
Application of Tesla Valve’s Obstruction Characteristics to Reverse Fluid in Fish Migration


Abstract
1. Introduction
2. Materials and Methods
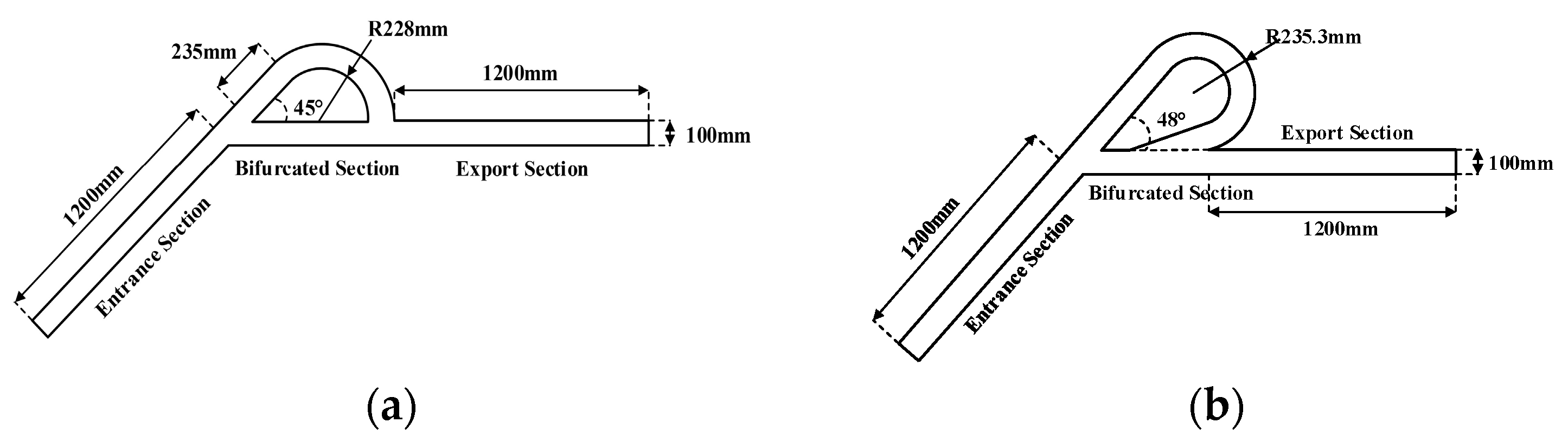
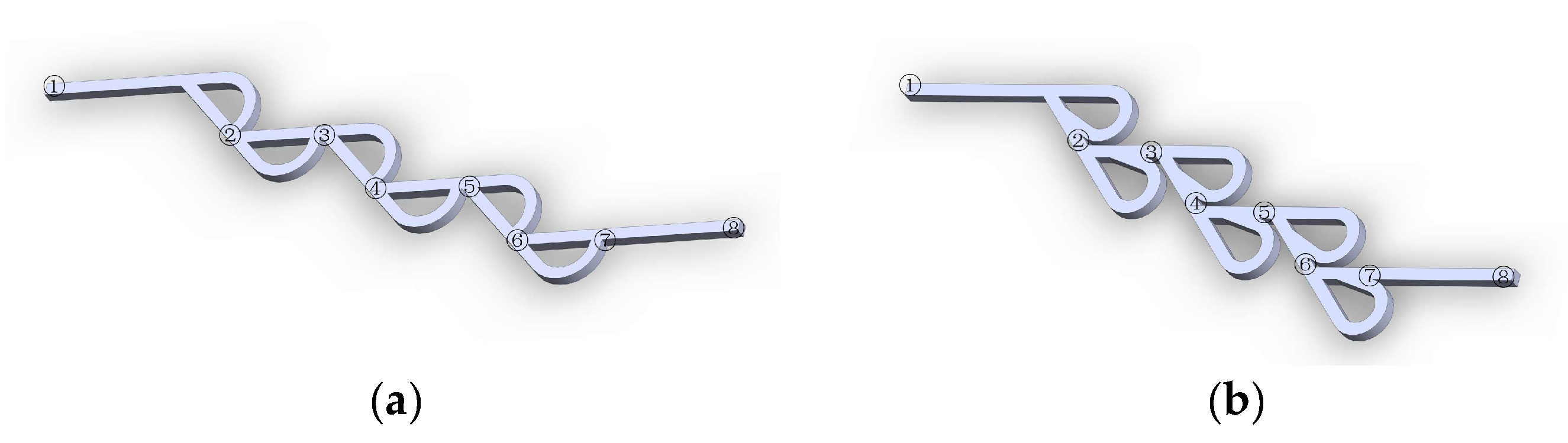
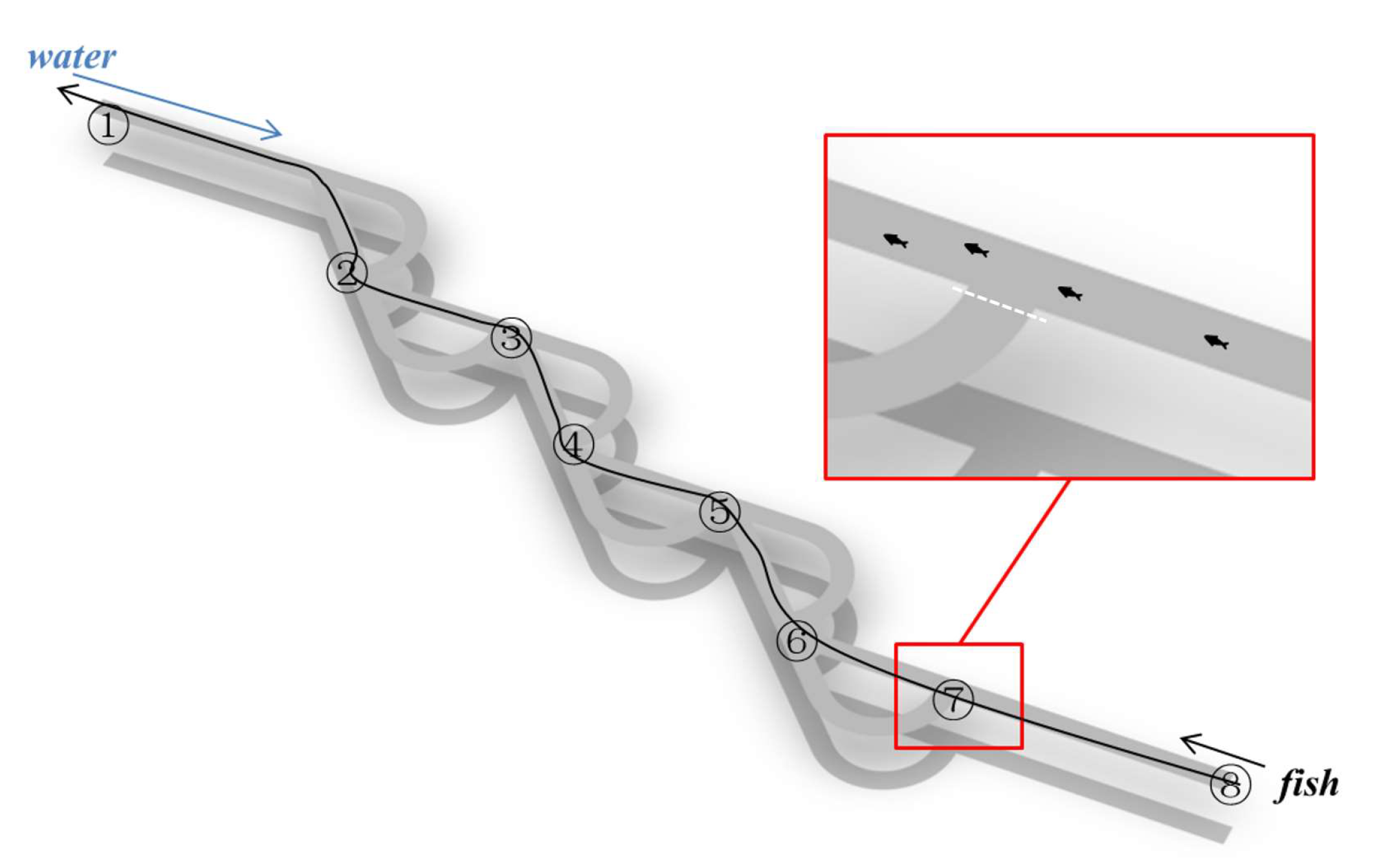
2.1. Physical Model
2.2. Numerical Calculation
2.3. Numerical Calculation Verification
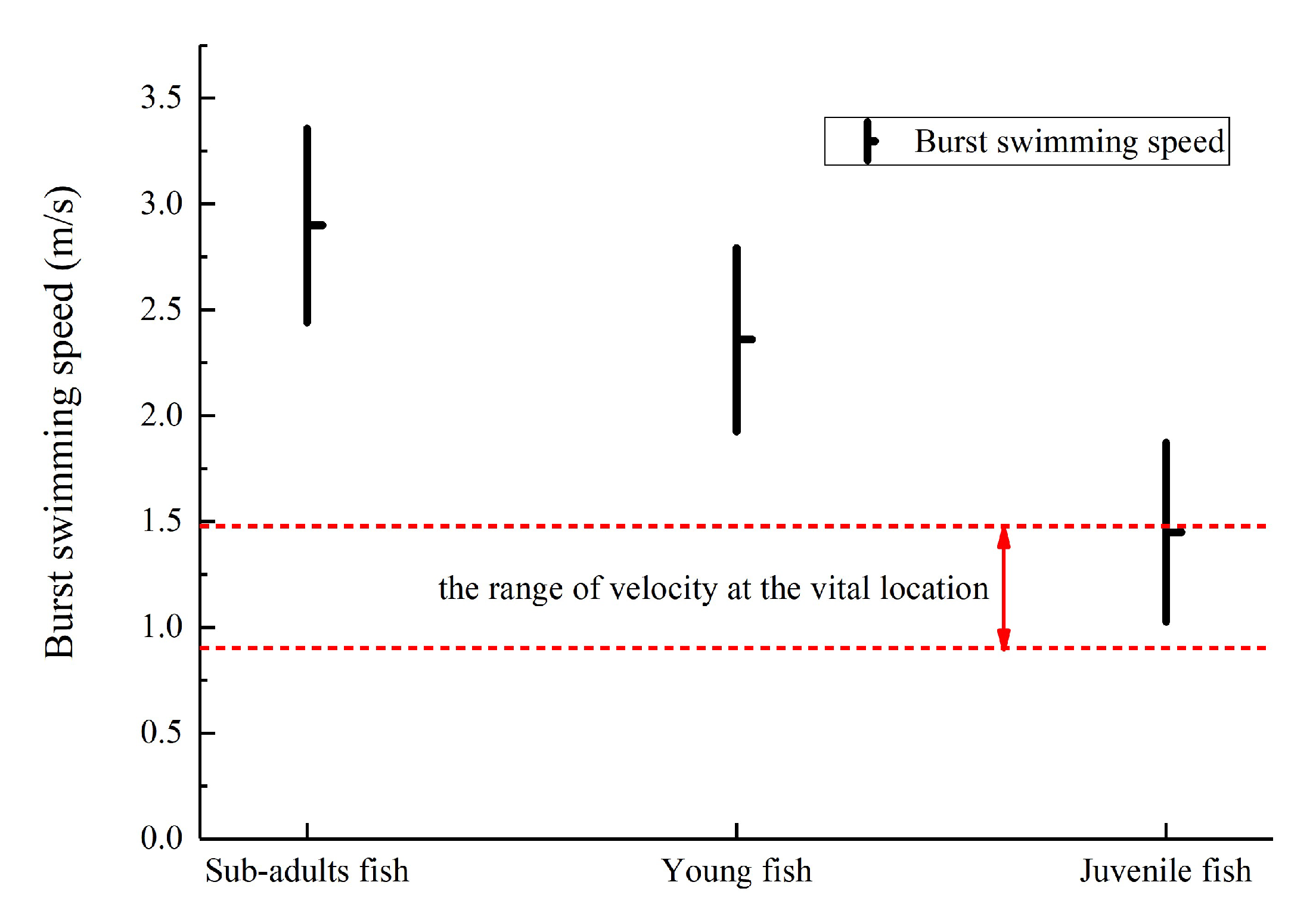
2.4. Target Fish
3. Results and Discussion
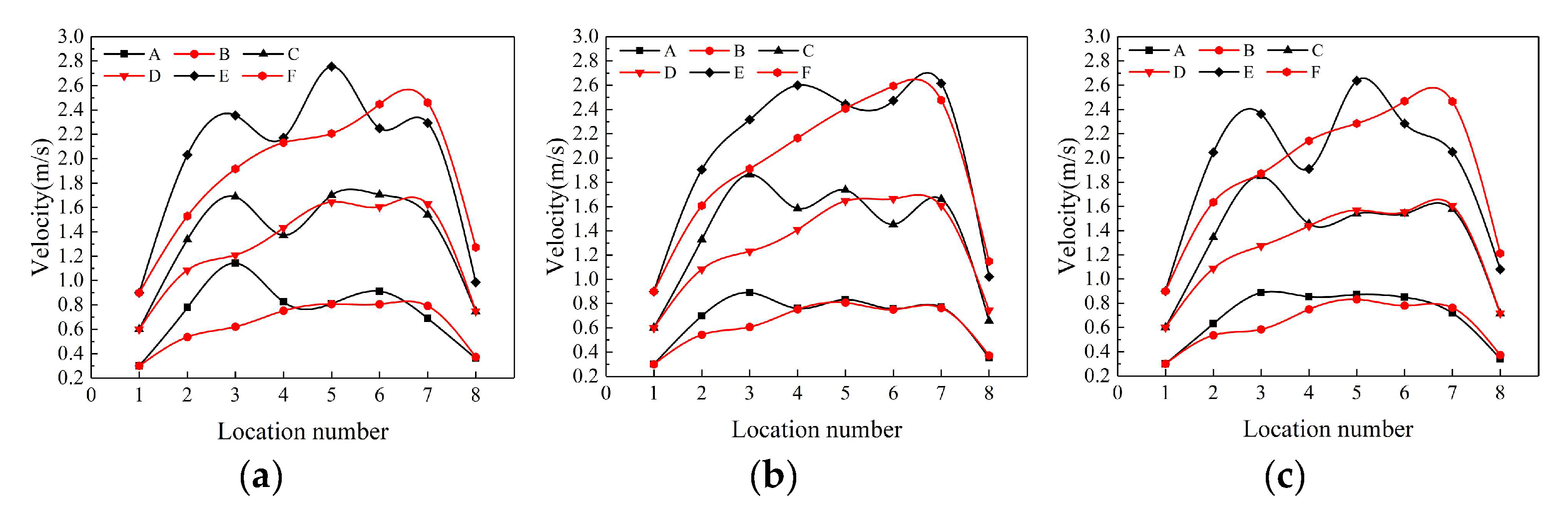
3.1. Model Selection Analysis
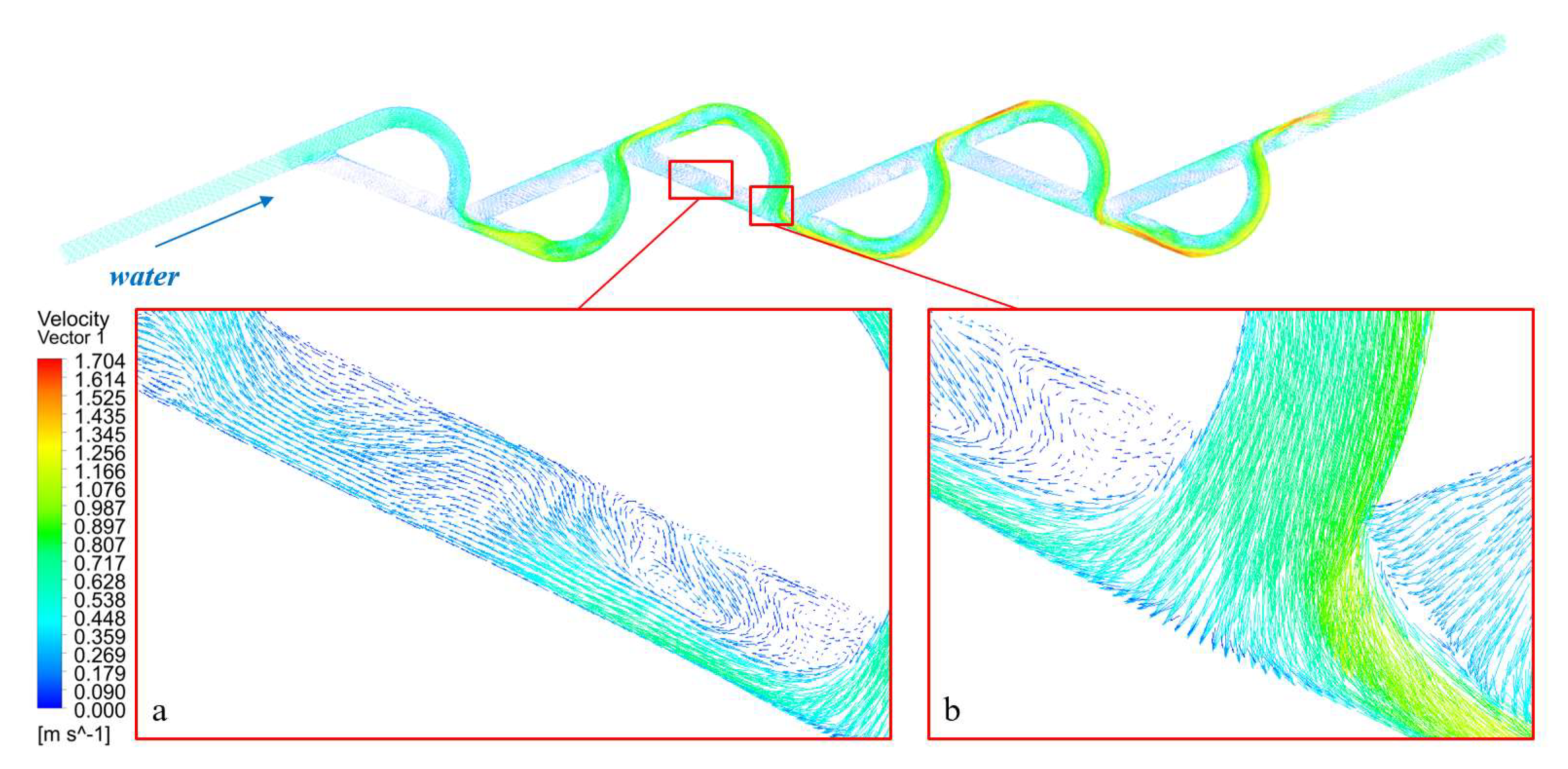
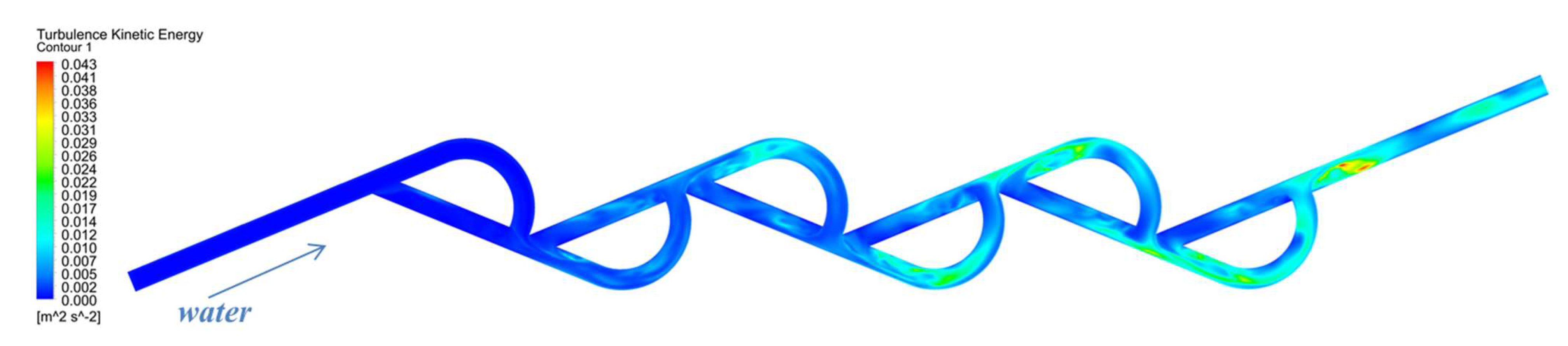
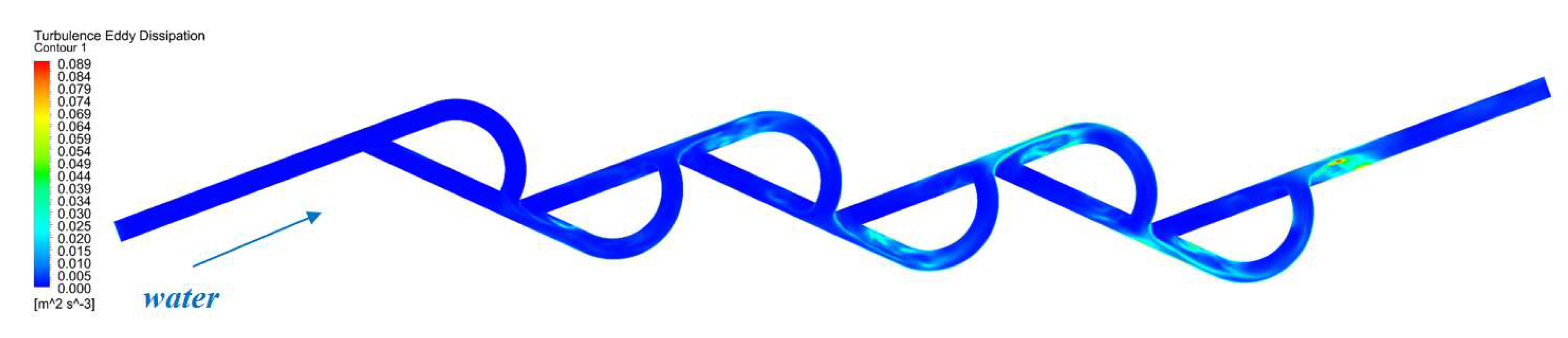
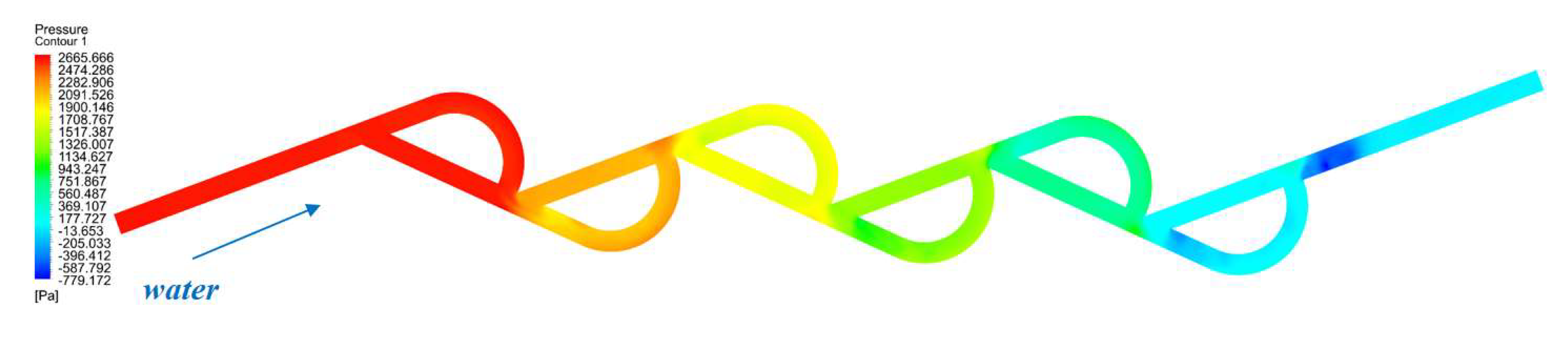
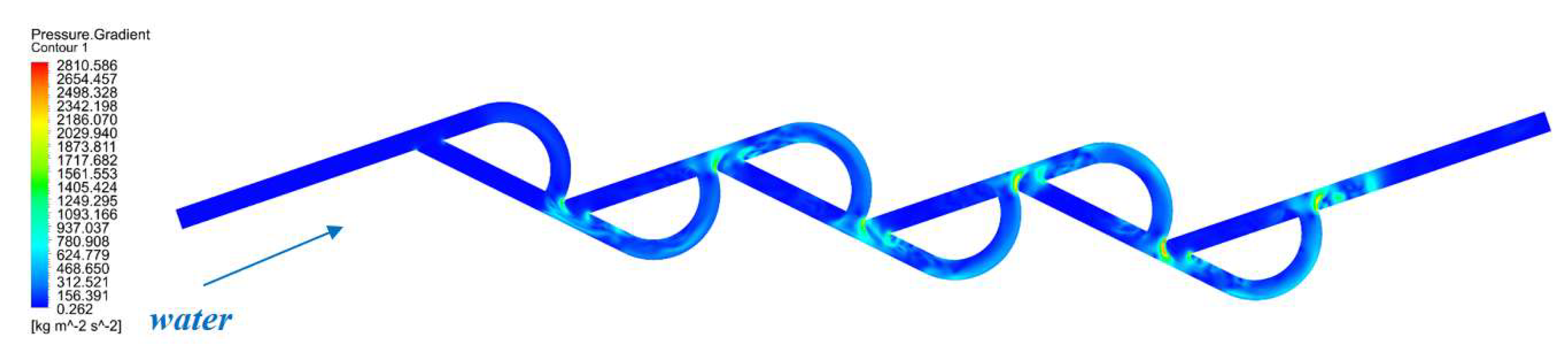
3.2. Analysis of Turbulence Characteristics
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, V.K.; Nath, T. Energy generation by small hydro power plant under different operating condition. Int. J. Hydromechatronics 2021, 4, 331–349. [Google Scholar] [CrossRef]
- Romão, F.; Quaresma, A.L.; Santos, J.M.; Amaral, S.D.; Branco, P.; Pinheiro, A.N. Multislot fishway improves entrance performance and fish transit time over vertical slots. Water 2021, 13, 275. [Google Scholar] [CrossRef]
- Baharvand, S.; Lashkar-Ara, B. Hydraulic design criteria of the modified meander C-type fishway using the combined experimental and CFD models. Ecol. Eng. 2021, 164, 106207. [Google Scholar] [CrossRef]
- Lucas, M.; Baras, E. Migration of Freshwater Fishes; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Sanz-Ronda, F.J.; Fuentes-Pérez, J.F.; García-Vega, A.; Bravo-Córdoba, F.J. Fishways as downstream routes in small hydropower plants: Experiences with a potamodromous cyprinid. Water 2021, 13, 1041. [Google Scholar] [CrossRef]
- Pavlova, A.; Beheregaray, L.B.; Coleman, R.; Gilligan, D.; Harrisson, K.A.; Ingram, B.A.; Kearns, J.; Lamb, A.M.; Lintermans, M.; Lyon, J. Severe consequences of habitat fragmentation on genetic diversity of an endangered Australian freshwater fish: A call for assisted gene flow. Evol. Appl. 2017, 10, 531–550. [Google Scholar] [CrossRef] [PubMed]
