1. Introduction
Subsea pipelines, serving as critical infrastructures connecting onshore terminals to offshore oil production platforms, play a vital role in transporting oil and gas resources and are often referred to as the lifelines of offshore energy transportation. Free spans usually occur due to local scour around subsea pipelines and the hydrodynamic forces acting on the free spans are crucial for the in situ stability (DNV [
1]) and long-term operational safety of the pipelines (DNV [
2]).
Under current conditions, the governing parameters for the hydrodynamic forces on a spanning pipeline are the gap ratio and the Reynolds number. The gap ratio is defined as
e/
D, where
e is the distance from the lower surface of the pipeline to the seabed, and
D is the pipeline diameter. Although the development process of the local scour is three-dimensional, the scour hole is regarded as two-dimensional, and the hydrodynamic forces are usually deemed uniform along the span in engineering designs, as demonstrated by Liang et al. [
3]. When the local scour reaches an equilibrium state, the gap ratio is approximately 1.0. The Reynolds number is defined as
Re =
u0D/
υ, where
u0 is the free stream velocity outside the boundary layer of the incoming flow, and
υ is the water kinematic viscosity. The hydrodynamic forces acting on a pipeline can be divided into the drag force
FD and the lift force
FL, and they can be further quantified as the sum of the time-mean value and the r.m.s value, respectively. The force coefficients corresponding to the time-mean and r.m.s. values are written as
CD,
CDrms for the drag force and
CL,
CLrms for the lift force.
Kiya [
4] and Roshko et al. [
5] conducted physical experiments to study the effect of
e/
D on the time-mean drag force coefficient
CD when
Re were in the range of 1 × 10
4~4 × 10
4 and equal to 2 × 10
4, respectively. Kiya’s [
4] results show that the
CD increases with the increase in the
e/
D until it remains constant after
e/
D increases to a critical value of about 0.4~0.5. However, Roshko’s results [
5] indicate that the critical value of the gap ratio beyond which the drag force coefficient remains constant is influenced by the incoming flow boundary layer thickness
δ. Further, Lei et al. [
6] studied the effect of the
δ/
D and
e/
D on the hydrodynamic coefficients of a circular cylinder via physical experiments, with
Re ranging from 1.30 × 10
4 to 1.45 × 10
4. By laying round rods close to the seabed at the far end of the incoming flow, Lei et al. [
6] altered the height of the seabed roughness and yielded different thicknesses of the incoming flow boundary layer (0.14 ≤
δ/
D ≤ 2.89). Their experimental results show that
CD increases with the increase in
e/
D when
e/
D ≤ 0.6; when
e/
D > 0.6,
CD almost remains constant. However,
CD was demonstrated to be affected by the ratio of
δ/
D. It should be noted that in the research work of Lei et al. [
6], the force coefficients are normalized with
u0. The experiments conducted by Zdrakovick [
7] also demonstrate that the force coefficients are variant with
δ/
D. Most recently, Teng et al. [
8] investigated the effect of the velocity gradient in the boundary layer on the time-mean force coefficients. Their results show that the force coefficients deviate significantly when different boundary layer properties are introduced.
In addition to physical experiments, many researchers have also studied the influence of different parameters on the hydrodynamic coefficients of circular cylinders through numerical simulations. Brørs [
9] established a numerical model for the forces acting on pipelines that can consider the influence of local scouring topography by using the Reynolds-averaged N–S equations combined with the
k-
ε turbulence closure model. The relevant numerical calculation results show that when
e/
D = 1.0 and
Re = 1.5 × 10
4, the average values of the drag force and lift force coefficients calculated by using the two-dimensional numerical analysis model agree well with the experimental results. Kazeminezhad et al. [
10] used a numerical model similar to that of Brørs [
9] to obtain the hydrodynamic coefficients of the pipeline within the parameter ranges of
Re = 9500, 0 ≤
e/
D ≤ 2.0, and 0.3 ≤
δ/
D ≤ 3.0. The results show that when the boundary layer thickness is the same, the variation trends of the average drag force coefficient and the average lift force coefficient with the gap ratio are consistent with the results of physical experiments.
