The Role of ICT in Improving Sequential Decisions for Water Management in Agriculture


Abstract
1. Introduction
2. Background
- (a)
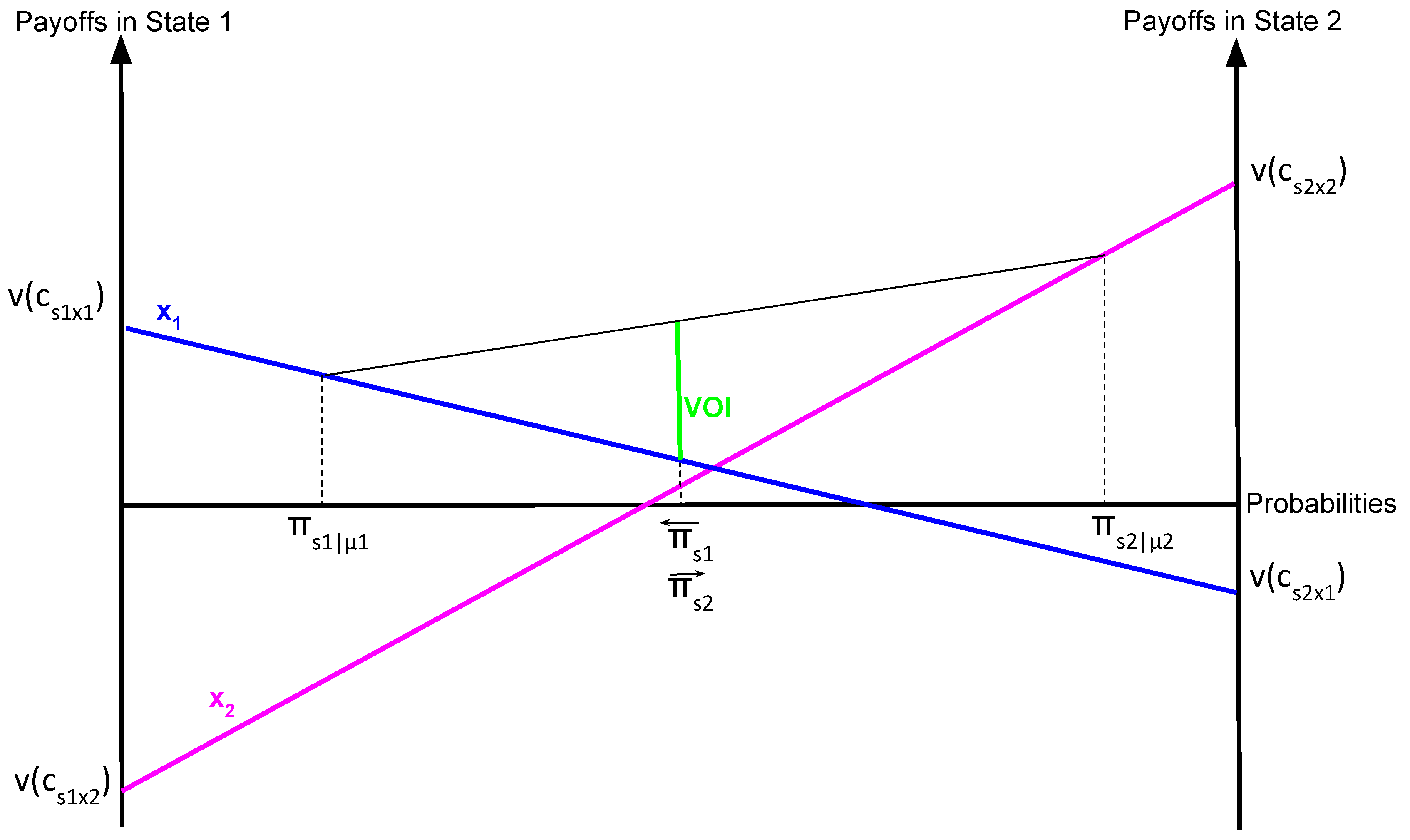
- content of information: the WA must be able to implement the additional information in the decision process; if the WA is not able to act upon information, it has no value for it;
- (b)
- accuracy of information: the more accurate the information is, the smaller the risk of failures and the higher the VOI; imprecise information is not capable of inducing any change in WA beliefs;
- (c)
- timing of information provision: information must be provided at the right time in the decision process; late messages have no value.
