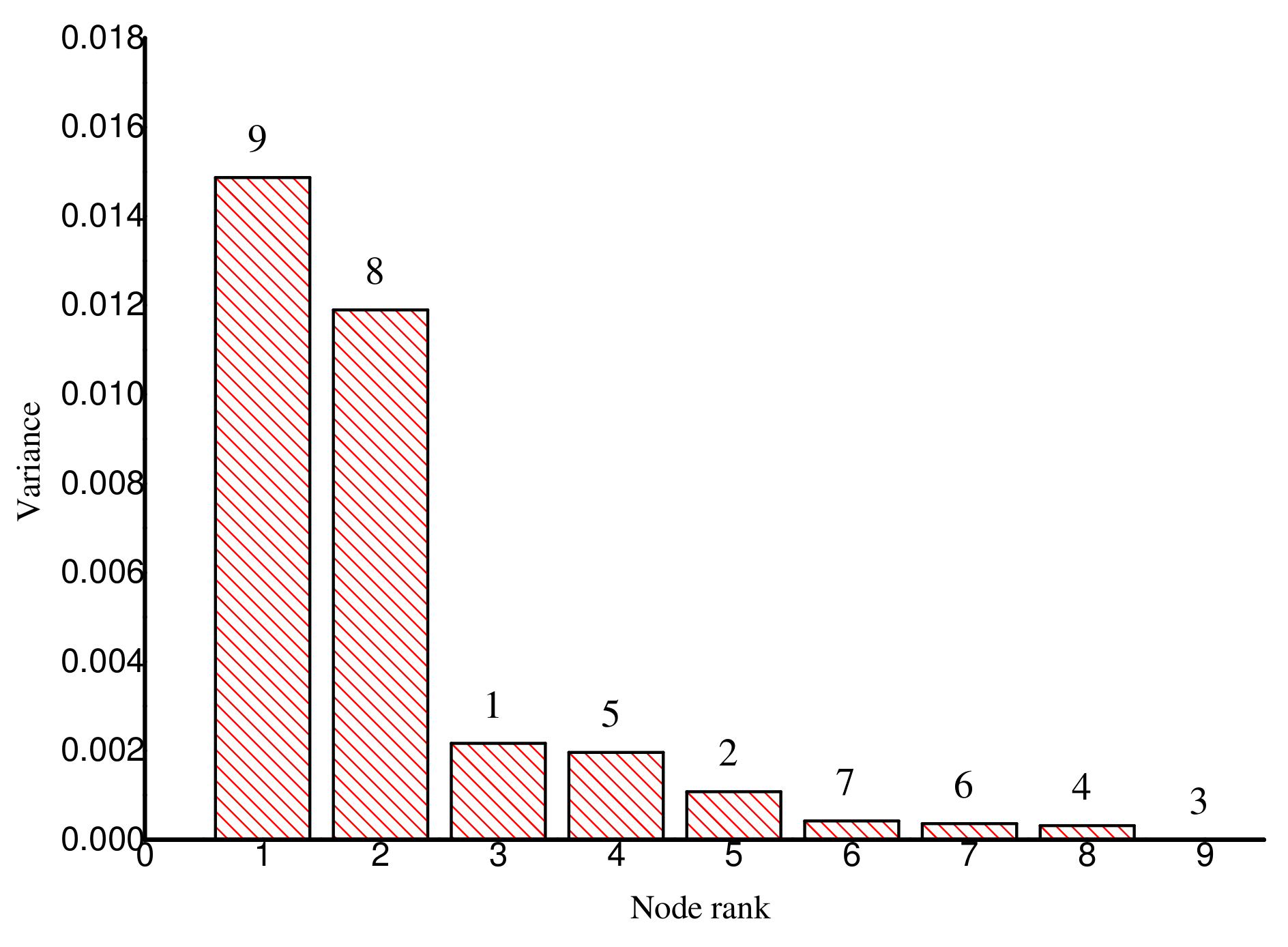
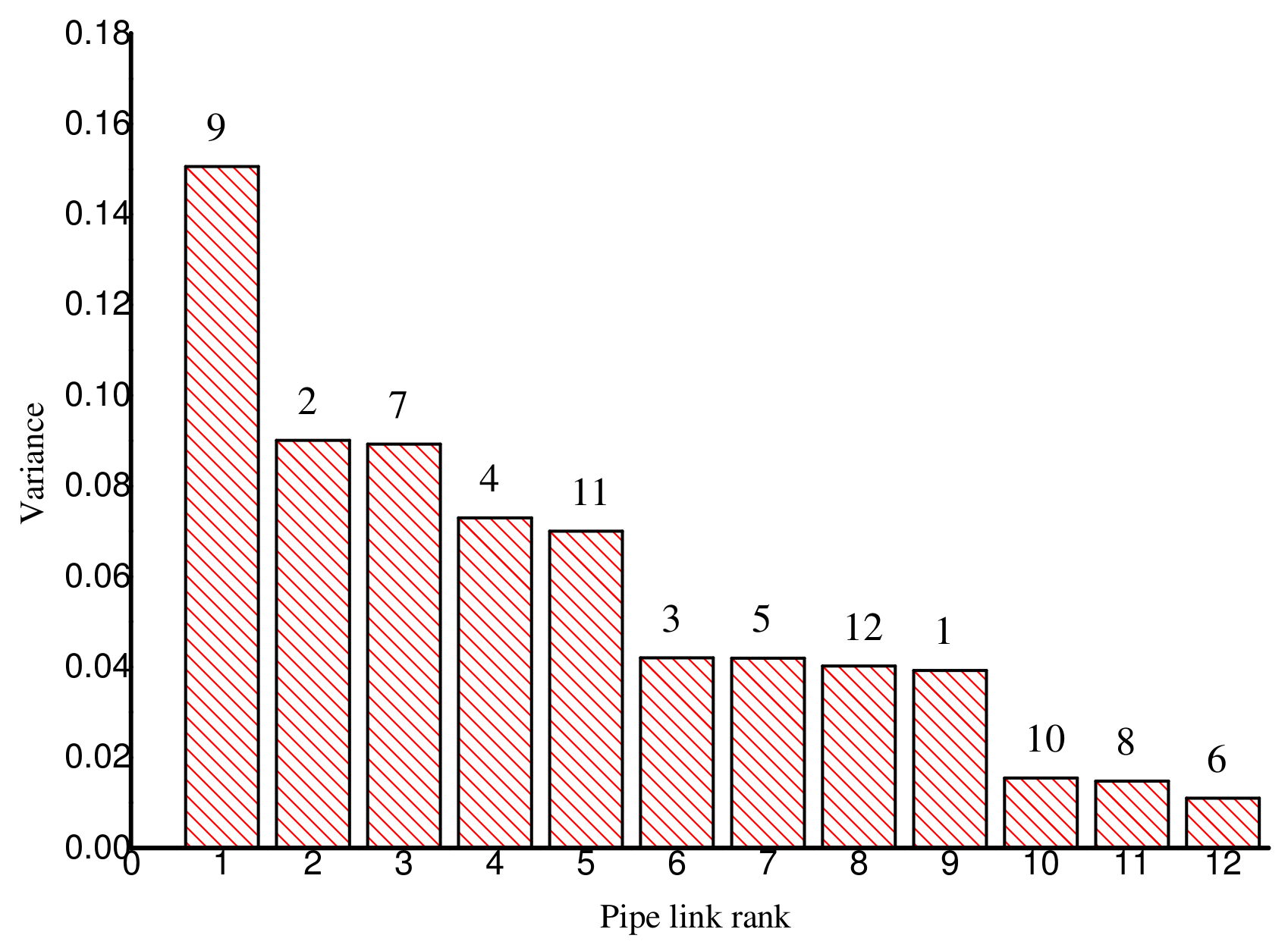
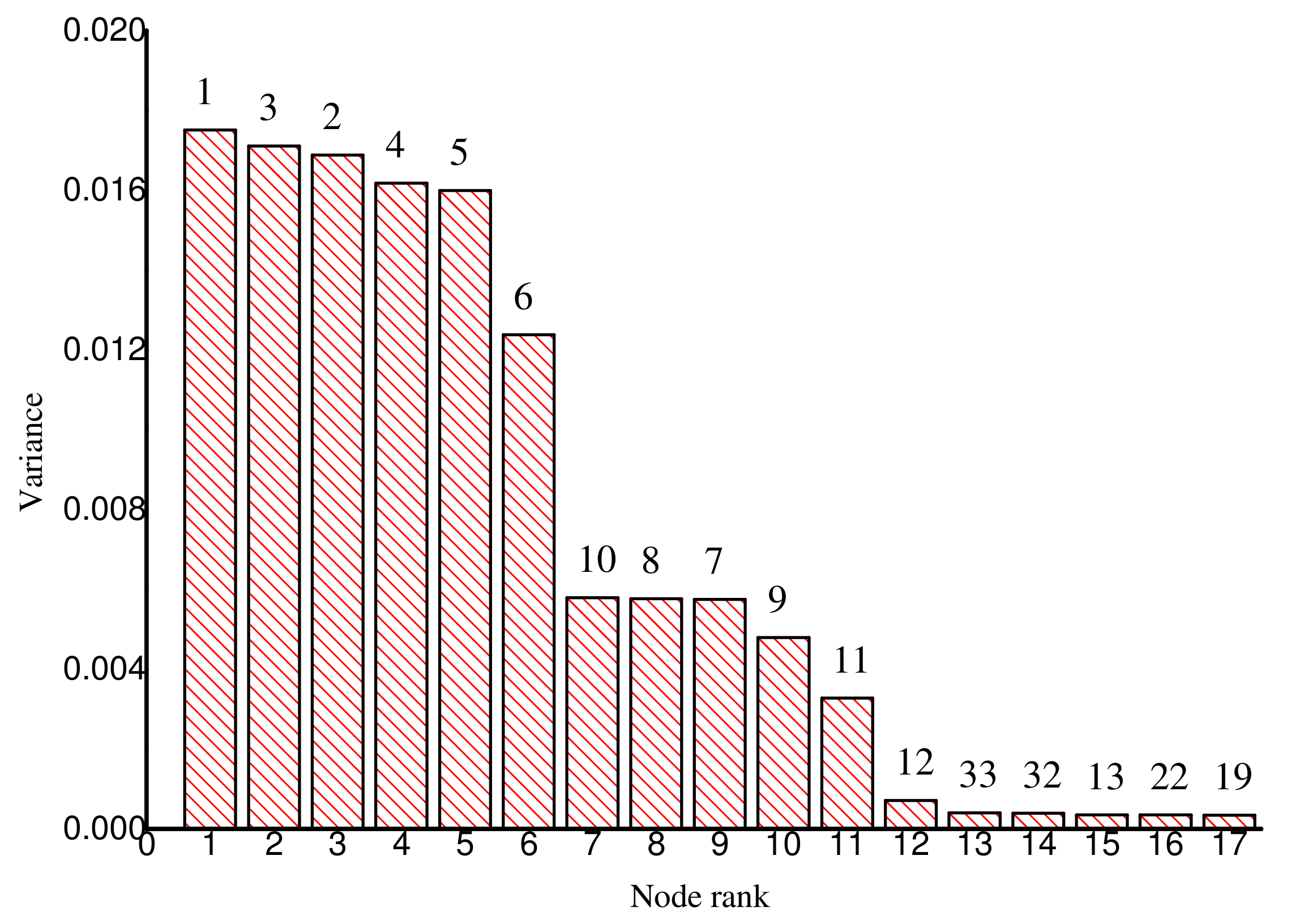
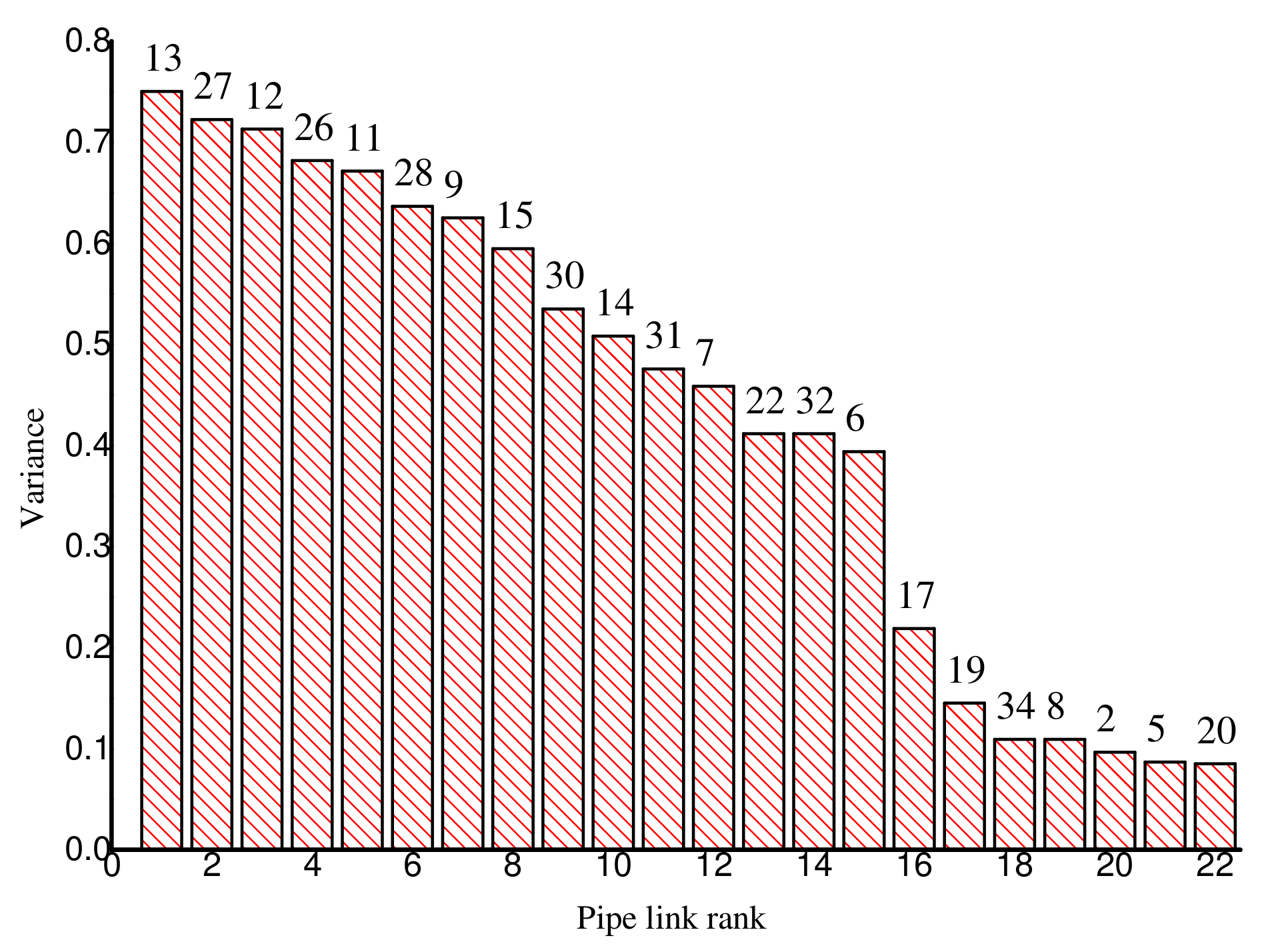
3.4. Selection of Sensor Placement Locations
4. Simulation Results and Discussion
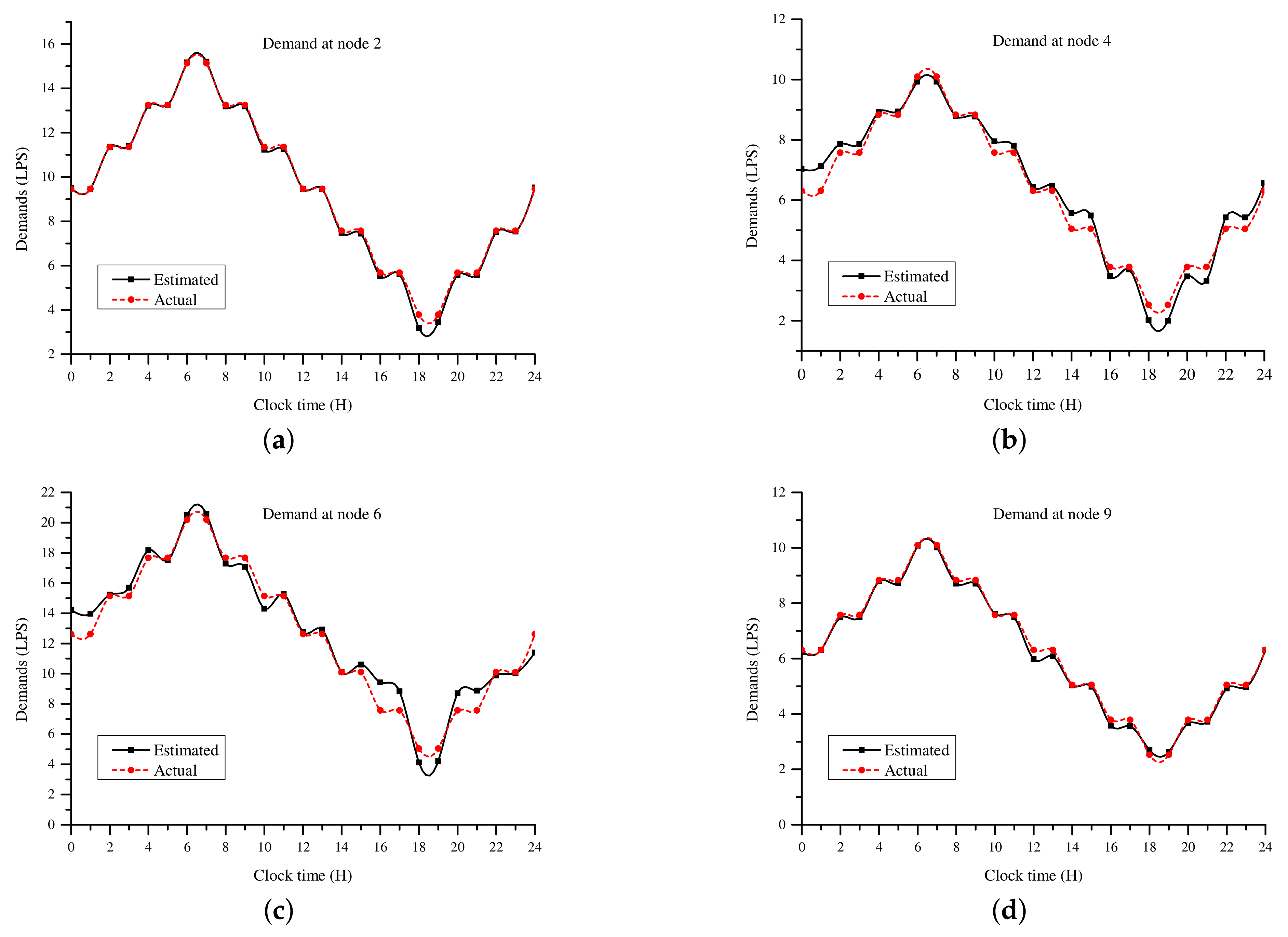
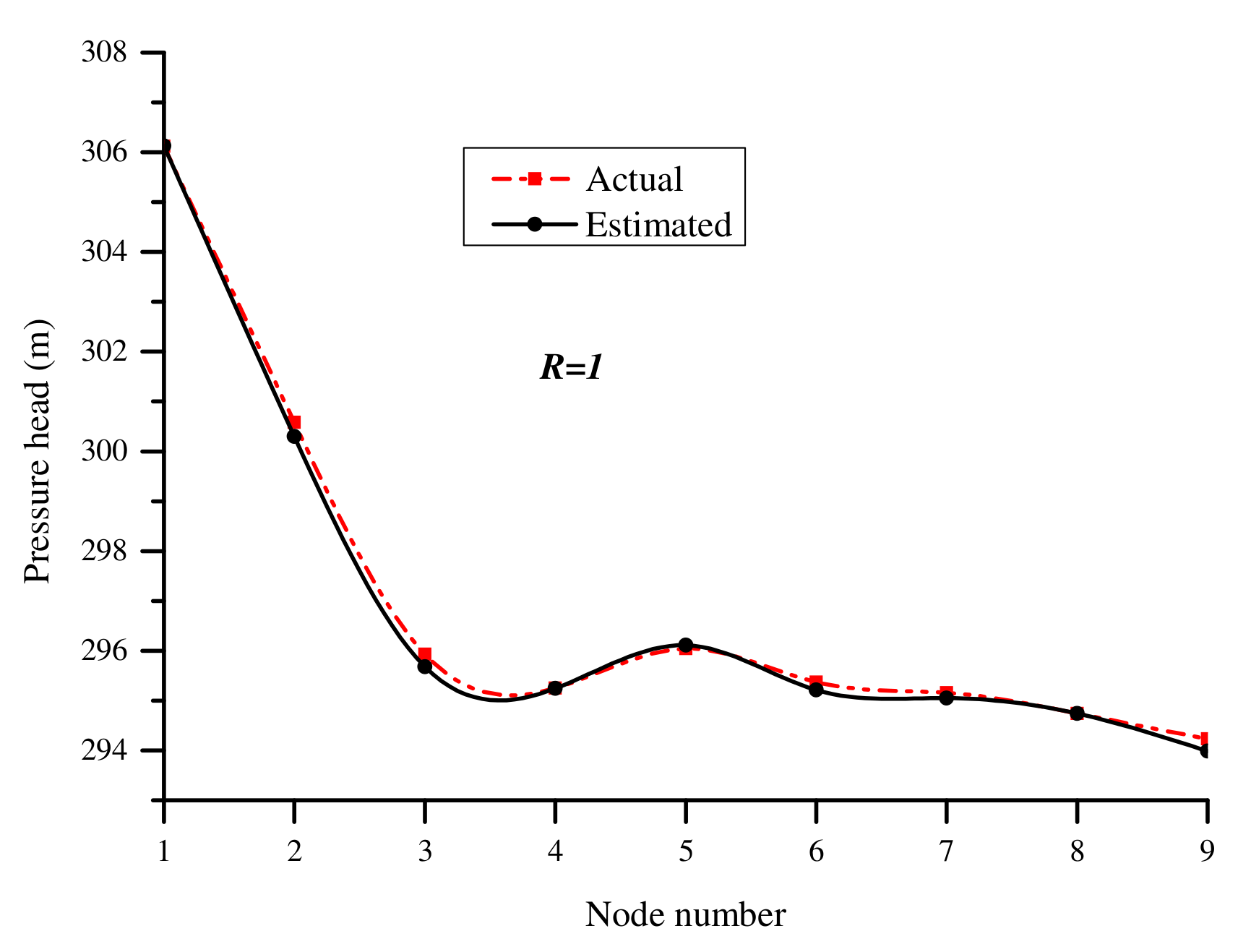
4.1. Case Study I: Estimation of Nodal Demands with Measurements from Pressure Head Sensors
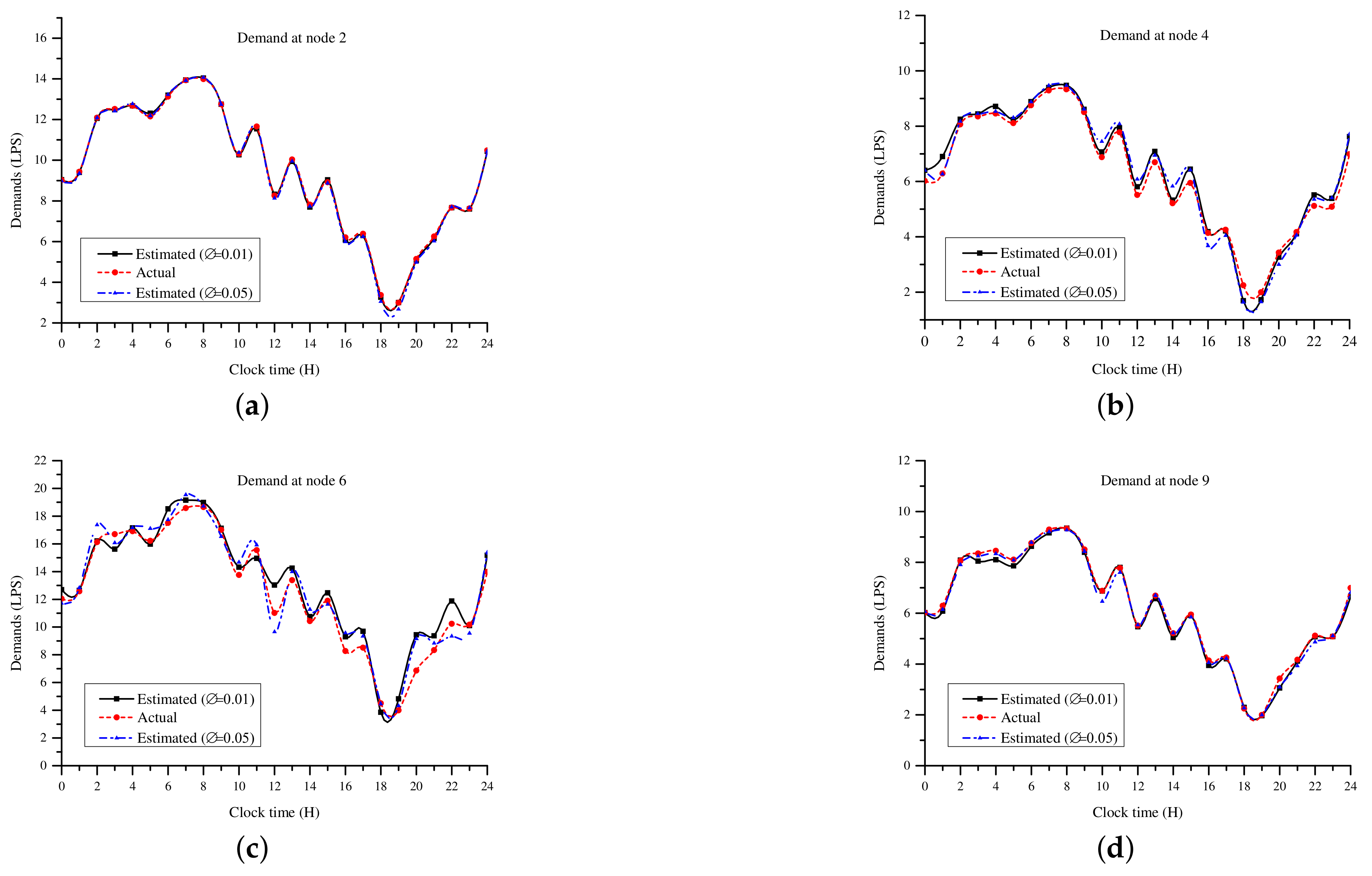
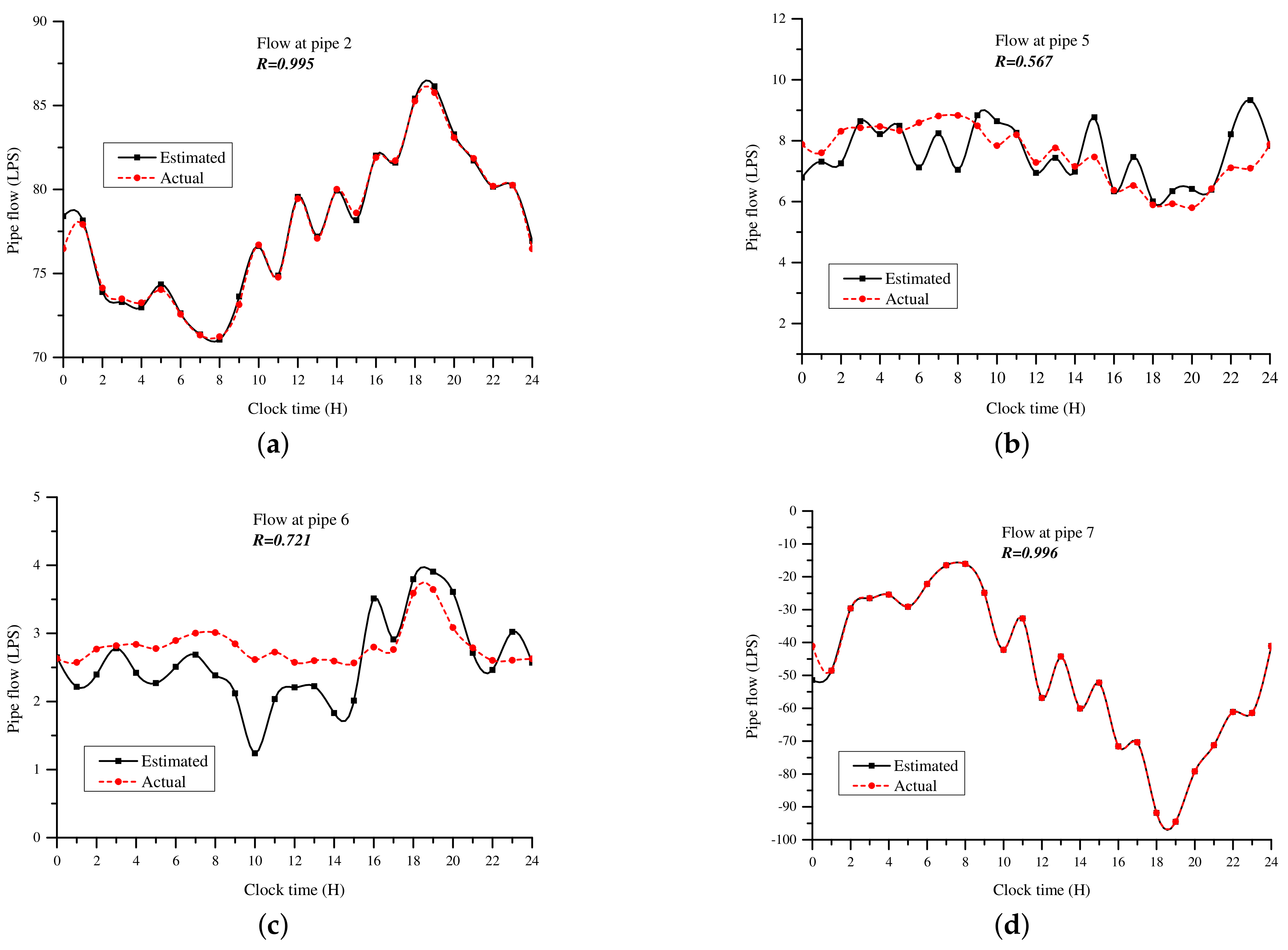
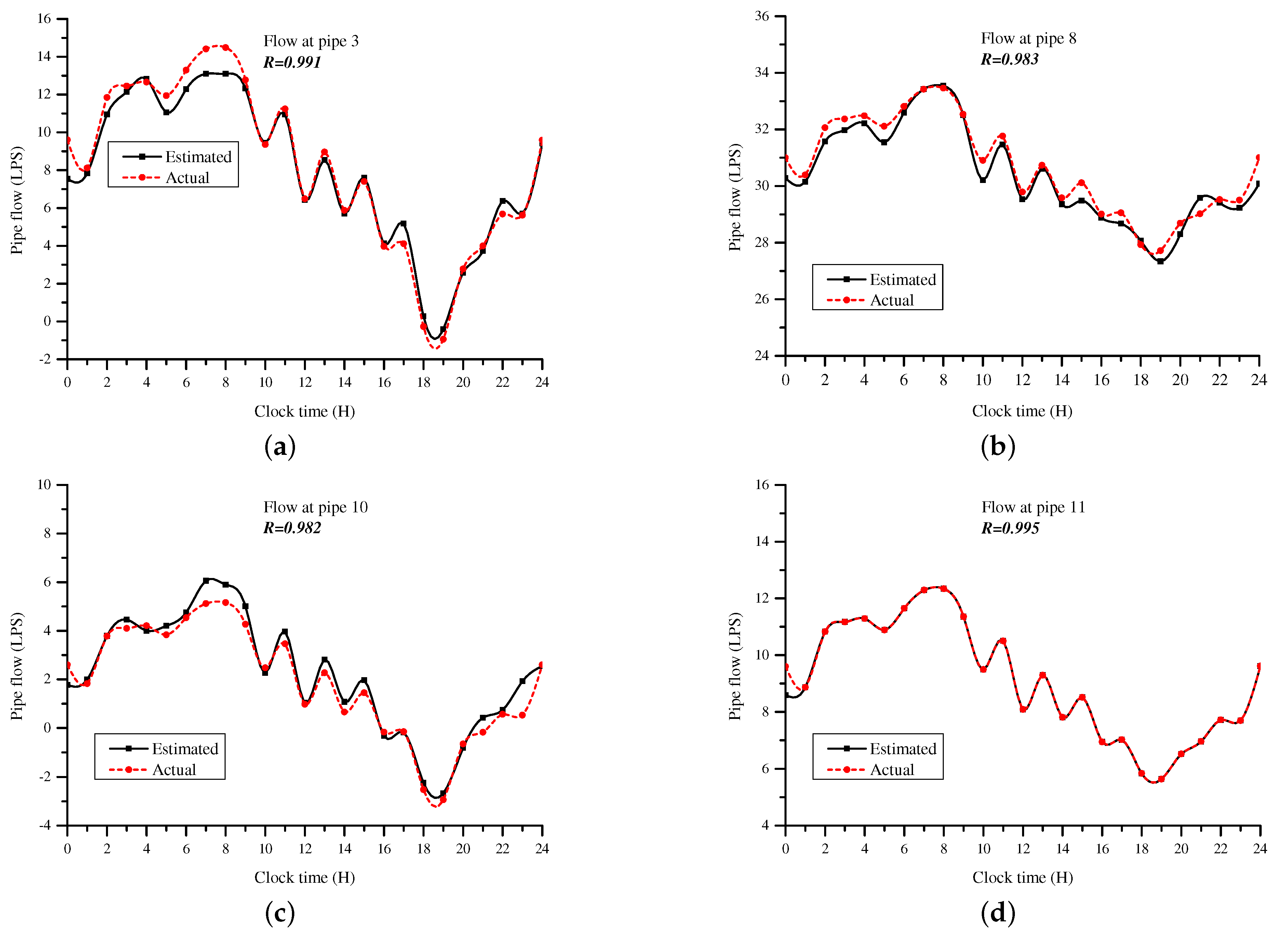
4.2. Case Study II: Estimation of Nodal Demands with Measurements from Flow Sensors and Pressure Sensors
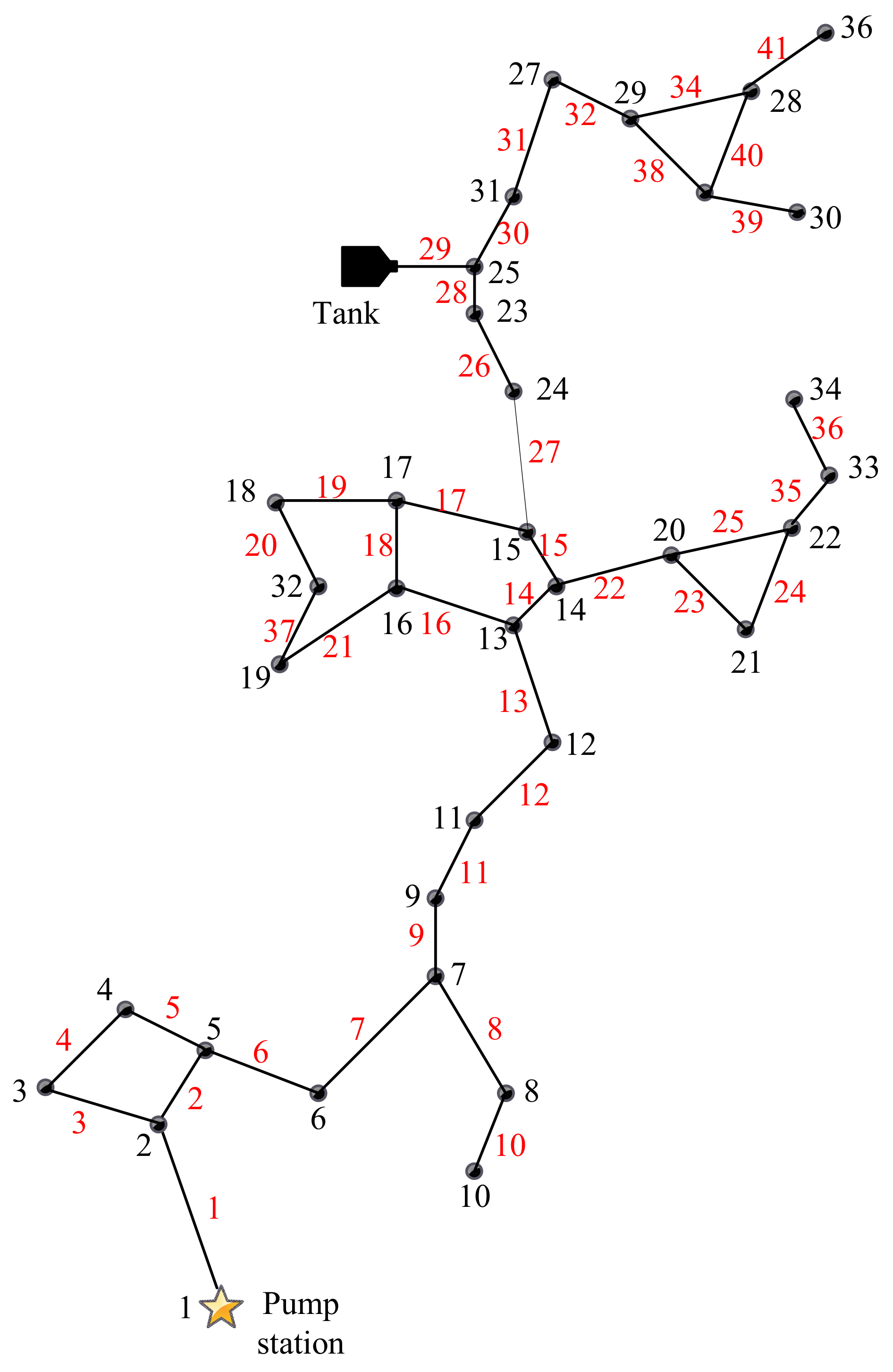
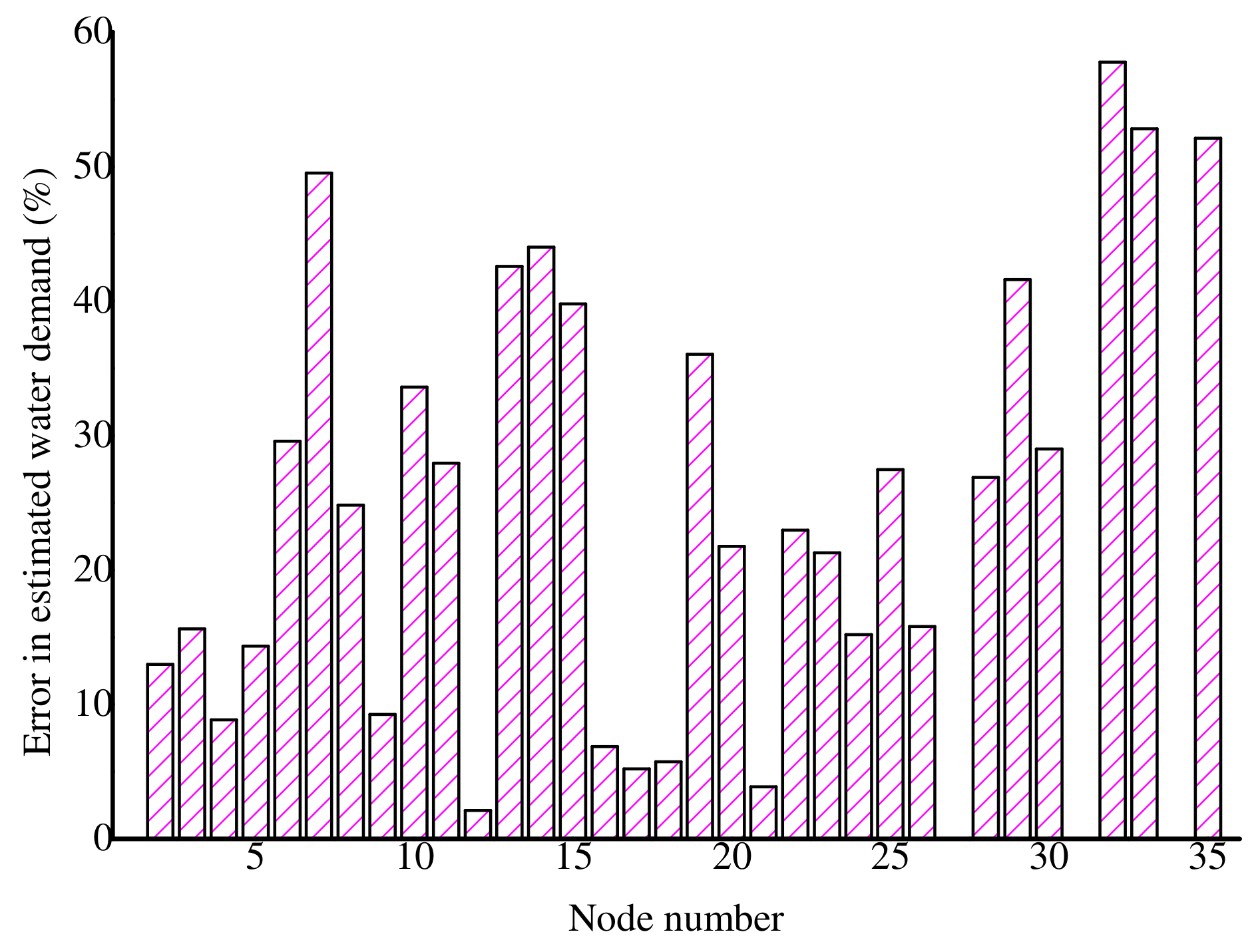
