

A Low-Cost Wireless Sensor for Real-Time Monitoring of Water Level in Lowland Rice Field under Alternate Wetting and Drying Irrigation
 ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Sensor Development
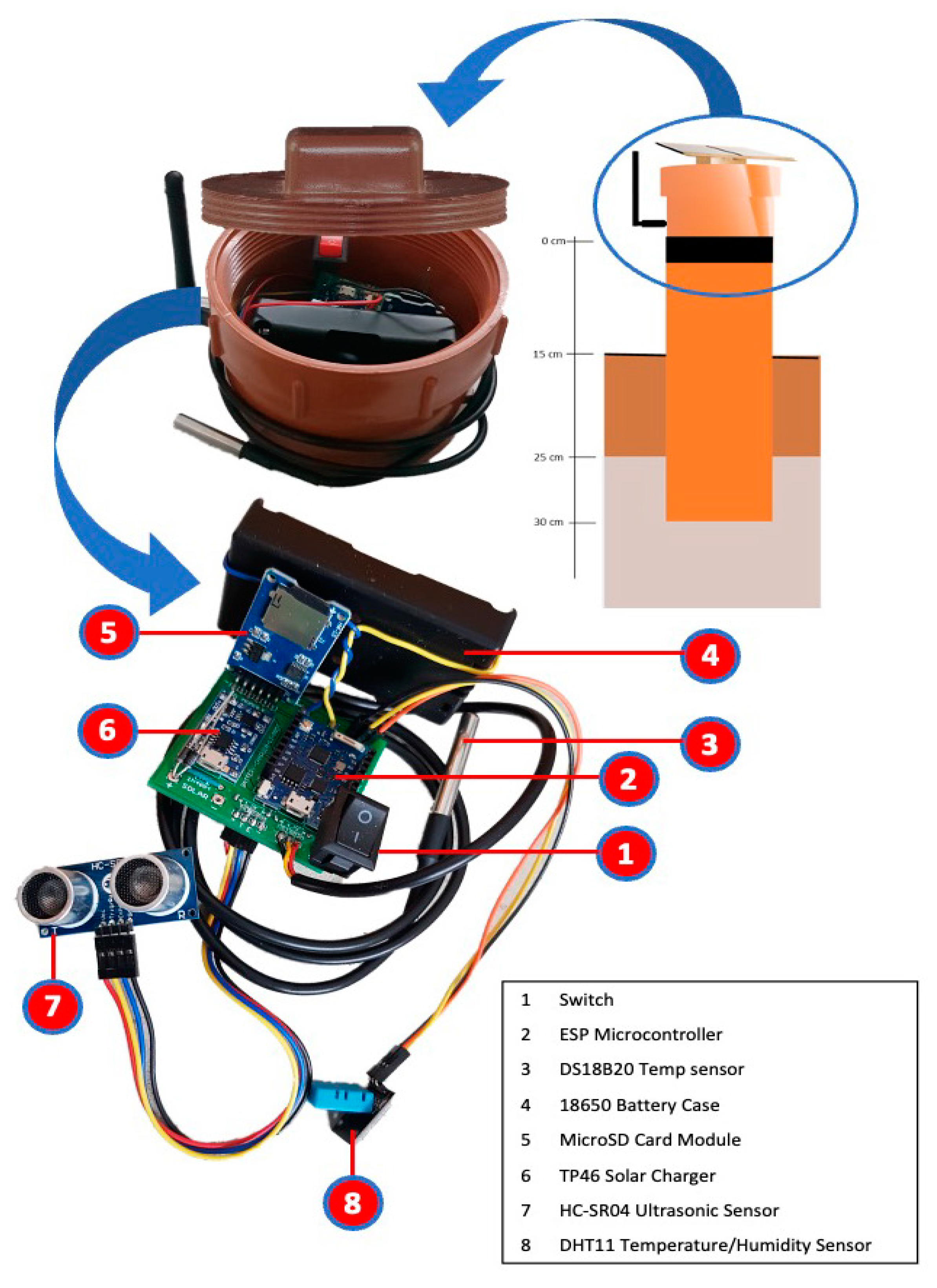
2.1.1. Hardware
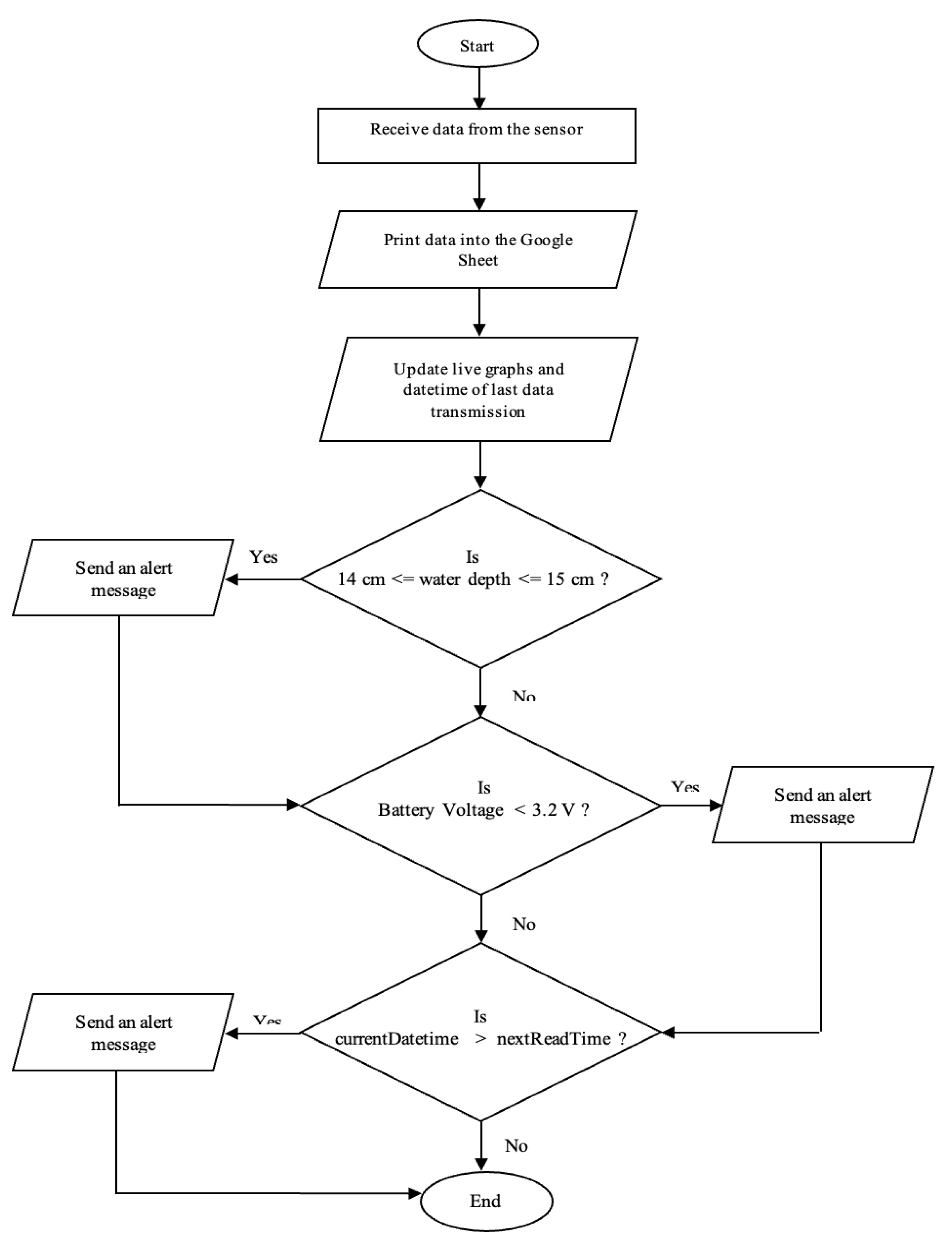
2.1.2. Sensor Programming
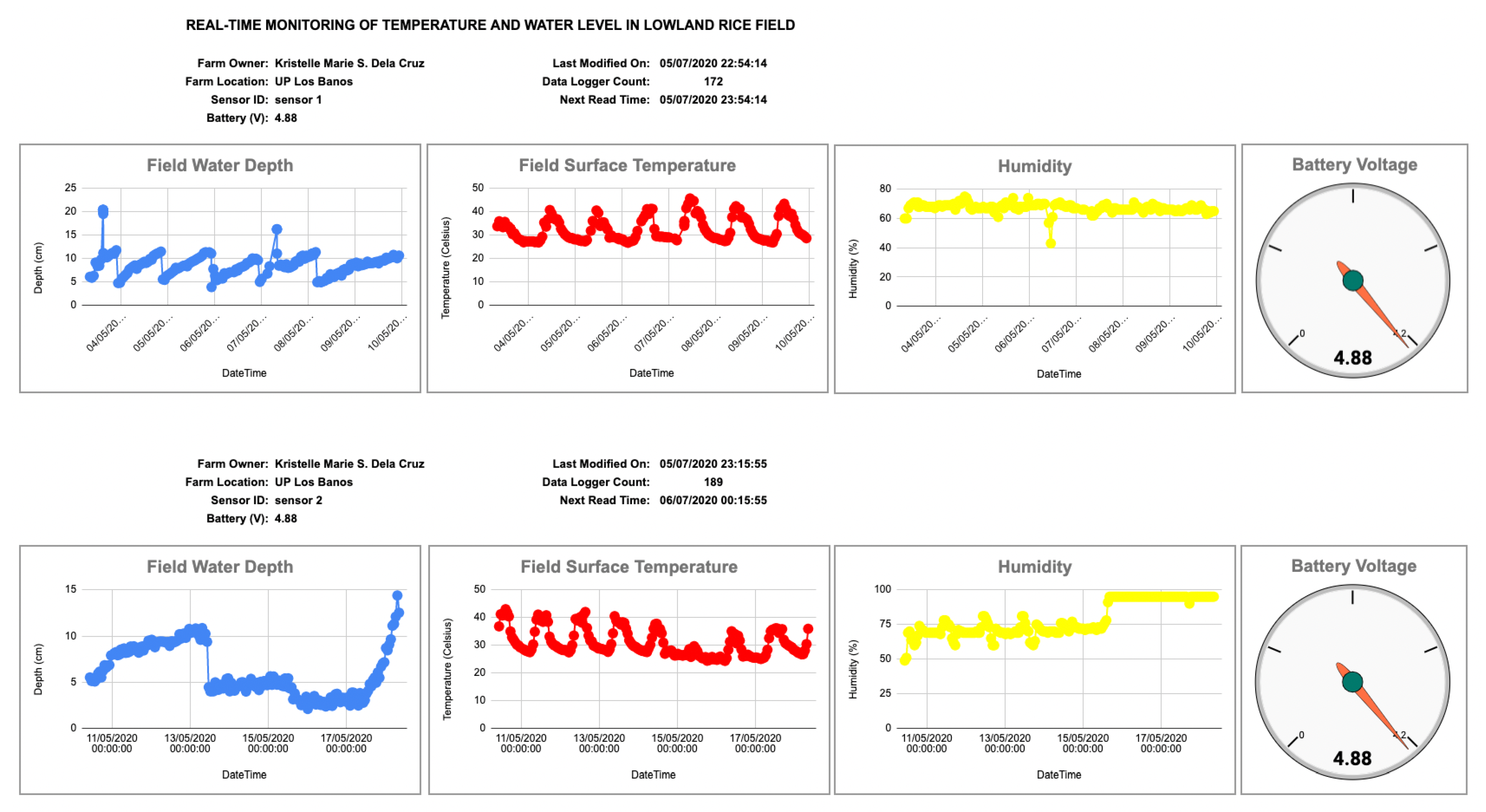
2.1.3. Online Database and Alert Messaging Systems
2.2. Sensor Testing
2.2.1. Laboratory Test
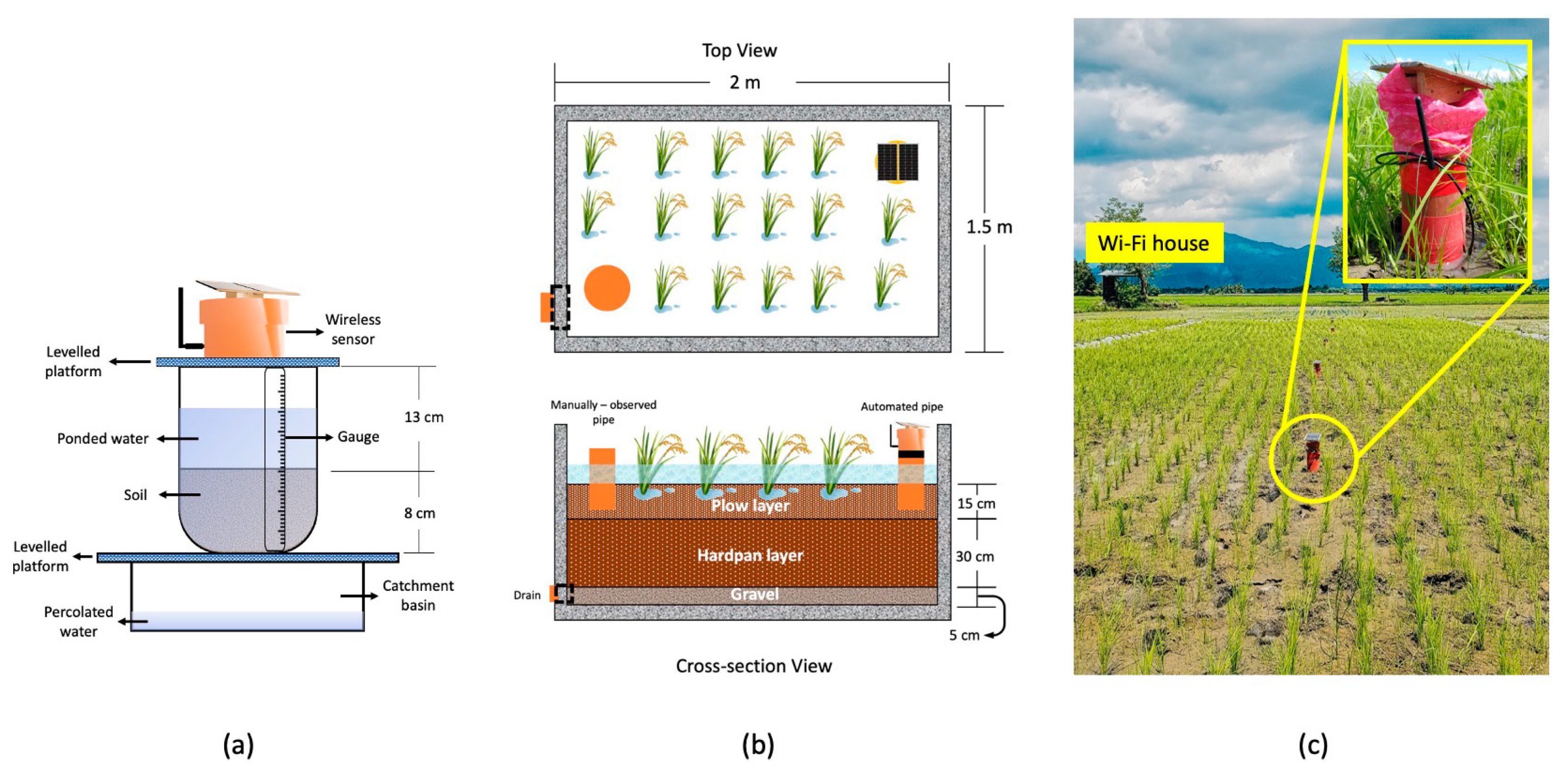
2.2.2. Pseudo-Field Test
2.3. Actual Field Deployment
2.4. Performance Comparison between the Low-Cost Sensor and the High-End Sensor
2.5. Statistical Analysis
3. Results and Discussion
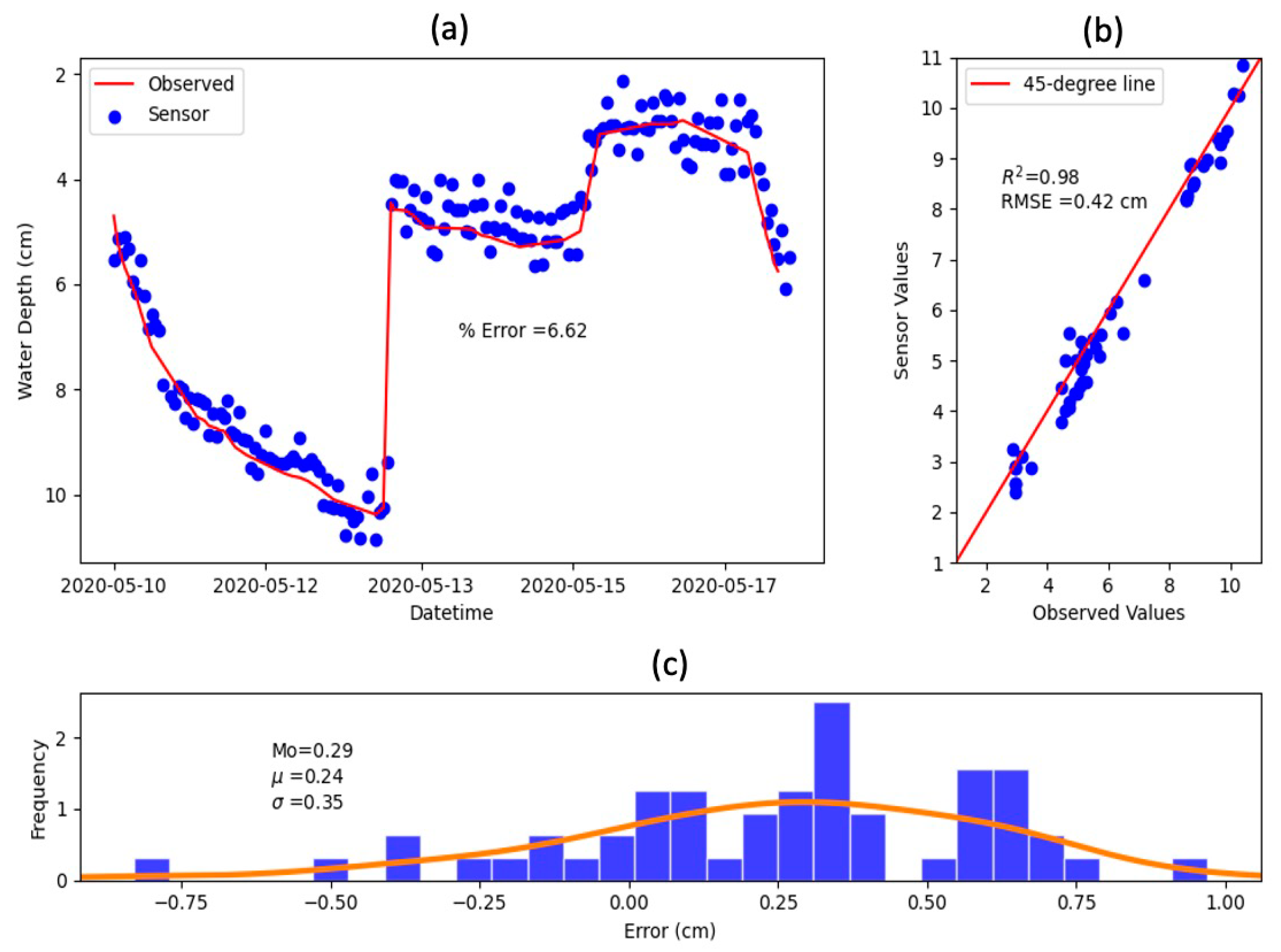
3.1. Laboratory Test Condition
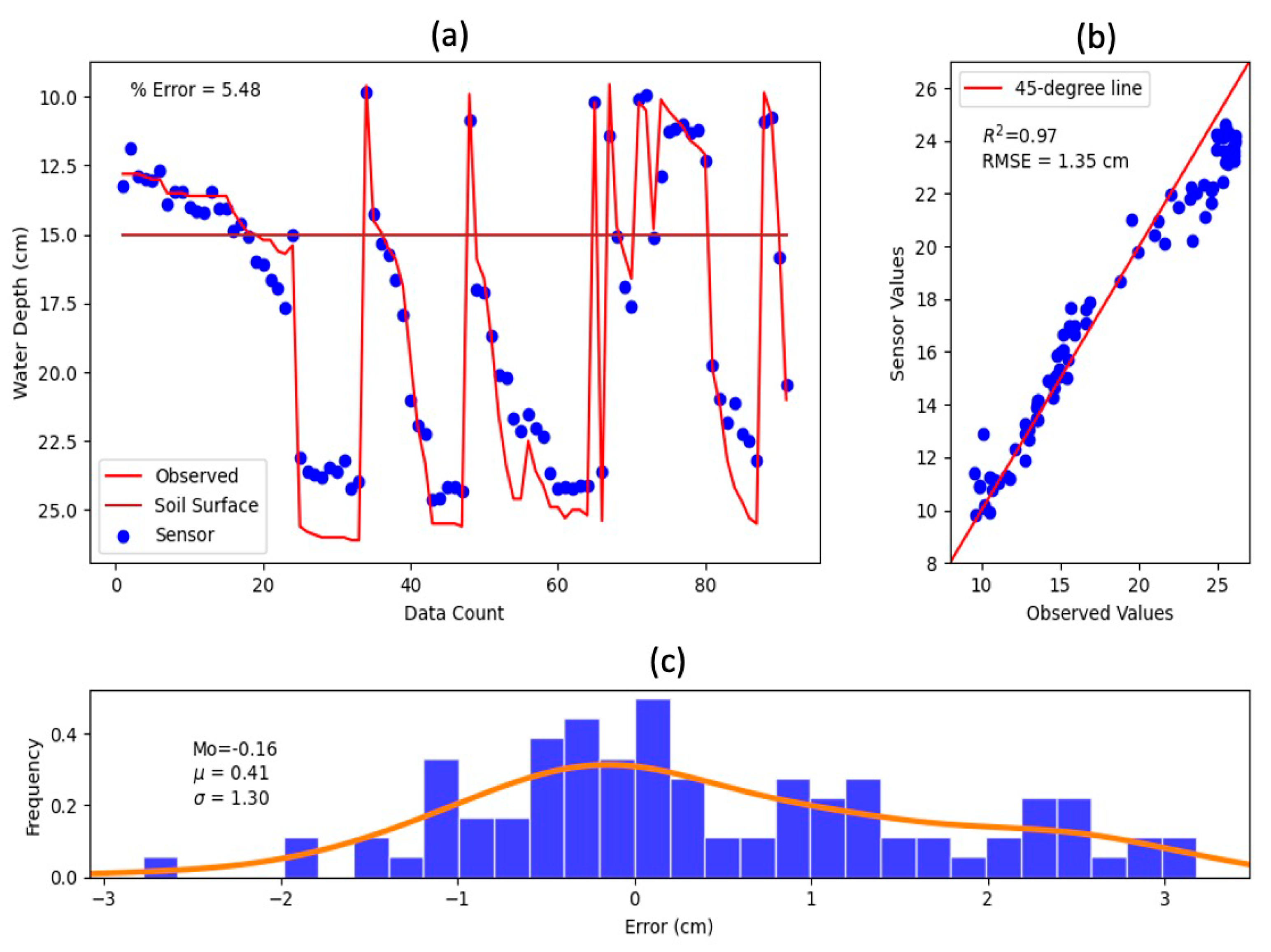
3.2. Pseudo-Field Test Condition
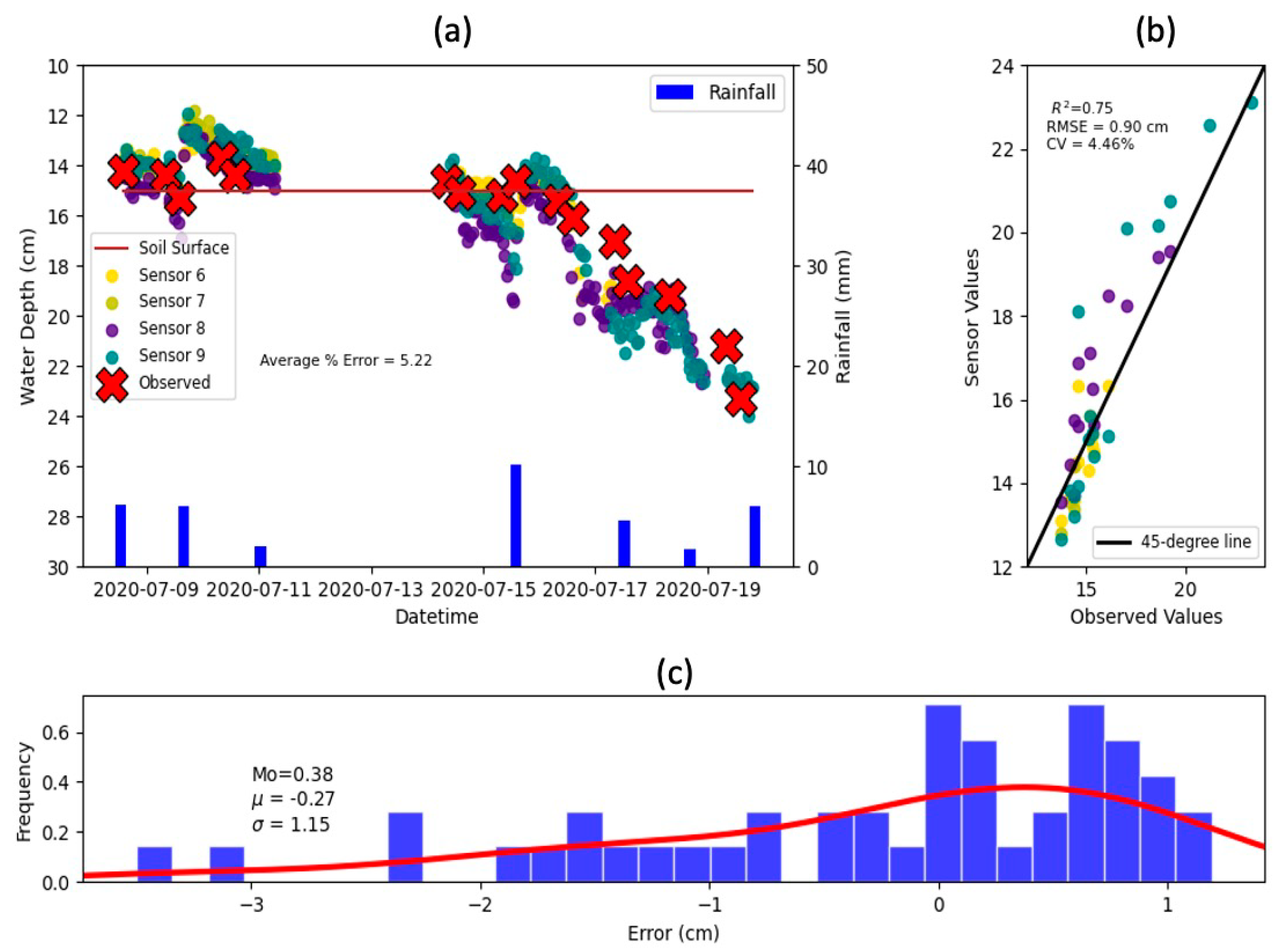
3.3. Actual Field Deployment
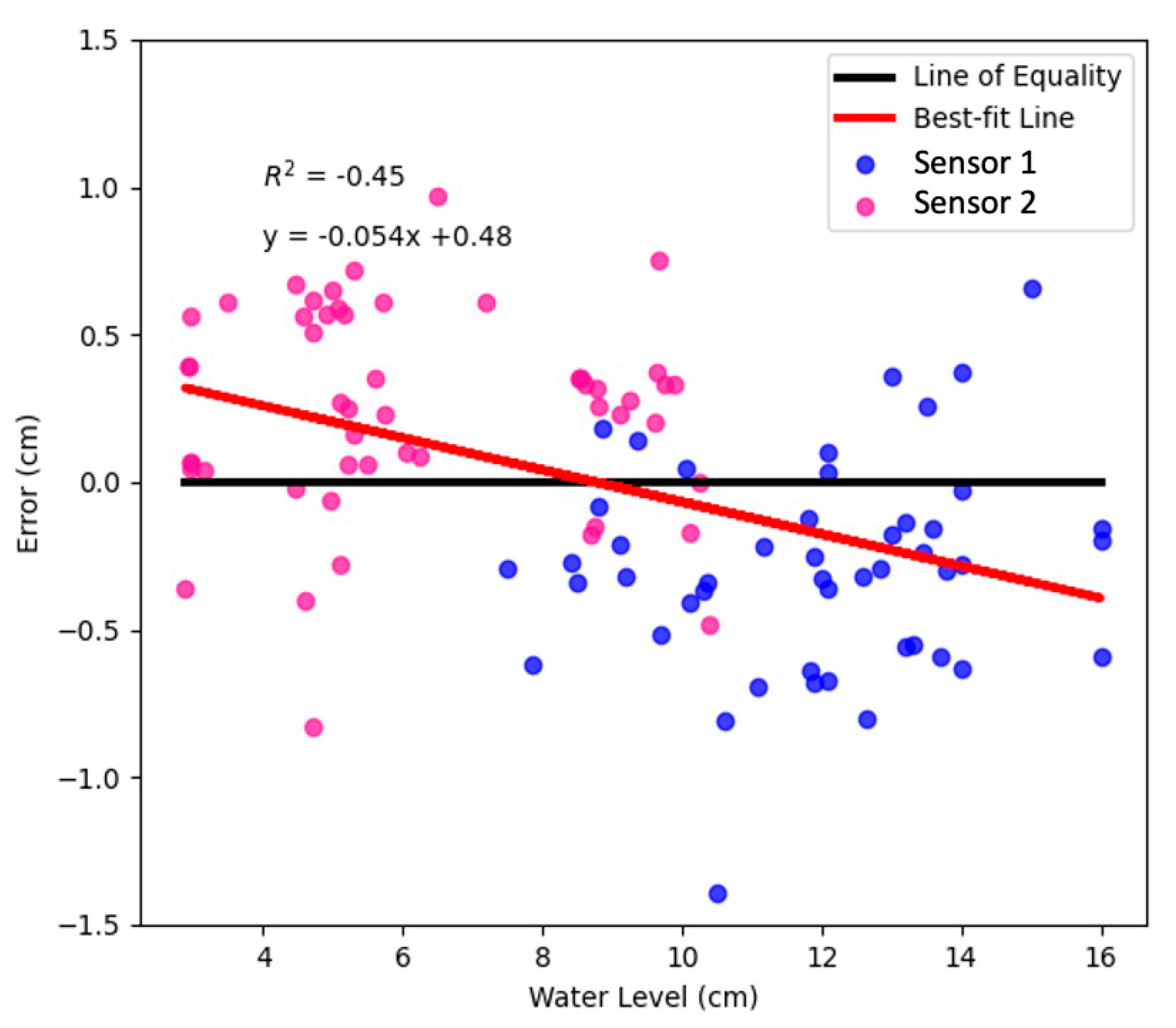
3.4. Performance Comparison between the Low-Cost Sensor and High-End Sensor
3.5. Strengths and Limitations of the Developed Low-Cost Wireless Sensor
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Date | Time | Water Depth (cm) | Temperature (°C) | Humidity (%) | Battey Voltage (Volts) |
|---|---|---|---|---|---|---|
| 1 | 10-May-2020 | 10:26:31 AM | 5.53 | 36.81 | 49 | 3.76 |
| 2 | 10-May-2020 | 11:27:02 AM | 5.14 | 41.19 | 51 | 3.87 |
| 3 | 10-May-2020 | 12:27:13 PM | 5.42 | 40.75 | 69 | 3.92 |
| 4 | 10-May-2020 | 1:27:25 PM | 5.09 | 40.94 | 70 | 3.94 |
| 5 | 10-May-2020 | 2:27:24 PM | 5.32 | 43.00 | 64 | 3.92 |