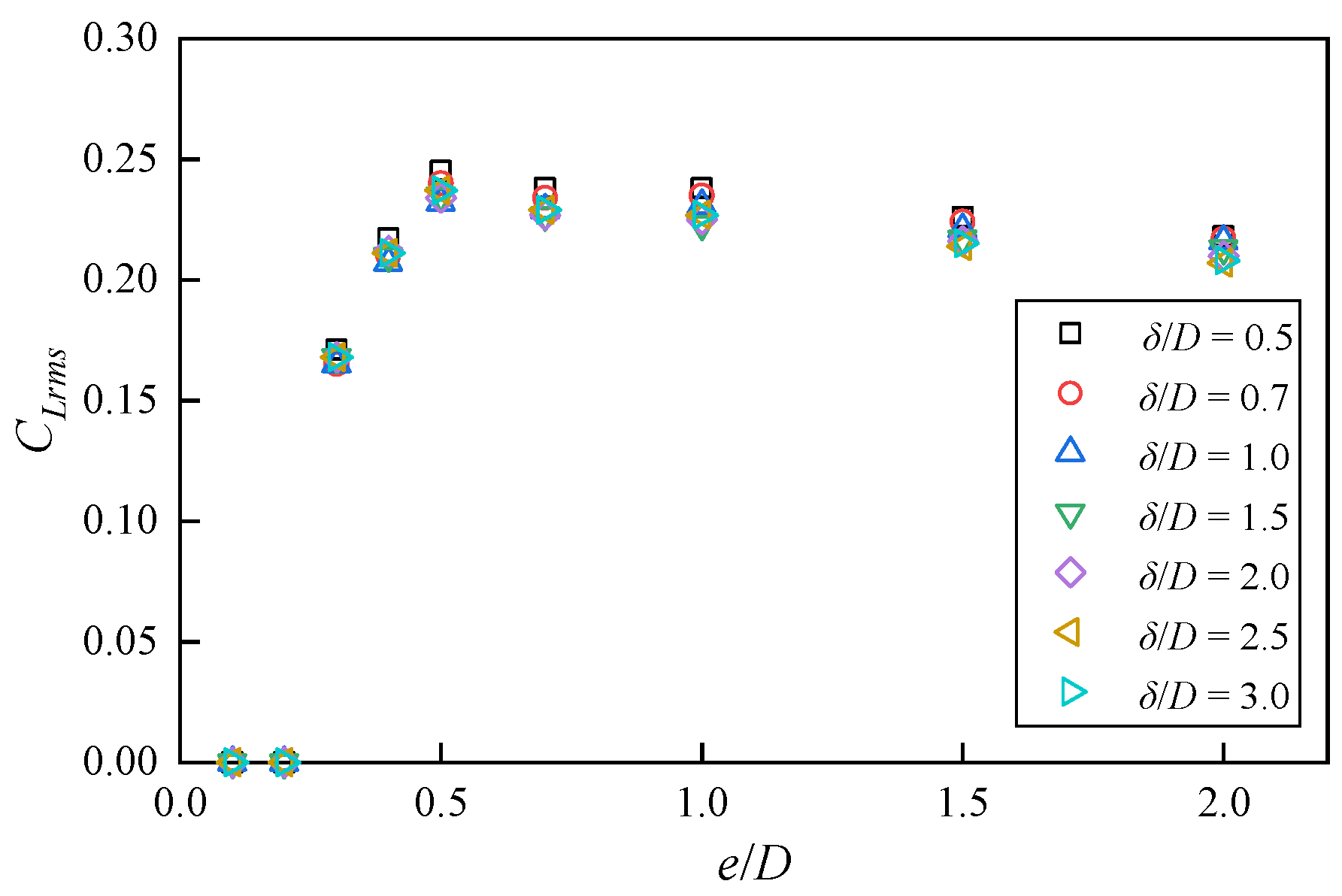
The r.m.s. force coefficients are related to vortex shedding in the wake of the pipeline. Lei et al. [
11] investigated the influence of the Reynolds number (
Re = 80~10
3) and the gap ratio (0.1
≤ e/D ≤ 3.0) on the flow structure around a pipeline and the forces acting on it by solving the two-dimensional Navier–Stokes (N–S) equations. Their results show that the critical gap ratio for the onset of vortex shedding is approximately 0.2. Ong et al. [
12] used the two-dimensional Reynolds-averaged N–S equations combined with the
k-
ε turbulence closure model to study the mechanism of vortex shedding from a near-wall circular cylinder when
Re = 1.31 × 10
4 and in the range of 0.1 ≤
e/
D ≤ 1.0. Their results show that the vortex structure is inhibited by the wall when the gap ratio
e/D ≤ 0.3. However, the effect of
δ/
D on
CDrms and
CLrms has not been well investigated.
All the above justifications suggest that an additional parameter noticeably affects the hydrodynamic forces, namely, the boundary layer thickness to diameter ratio δ/D. However, empirical methods for evaluating the force coefficients under the effect of δ/D have not been proposed. Therefore, this study takes the forces acting on the subsea suspended pipeline as the research object, focuses on analyzing the influence of the thickness of the incoming flow boundary layer and the pipeline gap ratio on the forces acting on the pipeline, and aims to establish an empirical prediction method for the hydrodynamic coefficients of the suspended pipeline under the action of unidirectional flow, so as to provide a scientific basis and technical reference for the safety design, operation, and maintenance of the pipeline.
2. Materials and Methods
The numerical simulations in this study were carried out using the open-source software OpenFOAM-10. The fluid flow control equations are the continuity equation and the Reynolds-averaged Navier–Stokes (N–S) equations for two-dimensional incompressible viscous fluids. In the Cartesian coordinate system, the governing equations are as follows:
Among them,
x1 =
x and
x2 =
y are the coordinate components in the Cartesian coordinate system,
ui is the
ith velocity component with respect to the coordinate
xi (
u1 =
u and
u2 =
v correspond to
x1 =
x and
x2 =
y, respectively),
t is the time,
ρ is the fluid density,
p is the pressure, and
ν is the kinematic viscosity of the fluid.
Sij = (∂
ui/∂
xj + ∂
uj/∂
xi)/2 represents the strain-rate tensor.
is the Reynolds stress, and its calculation formula is
In the above formula, k is the turbulent kinetic energy, and δij is the Kronecker operator.
