
Electrohydrodynamic (In)Stability of Microfluidic Channel Flows: Analytical Expressions in the Limit of Small Reynolds Number




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
Structure of the Article
2. Problem Formulation
2.1. General Equations of Motion
2.2. General Boundary Conditions
2.3. Two-Dimensional Flow and Nondimensional Equations
3. Linearization in the Interface Displacement
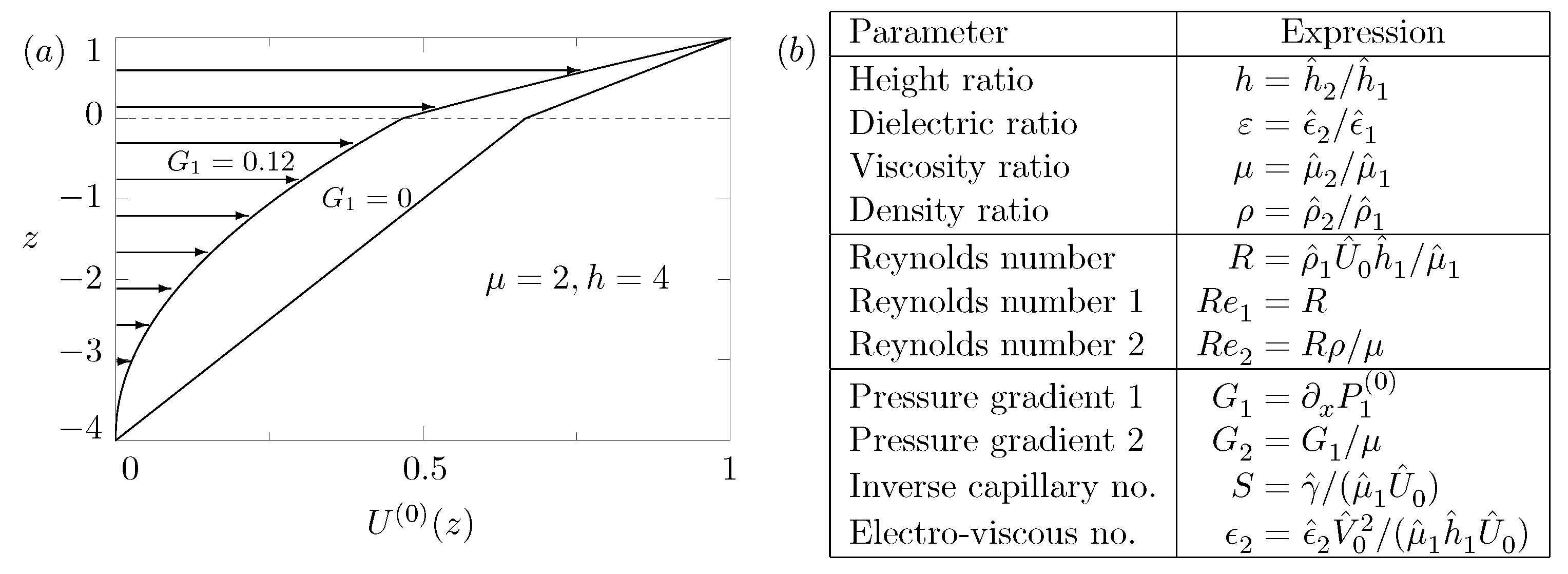
3.1. Velocity Field to Zeroth Order in (The Unperturbed Flow)
3.2. Electric Potentials to Zeroth Order in (The Unperturbed Electric Potentials)
3.3. Velocity Field to First Order in
3.4. Electric Potentials to First Order in
3.5. Boundary Conditions
- BC1–BC4: no-slip conditions at the rigid boundaries:where, as before, primes denote .
- BC5: continuity of W at the interface
- BC7: continuity of tangential stresses at the interfacewhere use is made of the fact that at the interface of two perfect dielectrics, tangential electric stresses are always continuous:due to Equations (13c) and (13d). The remaining tangential viscous stresses of Equation (13e) givewhich becomes Equation (58).