| 6 | 10-May-2020 | 3:27:48 PM | 5.95 | 41.81 | 63 | 3.95 |
| 7 | 10-May-2020 | 4:27:35 PM | 6.16 | 40.38 | 60 | 3.96 |
| 8 | 10-May-2020 | 5:26:46 PM | 5.53 | 35.00 | 62 | 3.94 |
| 9 | 10-May-2020 | 6:25:32 PM | 6.23 | 32.88 | 67 | 3.93 |
| 10 | 10-May-2020 | 7:25:01 PM | 6.85 | 32.00 | 74 | 3.93 |
| 11 | 10-May-2020 | 8:24:43 PM | 6.58 | 31.06 | 72 | 3.93 |
| 12 | 10-May-2020 | 9:24:30 PM | 6.76 | 30.19 | 71 | 3.93 |
| 13 | 10-May-2020 | 10:24:26 PM | 6.87 | 29.94 | 70 | 3.93 |
| 14 | 10-May-2020 | 11:24:11 PM | 7.91 | 29.25 | 69 | 3.93 |
| 15 | 11-May-2020 | 1:23:27 AM | 8.14 | 28.62 | 69 | 3.93 |
| 16 | 11-May-2020 | 2:23:12 AM | 8.26 | 28.19 | 69 | 3.93 |
| 17 | 11-May-2020 | 3:23:06 AM | 7.93 | 27.94 | 69 | 3.92 |
| 18 | 11-May-2020 | 4:23:00 AM | 7.98 | 27.75 | 69 | 3.92 |
| 19 | 11-May-2020 | 5:23:01 AM | 8.54 | 27.50 | 69 | 3.92 |
| 20 | 11-May-2020 | 6:23:05 AM | 8.16 | 28.44 | 69 | 3.92 |
| 21 | 11-May-2020 | 7:23:38 AM | 8.66 | 30.31 | 69 | 3.92 |
| 22 | 11-May-2020 | 8:24:28 AM | 8.18 | 34.88 | 68 | 3.94 |
| 22 | 11-May-2020 | 8:24:28 AM | 8.18 | 34.88 | 68 | 3.94 |
| 23 | 11-May-2020 | 9:25:46 AM | 8.21 | 39.25 | 73 | 4.01 |
| 24 | 11-May-2020 | 10:26:27 AM | 8.27 | 41.06 | 78 | 4.05 |
| 25 | 11-May-2020 | 11:26:36 AM | 8.87 | 39.00 | 78 | 4.09 |
| 26 | 11-May-2020 | 12:26:41 PM | 8.47 | 39.38 | 75 | 4.11 |
| 27 | 11-May-2020 | 1:27:02 PM | 8.89 | 38.44 | 75 | 4.1 |
| 28 | 11-May-2020 | 2:27:20 PM | 8.46 | 40.19 | 73 | 4.13 |
| 29 | 11-May-2020 | 3:27:53 PM | 8.53 | 40.81 | 65 | 4.14 |
| 30 | 11-May-2020 | 4:27:38 PM | 8.2 | 38.44 | 62 | 4.14 |
