1. Introduction
Hydropower has an important role in meeting electricity demands by providing a flexible and stable energy source in a power grid that includes more intermittent sources such as solar and wind power. However, hydropower infrastructure and operating schemes come with an environmental cost for the river ecosystem that prevents migrating fish to spawn in the river system, fish mortality caused by stranding [
1,
2], unsuitable flow conditions [
3], and biodiversity losses [
4]. According to the national plan for improving the ecological conditions in regulated rivers in Sweden, all hydropower facility environmental permits must be renewed [
5]. Measures to improve the ecology in the river for each hydropower plant must be presented, where the goal is to fulfill the Swedish Environmental Code and the demand from the European Water Framework directive to achieve good ecological status (GES) for all watercourses [
5]. Potential restoration measures may be both costly and time-consuming to investigate and implement, as they are often specific to the site and species involved, requiring individual assessments for each area. Hydraulic modelling connected with fish habitat models is one way to make these estimations more cost- and time-efficient.
A common factor among regulated rivers is that discharge management schemes significantly affect the hydraulic conditions in the river [
6]. The frequency of regulation varies, with some rivers being adjusted more frequently to respond to fluctuations in electricity demand driven by energy markets. Operating schemes with rapid discharge fluctuations, also called hydropeaking events, have been studied for the potential effects on river dynamics and fish habitats [
6]. Connecting the river dynamics with the complex behaviour of fish is important to understand the environmental pre-conditions and potential areas of improvement in the regulated river. Hydraulic conditions, morphological preconditions [
1,
7], food availability, temperature [
8], oxygen level, predation, fish social behaviour during different flow conditions [
9], and time during the day [
1] are variables deciding the growth possibilities and ecological conditions for each fish species in the river. Capturing the dynamical behaviour of the river downstream the hydropower plant is important to understand how the discharge schemes affect the habitat areas over a given time period. Determining how the daily hydropeaking fluctuation impacts the river dynamics can give valuable information regarding hydraulic stages [
6] and the potential spawning area [
10]. The down- and up-ramping effects on stranding risks have also been studied [
10,
11], where water level alterations over time are used as a threshold, considering high or low risks of stranding fry and juvenile fish.
To understand the river dynamics and fish habitat as one, hydraulic data could be coupled with Individual-Based Models (IBM) to evaluate the long-term effects on different life stages of fish populations [
12] under different flow regimes such as hydropeaking [
13]. The flow conditions in the river are typically captured with an external hydraulic modelling software [
14], and imported into the IBM, where they are used for environmental and biological analysis [
15]. Using a hydraulic model to resolve the dynamic flow conditions in detail for the substantial time periods required for population-level modelling can be both data intensive and computationally expensive. Therefore, the depths and velocities can be simulated for different steady-state discharges, and they can be linearly interpolated to acquire intermediate velocities and depths under different flow conditions, which can then be combined in different ways to represent the flow conditions over a longer period of time [
13,
16,
17]. This method requires several flow inputs to give a reliable result [
16], but it is useful for evaluating new hydraulic conditions and operating schemes. However, steady-state interpolation assumes instantaneous equilibrium and does not account for storage effects, backwater influences, natural damping of the rivers, and response times, which can lead to errors in hydropeaking-affected rivers where hysteresis effects are present [
18]. Although this approach is computationally efficient, it lacks the ability to capture short-term habitat fluctuations, potentially leading to habitat predictions that do not reflect the real ecological conditions.
Steady-state simulations are commonly used to estimate the hydraulic conditions in a river with different discharges [
11,
14,
19]. In many cases, steady-state models are integrated into a habitat suitability index (HSI) model, which might introduce challenges in rivers regulated by hydropeaking operations. The simulations assume constant flow conditions where the discharge could either be averaged over days, months, or years, or it could be estimated to be a high peak or low flow. The discharge hydrographs for different up- and down-ramping events are also often assumed to go from a constant discharge to another constant state [
10,
20]. These types of simulations have shown good correlation during validation, since the interesting area is often a limited part of the river, and downstream boundaries can be placed far away from the interesting area so it does not effect the hydraulic results [
20]. Using the energy slope as a boundary condition [
21] or a constant water surface elevation [
14] is a practical solution in scenarios where downstream regulation have minimal or no effects on upstream hydraulic conditions.
In some regulated rivers, both upstream and downstream hydropeaking operations influence hydraulic conditions, often resulting in decoupling between discharge and water levels. This means that a constant upstream discharge does not necessarily correspond to stable water levels, as downstream regulation can alter flow propagation via discharge release in the reservoir, which smooths out or delay changes in water levels. This can introduce variations where the assumptions of constant discharge and water level could lead to inaccurate predictions.
In hydropeaking rivers, key unresolved questions remain regarding how the temporal resolution of streamflow data and the spatio-temporal variation in flow depth, velocity, and wetted width influence environmental assessments [
22]. Together with the non-stationary hydrological regimes driven by climate change and altered energy demand, the challenges with non-stable discharge water level relationships and capturing the correct time scale for the dynamic flow conditions [
22] are important to resolve to assess the impact on the local scale of the river. Looking also at long-term fish habitats, the reservoir level in a hydropeaking river varies over the year, and therefore, hydraulic conditions for the same upstream discharge can differ. What applies during summer, when measurements for model calibration are often conducted, may not apply during spring or fall, when the river hydraulics are particularly influenced by downstream regulation or seasonal changes. This is a challenge when using steady-state interpolation, which assumes that water levels and velocities can be approximated from a set of simulated steady-state conditions. Although transient modeling is increasingly used in such cases, the high computational demands and uncertanties in defining realistic boundary conditions still make steady-state interpolation attractive for habitat assessments [
23]. While steady-state interpolation is still commonly used in habitat models [
13,
16], its performance in hydropeaking rivers with regulation effects has been less explored [
23].
This study critically evaluates whether steady-state interpolation can be a viable alternative in hydropeaking rivers with strong downstream influences. Additionally, this study examines whether steady-state simulations can be effectively used during periods of relatively stable reservoir water levels, while reserving transient simulations for periods of significant flow variation, such as spring floods, to capture essential questions connected to the time dependency of flow dynamics in hydropeaking rivers [
22]. This hybrid approach could optimise computational resources while maintaining accuracy in habitat assessments. As part of a broader effort to connect hydraulic modelling with IBMs, this work serves as a first step in assessing the suitability of steady-state interpolation for this system. The analysis compares steady-state interpolation with a fully transient simulation, examining their performance in predicting hydraulic parameters relevant to habitat assessment. This study uses Delft3D FM Suite 2024.03 HMWQ for both transient and steady-state modelling, with MATLAB R2023b used for linear interpolation over time for the steady-state results. The findings provide practical insights into the limitations and benefits of steady-state interpolation, particularly in terms of flow dampening and downstream effects.
Study Area
The studied river is a regulated river in the northern part of Sweden, located between two hydropower plants, Akkats and Letsi. The distance between the upstream power plant and downstream dam is roughly 30 km. The 2D hydraulic model is limited to 15 km, measured from the outlet of the hydropower station upstream at the left corner in
Figure 1. Further downstream, the hydraulic conditions are similar to a reservoir, so this area was excluded from the model in order to save computational time.
There was no comprehensive detailed bathymetry measurement over the entire river reach; rather, the bathymetry of the river is a combination of three digital elevation model (DEM) datasets, which all were provided by Vattenfall, AB. The height elevation data for floodplains and land area were provided by the Swedish land survey authority (Lantmäteriet). To combine the DEMs together, the geographic information system (GIS) tool ArcMap 10.8.2 was used with the reference system SWEREF 99 TM. This resulted in discontinuities in some overlapping areas, indicating that the datasets had measured the heights differently, even though they were extracted from same reference system. However, these discontinuities were small relative to the scale of the simulation domain and primarily affected localised areas rather than the overall hydraulic parameters. Since this study focuses on comparing modelling approaches rather than absolute accuracy, these errors are unlikely to significantly affect the comparative analysis.