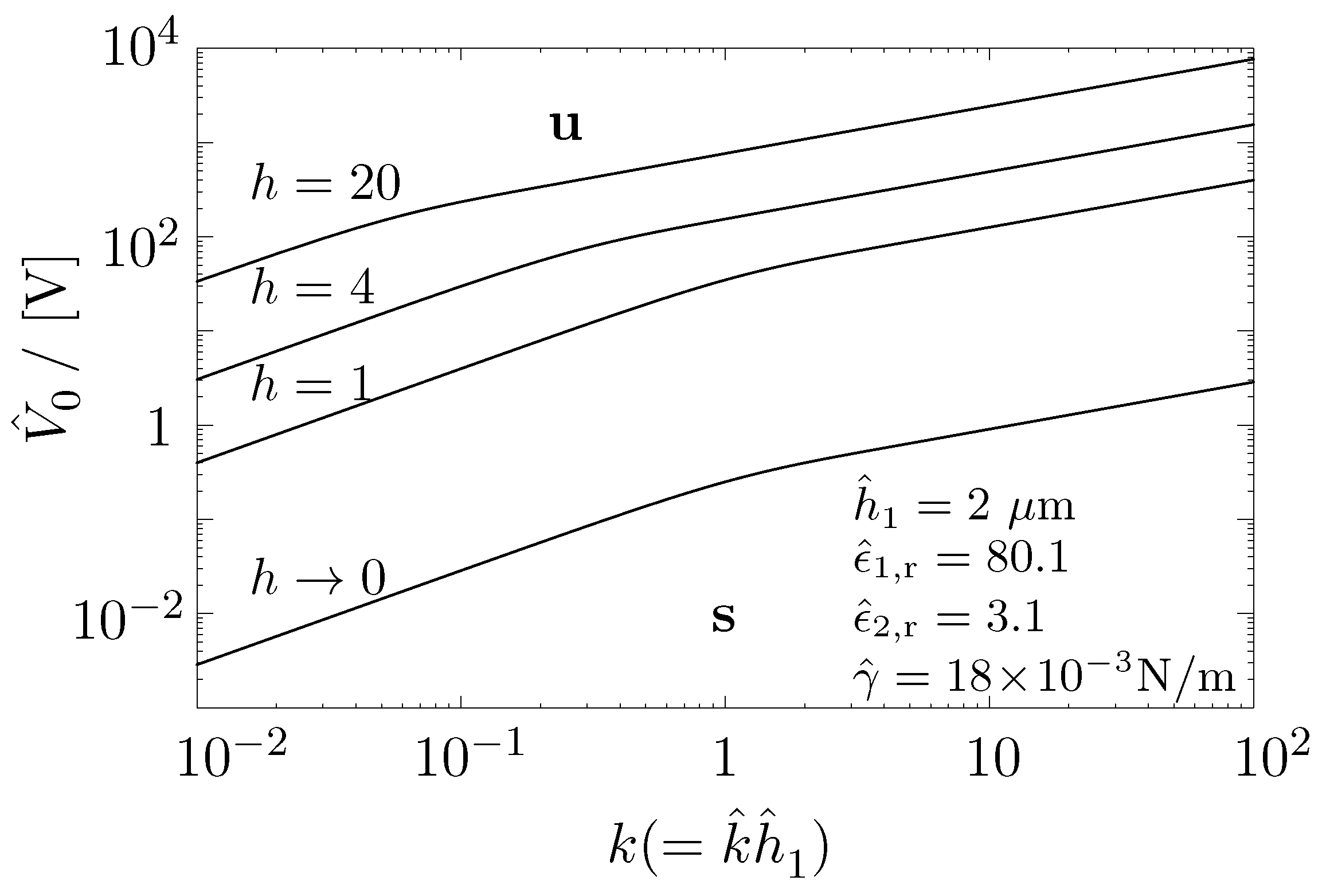
- BC8: balance of normal stresseswhich is found by linearizing Equation (13e) and making use of Equation (44a). In Equation (60), is the density ratio of Equation (21), and the nondimensional number Sis the inverse of the capillary number and gives the normal-stress contribution due to the surface tension . is given byand gives the normal-stress contributions of the applied electric fields, which are found using Equations (5), (39a), (39b), (52a), and (52b),Note that the effective nondimensional values of in the case of the normal E-field, and of in the case of the tangential E-field, in dimensional units correspond to and , respectively. Equations (62) and (63b) were derived here for our bounded system, but recover known results when (one of the) boundaries effectively go to infinity ().
