
Embankment Project Monitoring Using the Time-Lapse Transient Electromagnetic Method: Numerical Simulation and Field Applications



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
2.1. Time-Lapse TEM
2.2. Inversion Theory of Time-Lapse TEM
3. Numerical Experiment
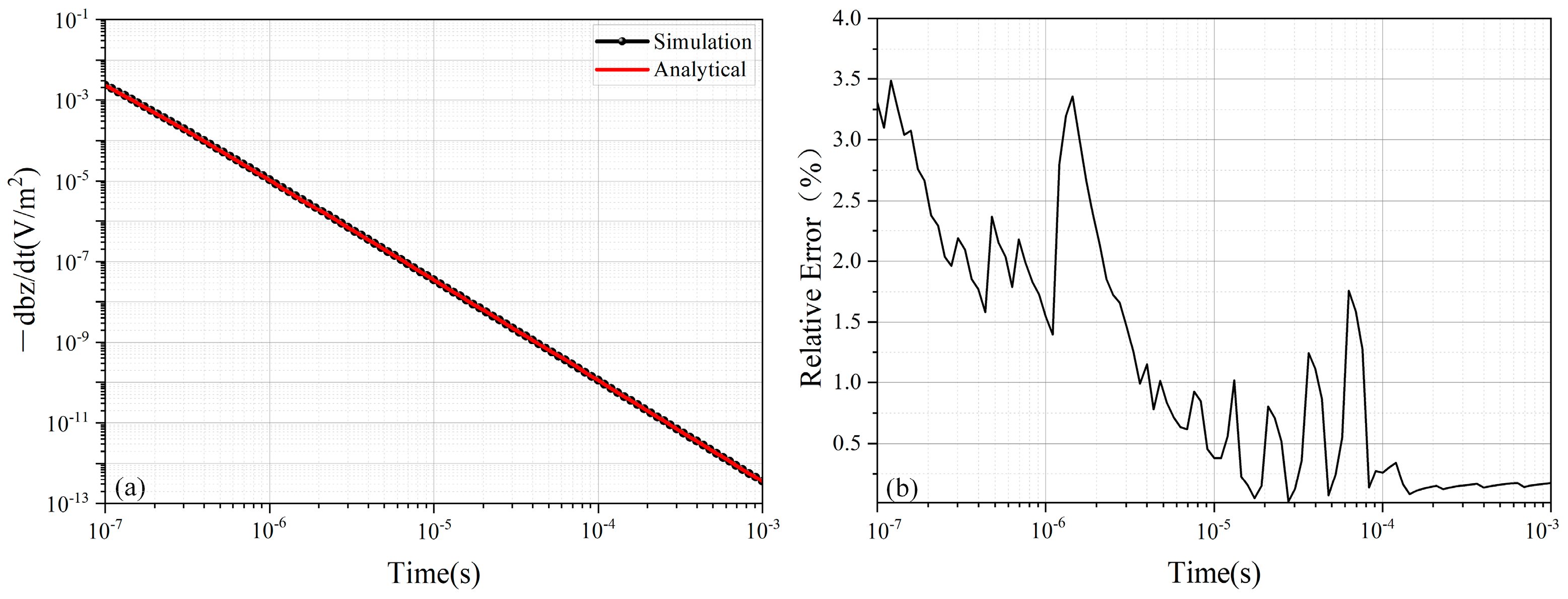
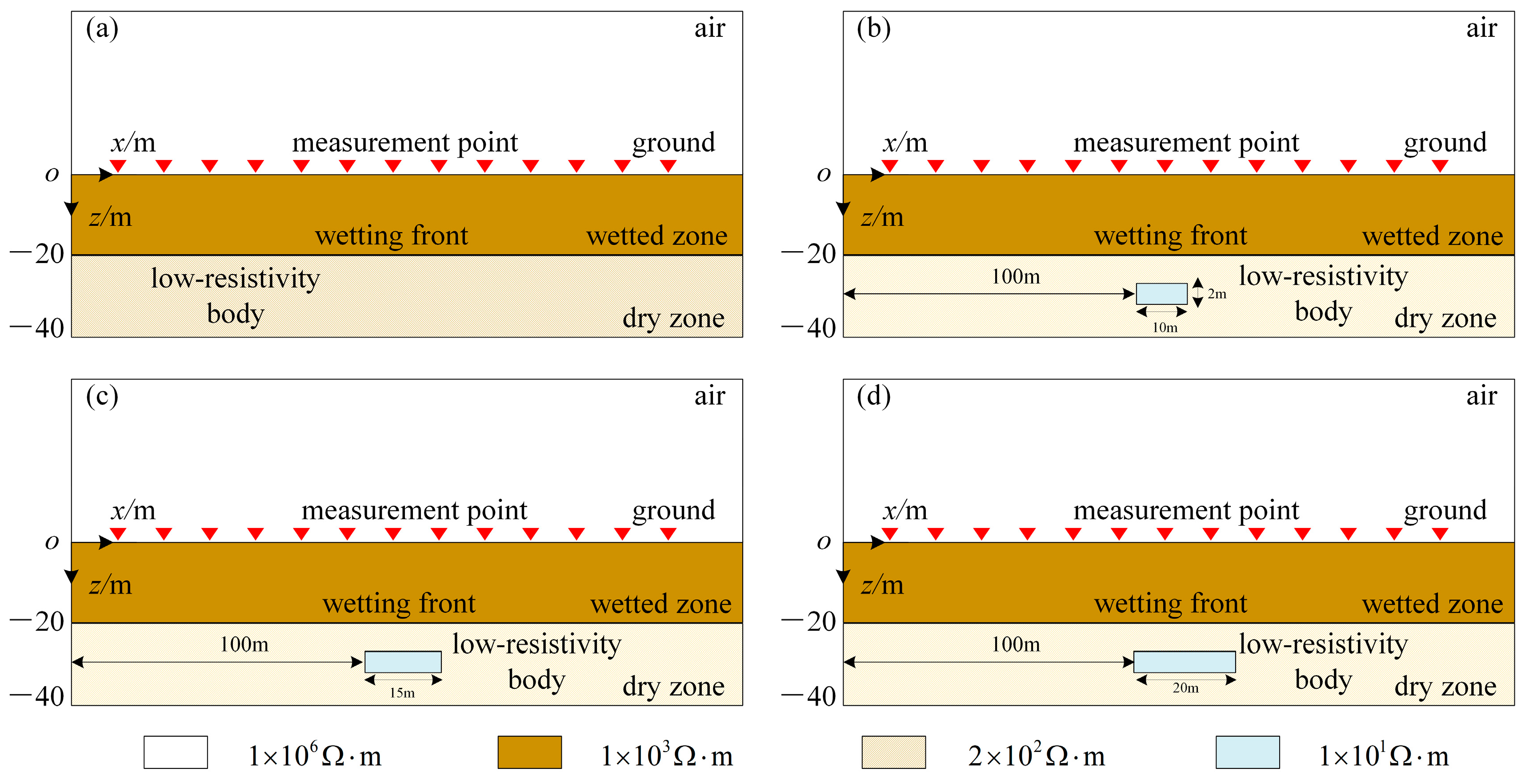
3.1. Model Design and Accuracy Verification
3.2. Analysis of Response Characteristics
3.3. Time-Lapse Monitoring Method
4. Engineering Case
5. Discussion
- In genuine embankment environments, seepage processes involve increased pore saturation, elevated ion concentrations, and channel expansion. These events lead to progressive resistivity reduction and a more obvious electrical response. Although our numerical models only expand anomaly dimensions without altering resistivity, the time-lapse transient electromagnetic method effectively captures dynamic expansion trends. Building on this finding, we infer that in real-world dam settings—where resistivity variations coincide with the spatial growth of anomalous zones—the method’s ability to dynamically identify seepage hazards will be even more pronounced. Unexpectedly, we also succeeded in applying the technique to evaluate grouting effectiveness in an engineering case, indicating that time-lapse transient electromagnetic surveys hold promise for grouting monitoring, mine-water hazard assessment, and related applications [36].
