

Evaluation of a Coupled CFD and Multi-Body Motion Model for Ice-Structure Interaction Simulation



Abstract
1. Introduction
2. Methodology
2.1. Test Cases
2.2. Numerical Methods
2.3. Numerical Model Setup
- -
- Pressure Correction Schemes: These schemes adjust the pressure field to ensure the flow remains incompressible.
- -
- Implicit and Explicit Methods: Depending on the scenario, the current numerical model employs either implicit or explicit time-stepping methods. Implicit methods are typically more stable and allow for larger time steps, though they require more computational effort.
- -
- Adaptive Time-Stepping Approach: The software dynamically adjusts the time step size based on the flow conditions, enhancing both stability and accuracy.
2.4. Numerical Model Evaluation
3. Results and Discussion
3.1. Ability to Simulate Ice-Structure Interactions
3.2. Accuracy of Simulations
3.3. Computational Efficiency
4. Conclusions
- -
- The current numerical model which is a structured mesh-based model, has a user-friendly graphical interface that can model a wide range of hydraulic problems, which is its primary advantage. On the other hand, meshless methods are particularly well-suited for handling complex conditions without the need for a predefined grid, offering greater flexibility in defining material properties and setting up simulations with high accuracy, such as simulating the jamming of blocks behind an ICS. However, these methods can be more challenging to configure. Moreover, meshless models often make more efficient use of computational resources by leveraging GPU acceleration, in contrast to commercial software like the current numerical model, which is typically constrained to CPU processing and the number of cores available under the license. For instance, the computational time for TC25 using a meshless method, as conducted by Billy et al. [33] was approximately 1.5 h, compared to nearly 33 h required by the current numerical model.
- -
- Comparing the qualitative results through the snapshots of the current numerical model and the laboratory TC shows that the current numerical model can accurately capture the main features of the dam breaking, such as the reverse wave and the breaking of the reverse wave. Additionally, the current numerical model produces acceptable results when adding complexity to the cases, such as incorporating floating blocks, increasing the downstream water level, and adding ICS to the tank.