The Reynolds stress term
makes the above-mentioned control equations unclosed. Therefore, a turbulence model needs to be introduced to close and solve the equations. In the present study, the SST
k −
ω two-equation turbulent model proposed by Menter [
13] and Menter et al. [
14] is employed. The corresponding control equations consist of the turbulent kinetic energy
k and the kinetic energy dissipation rate
ω, and their forms are as follows:
In the above formulae,
pk is the generation of turbulent kinetic energy,
υt is the turbulent eddy viscosity, and
F1 is the blending function. They can be expressed as follows:
In the formulas,
S = (2
SijSij)
1/2 is the invariant measure of the strain rate,
y+ is the dimensionless distance from the nearest grid to the wall surface, and the variables
F2 and
Dkω are expressed as
Based on the blending function
F1,
σk = F1σk1 + (1 −
F1)
σk2,
σω =
F1σω1 + (1 −
F1)
σω2,
α =
F1α1 + (1 −
F1)
α2, and
β =
F1β1 + (1 −
F1)
β2. The coefficients of the SST
k −
ω turbulent model used in Equations (4)–(10) are shown in
Table 1:
2.1. Numerical Calculation Model
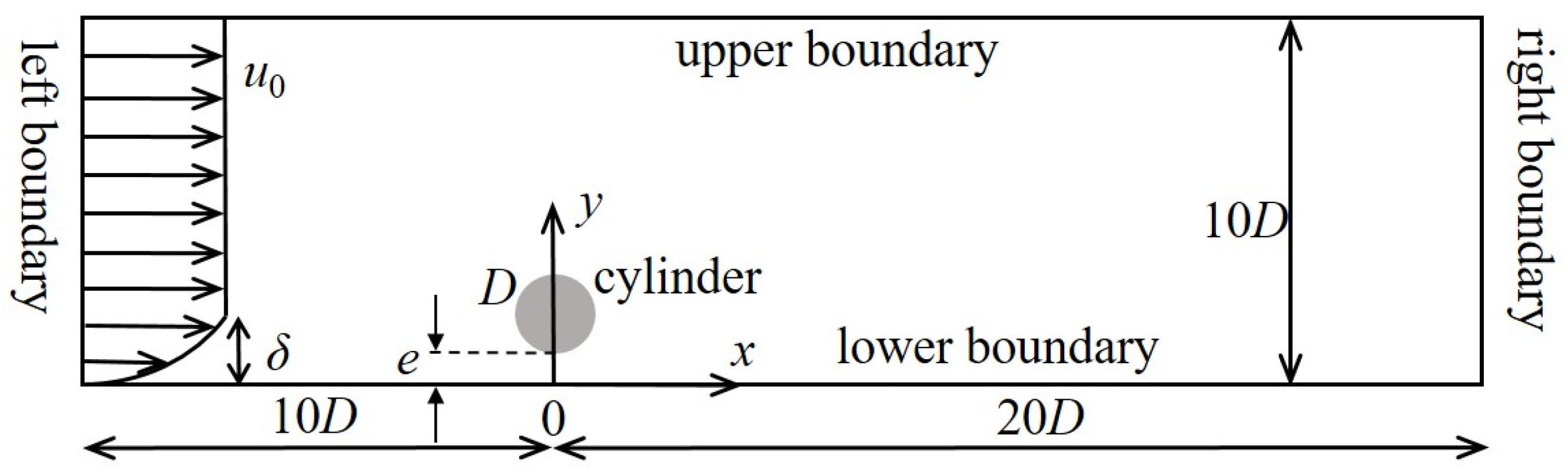
The computational domain of the two-dimensional force calculation model for a suspended pipeline under the action of unidirectional flow is presented in
Figure 1. The coordinate origin is set on the seabed and below the center of the pipeline. The pipeline center is located at a distance
e +
D/2 above the seabed, where
e is the height from the bottom of the pipeline to the seabed, with
D being the pipeline diameter. To ensure that the flow structure around the pipeline is not influenced by the boundaries shown in
Figure 1, the distance between the left boundary and the pipeline center is 10
D, while the corresponding distance is 20
D for the downstream.
The boundary conditions for the present numerical model are set as follows: For the left boundary, the boundary conditions are u = u(y), v = 0, ∂p/∂x = 0, ∂k/∂n = 0, ∂ω/∂n = 0. For the right boundary, they are ∂u/∂x = 0, ∂v/∂y = 0, p = 0, ∂k/∂n = 0, ∂ω/∂n = 0. The upper boundary is a slip boundary with u = u0, v = 0, ∂p/∂y = 0, ∂k/∂n = 0, ∂ω/∂n = 0. Both the lower boundary and the cylinder surface are non-slip boundaries. The boundary conditions are u = 0, v = 0, ∂p/∂n = 0, ω = 6υ/0.075Δ2. The boundary conditions for the turbulent kinetic energy k at the lower boundary and the cylinder surface are ∂k/∂n = 0 and k = 0, respectively. Here, ν is the kinematic viscosity of the fluid, Δ is the height of the first-layer grid from the cylinder surface, and n is the unit vector of the outer normal vector of the boundary.
To simulate the incoming flow conditions with different boundary-layer thicknesses at the inlet, within the boundary layer (
y ≤
δ), the specified velocity profile satisfies the logarithmic distribution law; outside the boundary layer (
y >
δ), the corresponding flow velocity is the free-stream velocity
u0. The velocity distribution formula is as follows:
In the formula, u(y) represents the horizontal flow velocity at the vertical coordinate y, u* represents the friction velocity, κ is the von Kármán constant, and κ = 0.41 is taken in the present study. zw represents the seabed roughness length, which reflects the roughness length of the seabed. For a sandy seabed, zw = d50/12 is employed, and d50 represents the median particle size of the sediment. For the subsequent numerical calculations of the present study, zw = 1 × 10−6 m is taken.
The calculation formulas of the forces and the corresponding coefficients are written as follows:
In the above formulas,
p represents the pressure,
τ0 is the shear stress along the surface of the pipeline, and
r0 is the radius of the pipeline, as shown in
Figure 2;
ρ represents the fluid density.