- In engineering applications of time-lapse TEM, continuous long-term monitoring remains impractical due to hardware limitations. As a result, repeated surveys replace continuous monitoring. Although some success has been achieved, additional measures are needed to improve the reliability of the monitoring results. For example, the equipment should be calibrated before each data acquisition to ensure consistent instrument performance, the positions of survey stations along the line should be precisely re-established to minimize positional discrepancies and enhance repeatability, and ambient noise should be measured and the data denoised prior to acquisition to eliminate interference caused by environmental noise fluctuations.
- The time-lapse TEM has inherent limitations. In the early stages of seepage-channel development, the resistivity contrast with the surrounding medium is minor, so time-lapse TEM is not sufficiently sensitive to detect nascent seepage paths. Moreover, when several vertically distributed seepage channels occur within the dam body, the method’s vertical resolution is inadequate to distinguish the individual anomalies effectively.
6. Conclusions
- A resistivity-variation-rate-based time-lapse processing method is derived, effectively eliminating the interference of the dam body soil layer and highlighting the response characteristics of potential seepage-prone zones.
- Results from numerical simulations reveal that the maximum negative resistivity variation consistently localizes at the geometric center of newly expanded anomalies, even when resistivity remains constant and only the spatial scaling of the anomaly body is expanded. This confirms the capability of the time-lapse transient electromagnetic method in resolving spatial expansion trends of subsurface anomalies and sensitively tracking dynamic evolution characteristics of newly expanded anomaly areas.
- Field testing confirms the time-lapse transient electromagnetic method detects latent seepage defects within the embankment and quantifies grouting remediation efficacy. It also delineates the evolution of the seepage zone by analyzing the resistivity changes over different observation periods. This technique provides an effective technical means for embankment project monitoring and risk management.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, C.; Wang, G. Water security, and hydroscience and technology in China: Focuses and frontiers. Sci. Sin. Technol. 2015, 45, 1007–1012. [Google Scholar]
- Feng, Y. Analysis and reflection on characteristics of dikes dangers in middle and lower reaches of Yangtze River in 2020. Yangtze River 2020, 51, 31–33. [Google Scholar]
- Flores-Berrones, R.; Ramírez-Reynaga, M.; Macari, E. Internal Erosion and Rehabilitation of an Earth-Rock Dam. J. Geotech. Geoenviron. Eng. 2011, 137, 150–160. [Google Scholar] [CrossRef]
- Yuan, B.; Liang, J.; Huang, X.; Huang, Q.; Zhang, B.; Yang, G.; Wang, Y.; Yuan, J.; Wang, H.; Peng, Y. Eco-efficient recycling of engineering muck for manufacturing low-carbon geopolymers assessed through LCA: Exploring the impact of synthesis conditions on performance. Acta Geotech. 2024. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S.; Duan, X.; Gu, Y.; Pang, Q.; Yang, C. Physical modelling of initial seepage failure process. Int. J. Phys. Model Geo. 2015, 15, 220–228. [Google Scholar]
- Beiranvand, B.; Rajaee, T. Application of artificial intelligence-based single and hybrid models in predicting seepage and pore water pressure of dams: A state-of-the-art review. Adv. Eng. Softw. 2022, 173, 103268. [Google Scholar] [CrossRef]