- -
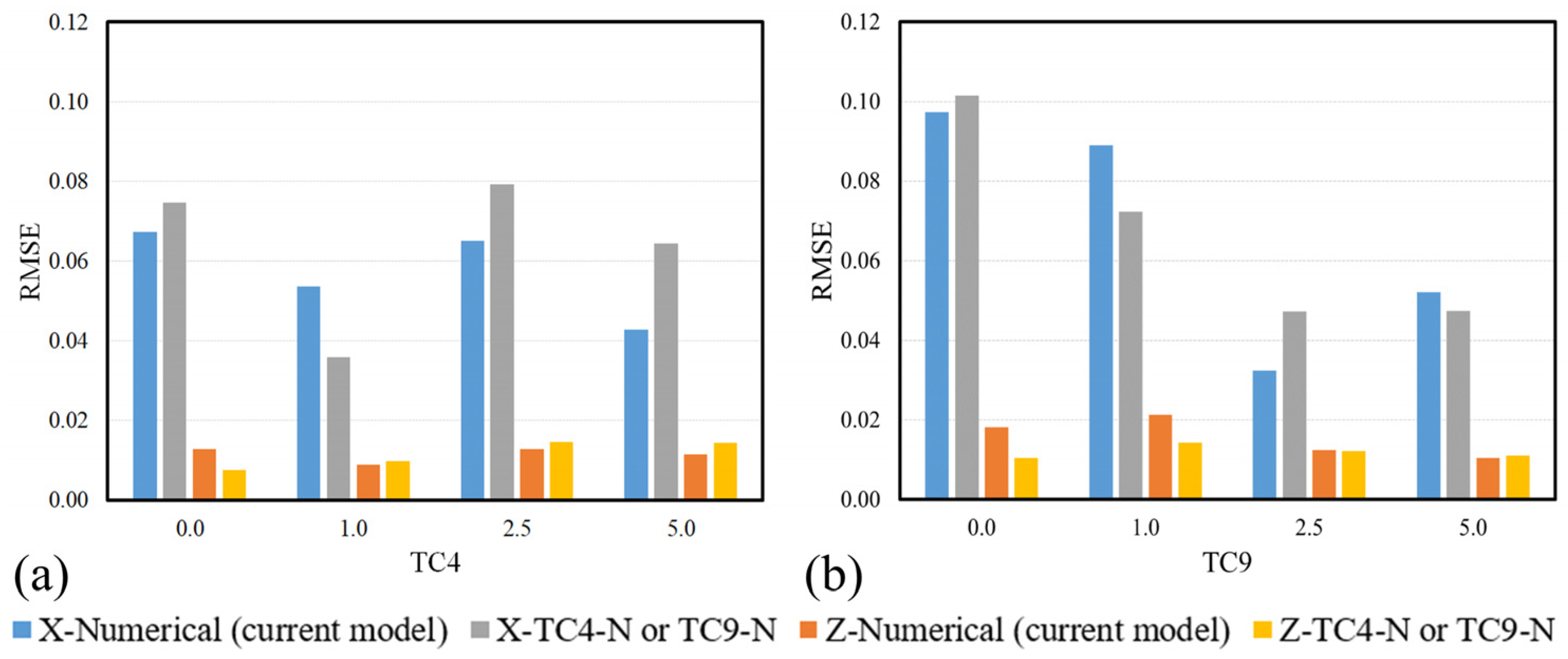
- The results also indicated that the current numerical model could accurately reproduce the movement of blocks in simple dam break cases with varying numbers of blocks and downstream water levels, both with and without an ICS. An RMSE of 0.0418 and 0.0527 was obtained for the current numerical model when dealing with 4 and 9 blocks with different downstream water levels, respectively.
- -
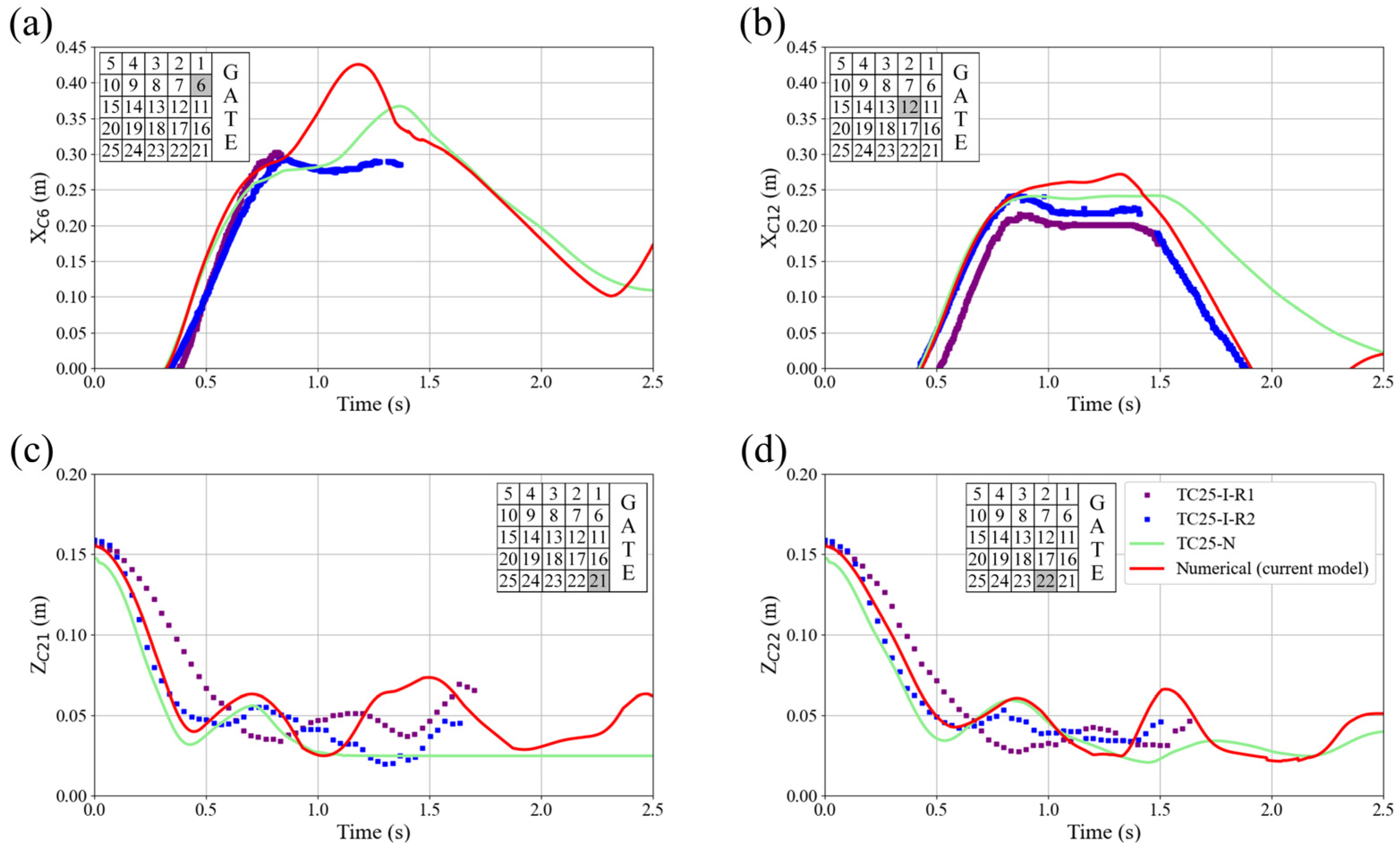
- For the 25 blocks cases with an ICS, the current numerical model showed an RMSE of 0.0441 and 0.0753, for the real and artificial ice blocks, respectively. The lower accuracy is due to the jamming of the block downstream of the ICS when the reverse wave comes back from the upstream wall of the tank. Moreover, the simulation accuracy of real ice blocks (RMSE) is enhanced compared to artificial blocks, therefore, it is essential to define the material properties correctly to obtain correct results, especially in real ice simulations.
- -
- In general, both, the current numerical model and the meshless models were more accurate in reproducing the trajectory of blocks in the z-direction compared to the x-direction. Nevertheless, the current numerical model was slightly more accurate with an average overall RMSE of 0.0534 from all cases (and directions), compared to an average RMSE of 0.0599 for the meshless models.
- -
- Although the current numerical model exhibited a similar computational time (ranging from 25 to 40 h for 3 s of physical time) to the particle method numerical model conducted by Amaro et al. [31], constraints on the number of cores available for use by the processors (depending on the license type) and reliance on CPU processing resulted in greater resource consumption.
- -
- The use of sophisticated mesh techniques, such as nested meshes, not only reduced computational time but also diminished the accuracy of the results. Therefore, a single mesh block was recommended based on the recommendations of the software manual. Like other mesh-based methods, refining the mesh in the current numerical model could enhance accuracy but increases computational time.