2.2. Grid Convergence Verification
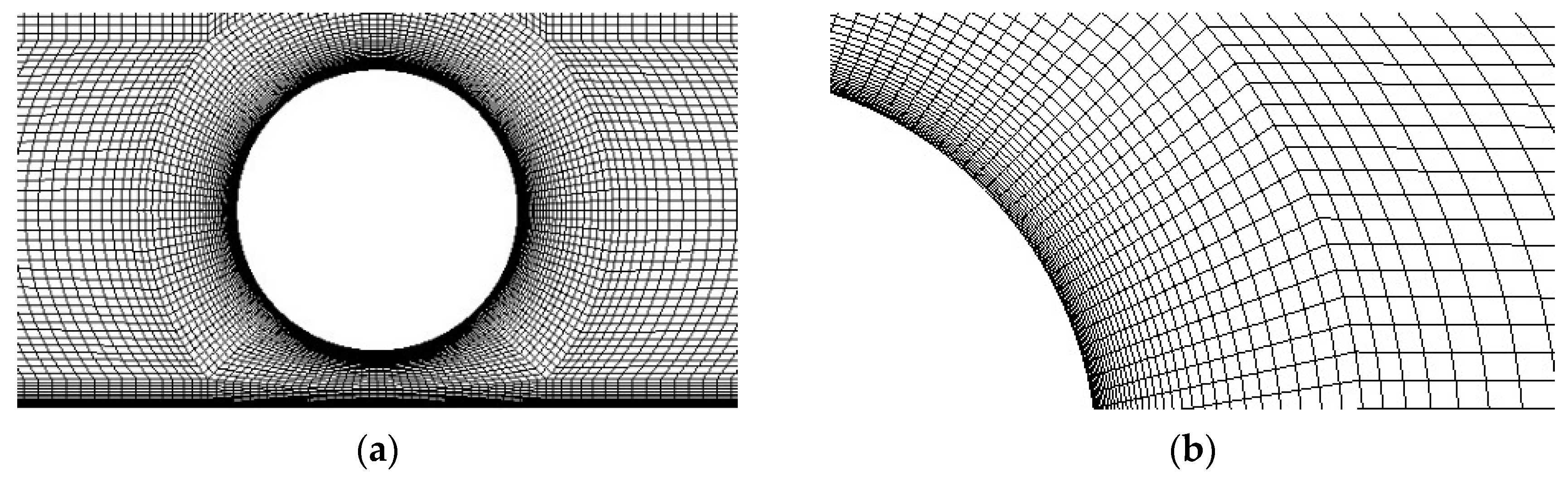
To guarantee the accuracy of the numerical model, the grid convergence is verified first before conducting the formal numerical simulations. The entire computational domain is discretized using four-node quadrilateral grids.
Figure 3a shows the grids divided near the entire pipeline. There are mainly two encryption measures: one is to change the number of circumferential nodes on the pipeline surface, and the other is to change the height of the first-layer grids on the pipeline surface and the seabed. A locally enlarged view of the grid discretization around the pipeline is presented in
Figure 3b.
Table 2 presents the grid information and verification results for the convergence verification of the pipeline surface nodes (G1~G5) and the height of the first-layer surface grids (G4, G6, G7, G8). In the present study, under the conditions of
Re = 1 × 10
4,
e/
D = 0.5, and
δ = 2
D, the average drag force coefficient
CDm and the average lift force coefficient
CLm are compared and verified. Here,
CDm and
CLm are obtained by taking the time-average of the values of
CD and
CL within 30 periods after they become stable. The results show that when the number of pipeline surface nodes is 160 and the height of the first-layer grid is 0.002
D, the grid meets the convergence requirements. Subsequent calculation work will be carried out according to this grid division method.
2.3. Verification of Time Step Convergence
In addition to verifying the convergence of the grid size, it is also necessary to verify the convergence of the time step. Equation (16) shows the method of dimensionless treatment for the time step:
Among them, Δ
t is the dimensional time step, and
u0 is the free stream velocity. Under the conditions of the Reynolds number
Re = 1 × 10
4, the gap ratio
e/
D = 0.5, and the boundary layer thickness
δ = 2
D, the convergence of the time steps Δ
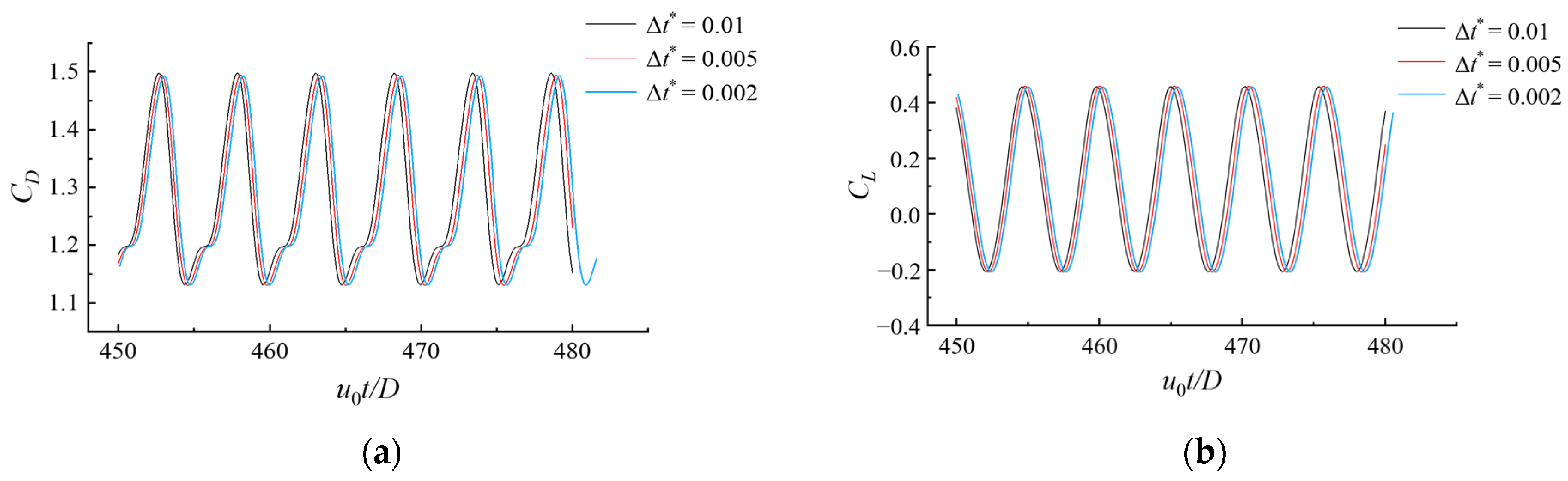
t* = 0.01, 0.005, and 0.002 is verified, and the corresponding numerical results are shown in
Figure 4. The oscillation of force coefficients observed in
Figure 4 is related to vortex shedding.