- Cao, Q.; Yang, W.; Zhuo, L. Review on Study of Fishery Facilities at Home and Abroad. J. Yangtze River Sci. Res. Inst. 2010, 27, 39–43. [Google Scholar] [CrossRef]
- Birnie-Gauvin, K.; Franklin, P.; Wilkes, M.; Aarestrup, K. Moving beyond fitting fish into equations: Progressing the fish passage debate in the Anthropocene. Aquat. Conserv. Mar. Freshw. Ecosyst. 2019, 29, 1095–1105. [Google Scholar] [CrossRef]
- Sanagiotto, D.G.; Rossi, J.B.; Bravo, J.M. Applications of Computational Fluid Dynamics in The Design and Rehabilitation of Nonstandard Vertical Slot Fishways. Water 2019, 11, 199. [Google Scholar] [CrossRef]
- Mao, X. Review of fishway research in China. Ecol. Eng. 2018, 115, 91–95. [Google Scholar] [CrossRef]
- Katopodis, C.; Williams, J.G. The development of fish passage research in a historical context. Ecol. Eng. 2012, 48, 8–18. [Google Scholar] [CrossRef]
- Jaziri, N.; Boughamoura, A.; Müller, J.; Mezghani, B.; Tounsi, F.; Ismail, M. A comprehensive review of Thermoelectric Generators: Technologies and common applications. Energy Rep. 2020, 6, 264–287. [Google Scholar] [CrossRef]
- Keizer, K. Determination Whether a Large Scale Tesla Valve Could Be Applicable as a Fish Passage. Additional Thesis, Delft University of Technology, Delf, The Netherlands, October 2016. [Google Scholar]
- Kroes, M.; Monden, S. Vismigratie. Een Handboek Voor Herstel in Vlaanderen en; Aminal, Afdeling Water: Brussel, Belgium, 2005. [Google Scholar]
- Jin, Z.; Gao, Z.; Chen, M.; Qian, J. Parametric study on Tesla valve with reverse flow for hydrogen decompression. Int. J. Hydrogen Energy 2018, 43, 8888–8896. [Google Scholar] [CrossRef]
- Porwal, P.R.; Thompson, S.M.; Walters, D.K.; Jamal, T. Heat transfer and fluid flow characteristics in multistaged Tesla valves. Numer. Heat Transf. Part A Appl. 2018, 73, 347–365. [Google Scholar] [CrossRef]