- -
- The current numerical model did not converge and became unstable when dealing with more complex phenomena, such as jamming several blocks behind an ICS in a straight channel. This problem could be related to numerous factors, including the chaotic nature of the phenomena, the embedded collision model, the coupling of the solid and fluid phases, among others. These aspects are suggested topics for future investigation.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Perham, R.E. Ice Sheet Retention Structures; Cold Regions Research and Engineering Lab: Hanover, NH, USA, 1983. [Google Scholar]
- Tuthill, A.M. Structural Ice Control: Review of Existing Methods; Cold Regions Research & Engineering Laboratory, U.S. Army Corps of Engineers: Hanover, NH, USA, 1995. [Google Scholar]
- Beltaos, S. Progress in the Study and Management of River Ice Jams. Cold Reg. Sci. Technol. 2008, 51, 2–19. [Google Scholar] [CrossRef]
- Hicks, F.E. An Introduction to River Ice Engineering: For Civil Engineers and Geoscientists; CreateSpace Independent Publishing Platform: Charleston, SC, USA, 2016; ISBN 978-1-4927-8863-8. [Google Scholar]
- Beltaos, S. Hydrodynamic Characteristics and Effects of River Waves Caused by Ice Jam Releases. Cold Reg. Sci. Technol. 2013, 85, 42–55. [Google Scholar] [CrossRef]
- Benin, W.J.; Ghobrial, T.; Pourshahbaz, H.; Pierre, A. Characterization of Ice Retention during Breakup Upstream of an Ice Control Structure Using a Juxtaposed Camera System. In Proceedings of the 27th IAHR International Symposium on Ice, Gdańsk, Poland, 9–13 June 2024. [Google Scholar]
- Pourshahbaz, H.; Ghobrial, T.; Shakibaeinia, A. Field Monitoring of River Ice Processes in the Vicinity of Ice Control Structures in the Province of Quebec, Canada. Can. J. Civ. Eng. 2024, 51, 200–214. [Google Scholar] [CrossRef]
- Ouranos. Vers L’adaptation Synthèse des Connaissances sur les Changements Climatiques au Québec; Ouranos: Montreal, QC, Canada, 2015; ISBN 978-2-923292-18-2. [Google Scholar]