4.3. Case Study III: Estimation of Water Demand in a Larger Water Network
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Della Giustina, D.; Pau, M.; Pegoraro, P.A.; Ponci, F.; Sulis, S. Electrical distribution system state estimation: Measurement issues and challenges. IEEE Instrum. Meas. Mag. 2014, 17, 36–42. [Google Scholar] [CrossRef]
- Sarrate, R.; Blesa, J.; Nejjari, F.; Quevedo, J. Sensor placement for leak detection and location in water distribution networks. Water Sci. Technol. Water Supply 2014, 14, 795–803. [Google Scholar] [CrossRef]
- Eliades, D.; Kyriakou, M.; Polycarpou, M. Sensor Placement in Water Distribution Systems Using the S-PLACE Toolkit. Procedia Eng. 2014, 70, 602–611. [Google Scholar] [CrossRef]
- Pourali, M.; Mosleh, A. A functional sensor placement optimization method for power systems health monitoring. In Proceedings of the IEEE 2012 Industry Applications Society Annual Meeting (IAS), Las Vegas, NV, USA, 7–11 October 2012; pp. 1–10. [Google Scholar]
- Antunes, C.H.; Dolores, M. Sensor location in water distribution networks to detect contamination events—A multiobjective approach based on NSGA-II. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 1093–1099. [Google Scholar]
- Schal, S.; Bryson, L.S.; Ormsbee, L.E. A simplified procedure for sensor placement guidance for small utilities. Int. J. Crit. Infrastruct. 2016, 12, 195–212. [Google Scholar] [CrossRef]