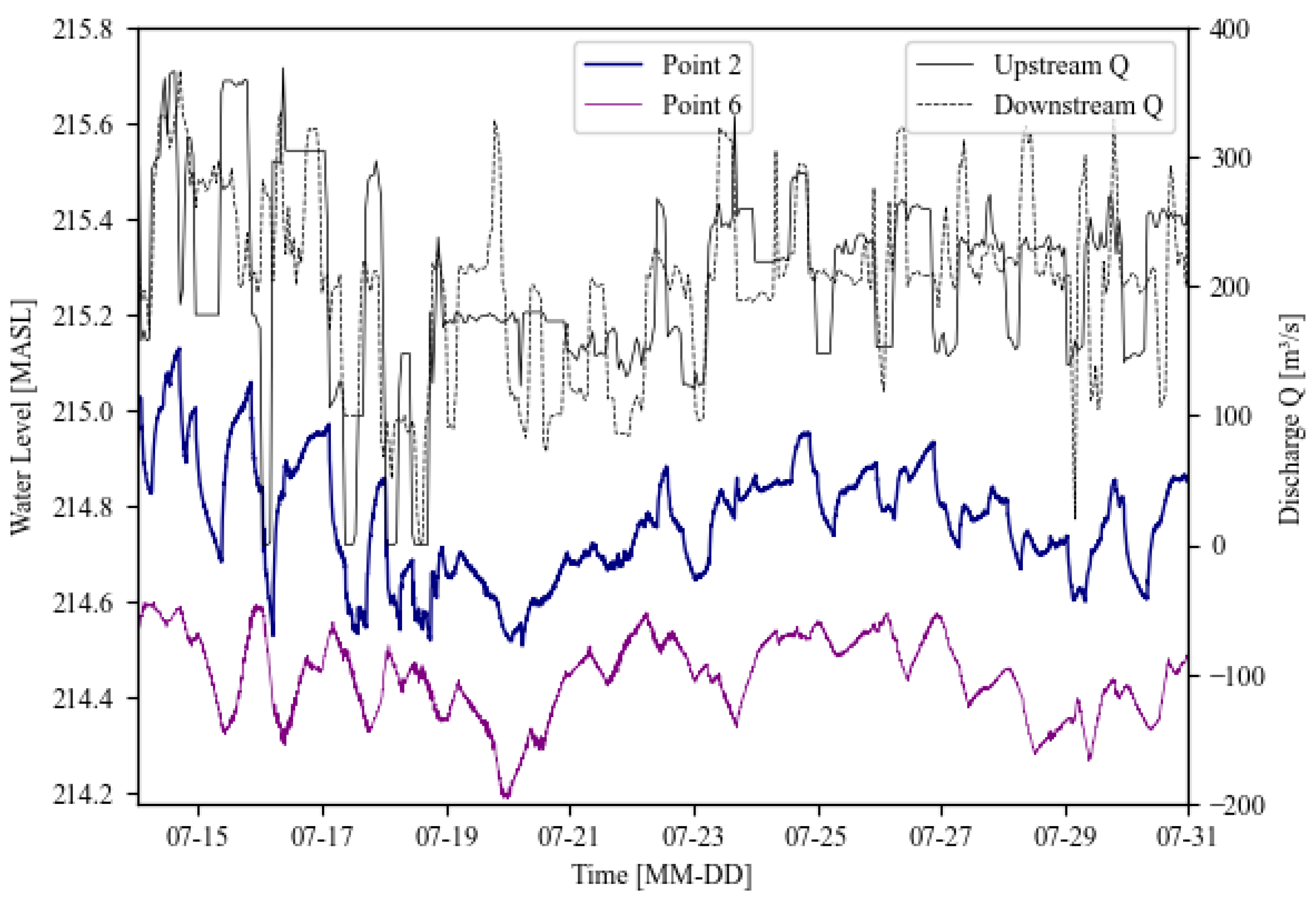
Previous work has been done in the river where the depth was measured from June–September 2021 with six pressure loggers together with an real-time kinematic (RTK) GPS pole to obtain the height elevation of the pressure loggers [
24]. Combining the depth and elevation, the water surface elevation (WSE) can be obtained. The pressure logger locations are seen in
Figure 1. The WSE from measurement points 2 and 6 is presented in
Figure 2, with upstream and downstream discharge provided by Vattenfall, AB (
Figure 2).
3. Mesh Study and Calibration
The domain is discretised with a flexible mesh in the mesh module RGFGRID in Delft3D FM. The grid is built up of rectangular elements in the main channel and triangular elements in areas peripheral to the main channel [
26]. The approach has been discussed in various studies [
45,
46], where flexible meshes have been shown to give good results and be computationally efficient. Key mesh properties such as aspect ratio and orthogonality are critical for resolving the equations properly. The recommended aspect ratio is between 1:2 and 1:4, so the length of each cell should not exceed four times its width [
25], with an optimal value of around 1:3. The orthogonality should ideally remain below 0.02 in the interesting areas [
25], and it was kept below 0.02. The transition between triangular cells should maintain smoothness between 10 and 20%, although some shoreline regions showed values as high as 40–80%. Another important property of the mesh is that it is fine enough to resolve an accurate bed elevation. The mesh’s capacity to discretise the bathymetry properties could have a larger impact than the numerical diffusion from mesh properties such as orientation, size, and form [
46]. The bathymetry had a resolution of 2 × 2 m, and the model domain spans over 15 km, with a maximum width of 900 m. This makes it computationally expensive to have a very fine mesh. Five mesh sizes were modeled, where the finest mesh in the study had an average cell size of 4.86 × 2.44 m (
Table 1). The Froude numbers using this mesh for the highest flow in
Figure 2 were above the supercritical limit for 0.2% of the elements and below 0.2 for 73%. In total, 77% of the elements had a defined water depth and Froude number. The high Froude numbers were located close to the inlet, indicating that a fine resolution is necessary to capture the flow changes and transition zones in this region.
Four cross sections were chosen for the mesh studies: one across an island, one with triangular/curvilinear transition, one upstream at the widest part in the channel, and one in the most narrow part (
Figure 1). The bed level was resolved in ArcMap and then compared to the bed level variable in Delft3D FM (
Table 2). The average mean error across all cross sections for the finest mesh was 0.13 m, with an maximum error of 1.96 m. The finest mesh had an overall good agreement with the bathymetry, except for some large outliers. The simulation time for Mesh 5 was around three times higher than for Mesh 4.