- Lafleur, C.; Nolin, S.; Pelletier, P.; Babineau, L. Understanding, Monitoring and Preventing Ice-Jam Flooding on an Urban River in the Quebec City Area. In Proceedings of the 21st Workshop on the Hydraulics of Ice Covered Rivers, Saskatoon, SK, Canada, 29 August–1 September 2021; p. 12. [Google Scholar]
- Lever, J.H.; Gooch, G. Performance of a Sloped-Block Ice-Control Structure in Hardwick, VT. In Proceedings of the 13th Workshop on the Hydraulics of Ice Covered Rivers, Hanover, NH, USA, 15–16 September 2005; p. 7. [Google Scholar]
- Lever, J.H.; Gooch, G. Cazenovia Creek Ice Control Structure: A Comparison of Two Concepts. In Proceedings of the 10th Workshop on the Hydraulics of Ice Covered Rivers, Winnipeg, MB, Canada, 8–11 June 1999. [Google Scholar]
- Lever, J.H.; Gooch, G. Design of Cazenovia Creek Ice Control Structure. J. Cold Reg. Eng. 2001, 15, 103–124. [Google Scholar] [CrossRef]
- Kolerski, T.; Shen, H.T.; Liu, L. DynaRICE Modeling to Assess the Performance of an Ice Control Structure on the Lower Grasse River. In Proceedings of the 19th IAHR International Symposium on Ice, Vancouver, BC, Canada, 6–11 July 2008. [Google Scholar]
- Carr, M.; Tuthill, A.M.; Vuyovich, C.M. Dam Removal Ice Hydraulic Analysis and Ice Control Alternatives. In Proceedings of the 16th Workshop on River Ice, Winnipeg, MB, Canada, 18–22 September 2011. [Google Scholar]
- Nolin, S.; Pelletier, P.; Groux, F. Modelling the Impacts of Dam Rehabilitation on River Ice Jam: A Case Study on the Matane River, QC, Canada. In Proceedings of the 19th Workshop on the Hydraulics of Ice Covered Rivers, Whitehorse, YT, Canada, 9–12 July 2017; p. 12. [Google Scholar]
- Hatta, M.P.; Widyastuti, I.; Makkarumpa, A.M.M. The Effect of Triangle Slope Variation on Froude Number with Numerical Simulation. Civ. Eng. J. 2023, 9, 3136–3146. [Google Scholar] [CrossRef]
- Pu, J.H.; Wallwork, J.T.; Khan, M.A.; Pandey, M.; Pourshahbaz, H.; Satyanaga, A.; Hanmaiahgari, P.R.; Gough, T. Flood Suspended Sediment Transport: Combined Modelling from Dilute to Hyper-Concentrated Flow. Water 2021, 13, 379. [Google Scholar] [CrossRef]
- U.S. Army Corps of Engineers HEC-RAS River Analysis System. Hydraulic Reference Manual, Version 5.0; Institute of Water Resources, Hydrologic Engineering Center: Davis, CA, USA, 2016.