- He, C.; Gu, Y.; Zhang, J.; Ma, L.; Yan, M.; Mou, J.; Ren, Y. Preparation and modification technology analysis of ionic polymer-metal composites (IPMCs). Int. J. Mol. Sci. 2022, 23, 3522. [Google Scholar] [CrossRef] [PubMed]
- Tarrade, L.; Pineau, G.; Calluaud, D.; Texier, A.; David, L.; Larinier, M. Detailed experimental study of hydrodynamic turbulent flows generated in vertical slot fishways. Environ. Fluid Mech. 2011, 11, 1–21. [Google Scholar] [CrossRef]
- Dong, Z.; Yu, J.; Huang, Z. Experimental Study on Turbulence Structure of Combined Fishway with Overflow Weir and Vertical Joint. Advances in Water Science 2021, 32, 279–285. [Google Scholar] [CrossRef]
- Duarte, B.A.D.F.; Ramos, I.C.R.; Santos, H.D.A. Reynolds shear-stress and velocity: Positive biological response of neotropical fishes to hydraulic parameters in a vertical slot fishway. Neotrop. Ichthyol. 2012, 10, 813–819. [Google Scholar] [CrossRef]
- Cea, L.; Pena, L.; Puertas, J.; Vázquez-Cendón, M.; Peña, E. Application of several depth-averaged turbulence models to simulate flow in vertical slot fishways. J. Hydraul. Eng. 2007, 133, 160–172. [Google Scholar] [CrossRef]
- Luo, H.; Zhou, P.; Shu, L.; Mou, J.; Zheng, H.; Jiang, C.; Wang, Y. Energy Performance Curves Prediction of Centrifugal Pumps Based on Constrained PSO-SVR Model. Energies 2022, 15, 3309. [Google Scholar] [CrossRef]
- Heimerl, S.; Hagmeyer, M.; Echteler, C. Numerical flow simulation of pool-type fishways: New ways with well-known tools. Hydrobiologia 2008, 609, 189–196. [Google Scholar] [CrossRef]
- Fuentes-Perez, J.F.; Silva, A.T.; Tuhtan, J.A.; Garcia-Vega, A.; Carbonell-Baeza, R.; Musall, M.; Kruusmaa, M. 3D modelling of non-uniform and turbulent flow in vertical slot fishways. Environ. Model. Softw. 2018, 99, 156–169. [Google Scholar] [CrossRef]