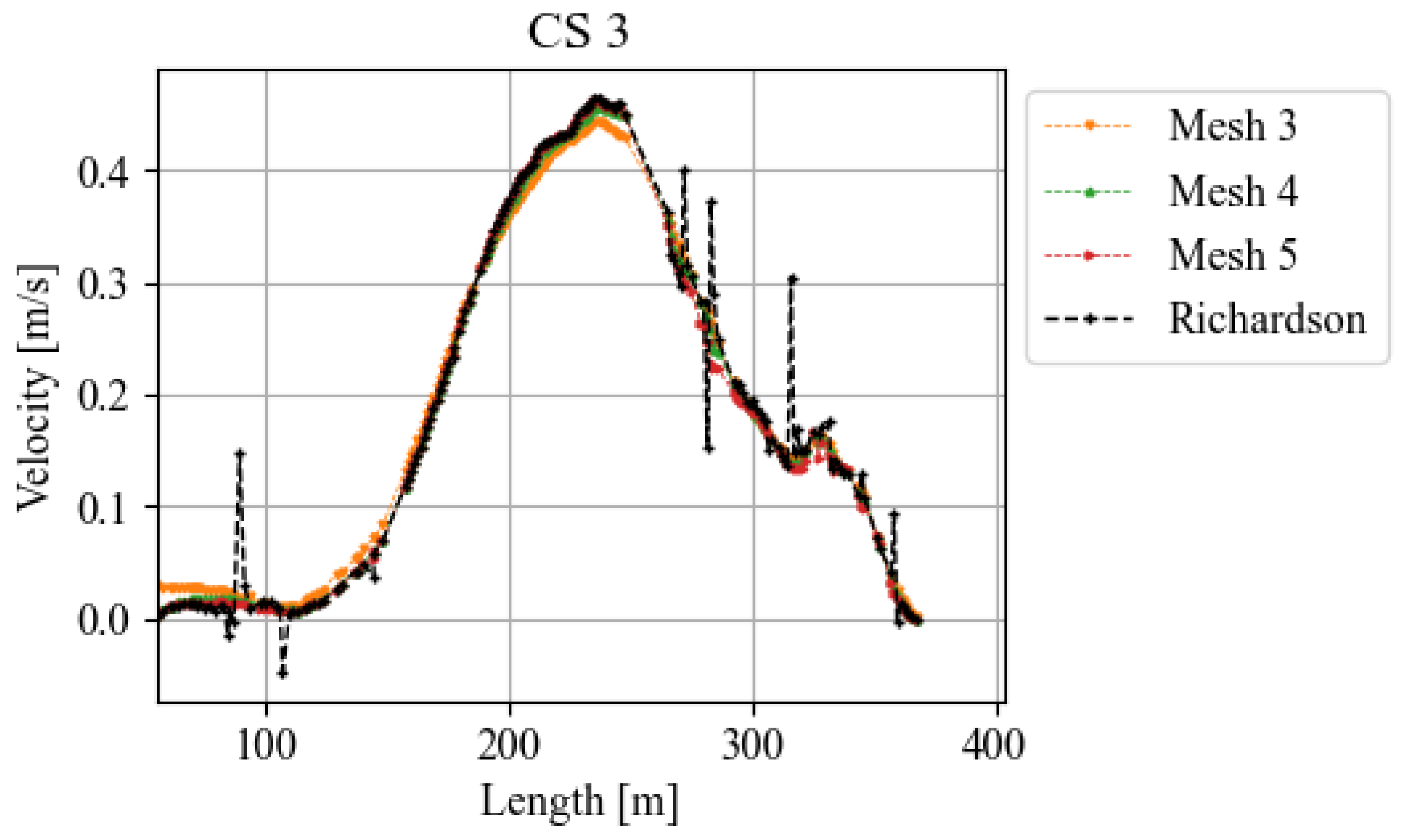
The depth and velocity were chosen as hydraulic parameters to investigate. The depth was compared with the finest mesh, where the depth for Mesh 4 had an average error of 0.05 m and a maximum of 1.16 m (
Table 3). The convergence in velocity was calculated based on Richardson’s Extrapolation [
47] (
Figure 4).
The Richardson extrapolation (
Figure 4) showed some oscillations when the error between two meshes changed sign. This approach assumes a convergence towards a larger or smaller value, and when one mesh suddenly changes sign or overlaps with the other, this lead to oscillatory convergence [
47]. A filter approach was used to minimise the spikes in the results by applying a mask before the calculation to remove division by zero or very small values, and another mask was applied to remove unwanted patterns (e32/e21 < 0) that could lead to oscillations [
47]. The velocity was differing most at cross section CS1, with −3.2% for the finest mesh and −4.2% for the second finest mesh (
Table 4).
Based on the result of the bed-level resolution, computational efficiency, depth, and velocity convergence, Mesh 4 was chosen to resolve the river domain.
The roughness of the bed level was chosen as the calibration parameter. A series of steady-state simulations were performed with a uniform roughness value, varying between 0.01 and 0.10 in increments of 0.01. The simulations were performed with a constant flow rate of 234 m
3/s and 316 m
3/s. These were chosen from the measurements on 11 August and 12 July. The peaks were smoothed over 3 h to approximate steady-state cases. The WSE results from each simulation were compared against six measurement points along the reach. The roughness value that produced the best agreement with the observed WSE at each measurement point was then selected and specified to the area centered around the measurement point. This resulted in a spatially varying roughness distribution where the computational domain was divided into six parts centered around each measuring point. The final roughness values and the differences in water levels from the measurements are shown in
Table 5.
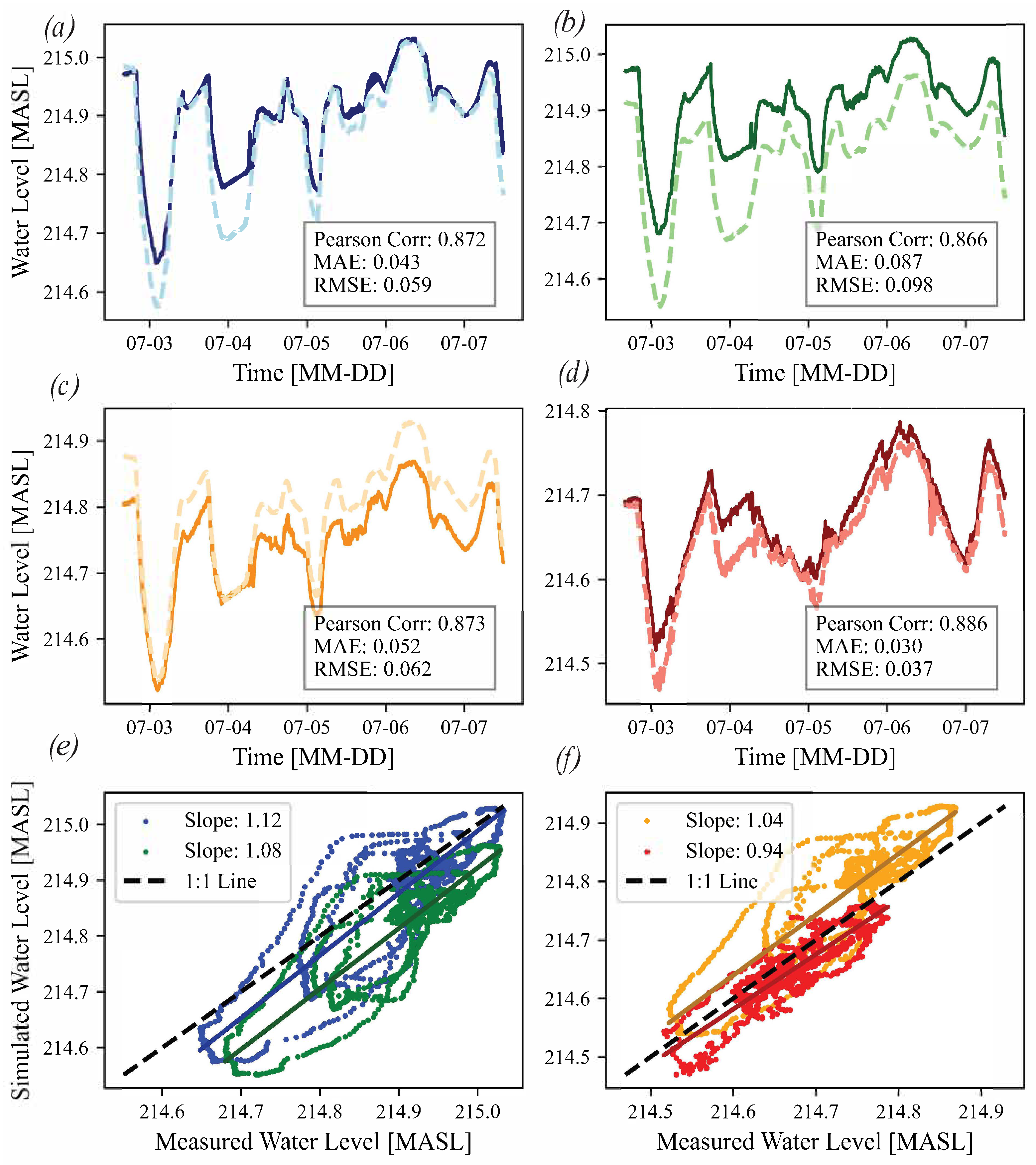
The roughness values for the two cases are quite similar. The mean value between the two flows was chosen, and the roughness was linearly increased or decreased between the computational domains. With the calibrated roughness, the model was simulated between 2 and 7 July to evaluate its performance. The simulated and measured water levels were compared at four points, as shown in
Figure 5a–d.