- Shen, H.T.; Wang, D.S.; Lal, A.M.W. Numerical Simulation of River Ice Processes. J. Cold Reg. Eng. 1995, 9, 107–118. [Google Scholar] [CrossRef]
- Lindenschmidt, K.-E. RIVICE—A Non-Proprietary, Open-Source, One-Dimensional River-Ice Model. Water 2017, 9, 314. [Google Scholar] [CrossRef]
- Shen, H.T.; Su, J.; Liu, L. SPH Simulation of River Ice Dynamics. J. Comput. Phys. 2000, 165, 752–770. [Google Scholar] [CrossRef]
- Shen, H.T. Mathematical Modeling of River Ice Processes. Cold Reg. Sci. Technol. 2010, 62, 3–13. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D.L. A Discrete Numerical Model for Granular Assemblies. Géotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Tuhkuri, J.; Polojärvi, A. A Review of Discrete Element Simulation of Ice–Structure Interaction. Phil. Trans. R. Soc. A 2018, 376, 20170335. [Google Scholar] [CrossRef] [PubMed]
- Daly, S.; Hopkins, M. Estimating Forces on an Ice Control Structure Using DEM. In Proceedings of the 11th Workshop on the Hydraulics of Ice Covered Rivers, Ottawa, ON, Canada, 8–10 November 2001. [Google Scholar]
- Hopkins, M.A.; Tuthill, A.M. Ice Boom Simulations and Experiments. J. Cold Reg. Eng. 2002, 16, 138–155. [Google Scholar] [CrossRef]
- Gingold, R.A.; Monaghan, J.J. Smoothed Particle Hydrodynamics: Theory and Application to Non-Spherical Stars. Mon. Not. R. Astron. Soc. 1977, 181, 375–389. [Google Scholar] [CrossRef]
- Koshizuka, S.; Oka, Y. Moving-Particle Semi-Implicit Method for Fragmentation of Incompressible Fluid. Nucl. Sci. Eng. 1996, 123, 421–434. [Google Scholar] [CrossRef]
- Sun, X.; Sakai, M.; Yamada, Y. Three-Dimensional Simulation of a Solid–Liquid Flow by the DEM–SPH Method. J. Comput. Phys. 2013, 248, 147–176. [Google Scholar] [CrossRef]
- Canelas, R.B.; Crespo, A.J.C.; Domínguez, J.M.; Ferreira, R.M.L.; Gómez-Gesteira, M. SPH–DCDEM Model for Arbitrary Geometries in Free Surface Solid–Fluid Flows. Comput. Phys. Commun. 2016, 202, 131–140. [Google Scholar] [CrossRef]
- Amaro, R.A.; Mellado-Cusicahua, A.; Shakibaeinia, A.; Cheng, L.-Y. A Fully Lagrangian DEM-MPS Mesh-Free Model for Ice-Wave Dynamics. Cold Reg. Sci. Technol. 2021, 186, 103266. [Google Scholar] [CrossRef]
- Billy, C.; Shakibaeinia, A.; Jandaghian, M.; Taha, W.; Lokhmanets, I.; Carbonneau, A.S.; Larouche, M.-E. Three-Dimensional Fully Lagrangian Continuum-Discrete Modeling of River Ice Jam Formation. In Proceedings of the 26th IAHR International Symposium on Ice, Montreal, QC, Canada, 19–23 June 2022. [Google Scholar]
- Billy, C.; Shakibaeinia, A.; Ghobrial, T. Three-Dimensional Fully-Lagrangian DEM-SPH Modeling of River Ice Interaction with Control Structures. Cold Reg. Sci. Technol. 2023, 214, 103939. [Google Scholar] [CrossRef]
- Finlayson, B.A. Numerical Methods for Problems with Moving Fronts; Ravenna Park Publishing, Inc.: Seattle, WA, USA, 1992; ISBN 978-0-9631765-0-9. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of Fluid (VOF) Method for the Dynamics of Free Boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Pourshahbaz, H.; Abbasi, S.; Taghvaei, P. Numerical Scour Modeling around Parallel Spur Dikes in FLOW-3D. Drink. Water Eng. Sci. Discuss. 2017, 1–16. [Google Scholar] [CrossRef]