- Jung, D.; Choi, Y.H.; Kim, J.H. Optimal Node Grouping for Water Distribution System Demand Estimation. Water 2016, 8, 160. [Google Scholar] [CrossRef]
- Qin, T.; Boccelli, D.L. Grouping Water-Demand Nodes by Similarity among Flow Paths in Water-Distribution Systems. J. Water Resour. Plan. Manag. 2017, 143, 04017033. [Google Scholar] [CrossRef]
- Preis, A.; Allen, M.; Whittle, A.J. On-line hydraulic modeling of a Water Distribution System in Singapore. In Proceedings of the Water Distribution Systems Analysis 2010, Tucson, AZ, USA, 12–15 September 2010; pp. 1336–1348. [Google Scholar]
- Ribeiro, L.; Sousa, J.; Marques, A.S.; Simões, N.E. Locating leaks with trustrank algorithm support. Water 2015, 7, 1378–1401. [Google Scholar] [CrossRef]
- Andersen, J.H.; Powell, R.S. Implicit state-estimation technique for water network monitoring. Urban Water 2000, 2, 123–130. [Google Scholar] [CrossRef]
- Bargiela, A. On-Line Monitoring of Water Distribution Networks. Ph.D. Thesis, Durham University, Durham, UK, 1984. [Google Scholar]
- Arsene, C.T.; Gabrys, B. Mixed simulation-state estimation of water distribution systems based on a least squares loop flows state estimator. Appl. Math. Model. 2014, 38, 599–619. [Google Scholar] [CrossRef]
- Jung, D.; Lansey, K. Water distribution system burst detection using a nonlinear Kalman filter. J. Water Resour. Plan. Manag. 2014, 141, 04014070. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, H.; Hou, D. Bayesian Approach for Joint Estimation of Demand and Roughness in Water Distribution Systems. J. Water Resour. Plan. Manag. 