4. Perturbation Expansion in the Reynolds Number to Zeroth Order

4.1. Validation of Results: Limit of Vanishingly Small Wavenumbers
4.2. Validation of Results: Limit of Large Wavenumbers
4.3. Onset of EHD Instability to Zeroth Order in R
5. Perturbation Expansion in the Reynolds Number to First Order
5.1. Pure Shear Stress Instability to First Order in R

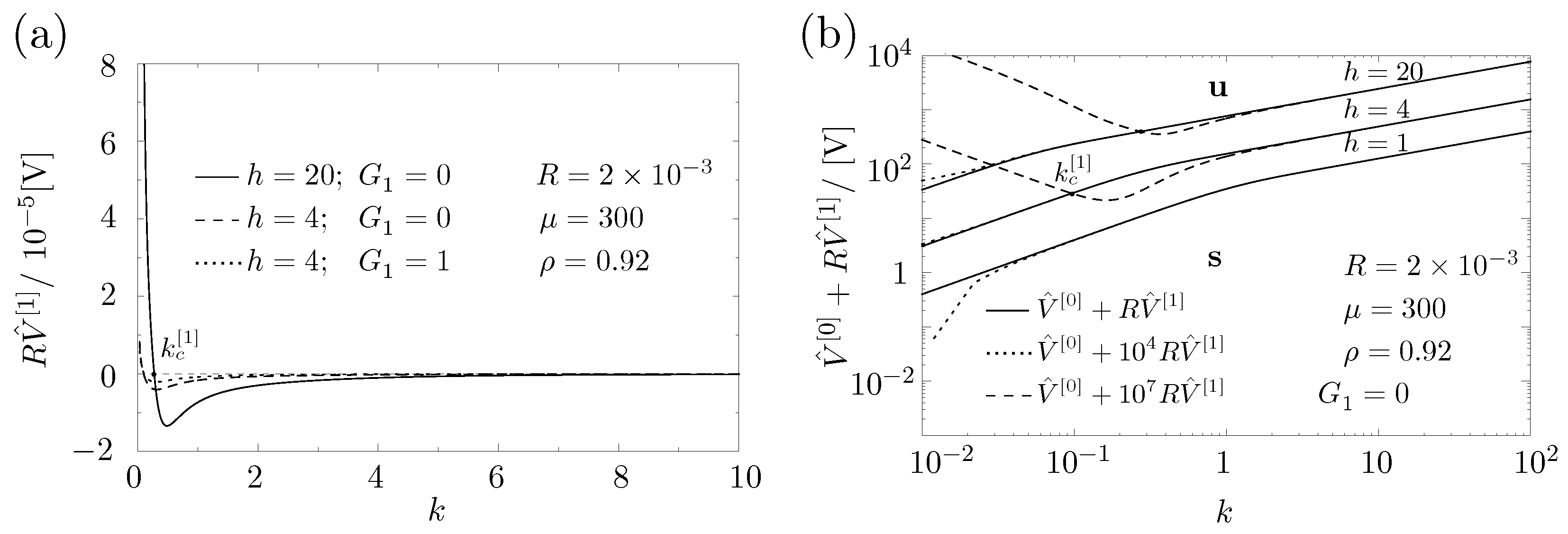
5.2. Onset of EHD Instability to First Order in R
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Coefficients for and
Appendix B. Coefficients for and
Appendix C. Phase Velocity c[1]
References
- Melcher, J.R. Field-Coupled Surface Waves: A Comparative Study of Surface-Coupled Electrohydrodynamic and Magnetohydrodynamic Waves; M.I.T. Press: Cambridge, MA, USA, 1963. [Google Scholar]
- Melcher, J.R.; Smith, C.V., Jr. Electrohydrodynamic charge relaxation and interfacial perpendicular-field instability. Phys. Fluids 1969, 12, 778. [Google Scholar] [CrossRef]
- Melcher, J.R.; Taylor, G. I Electrohydrodynamics: A review of the role of interfacial shear stresses. Annu. Rev. Fluid Mech. 1969, 1, 111. [Google Scholar] [CrossRef]
- Kath, G.S.; Hoburg, J.F. Interfacial EHD instability in normal electric fields. Phys. Fluids 1977, 20, 912. [Google Scholar] [CrossRef]
- Castellanos, A.; González, A. Interfacial electrohydrodynamic instability: The Kath and Hoburg model revisited. Phys. Fluids A 1992, 4, 1307. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Elshehawey, E.F. Nonlinear electrohydrodynamic Rayleigh-Taylor instability. Part 1. A perpendicular field in the absence of surface charges. J. Fluid. Mech. 1983, 129, 473. [Google Scholar] [CrossRef]
- Saville, D.A. Electrohydrodynamics: The Taylor-Melcher Leaky dielectric Model. Annu. Rev. Fluid Mech. 1997, 29, 27. [Google Scholar] [CrossRef]
- Melcher, J.R.; Schwarz, W.J., Jr. Interfacial relaxation overstability in a tangential electric field. Phys. Fluids 1968, 11, 2604. [Google Scholar] [CrossRef]
- Hooper, A.P.; Boyd, W.G.C. Shear-flow instability at the interface between two viscous fluids. J. Fluid Mech. 1983, 128, 507–528. [Google Scholar] [CrossRef]
- Joseph, D.D.; Renardy, Y. Fundamentals of Two-Fluid Dynamics, Part I: Mathematical Theory and Applications; Springer: New York, NY, USA, 1993. [Google Scholar]