- Pourshahbaz, H.; Abbasi, S.; Pandey, M.; Pu, J.H.; Taghvaei, P.; Tofangdar, N. Morphology and Hydrodynamics Numerical Simulation around Groynes. ISH J. Hydraul. Eng. 2022, 28, 53–61. [Google Scholar] [CrossRef]
- Choufu, L.; Abbasi, S.; Pourshahbaz, H.; Taghvaei, P.; Tfwala, S. Investigation of Flow, Erosion, and Sedimentation Pattern around Varied Groynes under Different Hydraulic and Geometric Conditions: A Numerical Study. Water 2019, 11, 235. [Google Scholar] [CrossRef]
- Safari Ghaleh, R.; Aminoroayaie Yamini, O.; Mousavi, S.H.; Kavianpour, M.R. Numerical Modeling of Failure Mechanisms in Articulated Concrete Block Mattress as a Sustainable Coastal Protection Structure. Sustainability 2021, 13, 12794. [Google Scholar] [CrossRef]
- Wei, G. A Fixed-Mesh Method for General Moving Objects in Fluid Flow. Mod. Phys. Lett. B 2005, 19, 1719–1722. [Google Scholar] [CrossRef]
- Wang, P.; Ji, C.; Sun, X.; Xu, D.; Ying, C. Development and Test of FDEM–FLOW-3D—A CFD–DEM Model for the Fluid–Structure Interaction of AccropodeTM Blocks under Wave Loads. Ocean. Eng. 2024, 303, 117735. [Google Scholar] [CrossRef]
- Pourshahbaz, H.; Ghobrial, T.; Shakibaeinia, A. Evaluating a CFD Model for Three-Dimensional Simulation of Ice Structure Interaction. In Proceedings of the 22nd Workshop on the Hydraulics of Ice Covered Rivers, Canmore, AB, Canada, 9–12 July 2023. [Google Scholar]
- Healy, D.; Hicks, F.E. Experimental Study of Ice Jam Formation Dynamics. J. Cold Reg. Eng. 2006, 20, 117–139. [Google Scholar] [CrossRef]
- Lucie, C.; Nowroozpour, A.; Ettema, R. Ice Jams in Straight and Sinuous Channels: Insights from Small Flumes. J. Cold Reg. Eng. 2017, 31, 04017006. [Google Scholar] [CrossRef]
- Wang, J.; Hua, J.; Chen, P.; Sui, J.; Wu, P.; Whitcombe, T. Initiation of Ice Jam in Front of Bridge Piers—An Experimental Study. J. Hydrodyn. 2019, 31, 117–123. [Google Scholar] [CrossRef]
- Flow Science, Inc. FLOW-3D® Version 12.0 Users Manual; Flow Sciences Inc.: Santa Fe, NM, USA, 2018. [Google Scholar]
- Goldstein, H.; Poole, C.P.; Safko, J. Classical Mechanics, 3rd ed.; Addison-Wesley: Washington, DC, USA, 2002; ISBN 978-0-201-65702-9. [Google Scholar]
- Wei, G. An Implicit Method to Solve Problems of Rigid Body Motion Coupled with Fluid Flow; Flow Science Inc.: Santa Fe, NM, USA, 2006. [Google Scholar]
- Stronge, W.J. Impact Mechanics; Cambridge University Press: Cambridge, UK, 2018; ISBN 978-0-521-84188-7. [Google Scholar]
- Mirtich, B.V. Impulse-Based Dynamic Simulation of Rigid Body Systems; University of California: Berkeley, CA, USA, 1996. [Google Scholar]
- Wei, G. Three-Dimensional Collision Modeling for Rigid Bodies and Its Coupling with Fluid Flow Computation. 2006. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=3b7717ab7d887e0677ccc604fd0a2d5161bc3973 (accessed on 1 July 2024).