The above results indicate that when Δt* = 0.01, the drag force coefficient is slightly larger, and its frequency also changes over time. The calculation results using Δt* = 0.005 and Δt* = 0.002 are basically the same. Therefore, Δt* = 0.005 is selected for the subsequent numerical calculations in the present study.
Employing the established numerical model in the present study, the calculated average horizontal velocity, average drag force coefficient CDm, average lift force coefficient CLm, and root mean square value of the lift force coefficient CLrms are compared with the experimental and numerical simulation results obtained by previous studies to examine the accuracy of the present numerical model.
First, the average horizontal velocity around the pipeline calculated under the conditions of
Re = 9500,
e/
D = 0.2, and
e/
D = 0.3, and the boundary layer thickness
δ = 2
D is compared with the experimental results reported by Oner et al. [
15]. The comparison results are shown in
Figure 5, where the circles represent the experimental data of Oner et al. [
15], and the red solid line represents the present numerical results.
It is seen from
Figure 5 that, when the gap ratio
e/
D = 0.2, the present numerical results agree well with the experimental data reported by Oner et al. [
15]. When the gap ratio
e/
D = 0.3, the average horizontal velocity of the flow field in front of the pipeline is consistent with the experimental results. Although there is a certain error between the distribution of the average horizontal velocity behind the pipeline and the experimental results, this error is within an acceptable range. Therefore, this model can accurately simulate the flow field characteristics of the flow around a cylinder.
On the basis of the above comparison and verification, the hydrodynamic force on a suspended pipeline is further verified. The calculation conditions are as follows:
Re = 1 × 10
4,
e/
D = 0.5, and
δ = 2
D. The average drag force coefficient
CDm, average lift force coefficient
CLm, and root mean square value of the lift force coefficient
CLrms calculated by the present numerical model are compared with the experimental results of Jensen et al. [
16] and the numerical results of Kazeminezhad et al. [
10] and Tang et al [
17]. The comparison results are shown in
Figure 6.
As can be seen from
Figure 6, the calculation results of the numerical model in the present study are very close to the experimental results reported by Jensen et al. [
16] and the numerical results of Kazeminezhad et al. [
10] and Tang et al. [
17], which fully demonstrates that this model can accurately simulate the force-bearing characteristics of the flow around a cylinder under the action of unidirectional flow.
2.4. Summary of Simulations
The parameter settings for the numerical calculation are as follows: The Reynolds number Re = 1 × 104, the gap ratios e/D = 0.1, 0.2, 0.3, 0.4, 0.5, 0.7, 1.0, 1.5, and 2.0, and the thicknesses of the incoming flow boundary layer δ/D = 0.5, 0.7, 1.0, 1.5, 2.0, 2.5, and 3.0. In the numerical simulations, the effects of the boundary layer thickness δ/D and the gap ratio e/D on the hydrodynamic force acting on the pipeline and the vortex shedding frequency are analyzed in the next section.
4. Conclusions
By solving the Reynolds-averaged Navier–Stokes equations and combining them with the SST k-ω turbulence closure model, the hydrodynamic coefficients and the vortex shedding frequency of the suspended pipeline under the action of unidirectional flow have been studied. The influences of the gap ratio e/D, the boundary layer thickness to diameter ratio δ/D, and the Reynolds number Re on the forces have been analyzed. The following conclusions are drawn.