2017, 143, 04017034. [Google Scholar] [CrossRef]
- Hutton, C.J.; Kapelan, Z.; Vamvakeridou-Lyroudia, L.; Savic, D.A. Real-time demand estimation in water distrubtion systems under uncertainty. In Proceedings of the WDSA 2012: 14th Water Distribution Systems Analysis Conference, Adelaide, Australia, 24–27 September 2012; p. 1374. [Google Scholar]
- Do, N.C.; Simpson, A.R.; Deuerlein, J.W.; Piller, O. Calibration of Water Demand Multipliers in Water Distribution Systems Using Genetic Algorithms. J. Water Resour. Plan. Manag. 2016, 142, 04016044. [Google Scholar] [CrossRef]
- Preis, A.; Whittle, A.J.; Ostfeld, A.; Perelman, L. Efficient hydraulic state estimation technique using reduced models of urban water networks. J. Water Resour. Plan. Manag. 2010, 137, 343–351. [Google Scholar] [CrossRef]
- Sanz, G.; Pérez, R. Sensitivity analysis for sampling design and demand calibration in water distribution networks using the singular value decomposition. J. Water Resour. Plan. Manag. 2015, 141, 04015020. [Google Scholar] [CrossRef]
- Davidson, J.; Bouchart, F.C. Adjusting nodal demands in SCADA constrained real-time water distribution network models. J. Hydraul. Eng. 2006, 132, 102–110. [Google Scholar] [CrossRef]
- Rossman, L. Epanet 2: Users Manual; U.S. Environmental Protection Agency, Office of Research and Development, National Risk Management Research Laboratory: Washington, DC, USA, 2000.