- Morozova, T.I.; García, N.A.; Barrat, J.-L. Temperature Dependence of Thermodynamic, Dynamical, and Dielectric Properties of Water Models. J. Chem. Phys. 2022, 156, 126101. [Google Scholar] [CrossRef]
- Ashby, S.F.; Manteuffel, T.A.; Saylor, P.E. A Taxonomy for Conjugate Gradient Methods. SIAM J. Numer. Anal. 1990, 27, 1542–1568. [Google Scholar] [CrossRef]
- Saad, Y. Iterative Methods for Sparse Linear Systems; PWS Publishing Company: Belmont, CA, USA, 1996; ISBN 978-0-534-94776-7. [Google Scholar]
- Pandey, M.; Pu, J.H.; Pourshahbaz, H.; Khan, M.A. Reduction of Scour around Circular Piers Using Collars. J. Flood Risk Manag. 2022, 15, e12812. [Google Scholar] [CrossRef]
- Taghvaei, P.; Pourshahbaz, H.; Pu, J.H.; Pandey, M.; Pourshahbaz, V.; Abbasi, S.; Tofangdar, N. Semi-Analytical Solution of Solute Dispersion Model in Semi-Infinite Media. ZAMM J. Appl. Math. Mech./Z. Für Angew. Math. Und Mech. 2022, 102, e202000271. [Google Scholar] [CrossRef]
- Khan, M.A.; Sharma, N.; Aamir, M.; Pandey, M.; Garg, R.; Pourshahbaz, H. Chapter 27-The Hole Size Analysis of Bursting Events around Mid-Channel Bar Using the Conditional Method Approach. In Current Directions in Water Scarcity Research; Zakwan, M., Wahid, A., Niazkar, M., Chatterjee, U., Eds.; Water Resource Modeling and Computational Technologies; Elsevier: Amsterdam, The Netherlands, 2022; Volume 7, pp. 483–495. [Google Scholar]
- Stansby, P.K.; Chegini, A.; Barnes, T.C.D. The Initial Stages of Dam-Break Flow. J. Fluid. Mech. 1998, 374, 407–424. [Google Scholar] [CrossRef]
- Jánosi, I.M.; Jan, D.; Szabó, K.G.; Tél, T. Turbulent Drag Reduction in Dam-Break Flows. Exp. Fluids 2004, 37, 219–229. [Google Scholar] [CrossRef]
- Wei, Z.; Li, C.; Dalrymple, R.A.; Derakhti, M.; Katz, J. Chaos in Breaking Waves. Coast. Eng. 2018, 140, 272–291. [Google Scholar] [CrossRef]
- Canelas, R.B.; Brito, M.; Feal, O.G.; Domínguez, J.M.; Crespo, A.J.C. Extending DualSPHysics with a Differential Variational Inequality: Modeling Fluid-Mechanism Interaction. Appl. Ocean. Res. 2018, 76, 88–97. [Google Scholar] [CrossRef]
- Domínguez, J.M.; Fourtakas, G.; Altomare, C.; Canelas, R.B.; Tafuni, A.; García-Feal, O.; Martínez-Estévez, I.; Mokos, A.; Vacondio, R.; Crespo, A.J.C.; et al. DualSPHysics: From Fluid Dynamics to Multiphysics Problems. Comp. Part. Mech. 2022, 9, 867–895. [Google Scholar] [CrossRef]
- Dagum, L.; Menon, R. OpenMP: An Industry Standard API for Shared-Memory Programming. IEEE Comput. Sci. Eng. 1998, 5, 46–55. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Case Definition | Dam Break with 4 Blocks with Different Downstream Water Level (Source: Amaro et al. [31]) | Dam Break with 9 Blocks with Different Downstream Water Level (Source: Amaro et al. [31]) | Dam Break with ICS and 25 Blocks with Different Material (Source: Billy et al. [33]) | ||
|---|---|---|---|---|---|
| Test case ID | TC4 | TC9 | TC25 | ||
| Test cases scenarios ID | TC4-0.0: 0.0 cm downstream water depth TC4-1.0: 1.0 cm downstream water depth TC4-2.5: 2.5 cm downstream water depth TC4-5.0: 5.0 cm downstream water depth | TC9-0.0: 0.0 cm downstream water depth TC9-1.0: 1.0 cm downstream water depth TC9-2.5: 2.5 cm downstream water depth TC9-5.0: 5.0 cm downstream water depth | TC25-I: 25 real ice blocks TC25-PP: 25 Polypropylene (PP) blocks | ||
| Upstream water depth (Hup) (cm) | 15 | ||||