| 31 | 11-May-2020 | 5:27:05 PM | 8.8 | 33.13 | 60 | 4.13 |
| 32 | 11-May-2020 | 6:26:00 PM | 8.87 | 31.37 | 68 | 4.13 |
| 33 | 11-May-2020 | 7:25:24 PM | 8.44 | 30.50 | 71 | 4.13 |
| 34 | 11-May-2020 | 8:25:19 PM | 8.95 | 29.94 | 70 | 4.13 |
| 35 | 11-May-2020 | 9:25:01 PM | 8.97 | 29.81 | 70 | 4.13 |
| 36 | 11-May-2020 | 10:24:57 PM | 9.50 | 29.19 | 69 | 4.12 |
| 37 | 11-May-2020 | 11:24:55 PM | 9.11 | 28.94 | 69 | 4.13 |
| 38 | 12-May-2020 | 12:24:44 AM | 9.6 | 28.56 | 69 | 4.12 |
| 39 | 12-May-2020 | 1:24:40 AM | 9.24 | 28.31 | 69 | 4.12 |
| 40 | 12-May-2020 | 2:24:35 AM | 8.79 | 28.25 | 69 | 4.12 |
| 41 | 12-May-2020 | 3:24:36 AM | 9.31 | 28.25 | 69 | 4.11 |
| 42 | 12-May-2020 | 4:24:31 AM | 9.36 | 28.00 | 69 | 4.11 |
| 43 | 12-May-2020 | 5:24:25 AM | 9.41 | 27.44 | 69 | 4.11 |
| 44 | 12-May-2020 | 6:24:29 AM | 9.40 | 28.19 | 70 | 4.11 |
| 45 | 12-May-2020 | 7:24:54 AM | 9.40 | 30.06 | 69 | 4.11 |
| 46 | 12-May-2020 | 8:26:07 AM | 9.36 | 33.50 | 69 | 4.15 |
| 47 | 12-May-2020 | 9:27:39 AM | 9.28 | 39.50 | 73 | 4.18 |
| 48 | 12-May-2020 | 10:28:13 AM | 9.36 | 38.94 | 81 | 4.19 |
| 49 | 12-May-2020 | 11:28:07 AM | 8.93 | 39.75 | 81 | 4.22 |
| 50 | 12-May-2020 | 12:28:00 PM | 9.43 | 40.19 | 79 | 4.24 |
| 51 | 12-May-2020 | 1:28:17 PM | 9.41 | 38.13 | 76 | 4.24 |
| 52 | 12-May-2020 | 2:28:28 PM | 9.34 | 41.13 | 73 | 4.24 |
| 53 | 12-May-2020 | 3:28:53 PM | 9.43 | 42.00 | 65 | 4.23 |
| 54 | 12-May-2020 | 4:28:48 PM | 9.55 | 36.25 | 60 | 4.22 |
| 55 | 12-May-2020 | 5:27:05 PM | 10.20 | 33.50 | 60 | 4.22 |
| 56 | 12-May-2020 | 6:26:20 PM | 9.72 | 31.75 | 72 | 4.21 |