- Marriner, B.A.; Baki, A.B.M.; Zhu, D.Z.; Cooke, S.J.; Katopodis, C. The hydraulics of a vertical slot fishway: A case study on the multi-species Vianney-Legendre fishway in Quebec, Canada. Ecol. Eng. J. Ecotechnol. 2016, 90, 190–202. [Google Scholar] [CrossRef]
- Barton, A.F.; Keller, R.J. 3D Free Surface Model of a Vertical Slot Fishway. In Proceedings of the IAHR Congress, Bergen, Norway, 8–10 May 2003. [Google Scholar]
- Silva, A.T.; Santos, J.M.; Ferreira, M.T.; Pinheiro, A.N.; Katopodis, C. Effects of Water Velocity and Turbulence on the Behaviour of Iberian Barbel (Luciobarbus Bocagei, Steindachner 1864) in an Experimental Pool-Type Fishway. River Res. Appl. 2011, 27, 360–373. [Google Scholar] [CrossRef]
- Martins, K.L.; Silva, R.B.D.; Silvestre, G.M.; Pinto, V.T.; Santos, E.D.d.; Isoldi, L.A.; Rocha, L.A.O. Constructal design applied to geometrical analysis of a triangular arrangement of H-Darrieus wind turbines. Int. J. Hydromechatronics 2020, 3, 155–166. [Google Scholar] [CrossRef]
- Kumar, S.; Verma, K.A.; Pandey, K.M.; Sharma, K.K. A review on methods used to reduce drag of the ship hulls to improve hydrodynamic characteristics. Int. J. Hydromechatronics 2020, 3, 297–312. [Google Scholar] [CrossRef]
- Qian, J.; Chen, M.; Liu, X.; Jin, Z. A numerical investigation of the flow of nanofluids through a micro Tesla valve. J. Zhejiang Univ. Sci. A 2018, 20, 50–60. [Google Scholar] [CrossRef]
- Gamboa, A.R.; Morris, C.J.; Forster, F.K. Improvements in Fixed-Valve Micropump Performance Through Shape Optimization of Valves. J. Fluids Eng. 2005, 127, 339–346. [Google Scholar] [CrossRef]
- Yuan, X.; He, Z.; Mao, G. Numerical Simulation of a Turbulence Flow in the Cut-off Valve by RNG k- ε Turbulence Model. Fluid Mach. 2006, 34, 5. [Google Scholar] [CrossRef]
- Wei, Y.; Luo, K.; Tan, J.; Tang, L.; Wang, J. Study on Hydraulic Characteristics of Vertical Slot Fishway Based on Three Turbulence Models. Water Resour. Power 2020, 38, 71–74+78. [Google Scholar]
- Bao, Y.; Wang, H. Numerical study on flow and heat transfer characteristics of a novel Tesla valve with improved evaluation method. Int. J. Heat Mass Transf. 2022, 187, 122540. [Google Scholar] [CrossRef]