Figure 5e,f, which include scatterplots illustrating the measured values fitted against the simulated values over time.
The relatively high Pearson correlation coefficient demonstrates that the model captures the patterns of water level changes over time. The highest mean absolute error (MAE) was 0.087 m for Point 3, and the lowest was 0.03 m for Point 5. The root mean square error (RMSE) takes into consideration the high peaks in differences more than the MAE, where a high RMSE indicates that the errors are more spread out from the mean. A lower RMSE suggest that the model predictions are not generally accurate but also do not have significant outliers or large errors. The RMSE was highest for Point 3, which is expected because of the high MAE and low Pearson correlation. With the help of Python 3.12 Numpy module polyfit, the slope and interception were calculated, and together with polyval, a fitted line was plotted. The slope of the line defines the increase and decrease rate of the simulated and observed water level. A slope of one means that for every increase in observed water level, the simulated level increases by the same amount, giving perfect agreement. At point 2 (
Figure 5a), which presents the highest slope, the model underpredicts water levels at the lower end but provides rather accurate estimates at higher water levels. In contrast, at point 3 (
Figure 5c), the model systematically overpredicts the water levels, though its predictions are more accurate at the lower water levels. The model captures the trends based on the Pearson correlation and has a maximum MAE of 0.087 m and a minimum of 0.03 m. There are, however, systematic errors when looking at the slopes, which indicates that the model is either too fast in responding to the changes in water levels (slope > 1) or too conservative (slope < 1). The model overall predicts the water levels at an acceptable level for the purpose of this study.
5. Discussion
The aim of this study was to investigate the differences between a transient and steady-state approach to estimate the dynamic flow conditions of a regulated river. The performance of the hydraulic model was considered accurate enough for this purpose. One thing that could affect the accuracy of the model was the combination of the DEMs of different resolutions. Two high-resolution DEMs (0.25 × 0.25 m) and one lower-resolution DEM (2 × 2 m) were combined. There were differences in the DEMs when comparing the height elevations in several points with an average difference of 1 m. Interpolating these DEMs likely impacts the accuracy of habitat modelling, especially when considering depths. However, since this study focuses on comparing methods, these errors are unlikely to affect the analytical results significantly. To improve the model’s accuracy, it would be preferable to obtain a detailed DEM for the entire river reach.
During the calibration process, increasing the roughness in section 3 led to only minimal improvement at measurement Point 3, while it increased the error at Point 2. The model both under- and overestimates the WSE when the differences in WSE can also be related to uncertainties in the measurements. According to the recorded RTK GPS positions at the beginning and end of the field measurements, at Points 3 and 4, the pressure loggers were displaced, causing variations in height of around ±0.1 m.
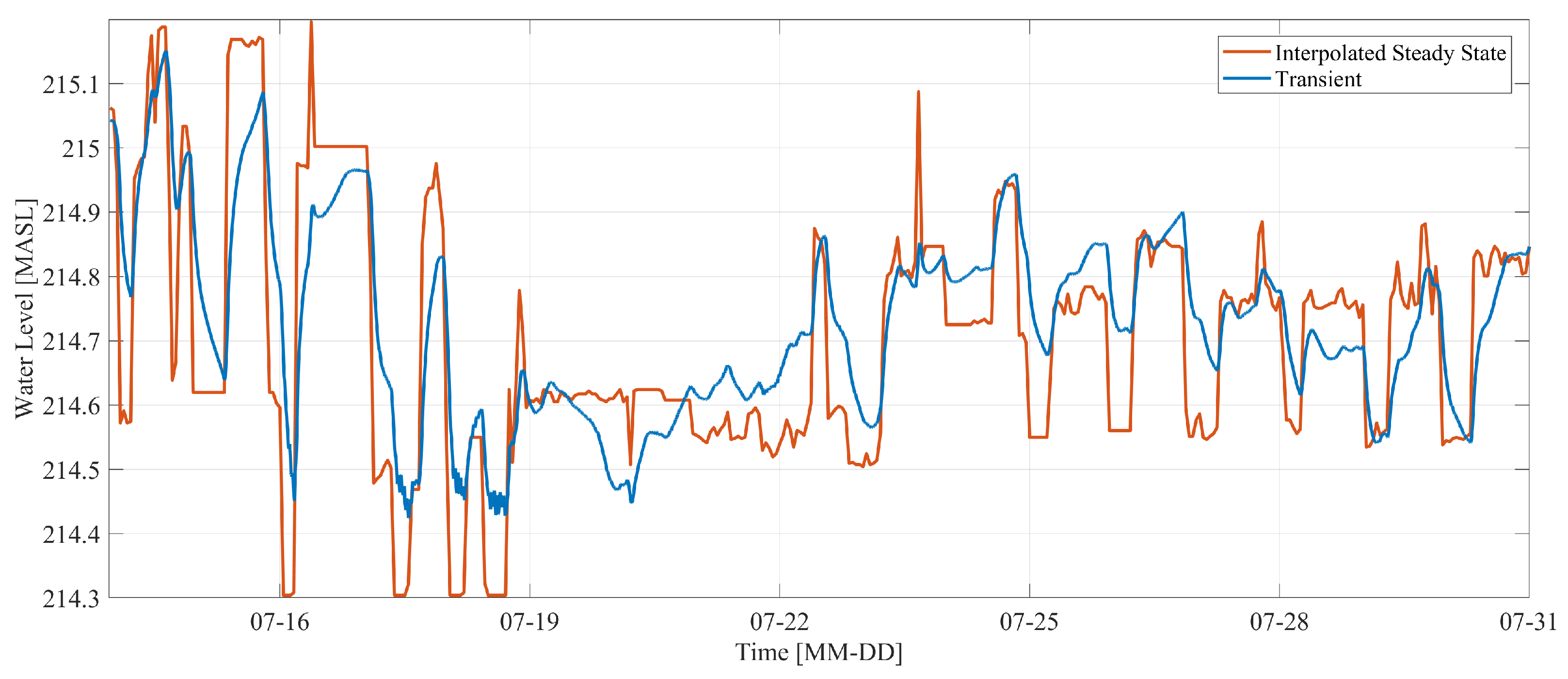
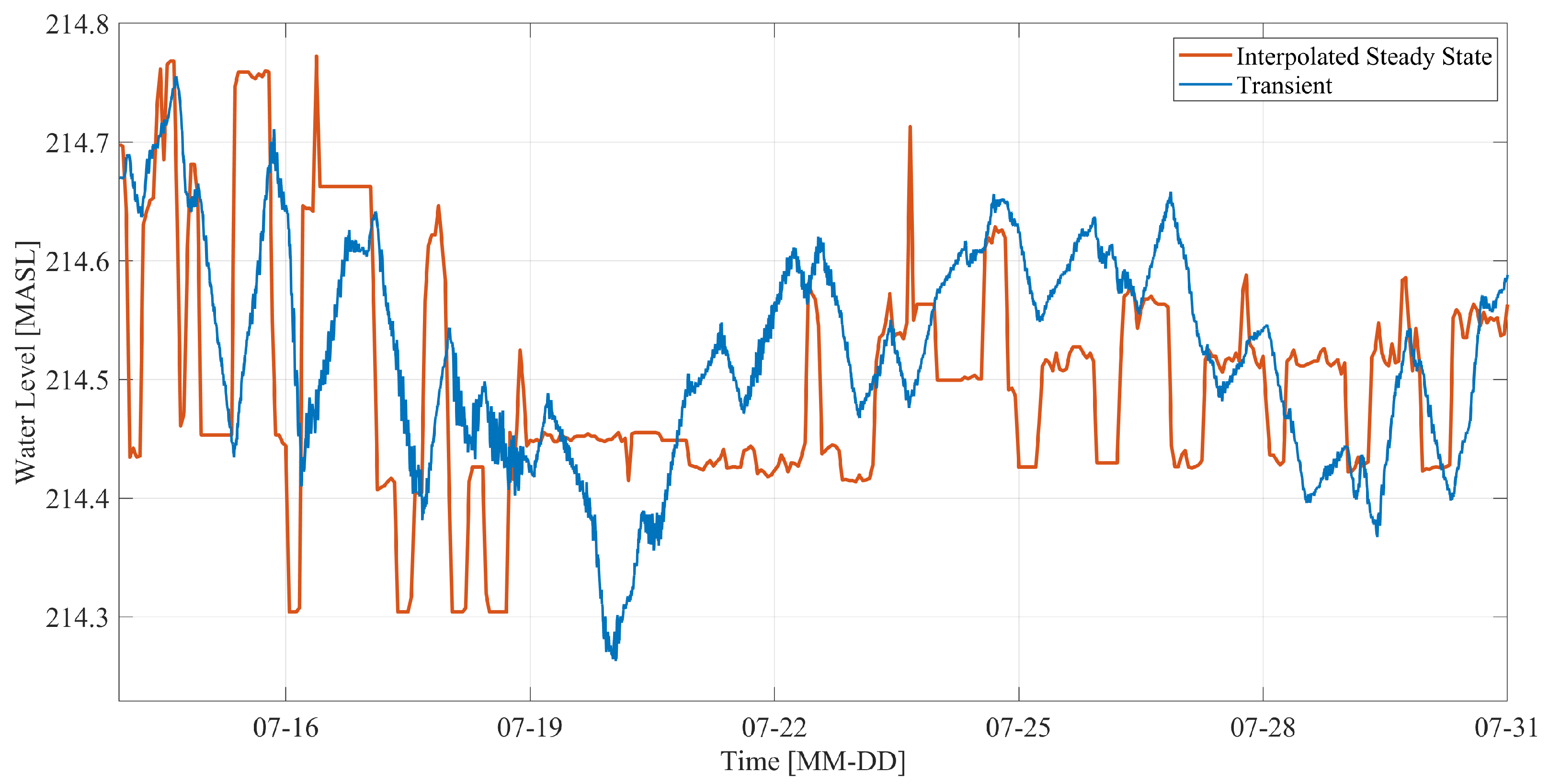