- Cen, W.; Du, X.; Li, D.; Yuan, L. Oblique Incidence of Seismic Wave Reflecting Two Components of Design Ground Motion. Shock Vib. 2018, 2018, 412703. [Google Scholar] [CrossRef]
- Li, F.; Cheng, J.; Chen, S.; Kang, Q.; Li, G.; Liu, D. Fine detection of overburden strata based on time lapse high density resistivity method. Int. J. Min. Sci. Technol. 2019, 4, 1–7. [Google Scholar]
- Su, H.; Ma, J.; Zhou, R.; Wen, Z. Detect and identify earth rock embankment leakage based on UAV visible and infrared images. Infrared Phys Technol. 2022, 122, 104105. [Google Scholar] [CrossRef]
- Xiao, P.; Zhao, R.; Li, D.; Zeng, Z.; Qi, S.; Yang, X. As-Built Inventory and Deformation Analysis of a High Rockfill Dam under Construction with Terrestrial Laser Scanning. Sensors 2022, 22, 521. [Google Scholar] [CrossRef]
- Liu, G.; Hu, J.; Liu, L.; Sun, Q.; Wu, W. Investigating Deformation Mechanism of Earth-Rock Dams with InSaR and Numerical Simulation: Application to Liuduzhai Reservoir Dam, China. Remote Sens. 2023, 15, 4110. [Google Scholar] [CrossRef]
- Liu, T.; Sun, W.; Kou, H.; Yang, Z.; Meng, Q.; Zheng, Y.; Wang, H.; Yang, X. Experimental Study of Leakage Monitoring of Diaphragm Walls Based on Distributed Optical Fiber Temperature Measurement Technology. Sensors 2019, 19, 2269. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Fan, Z. Earth-rockfill dam safety classification and risk rate assessment on flood control. J. Hydraul. 2008, 01, 35–40. [Google Scholar]
- Yuan, B.; Liang, J.; Zhang, B.; Chen, W.; Huang, X.; Huang, Q.; Li, Y.; Peng, Y. Optimized reinforcement of granite residual soil using a cement and alkaline solution: A coupling effect. J. Rock Mech. Geotech. Eng. 2025, 17, 509–523. [Google Scholar] [CrossRef]
- Shi, X.; Yan, S.; Fu, J.; Chen, M. Time-frequency analysis on influence of low resistive shielding layer in the exploration of transient electromagnetic field. Coal Geol. Explor. 2009, 37, 51–54. [Google Scholar]
- Li, M.; Liu, S.; Jiang, Z.; Su, B.; Chen, S. Detecting floor geological information bymine DC perspective and 3D inversion. J. China Coal Soc. 2022, 47, 2708–2721. [Google Scholar]
- Loke, H.; Chambers, J.; Rucker, D.; Kuras, O.; Wilkinson, P. Recent developments in the direct-current geoelectrical imaging method. J. Appl. Geophys. 2013, 95, 135–156. [Google Scholar] [CrossRef]
- Tao, T.; Han, P.; Ma, H.; Tan, H. 3D Time-lapse resistivity inversion. J. Geophys. 2024, 67, 3973–3988. (In Chinese) [Google Scholar]
- Oldenborger, G.; Knoll, M.; Routh, P.; LaBrecque, D. Time-lapse ERT monitoring of an injection/withdrawal experiment in a shallow unconfined aquifer. Geophysics 2007, 72, A47–Z71. [Google Scholar] [CrossRef]
- Bording, T.; Fiandaca, G.; Maurya, P.; Auken, E.; Christiansen, A.; Tuxen, N.; Klint, k.; Larsen, T. Cross-borehole tomography with full-decay spectral time-domain induced polarization for mapping of potential contaminant flow-paths. J. Contam. Hydrol. 2019, 226, 103523. [Google Scholar] [CrossRef]
- Yue, J.; Zhang, H.; Yang, H.; Li, F. Electrical Prospecting Methods for Advance Detection: Progress, problems, and prospects in Chinese coal mines. IEEE Geosci. Remote Sens. Mag. 2019, 7, 94–106. [Google Scholar] [CrossRef]
- Lu, T.; Gao, H.; Yang, Y.; Zhou, S. The Transient Electromagnetic Characteristics of Multitarget Unexploded Ordnance (UXO). IEEE Trans. Geosci. Remote Sens. 2024, 62, 2004514. [Google Scholar] [CrossRef]
- McLachlan, P.; Christiensen, N.; Grombacher, D.; Christiansen, A. Evaluating the impact of correlated noise for time-lapse transient electromagnetic (TEM) monitoring studies. Near Surf. Geophys. 2023, 21, 333–342. [Google Scholar] [CrossRef]