- Xu, M.; Zeng, G.; Wu, D.; Mou, J.; Zhao, J.; Zheng, S.; Huang, B.; Ren, Y. Structural Optimization of Jet Fish Pump Design Based on a Multi-Objective Genetic Algorithm. Energies 2022, 15, 4104. [Google Scholar] [CrossRef]
- Gu, Y.; Zhang, J.; Yu, S.; Mou, C.; Li, Z.; He, C.; Wu, D.; Mou, J.; Ren, Y. Unsteady numerical simulation method of hydrofoil surface cavitation. Int. J. Mech. Sci. 2022, 228, 107490. [Google Scholar] [CrossRef]
- Sullivan, C.J.; Weber, M.J.; Pierce, C.L.; Camacho, C.A. A Comparison of Grass Carp Population Characteristics Upstream and Downstream of Lock and Dam 19 of the Upper Mississippi River. J. Fish Wildl. Manag. 2020, 11, 99–111. [Google Scholar] [CrossRef]
- Masser, M.P. Using Grass Carp in Aquaculture and Private Impoundments; SRAC: Mississippi, MS, USA, 2002. [Google Scholar]
- Mu, X.; Zhen, W.; Li, X.; Cao, P.; Gong, L.; Xu, F. A Study of the Impact of Different Flow Velocities and Light Colors at the Entrance of a Fish Collection System on the Upstream Swimming Behavior of Juvenile Grass Carp. Water 2019, 11, 322. [Google Scholar] [CrossRef]
- Xu, M.; Ji, B.; Zou, J.; Long, X. Experimental investigation on the transport of different fish species in a jet fish pump. Aquac. Eng. 2017, 79, 42–48. [Google Scholar] [CrossRef]
- Wen, Y.; Chen, R.-F. Study on seepage characteristics of large scale Tesla valve and feasibility of its application in water pipeline. J. Hydrodyn. 2020, 35, 10. [Google Scholar] [CrossRef]
- Novak, G.; Domínguez, J.M.; Tafuni, A.; Silva, A.T.; Pengal, P.; Četina, M.; Žagar, D. 3-D Numerical Study of a Bottom Ramp Fish Passage Using Smoothed Particle Hydrodynamics. Water 2021, 13, 1595. [Google Scholar] [CrossRef]
- Qian, J.; Chen, M.; Gao, Z.; Jin, Z. Mach number and energy loss analysis inside multi-stage Tesla valves for hydrogen decompression. Energy 2019, 179, 647–654. [Google Scholar] [CrossRef]