The steady-state cases were estimated manually by choosing different flow conditions, where the criterion was the up- and downstream discharge, and the WSE remained somewhat constant during 2 h. This was hard to find during the simulated period, which could introduce errors into the choice of simulated steady-state cases. Another approach of estimating the steady-state cases might be applied and lead to more accurate results. The choice of a steady-state or transient simulation is especially important when looking at the long-term effects on habitat. The steady-state cases were chosen for a time span during summer, but the downstream reservoir WSE varies depending on the time of the year. The steady-state flows should therefore be chosen over a wider time span to include the high variations during the season. Steady-state interpolation works well in rivers with stable, consistent flows. However, in rivers subjected to frequent hydropeaking or short-term regulation, it is not as accurate at predicting WSE either up- or downstream. Upstream, the steady-state follows the same patterns as the transient, but it over- and under-predicts the WSE with over ±0.1 m. Downstream, the damping properties of the river between different discharges are not taken into consideration where the response time is neglected because of the linear interpolation. However, a damping parameter based on the longitudinal length might be added to account for the neglect in damping [
20].
The transient simulations are more time consuming to conduct but provide more accurate estimations of the hydraulic variables compared to steady-state interpolations. From the calibration, the maximum MAE was 0.087 m. Together with the MAE of 0.088 m and maximum absolute error of 0.4 m, the predicted WSE for the steady-state interpolation has a maximum error of up to 0.49 m, with a MAE of 0.175 m compared to the transient simulation. The advantage of a steady-state interpolated method is that the simulation times are shorter. This study employed a 2 h simulation time for 24 h in the model for the transient simulation, while the steady-state simulations only needed 1–3 h for stabilizing. Once the steady-state simulations were finished, the interpolation could be used to generate hydraulic results, which provide an advantage for longer time series. However, the simulation time for the transient case could be reduced further by using a larger time span for the output storage and using a larger time step by changing the Courant number while still ensuring stability. The hydraulic results are given to an output file during the required time span, so one does not need to wait for the whole simulation to finish to perform habitat studies but could couple these processes together. However, a transient simulation still presents challenges due to downstream boundary conditions. In cases where studies on environmental flows (E-flows) are required without performing field studies and experiments, the downstream boundary becomes a significant problem in low-sloping rivers between two hydropower plants. The water level boundary in the model had a significant impact on the downstream areas the river reached, roughly 4 km away from the boundary, which were affected by the set boundary. To solve the downstream boundary without going back to linear interpolation, a machine learning model might be developed. This model could be trained on data such as upstream and downstream discharge, reservoir water levels, and measured WSEs within the study region, and it might be able to predict the relationship and generate downstream boundary conditions for E-flows in these types of cases more accurately than interpolation alone.