- Pozrikidis, C. Instability of two-layer creeping flow in a channel with parallel-sided walls. J. Fluid Mech. 1997, 351, 139. [Google Scholar] [CrossRef]
- Yiang, W.Y.; Helenbrook, B.; Lin, S.P. Inertialess instability of a two-layer liquid film flow. Phys. Fluid 2004, 16, 652. [Google Scholar]
- Yiantsios, S.; Higgins, B.G. Linear stability of plane Poiseuille flow of two superposed fluids. Phys. Fluid 1988, 31, 3225–3238. [Google Scholar] [CrossRef]
- Yih, C.-S. Instability due to viscosity stratification. J. Fluid Mech. 1967, 27, 337–352. [Google Scholar] [CrossRef]
- Eldabe, N.T.M. Electrohydrodynamic stability of two superposed elasticoviscous liquids in plane Couette flow. J. Math. Phys. 1987, 28, 2791–2800. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Elshehawey, E.F.; El-Sayed, M.F. Electrohydrodynamic stability of two superposed viscous fluids. J. Coll. Interf. Sci. 1995, 169, 65. [Google Scholar] [CrossRef]
- Ozen, O.; Aubry, N.; Papageorgiu, D.T.; Petropoulos, P.G. Electrohydrodynamic linear stability of two immiscible fluids in channel flow. Electrochim. Acta 2006, 51, 5316–5323. [Google Scholar] [CrossRef]
- Jensen, M.J.; Goranović, G.; Bruus, H. The clogging pressure of bubbles in hydrophilic channel contractions . J. Micromech. Microeng. 2004, 14, 876–883. [Google Scholar] [CrossRef]
- Bruus, H. Theoretical Microfluidics; Oxford University Press: Oxford, UK, 2008. [Google Scholar]
- Brask, A.; Goranović, G.; Jensen, M.J.; Bruus, H. A novel electro-osmotic pump design for nonconducting liquids: Theoretical analysis of flow rate-pressure characteristics and stability. J. Micromech. Microeng. 2005, 15, 883. [Google Scholar] [CrossRef]
- Goranović, G.; Sørensen, M.P.; Brøns, M.; Bruus, H. Electrohydrodynamic stability of two-phase microflows. In Proceedings of the μTAS 2004 8th International Conference on Miniaturized Systems for Chemistry and Life Sciences, Malmö, Sweden, 26–30 September 2004; Laurell, T., Nilsson, J., Jensen, K., Harrison, J., Kutter, J.P., Eds.; Royal Society of Chemistry: Cambridge, UK, 2004; Volume 1, ISBN 0-85404-896-0. 617p. [Google Scholar]
- Wolfram, S. 2024. Available online: https://www.wolfram.com/mathematica/ (accessed on 1 February 2024).