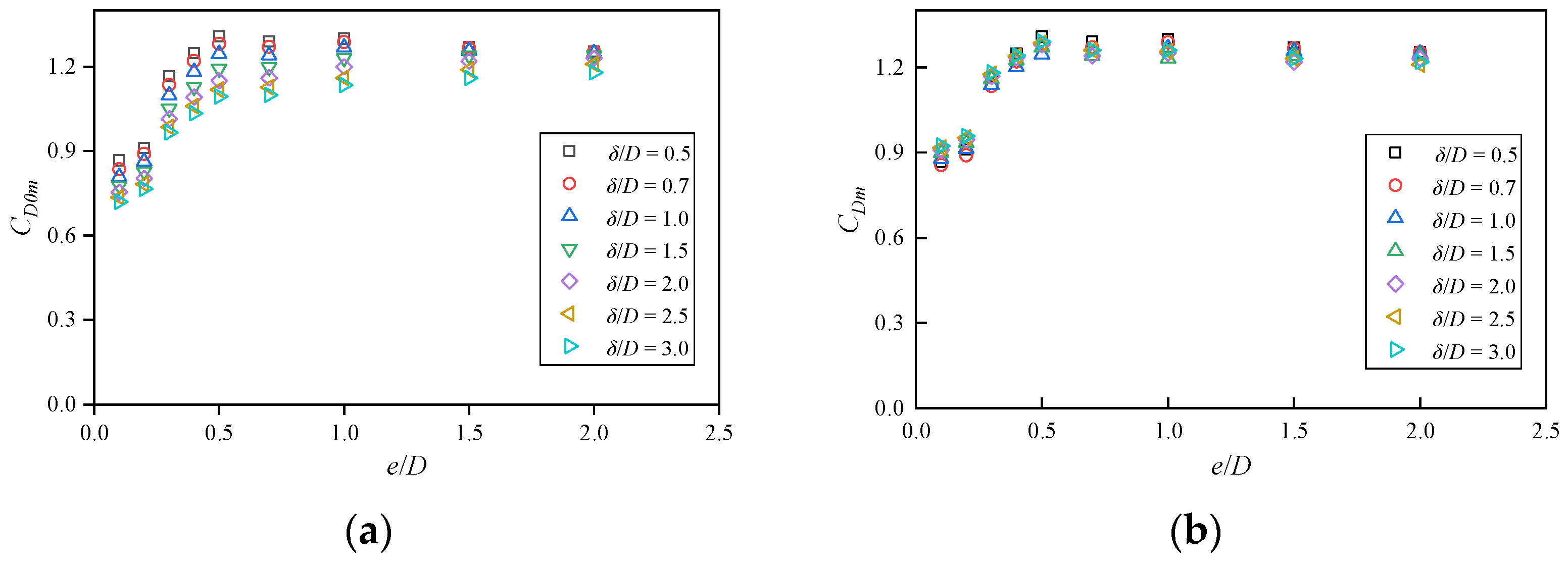
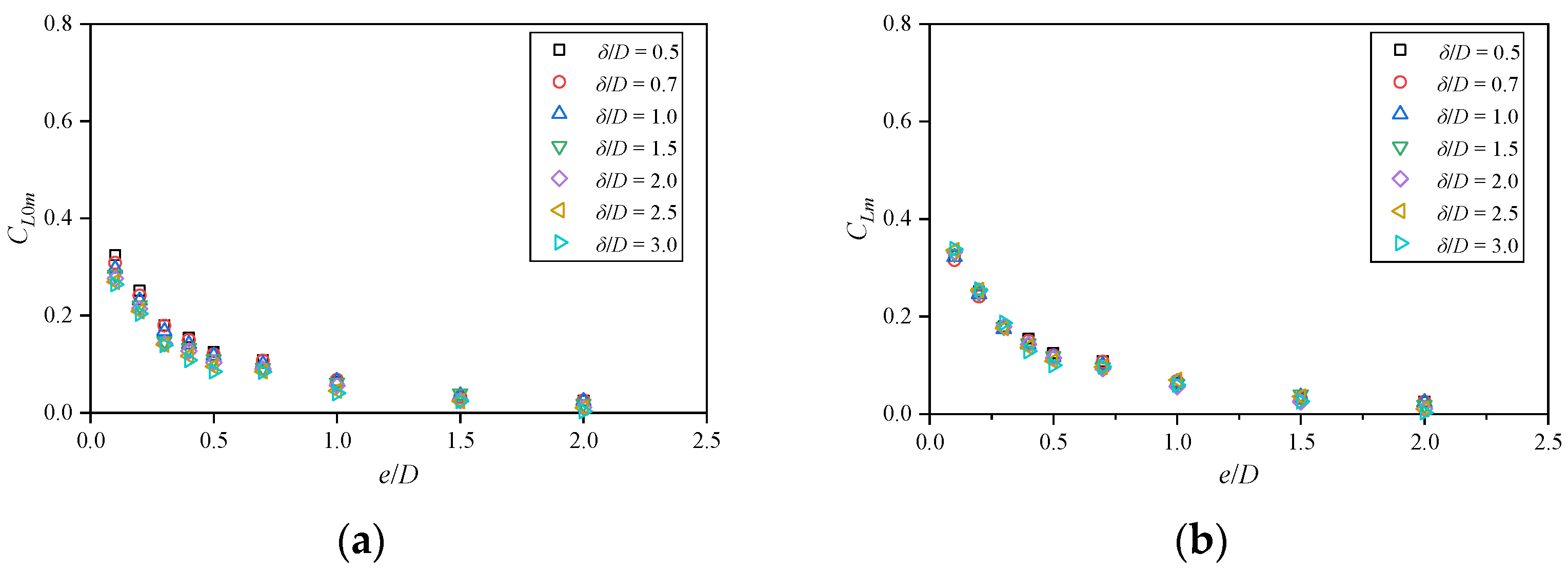
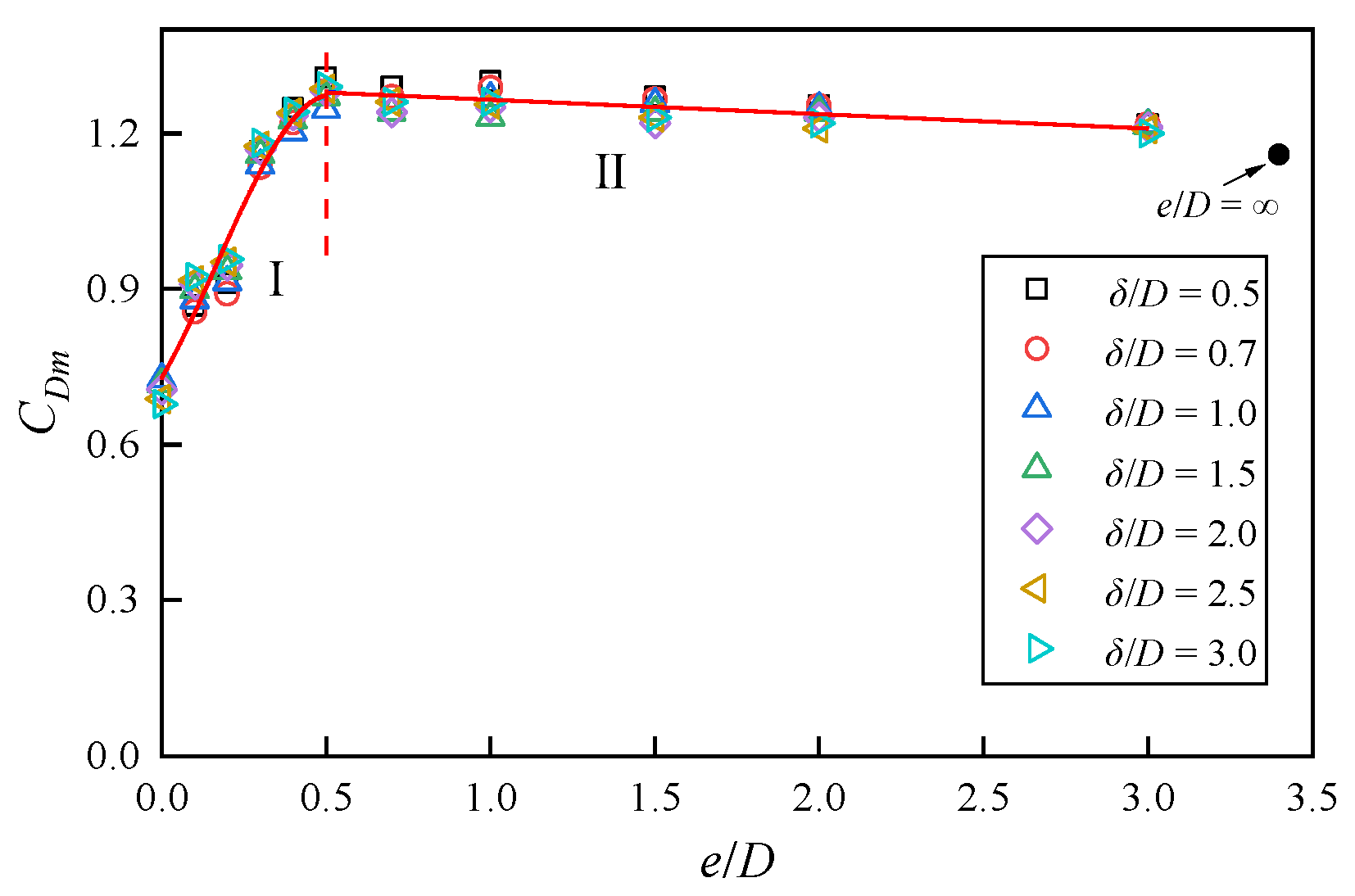
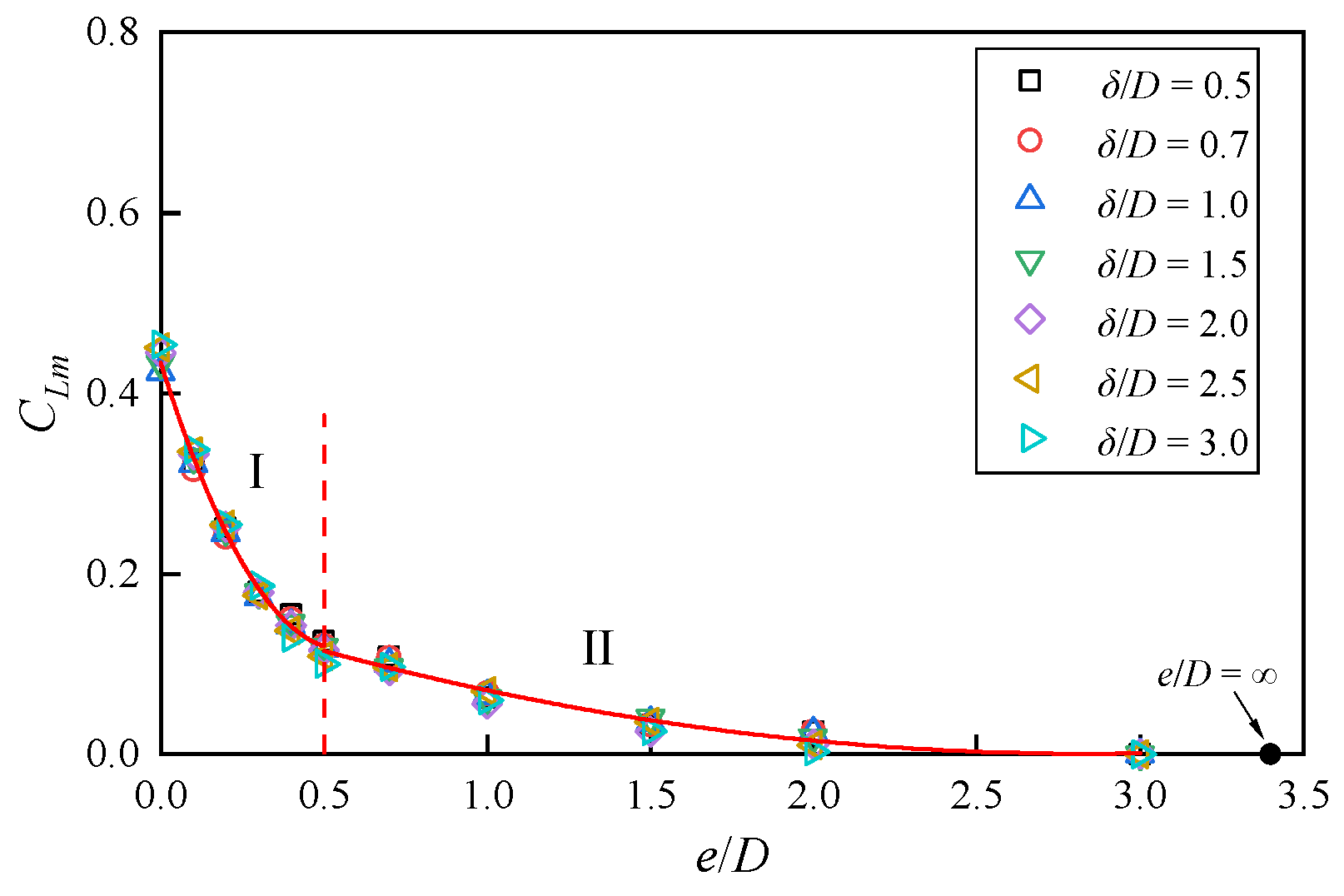
Normalizing the forces with the free stream velocity u0, the average drag force coefficient CDm increases with the increase in e/D for e/D ≤ 0.5 and remains constant for e/D > 0.5. The average lift force coefficient CLm gradually decreases with the increase in e/D and approaches zero