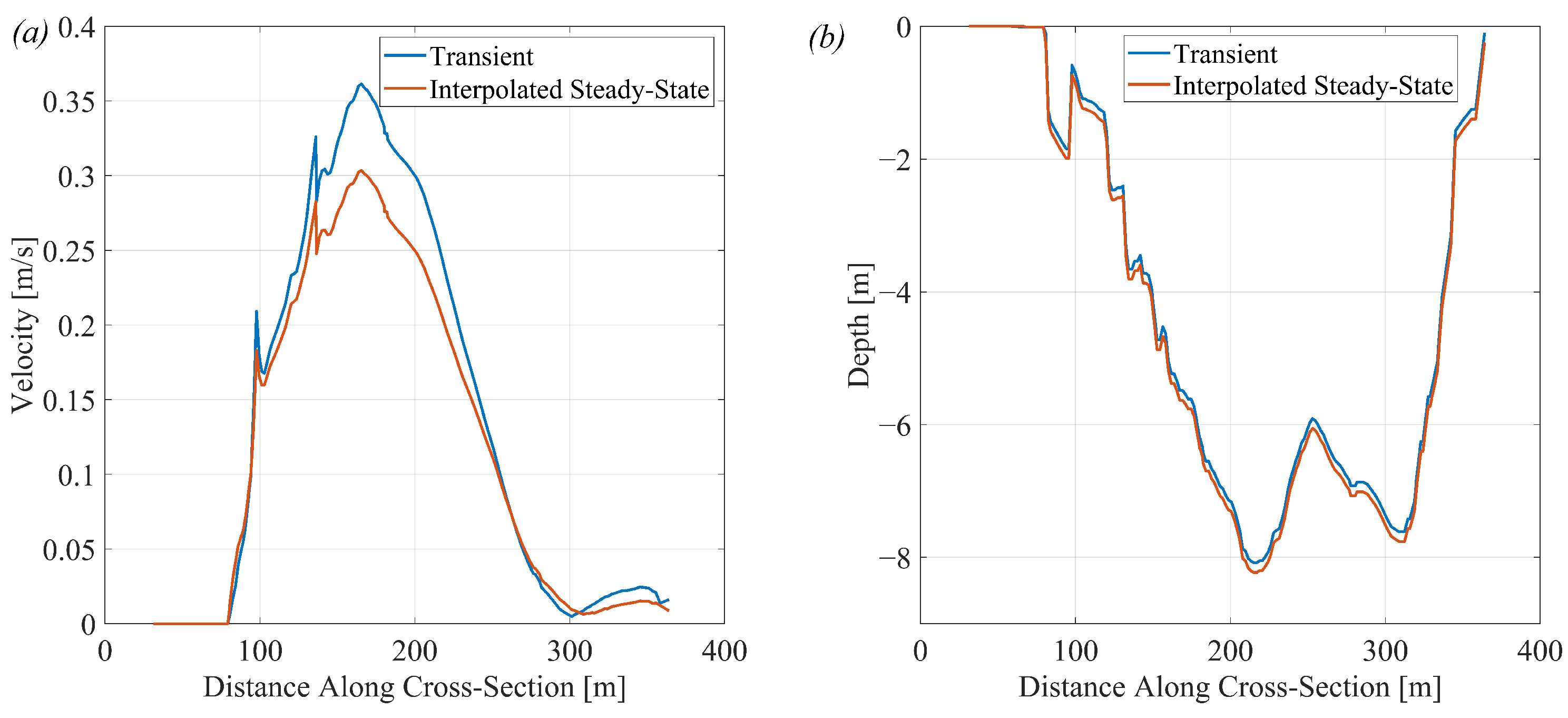
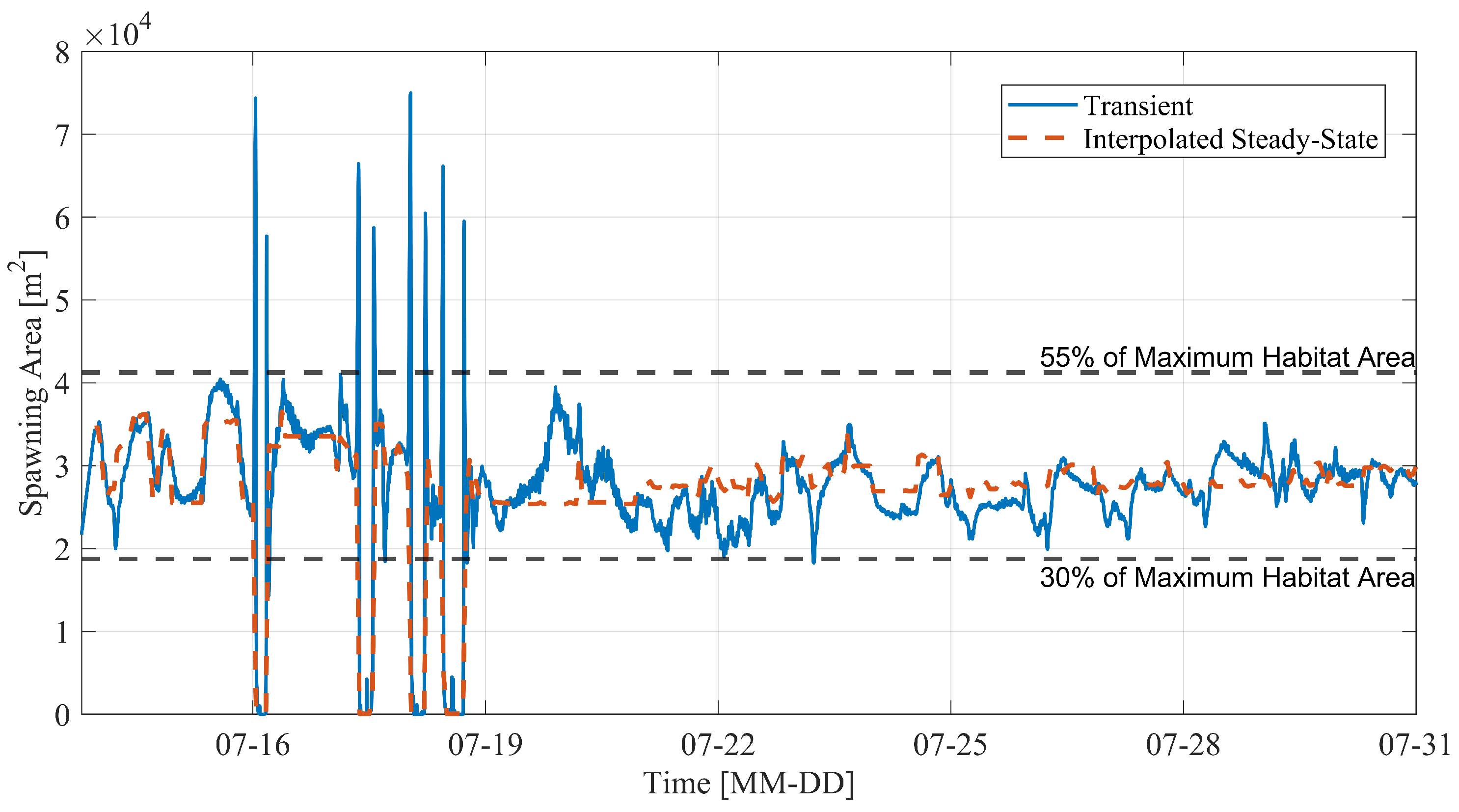
The suitable spawning area for European grayling differs between the methods over time, where the steady-state shows much more stable conditions compared to the transient state. The suitable spawning area is based on suitable depths and velocities. The velocity and depth differences between the methods in one cross section were 0.06 m/s and 0.15 m. Looking at the preferable range of depths and velocities, 0.3–0.5 m and 0.4–0.9 m/s [
30] for European grayling, an error of 0.15 m and 0.06 m/s could make a significant difference on the suitable spawning grounds. The difference is especially seen around 19–21 July in
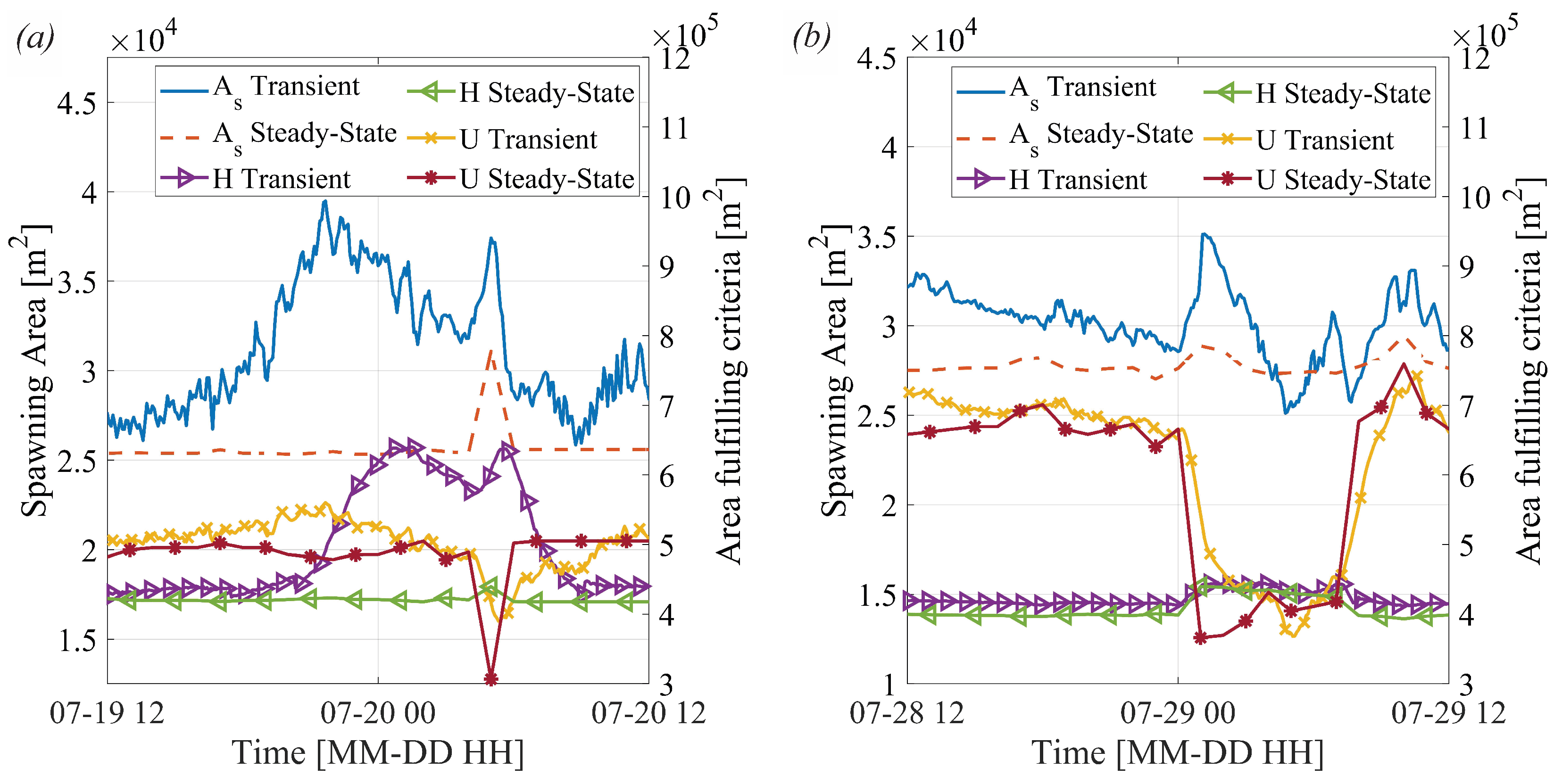
Figure 11, where the suitable spawning ground for the transient simulation is higher than the steady-state interpolation. The comparison between steady-state interpolation and transient simulations reveals significant differences in
Figure 12. In the first scenario, where the upstream discharge remains constant but downstream regulation affects water levels, depth variation accounts for the largest difference, with a 52.9% difference in available spawning depth and a 32.2% difference in total habitat area. This highlights the inability of steady-state interpolation to capture the downstream regulation. In the second scenario, an upstream down-ramping event causes a 38.8% overestimation of velocity-suitable habitat due to the steady-states immediate response to discharge changes. The transient model, which captures the gradual flow adjustments, provides a more accurate habitat estimation. The MAE in spawning habitat predictions for these cases is 5619 m
2 and 2614 m
2. For an IBM, this means a difference in available spawning habitat affecting the growth of redds and therefore also long-term growth in population. Temporal variability in habitat area influences fish behaviour, as fluctuations in spawning habitat impact both predation risk and survival rates, particularly for younger fish. A more dynamically varying habitat, which aligns with discharge fluctuations, may alter activity patterns, as habitat availability is often reduced at night and increases during the day. This pattern is evident in
Figure 12b, where the transient simulation captures greater variation in spawning area compared to the steady-state interpolation. Since suitable spawning grounds shift over time, capturing the time-dependent habitat dynamics in hydropeaking rivers is crucial for accurately assessing how operational discharge schemes influence fish behaviour and survival.
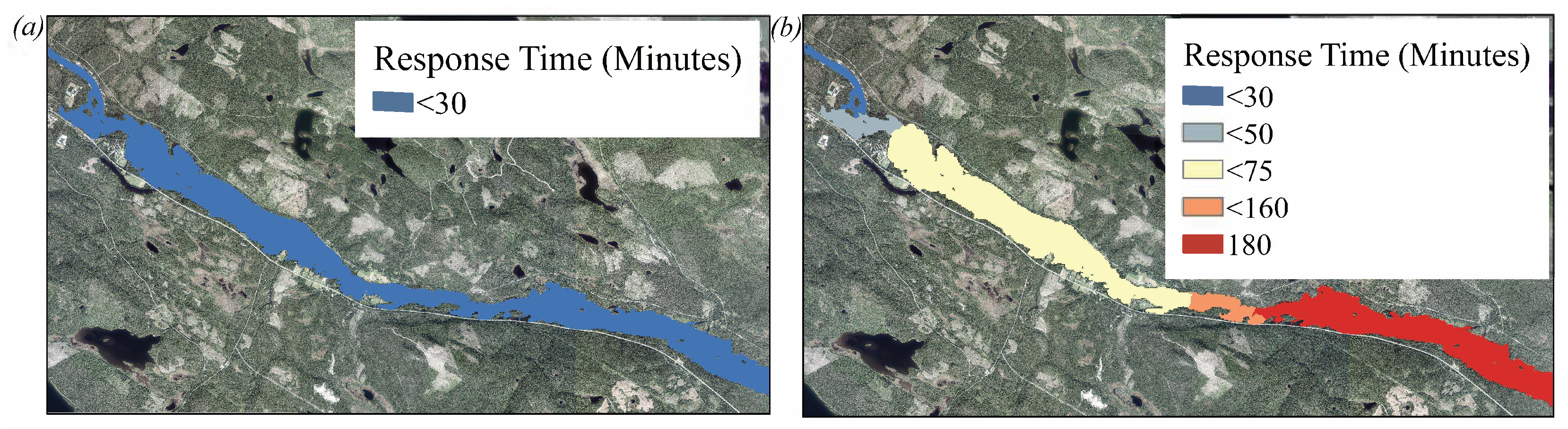
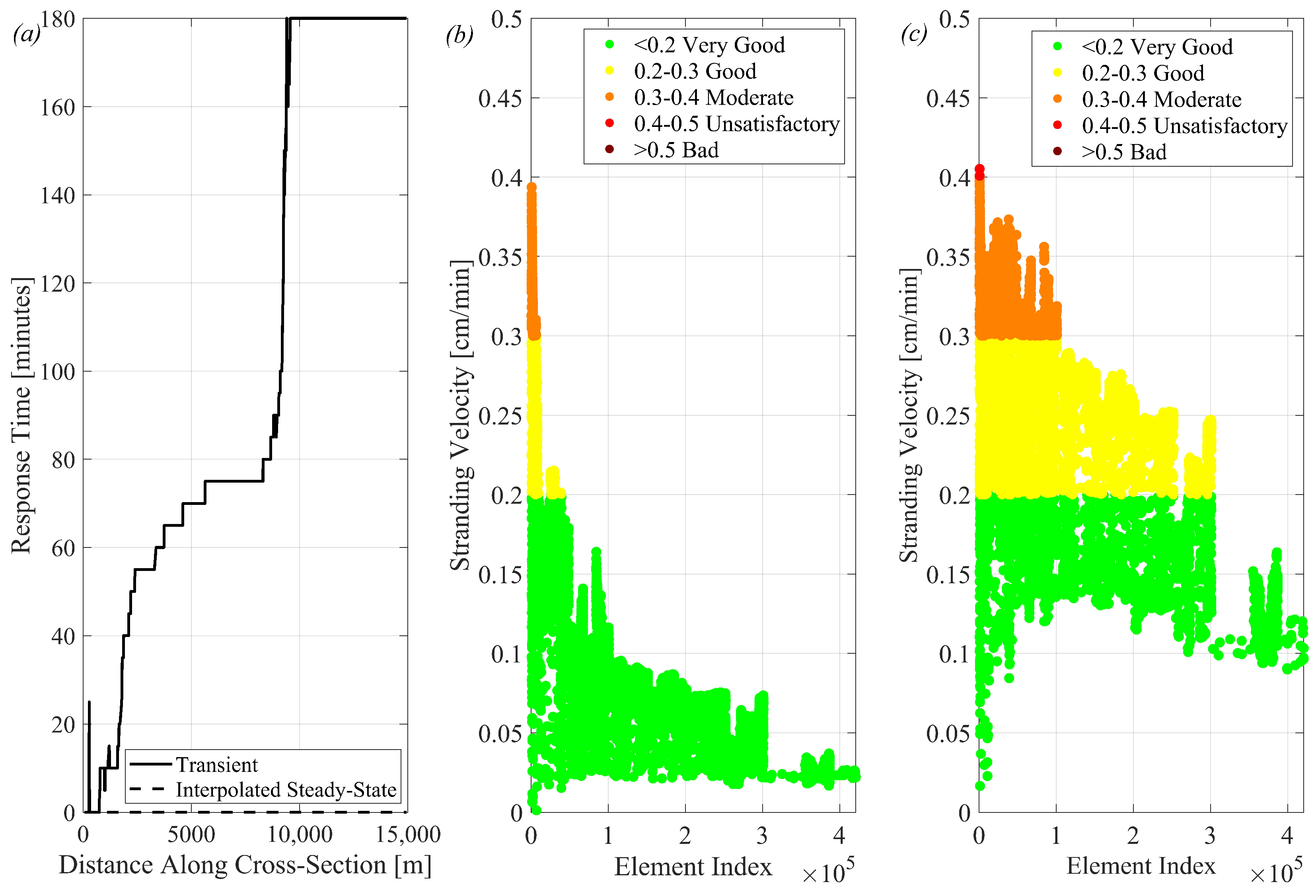
The WSE between the methods is differentiating over time. Upstream, the WSE is following a similar pattern as the transient simulation, but downstream, the damping is neglected. The response time is constant for the whole river for the steady-state interpolation so that the delayed response downstream is not captured by the model. A transient simulation will more accurately represent the damping and the different hydraulic stages across the river [
6]. Capturing the hydraulic stages and the rivers longitudinal effects downstream [