| Downstream water depth (Hdo) (cm) | 0.0, 1.0, 2.5, 5.0 | 2.5 | |||
| Compared numerical model/method | MPARS DEM-MPS | DualSPHysics DEM-SPH | |||
| Blocks | Material | PP | PP | PP | real ice |
| Number | 4 | 9 | 25 | 25 | |
| Dimensions Length × width × height (cm) | 7.25 × 7.25 × 1.95 ± 0.06 | 4.8 × 4.8 × 1.95 ± 0.06 | 4.6 × 4.6 × 0.9 | 4.7 × 4.7 × (1.3 ± 0.2) | |
| Density (ρs) (kg/m3) | 868 | 868 | 900 | 920 | |
| Young Modulus (Es) (GPa) | 3.3 | 3.3 | 3.3 | 6.3 | |
| Poisson Ratio (υs) | 0.4 | 0.4 | 0.4 | 0.3 | |
| Restitution coefficient | 0.68 | 0.68 | 0.68 | 0.2 | |
| static friction coefficient (μs) | 0.412 | 0.412 | 0.412 | 0.1 | |
| Tank | Material | prismatic plexiglass | prismatic plexiglass | prismatic plexiglass | |
| Dimensions Length × width × height (cm) | 70 × 15 × 30 | 70 × 15 × 30 | 100 × 25 × 30 | ||
| Young Modulus (Es) (GPa) | 1 | 1 | 1 | ||
| Poisson Ratio (υs) | 0.37 | 0.37 | 0.37 | ||
| Restitution coefficient | 0.2 | 0.2 | 0.2 | ||
| static friction coefficient (μs) | 0.412 | 0.412 | 0.412 | ||
| Piers (ICS) | Usage | No | No | Yes | |
| Material | - | - | PVC | ||
| Number | - | - | 3 | ||
| Position of ICS from upstream (cm) | - | - | 30 | ||
| Diameter and inter-spacing (cm) | - | - | 3.1/3.75 | ||
| Young Modulus (Es) (GPa) | - | - | 3 | ||
| Poisson Ratio (υs) | - | - | 0.3 | ||
| Restitution coefficient | - | - | 0.6 | ||
| static friction coefficient (μs) | - | - | 0.4 | ||
| Numerical Model | MPARS | FLOW-3D | DualSPHyics | |||
|---|---|---|---|---|---|---|
| Description | Numerical model used by Amaro et al. [31] | Current numerical model | Numerical model used by Billy et al. [33] | |||
| Scenario | TC4 and TC9 | TC4 and TC9 | TC25 | TC25 | ||
| System type | Local computer | Local computer | Local computer | Compute Canada servers | CHLab server | |
| CPU | Intel® Xeon® Processor E5 v2 Family @ 2.80 GHz (Intel Corporation, Santa Clara, CA, USA) | Intel(R) Core(TM) i7-10700 @ 2.90 GHz (Intel Corporation, Santa Clara, CA, USA) | Intel(R) Core(TM) i7 @ 3.60 GHz (Intel Corporation, Santa Clara, CA, USA) | x | Intel(R) Xeon(R) Gold @ 3.00 GHz (Intel Corporation, Santa Clara, CA, USA) | |
| CPU cores | 6 | 8 | 8 | 8 | 14 | 48 |
| GPU | x | x | x | NVIDIA GeForce GT 730 | Tesla V100-SXM2-32GB | NVIDIA Quadro P400 |
| CUDA cores | x | x | x | 384 | 5120 | 3840 |
| Number of particles/cells | ≈1,500,000 | ≈1,800,000 | ≈1,800,000 | 1,797,790 | 1,797,790 | 1,797,790 |
| Run time (h) | ≈30 to 60 | ≈25 to 40 | ≈33 | 23.5 | 10.2 | 1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pourshahbaz, H.; Ghobrial, T.; Shakibaeinia, A. Evaluation of a Coupled CFD and Multi-Body Motion Model for Ice-Structure Interaction Simulation. Water 2024, 16, 2454. https://doi.org/10.3390/w16172454
Pourshahbaz H, Ghobrial T, Shakibaeinia A. Evaluation of a Coupled CFD and Multi-Body Motion Model for Ice-Structure Interaction Simulation. Water. 2024; 16(17):2454. https://doi.org/10.3390/w16172454
Chicago/Turabian StylePourshahbaz, Hanif, Tadros Ghobrial, and Ahmad Shakibaeinia. 2024. "Evaluation of a Coupled CFD and Multi-Body Motion Model for Ice-Structure Interaction Simulation" Water 16, no. 17: 2454. https://doi.org/10.3390/w16172454
APA StylePourshahbaz, H., Ghobrial, T., & Shakibaeinia, A. (2024). Evaluation of a Coupled CFD and Multi-Body Motion Model for Ice-Structure Interaction Simulation. Water, 16(17), 2454. https://doi.org/10.3390/w16172454