- Mohammadzadeh, K.; Kolahdouz, E.; Shirani, E.; Shafii, M. Numerical Investigation on the effect of the size and number of stages on the Tesla microvalve efficiency. J. Mech. 2013, 29, 527–534. [Google Scholar] [CrossRef]
- Lu, B.; Liu, W.; Liang, Y.; Chen, Q.; Huang, Y.; Pan, L.; Liu, D.; Shi, X. The burst-coast swimming behavior of grass carp (Ctenopharyngodon idellus) during fast-start. J. Fish. China 2014, 38, 6. [Google Scholar] [CrossRef]
- Yang, Q.; Hu, P.; Yang, Z.; Chu, L.; Yang, J. Suitable Flow Rate and Adaptive Threshold for Grass Carp (Ctenopharyngodon idellus) Migration. J. Hydroecology 2019, 40, 8. [Google Scholar] [CrossRef]
- General Institute of Water Resources and Hydropower Planning and Design. Guidelines for Fishway Design of Water Conservancy and Hydropower Projects; SL 609-2013; China Water & Power Press: Beijing, China, 2013. [Google Scholar]
- Yan, B.; Kells, J.A.; Sparling, B.F.; Garner, M.E.; Katopodis, C. Turbulence Characteristics of the Flow in a Corrugated Steel Pipe Cul-vert in the Context of Fish Passage. In Proceedings of the 20th Canadian Hydrotechnical Conference, Ottawa, ON, Canada, 14–17 June 2011. [Google Scholar]
- Gao, F. Study on seepage characteristics of water conservancy facilities in fishway in river regulation project. Hydro Sci. Cold Zone Eng. 2021, 6, 26–31. [Google Scholar] [CrossRef]
- Dong, Z.; Jiang, L.; Mao, B.; Chen, X. An Experimental Study of Turbulent Flow Structures in a Vertical Slot Fishway with Staggered Slots. J. Hydroecology 2021, 42, 129–136. [Google Scholar] [CrossRef]
- Bravo-Córdoba, F.; Fuentes-Pérez, J.; Valbuena-Castro, J.; Azagra-Paredes, A.; Sanz-Ronda, F. Turning Pools in Stepped Fishways: Biological Assessment via Fish Response and CFD Models. Water 2021, 13, 1186. [Google Scholar] [CrossRef]
- Baki, A.B.M.; Zhu, D.Z.; Rajaratnam, N. Turbulence Characteristics in a Rock-Ramp-Type Fish Pass. J. Hydraul. Eng. 2015, 141, 156–168. [Google Scholar] [CrossRef]