| 57 | 12-May-2020 | 7:26:08 PM | 10.23 | 31.44 | 70 | 4.21 |
| 58 | 12-May-2020 | 8:25:48 PM | 10.27 | 29.94 | 70 | 4.20 |
| 59 | 12-May-2020 | 9:25:42 PM | 9.81 | 29.63 | 69 | 4.20 |
| 60 | 12-May-2020 | 10:25:48 PM | 10.28 | 29.37 | 69 | 4.20 |
| … | … | … | … | … | … | … |
References
- Kumar, A.; Katagami, M. Developing and Disseminating Water-Saving Technologies in Asia; Asian Development Bank: Manila, Philippines, 2016; Policy Brief 60; Available online: https://www.adb.org/sites/default/files/publication/185485/water-saving-rice-tech.pdf (accessed on 1 April 2022).
- FAO. Emissions due to agriculture. In Global, Regional and Country Trends 2000–2018; FAOSTAT Analytical Briefs 18; Food and Agriculture Organization: Rome, Italy, 2020. [Google Scholar]
- GRiSP (Global Rice Partnership). Rice Almanac, 4th ed.; International Rice Research Institute: Los Baños, Philippines, 2013. [Google Scholar]
- Bouman, B.A.M.; Lampayan, R.M.; Tuong, T.P. Water Management in Irrigated Rice: Coping with Water Scarcity; International Rice Research Institute: Los Baños, Philippines, 2007. [Google Scholar]
- Lampayan, R.M.; Samoy-Pascual, K.C.; Sibayan, E.B.; Ella, V.B.; Jayag, O.P.; Cabangon, R.J.; Bouman, B.A.M. Effects of alternate wetting and drying (AWD) threshold level and plant seedling age on crop performance, water input, and water productivity of transplanted rice in Central Luzon, Philippines. Paddy Water Environ. 2014, 13, 215–227. [Google Scholar] [CrossRef]
- Carrijo, D.R.; Lundy, M.E.; Linquist, B.A. Rice yields and water use under alternate wetting and drying irrigation: A meta-analysis. Field Crop. Res. 2017, 203, 173–180. [Google Scholar] [CrossRef]