- Zamora-Luria, J.; McLachlan, P.; Maurya, P.; Liu, L.; Grombacher, D.; Christiansen, A. A feasibility study on time-lapse transient electromagnetics for monitoring groundwater dynamics. Geophysics 2023, 88, E135–E146. [Google Scholar] [CrossRef]
- Zamora-Luria, J.; McLachlan, P.; Christiansen, A. Long-term monitoring of water table and saltwater intrusion dynamics through time-lapse transient electromagnetic. Near Surf. Geophys. 2024, 22, 636–651. [Google Scholar] [CrossRef]
- Hansen, P.; O’Leary, C. The Use of the L-Curve in the Regularization of Discrete Ill-Posed Problems. SIAM J. Sci. Comput. 1993, 14, 1487–1503. [Google Scholar] [CrossRef]
- Zhu, J.; Jiang, Z.; Yin, C.; Qiu, C.; Li, M.; Gao, Z. Finite-element forward modeling of transient EM in mines under metal interference. J. China Coal Soc. 2024, 49, 4578–4589. [Google Scholar]
- Lu, K.; Yue, J.; Fan, Y.; Li, X.; Zhou, J.; Qi, Y. Three-dimensional transient electromagnetic large-scale forward modeling based on unstructured tetrahedral mesh. J. Geophys. 2025, 68, 327–341. (In Chinese) [Google Scholar]
- Suski, B.; Revil, A.; Titov, K.; Konosavsky, P.; Voltz, M.; Dagès, C.; Huttel, O. Monitoring of an infiltration experiment using the self-potential method. Water Resour. Res 2006, 42, W08418. [Google Scholar] [CrossRef]
- Yuan, B.; Chen, W.; Li, Z.; Zhao, J.; Luo, Q.; Chen, W.; Chen, T. Sustainability of the polymer SH reinforced recycled granite residual soil: Properties, physicochemical mechanism, and applications. J. Soils Sediments 2023, 23, 246–262. [Google Scholar] [CrossRef]
- Xue, G.; LI, X.; Di, Q. The progress of TEM in theory and application. Prog. Geophys. 2007, 04, 1195–1200. [Google Scholar]
- Cheng, J.; Li, F.; Peng, S.; Sun, X. Research progress and development direction on advanced detection in mine roadway working face using geophysical methods. J. China Coal Soc. 2014, 39, 1742–1750. [Google Scholar]
- Fan, T.; Zhao, Z.; Wu, H.; Lu, J.; Wang, J. Research on inductance effect removing and curve offset for mine TEM with multi small loops. J. China Coal Soc. 2014, 39, 932–940. [Google Scholar]
- Yang, H.; Yue, J.; Li, F. The decay characteristics of transient electromagnetic fields stimulated by ramp step current in multi-turn small coil. J. Geophys. 2019, 62, 3615–3628. (In Chinese) [Google Scholar]
- Hu, X.; Chen, R.; Zhang, P.; Wu, R.; Fu, M.; Zhou, H. Development and experiment of transient electromagnetic common centerzero-flux coil. J. China Coal Soc. 2023, 48, 918–930. [Google Scholar]
- Guo, Y.; Cui, Y.; Xie, J.; Luo, Y.; Zhang, P.; Liu, H.; Liu, J. Seepage detection in earth-filled dam from self-potential and electrical resistivity tomography. Eng. Geol. 2022, 306, 106750. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, B.; Chai, L.; Qian, W. Embankment Project Monitoring Using the Time-Lapse Transient Electromagnetic Method: Numerical Simulation and Field Applications. Water 2025, 17, 1341. https://doi.org/10.3390/w17091341
Wang Y, Wang B, Chai L, Qian W. Embankment Project Monitoring Using the Time-Lapse Transient Electromagnetic Method: Numerical Simulation and Field Applications. Water. 2025; 17(9):1341. https://doi.org/10.3390/w17091341
Chicago/Turabian StyleWang, Ying, Bo Wang, Lunwei Chai, and Wangping Qian. 2025. "Embankment Project Monitoring Using the Time-Lapse Transient Electromagnetic Method: Numerical Simulation and Field Applications" Water 17, no. 9: 1341. https://doi.org/10.3390/w17091341
APA StyleWang, Y., Wang, B., Chai, L., & Qian, W. (2025). Embankment Project Monitoring Using the Time-Lapse Transient Electromagnetic Method: Numerical Simulation and Field Applications. Water, 17(9), 1341. https://doi.org/10.3390/w17091341