- Waterhouse, A.F.; MacKinnon, J.A.; Nash, J.D.; Alford, M.H.; Kunze, E.; Simmons, H.L.; Polzin, K.L.; Laurent, L.C.S.; Sun, O.M.; Pinkel, R.; et al. Global Patterns of Diapycnal Mixing from Measurements of the Turbulent Dissipation Rate. J. Phys. Oceanogr. 2014, 44, 1854–1872. [Google Scholar] [CrossRef]
- Jiang, Y.; Yang, Z.; Shi, X.; Wu, L.; Nie, L.; Wei, Y. The simulation of fish migratory trajectory in a vertical slot fishway based on multi-hydraulic indices. Chin. J. Ecol. 2018, 37, 1282–1290. [Google Scholar] [CrossRef]
- Andriukaitis, D.; Vargalis, R.; Šerpytis, L.; Drevinskas, T.; Kornyšova, O.; Stankevičius, M.; Bimbiraitė-Survilienė, K.; Kaškonienė, V.; Maruškas, A.S.; Jonušauskas, L. Fabrication of Microfluidic Tesla Valve Employing Femtosecond Bursts. Micromachines 2022, 13, 1180. [Google Scholar] [CrossRef]
- Stephenson, J.R.; Gingerich, A.J.; Brown, R.S.; Pflugrath, B.D.; Deng, Z.; Carlson, T.J.; Langeslay, M.J.; Ahmann, M.L.; Johnson, R.L.; Seaburg, A.G. Assessing barotrauma in neutrally and negatively buoyant juvenile salmonids exposed to simulated hydro-turbine passage using a mobile aquatic barotrauma laboratory. Fish. Res. 2010, 106, 271–278. [Google Scholar] [CrossRef]
- Shao, Q.; Li, H.; Wu, Y.; Chen, J. Simulating Experiment on Fish Damage Caused by The Pressure Gradient in Hydraulic Machinery. J. Mech. Eng. 2002, 38, 7–11. [Google Scholar] [CrossRef]
- Huang, L.; Wang, J.; Hou, L.; Yang, Y. Experimental study on cavitation evolution law and cavitation damage of stop valve. Fluid Mach. 2022, 50, 1–7. [Google Scholar] [CrossRef]
- Wang, Y.; Zhai, Z.; Yang, L.; Shi, X. Effect of Sudden Pressure Change in Turbine Passages on Juveniles of the Four Major Chinese Carps. J. Hydroecol. 2021, 42, 86–93. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Results | Numerical Results | Relative Error (%) | |
|---|---|---|---|
| RPDR | 11.61 | 10.96 | 5.60% |
| APDR | 35.83 | 33.54 | 6.39% |