- Howell, K.R.; Shrestha, P.; Dodd, I.C. Alternate wetting and drying irrigation maintained rice yields despite half the irrigation volume, but is currently unlikely to be adopted by smallholder lowland rice farmers in Nepal. Food Energy Secur. 2015, 4, 144–157. [Google Scholar] [CrossRef] [PubMed]
- Linquist, B.A.; Anders, M.M.; Adviento-Borbe, M.A.A.; Chaney, R.L.; Nalley, L.L.; da Rosa, E.F.F.; Van Kessel, C. Reducing greenhouse gas emissions, water use, and grain arsenic levels in rice systems. Glob. Chang. Biol. 2015, 21, 407–417. [Google Scholar] [CrossRef] [PubMed]
- Lagomarsino, A.; Agnelli, A.E.; Linquist, B.; Adviento-Borbe, M.A.; Agnelli, A.; Gavina, G.; Ravaglia, S.; Ferrara, R.M. Alternate Wetting and Drying of Rice Reduced CH4 Emissions but Triggered N2O Peaks in a Clayey Soil of Central Italy. Pedosphere 2016, 26, 533–548. [Google Scholar] [CrossRef]
- Chidthaisong, A.; Cha-Un, N.; Rossopa, B.; Buddaboon, C.; Kunuthai, C.; Sriphirom, P.; Towprayoon, S.; Tokida, T.; Padre, A.T.; Minamikawa, K. Evaluating the effects of alternate wetting and drying (AWD) on methane and nitrous oxide emissions from a paddy field in Thailand. Soil Sci. Plant Nutr. 2017, 64, 31–38. [Google Scholar] [CrossRef]
- Setyanto, P.; Pramono, A.; Adriany, T.A.; Susilawati, H.L.; Tokida, T.; Agnes, T.; Padre, A.T.; Minamikawa, K. Alternate wetting and drying reduces methane emission from a rice paddy in Central Java, Indonesia without yield loss. Soil Sci. Plant Nutr. 2017, 64, 23–30. [Google Scholar] [CrossRef]