- Kang, D.; Lansey, K. Real-time demand estimation and confidence limit analysis for water distribution systems. J. Hydraul. Eng. 2009, 135, 825–837. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Rossman, L.A. The EPANET programmer’s toolkit for analysis of water distribution systems. In WRPMD’99: Preparing for the 21st Century; American Society of Civil Engineers: New York, NY, USA, 1999; pp. 1–10. [Google Scholar]
- Letting, L.; Hamam, Y.; Adnan, A.M. An Interface for Coupling Optimization Algorithms With EPANET in Discrete Event Simulation Platforms. In Proceedings of the IEEE 15th International Conference of Industrial Informatics, Emden, Germany, 24–26 July 2017. [Google Scholar]
- Pudar, R.S.; Liggett, J.A. Leaks in pipe networks. J. Hydraul. Eng. 1992, 118, 1031–1046. [Google Scholar] [CrossRef]
- Pérez, R.; Puig, V.; Pascual, J.; Quevedo, J.; Landeros, E.; Peralta, A. Methodology for leakage isolation using pressure sensitivity analysis in water distribution networks. Control Eng. Pract. 2011, 19, 1157–1167. [Google Scholar] [CrossRef]
- Casillas, M.V.; Puig, V.; Garza-Castanón, L.E.; Rosich, A. Optimal sensor placement for leak location in water distribution networks using genetic algorithms. Sensors 2013, 13, 14984–15005. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Population (P) | 50 |
| Number of iterations (N) | 100 |
| Inertia factor () | 0.5, 0.05 |
| Social rate () | 0.9 |
| Cognitive rate () | 2.5 |
| Node | Actual | Estimated | % Error |
|---|---|---|---|
| 2 | 9.46 | 9.44 | 0.2 |
| 3 | 9.46 | 8.24 | 12.9 |
| 4 | 6.31 | 6.49 | 2.7 |
| 5 | 9.46 | 9.55 | 0.1 |
| 6 | 12.62 | 13.40 | 6.2 |
| 7 | 9.46 | 8.58 | 9.3 |
| 8 | 6.31 | 6.35 | 0.6 |
| 9 | 6.31 | 6.17 | 2.2 |
| Node | Actual | Estimated (PSO) | Estimated (GA) | % Error (PSO) | % Error (GA) |
|---|---|---|---|---|---|
| 2 | 150 | 149.60 | 118.67 | 0.2 | 20.9 |
| 3 | 150 | 130.59 | 131.45 | 12.9 | 12.4 |
| 4 | 100 | 102.85 | 93.15 | 2.7 | 6.9 |
| 5 | 150 | 151.35 | 164.15 | 0.1 | 9.43 |
| 6 | 200/(150) | 212.36 | 140.58 | 6.2 | 6.3 |
| 7 | 150/(300) | 135.97 | (327.15) | 9.3 | 9.1 |
| 8 | 100/(50) | 100.63 | (50.34) | 0.6 | 0.7 |
| 9 | 100/(50) | 97.78 | (35.90) | 2.2 | 28.2 |
| Node | Actual | Estimated ( = 0.05) | % Error | Estimated ( = 0.01) | % Error |
|---|---|---|---|---|---|
| 2 | 9.39 | 9.33 | 0.3 | 9.37 | 0.2 |
| 3 | 9.39 | 8.58 | 8.6 | 8.75 | 6.8 |
| 4 | 6.26 | 6.39 | 2.1 | 6.43 | 2.7 |
| 5 | 9.39 | 9.75 | 3.8 | 9.57 | 1.9 |
| 6 | 12.53 | 12.87 | 2.7 | 13.10 | 4.5 |
| 7 | 9.39 | 8.65 | 7.9 | 8.57 | 8.7 |
| 8 | 6.26 | 6.22 | 0.6 | 6.30 | 0.6 |
| 9 | 6.26 | 6.17 | 1.4 | 6.15 | 1.7 |
| Node | Actual | Estimated | % Error |
|---|---|---|---|
| 2 | 9.39 | 9.59 | 2.1 |
| 3 | 9.39 | 9.42 | 0.3 |
| 4 | 6.26 | 5.77 | 7.9 |
| 5 | 9.39 | 8.78 | 6.5 |
| 6 | 12.53 | 13.08 | 4.4 |
| 7 | 9.39 | 9.75 | 3.8 |
| 8 | 6.26 | 6.50 | 3.7 |
| 9 | 6.26 | 5.99 | 4.4 |
| Pipe | Actual | Estimated | % Error |
|---|---|---|---|
| 1 | 117.75 | 117.73 | 0.0 |
| 2 | 77.62 | 77.74 | 0.2 |
| 3 | 8.22 | 7.95 | 3.2 |
| 4 | 12.11 | 12.55 | 3.6 |
| 5 | 7.54 | 7.57 | 0.5 |
| 6 | 2.81 | 2.58 | 8.3 |
| 7 | −48.44 | −48.85 | 0.9 |
| 8 | 30.68 | 30.40 | 0.9 |
| 9 | 11.52 | 11.52 | 0.0 |
| 10 | 1.91 | 2.18 | 13.9 |
| 11 | 9.12 | 9.07 | 0.5 |
| 12 | 3.49 | 3.41 | 2.2 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Letting, L.K.; Hamam, Y.; Abu-Mahfouz, A.M. Estimation of Water Demand in Water Distribution Systems Using Particle Swarm Optimization. Water 2017, 9, 593. https://doi.org/10.3390/w9080593
Letting LK, Hamam Y, Abu-Mahfouz AM. Estimation of Water Demand in Water Distribution Systems Using Particle Swarm Optimization. Water. 2017; 9(8):593. https://doi.org/10.3390/w9080593
Chicago/Turabian StyleLetting, Lawrence K., Yskandar Hamam, and Adnan M. Abu-Mahfouz. 2017. "Estimation of Water Demand in Water Distribution Systems Using Particle Swarm Optimization" Water 9, no. 8: 593. https://doi.org/10.3390/w9080593
APA StyleLetting, L. K., Hamam, Y., & Abu-Mahfouz, A. M. (2017). Estimation of Water Demand in Water Distribution Systems Using Particle Swarm Optimization. Water, 9(8), 593. https://doi.org/10.3390/w9080593