6] is important for evaluating the hydropeaking frequency effect on spawning habitat and stranding risks [
10]. The stranding risks show large differences, where the steady-state shows a much higher risk in more elements than the transient simulation. As a result, the steady-state approach dewaters potential habitat cells much faster than the transient simulation. This results in fewer habitat cells for the fish to choose from in the IBM model, potentially causing redd dewatering and increased mortality, resulting in a negative impact on the fish population. Including the correct down-ramping rates as an output to compare with the thresholds could help with understanding where and when the fish perish and under which flow circumstances. The stranding risk was calculated for only one down-ramping event. In a low-sloping river with low-sloping banks, the lateral down-ramping rate [
36] together with the seasonal variation of baseflow [
35] and reservoir water level during the year could be more interesting to evaluate the stranding risk rather than one isolated down-ramping event.
The scouring risks of redds estimated from the possible sediment transport of suitable substrate are higher for the transient simulations upstream, where the steady-state underestimated the high peaks and overestimated the bed shear stress downstream. The steady-state interpolation method did, however, give a good estimation for lower flow. The possible areas with suitable spawning gravel are defined for each cell in the IBM either by confirming these in the field or using the bed shear stress. Confirming the substrate in situ would reduce the need of analysing the bed shear stress. However, for restoration measures that include adding substrate, the bed shear stress is important to evaluate in order to understand the risk of sediment being transported, eroded away, in the river. The peak bed shear stress is found in the beginning of the discharge increase, and it decreases while the flow remains constant. In previous studies, it was found that the peaks in bed shear stress are not always proportional to the discharge, meaning that the transition periods between base and peak flows are more important to study rather than the peak flow as an isolated case [
43]. The findings of the study [
43] recommended that investigations of restoration measures should consider the unsteady transition period and nonlinear behaviour to understand the impact that flow alterations with high unsteadiness, such as hydropeaking, could have on the rivers’ topography. The transient simulation in this study shows that initial high peaks of bed shear stress when changing the flow regime could not be captured by the steady-state interpolation method. Future restoration measures by adding suitable substrate sizes in spawning areas should consider the transient bed shear stress to ensure the stability of the bed and added substrate during different flow regimes over time.