- Balaine, N.; Carrijo, D.R.; Adviento-Borbe, M.A.; Linquist, B. Greenhouse Gases from Irrigated Rice Systems under Varying Severity of Alternate-Wetting and Drying Irrigation. Soil Sci. Soc. Am. J. 2019, 83, 1533–1541. [Google Scholar] [CrossRef]
- Sander, B.; Schneider, P.; Romasanta, R.; Samoy-Pascual, K.; Sibayan, E.; Asis, C.; Wassmann, R. Potential of Alternate Wetting and Drying Irrigation Practices for the Mitigation of GHG Emissions from Rice Fields: Two Cases in Central Luzon (Philippines). Agriculture 2020, 10, 350. [Google Scholar] [CrossRef]
- Hossain, M.M.; Islam, M.R. Farmers’ Participatory Alternate Wetting and Drying Irrigation Method Reduces Greenhouse Gas Emission and Improves Water Productivity and Paddy Yield in Bangladesh. Water 2022, 14, 1056. [Google Scholar] [CrossRef]
- Rejesus, R.M.; Palis, F.G.; Rodriguez, D.G.P.; Lampayan, R.M.; Bouman, B.A. Impact of the alternate wetting and drying (AWD) water-saving irrigation technique: Evidence from rice producers in the Philippines. Food Policy 2011, 36, 280–288. [Google Scholar] [CrossRef]
- Chiu, Y.-L.J.; Reba, M.L. Development of a Wireless Sensor Network for Tracking Flood Irrigation Management in Production-Sized Rice Fields in the Mid-South. Appl. Eng. Agric. 2020, 36, 703–715. [Google Scholar] [CrossRef]
- Pfitscher, L.L.; Bernardon, D.P.; Ferreira, A.A.B.; Heckler, M.V.T.; Thome, B.A.; Montani, P.D.B.; Fagundes, D.R. An automated irrigation system for rice cropping with remote supervision. In Proceedings of the 2011 International Conference on Power Engineering, Energy and Electrical Drives, Spain, Malaga, 11–13 May 2011. [Google Scholar]