| Working Condition | 0% | 5% | 10% |
|---|---|---|---|
| 0.3 m/s | 13.74 | 10.87 | 11.33 |
| 0.6 m/s | 7.67 | 9.56 | 7.76 |
| 0.9 m/s | 8.15 | 8.61 | 2.28 |
| Grass Carp | Body Length (m) | Burst Swimming Speed (m/s) |
|---|---|---|
| Sub-adults fish | 0.5124 ± 0.0324 | 2.899 ± 0.457 |
| Young fish | 0.1793 ± 0.0127 | 2.359 ± 0.434 |
| Juvenile fish | 0.0847 ± 0.0073 | 1.449 ± 0.424 |
| NO. | Species (Scientific Name) | Body Length (m) | Burst Swimming Speed (m/s) |
|---|---|---|---|
| 1 | Mylopharyngodon piceus | 0.265 ± 0.145 | 1.22 ± 0.19 |
| 2 | Hypophthalmichthys molitrix | 0.905 ± 0.385 | 0.96 ± 0.34 |
| 3 | Aristichthys nobilis | 0.185 ± 0.035 | 1.10 ± 0.12 |
| 4 | Schizothorax oconnori | 0.267 ± 0.036 | 1.53 ± 0.24 |
| 5 | Schizothorax macropogon | 0.253 ± 0.034 | 1.22 ± 0.15 |
| 6 | Racoma waltoni | 0.305 ± 0.047 | 1.37 ± 0.17 |
| 7 | Oxygymnocypris stewarti | 0.216 ± 0.016 | 1.38 ± 0.20 |
| 8 | Ptychobarbus dipogon | 0.253 ± 0.050 | 1.10 ± 0.18 |
| 9 | Schizopygopsis malacanthus | 0.109 ± 0.023 | 0.92 ± 0.08 |
| 10 | Gymnodiptychus dybowskii | 0.182 ± 0.023 | 1.06 ± 0.18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, G.; Xu, M.; Mou, J.; Hua, C.; Fan, C. Application of Tesla Valve’s Obstruction Characteristics to Reverse Fluid in Fish Migration. Water 2023, 15, 40. https://doi.org/10.3390/w15010040
Zeng G, Xu M, Mou J, Hua C, Fan C. Application of Tesla Valve’s Obstruction Characteristics to Reverse Fluid in Fish Migration. Water. 2023; 15(1):40. https://doi.org/10.3390/w15010040
Chicago/Turabian StyleZeng, Guorui, Maosen Xu, Jiegang Mou, Chenchen Hua, and Chuanhao Fan. 2023. "Application of Tesla Valve’s Obstruction Characteristics to Reverse Fluid in Fish Migration" Water 15, no. 1: 40. https://doi.org/10.3390/w15010040
APA StyleZeng, G., Xu, M., Mou, J., Hua, C., & Fan, C. (2023). Application of Tesla Valve’s Obstruction Characteristics to Reverse Fluid in Fish Migration. Water, 15(1), 40. https://doi.org/10.3390/w15010040