when the e/D > 1.5. Both CDm and CLm decrease with the increase in the δ/D. Normalizing the forces with the flow velocity ua at the center of the pipeline, the influence of the δ/D on CDm and CLm can be approximately eliminated. Empirical prediction formulas between CDm, CLm, and e/D are proposed, which can be applied to engineering practices.
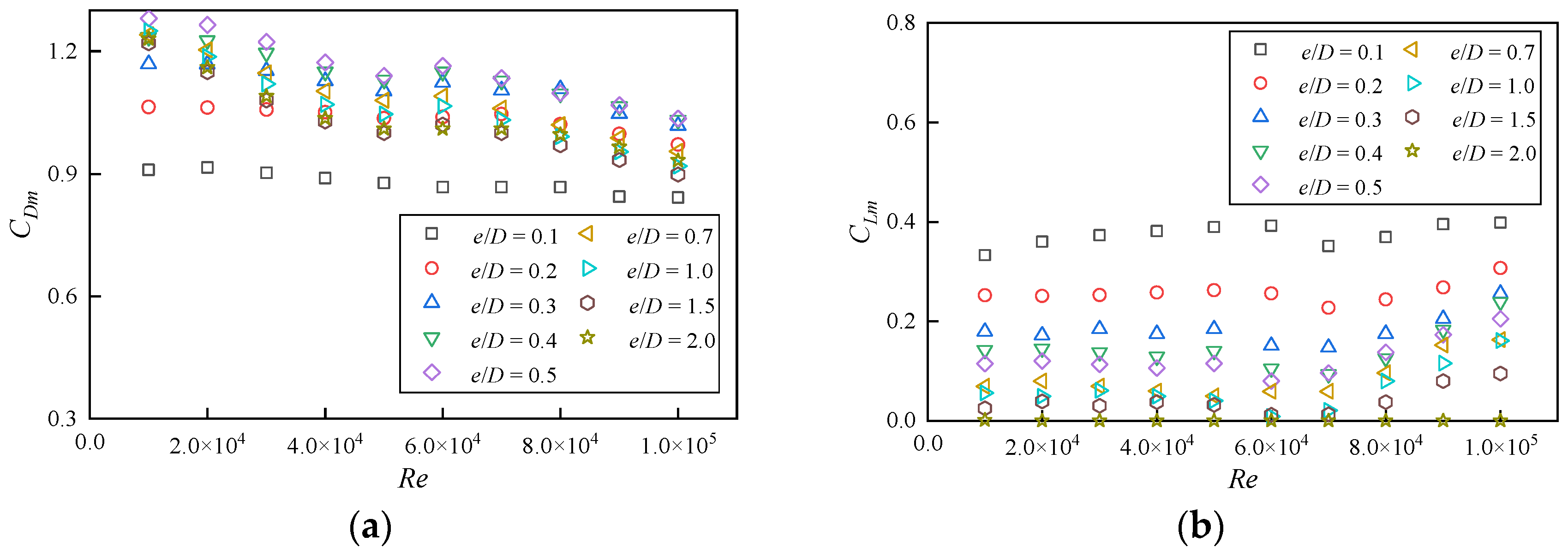
At Re = 104, the vortex shedding is prohibited for e/D < 0.24, where the Strouhal number St is zero. Vortex shedding starts at e/D = 0.24 and St increases with the increase in the e/D for 0.24 < e/D < 0.5. The effect of the wall proximity of vortex shedding is negligible for e/D > 0.5, where St remains approximately unchanged at around 0.2. When Re is in the range of 104 to 105, CDm decreases gradually with the increase in Re, whereas CLm increases gradually.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}