- Jacob, P.; Simon, S. Development and deployment of wireless sensor network in paddy fields of Kuttanad. Int. J. Eng. Innov. Technol. 2012, 2, 84–88. [Google Scholar]
- IRRI; PhilRice. AutoMonPH—An IoT Based Irrigation Advisory Service. In A Comprehensive Solution for Landscape-Scale Sustainable Water Management in Rice; Synthesis Report 1.0; International Rice Research Institute (IRRI): LosBaños, Philippine; Philippine Rice Research Institute (PhilRice): Ligao, Philippine, 2020. [Google Scholar]
- Chiaradia, E.A.; Facchi, A.; Masseroni, D.; Ferrari, D.; Bischetti, G.B.; Gharsallah, O.; De Maria, S.C.; Rienzner, M.; Naldi, E.; Romani, M.; et al. An integrated, multisensor system for the continuous monitoring of water dynamics in rice fields under different irrigation regimes. Environ. Monit. Assess. 2015, 187, 586. [Google Scholar] [CrossRef] [PubMed]
- Xiao, D.; Feng, J.; Wang, N.; Luo, X.; Hu, Y. Integrated soil moisture and water depth sensor for paddy fields. Comput. Electron. Agric. 2013, 98, 214–221. [Google Scholar] [CrossRef]
- Ramirez, R.C.; Agulto, E.S.; Glaser, S.D.; Zhang, Z.; Hermocilla, J.C.; Ella, V.B. DEvelopment of real-time wireless sensor network—based water information system for efficient irrigation of upland and lowland crop production systems. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Online, 25–26 February 2022. [Google Scholar] [CrossRef]