- Mestel, A.J. Electrohydrodynamic stability of a slightly viscous jet. J. Fluid Mech. 1994, 274, 93. [Google Scholar] [CrossRef]
- Landau, L.D.; Lifshitz, E.M. Electrodynamics of Continuous Media, 2nd ed.; Volume 8 of Course in Theoretical Physics; Butterworth–Heinemann: Oxford, UK, 2004. [Google Scholar]
- Haus, H.A.; Melcher, J.R. Electromagnetic Fields and Energy; Prentice Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Landau, L.D.; Lifshitz, E.M. Fluid Mechanics, 2nd ed.; Volume 6 of Course of Theoretical Physics; Butterworth–Heinemann: Oxford, UK, 1987. [Google Scholar]
- Jackson, J.D. Classical Electrodynamics, 2nd ed.; John Wiley and Sons: New York, NY, USA, 1975. [Google Scholar]
- Squire, H.B. On the stability for three-dimensional disturbances of viscous fluid flow between parallel walls. Proc. Roy. Soc. A 1933, 142, 621. [Google Scholar]
- Yih, C.-S. Stability of two-dimensional parallel flows for three-dimensional disturbances. Quart. Appl. Math. 1955, 12, 434. [Google Scholar] [CrossRef]
- Nayfeh, A. Perturbation Methods; John Wiley and Sons: New York, NY, USA, 1973. [Google Scholar]
- Yih, C.-S. Stability of liquid flow down an inclined plane. Phys. Fluid 1963, 6, 321. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goranović, G.; Sørensen, M.P.; Bruus, H.; Brøns, M. Electrohydrodynamic (In)Stability of Microfluidic Channel Flows: Analytical Expressions in the Limit of Small Reynolds Number. Water 2024, 16, 544. https://doi.org/10.3390/w16040544
Goranović G, Sørensen MP, Bruus H, Brøns M. Electrohydrodynamic (In)Stability of Microfluidic Channel Flows: Analytical Expressions in the Limit of Small Reynolds Number. Water. 2024; 16(4):544. https://doi.org/10.3390/w16040544
Chicago/Turabian StyleGoranović, Goran, Mads Peter Sørensen, Henrik Bruus, and Morten Brøns. 2024. "Electrohydrodynamic (In)Stability of Microfluidic Channel Flows: Analytical Expressions in the Limit of Small Reynolds Number" Water 16, no. 4: 544. https://doi.org/10.3390/w16040544
APA StyleGoranović, G., Sørensen, M. P., Bruus, H., & Brøns, M. (2024). Electrohydrodynamic (In)Stability of Microfluidic Channel Flows: Analytical Expressions in the Limit of Small Reynolds Number. Water, 16(4), 544. https://doi.org/10.3390/w16040544