In future work, a sensitivity analysis regarding the hydraulic inputs to IBMs can be considered to see how different hydraulic conditions can affect fish population dynamics in the long-term. The analysis in this study did not consider the additional complexity and uncertainty that arise when including more variables such as temperature and fish behaviour during different flow conditions and times of the day. The risk of sediment transport in this study is a simplified case and could be developed further by analysing the bed-load transport with a representative transport formula in Delft3D FM D-Morphology to analyse the time-dependent impacts of hydropeaking and include the additional complexity of a riverbed. This could further help to understand the dynamic relationship between hydropeaking rivers, seasonal flows, and the effect on the fish life-cycle and habitat enhancement.
6. Conclusions
This study highlights the challenges of applying hydraulic models for habitat assessments in a high-frequency hydropeaking river where both up- and downstream regulations influence the water levels. The selection between steady-state interpolation and transient simulation for habitat studies must be made with an understanding of how the hydraulic variables are affected by both up- and downstream dynamics and if there is ever a steady-state condition in the river. The hydraulic output from steady-state models should be validated against transient simulations to assess their ability to capture flow variations over time. While steady-state interpolation can provide a preliminary estimation, it introduces additional errors into habitat studies that are already based on generalised data from the literature. This approach neglects the damping within the river, affecting both the spawning areas over time and the dewatering rates. Moreover, it fails to capture the high peaks in bed shear stress, which are important for assessing spawning ground suitability and the scouring risk of redds.
The primary challenge of transient simulations lies in their long computation times, particularly when using fine mesh resolutions. Long-term habitat studies (spanning 3–5 years) that incorporate hourly hydropeaking fluctuations and daily variations would require extensive simulation run times and large storage capacities for model outputs. Additionally, downstream boundary conditions pose a challenge in this system, as water levels are influenced by downstream regulation. In this study, measured water levels were used as the downstream boundary. However, for E-flow assessments, interpolating the downstream boundary is not feasible when regulation effects are significant.
In rivers with stable flow conditions, steady-state interpolation can serve as a useful tool to reduce simulation time and evaluate new operational flow strategies for habitat improvement. In this study, the steady-state interpolation approach resulted in a MAE of 2910 m2 in estimating spawning habitat area. Although this time period had relatively stable conditions considering the annual variation in reservoir water levels, steady-state interpolation seems unsuitable for this river during any time of the year.
In more dynamic rivers, and for decision making regarding river management from a long-term perspective for fish habitat restoration, a steady-state interpolation approach may be unsuitable, and a transient time dependent solution is preferable.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}