- Kawakami, Y.; Furuta, T.; Nakagawa, H.; Kitamura, T.; Kurosawa, K.; Kogami, K.; Tajino, N.; Tanaka, M. Rice cultivation support system equipped with water-level sensor system. In Proceedings of the 5th IFAC Conference on Sensing, Control and Automation Technologies for Agriculture AGRICONTROL 2016, Seattle, WA, USA, 14–17 August 2016; Volume 49, pp. 143–148. [Google Scholar]
- Pilling, D. HCSR04. 2015. Available online: https://www.davidpilling.com/wiki/index.php/HomePage (accessed on 22 January 2022).













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cruz, K.M.S.D.; Ella, V.B.; Suministrado, D.C.; Pereira, G.S.; Agulto, E.S. A Low-Cost Wireless Sensor for Real-Time Monitoring of Water Level in Lowland Rice Field under Alternate Wetting and Drying Irrigation. Water 2022, 14, 4128. https://doi.org/10.3390/w14244128
Cruz KMSD, Ella VB, Suministrado DC, Pereira GS, Agulto ES. A Low-Cost Wireless Sensor for Real-Time Monitoring of Water Level in Lowland Rice Field under Alternate Wetting and Drying Irrigation. Water. 2022; 14(24):4128. https://doi.org/10.3390/w14244128
Chicago/Turabian StyleCruz, Kristelle Marie S. Dela, Victor B. Ella, Delfin C. Suministrado, Gamiello S. Pereira, and Edzel S. Agulto. 2022. "A Low-Cost Wireless Sensor for Real-Time Monitoring of Water Level in Lowland Rice Field under Alternate Wetting and Drying Irrigation" Water 14, no. 24: 4128. https://doi.org/10.3390/w14244128
APA StyleCruz, K. M. S. D., Ella, V. B., Suministrado, D. C., Pereira, G. S., & Agulto, E. S. (2022). A Low-Cost Wireless Sensor for Real-Time Monitoring of Water Level in Lowland Rice Field under Alternate Wetting and Drying Irrigation. Water, 14(24), 4128. https://doi.org/10.3390/w14244128