- (a)
- uncertainty in the decision process: the higher the climate variability, the higher the benefits brought by information;
- (b)
- the stake in the decision: the higher the variance of decision outcome, the more the WA will be willing to use information for reducing uncertainty.
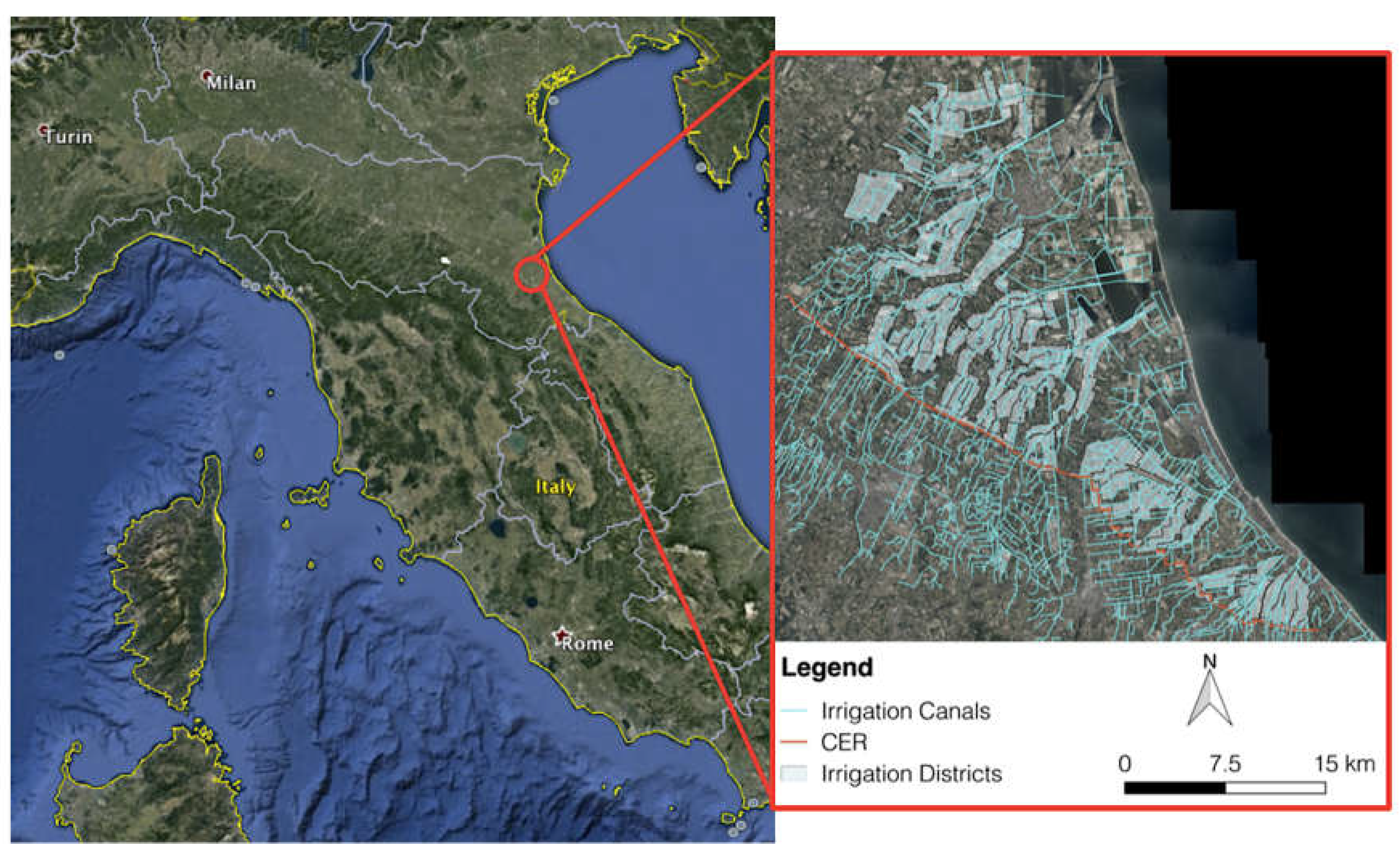
3. Case Study
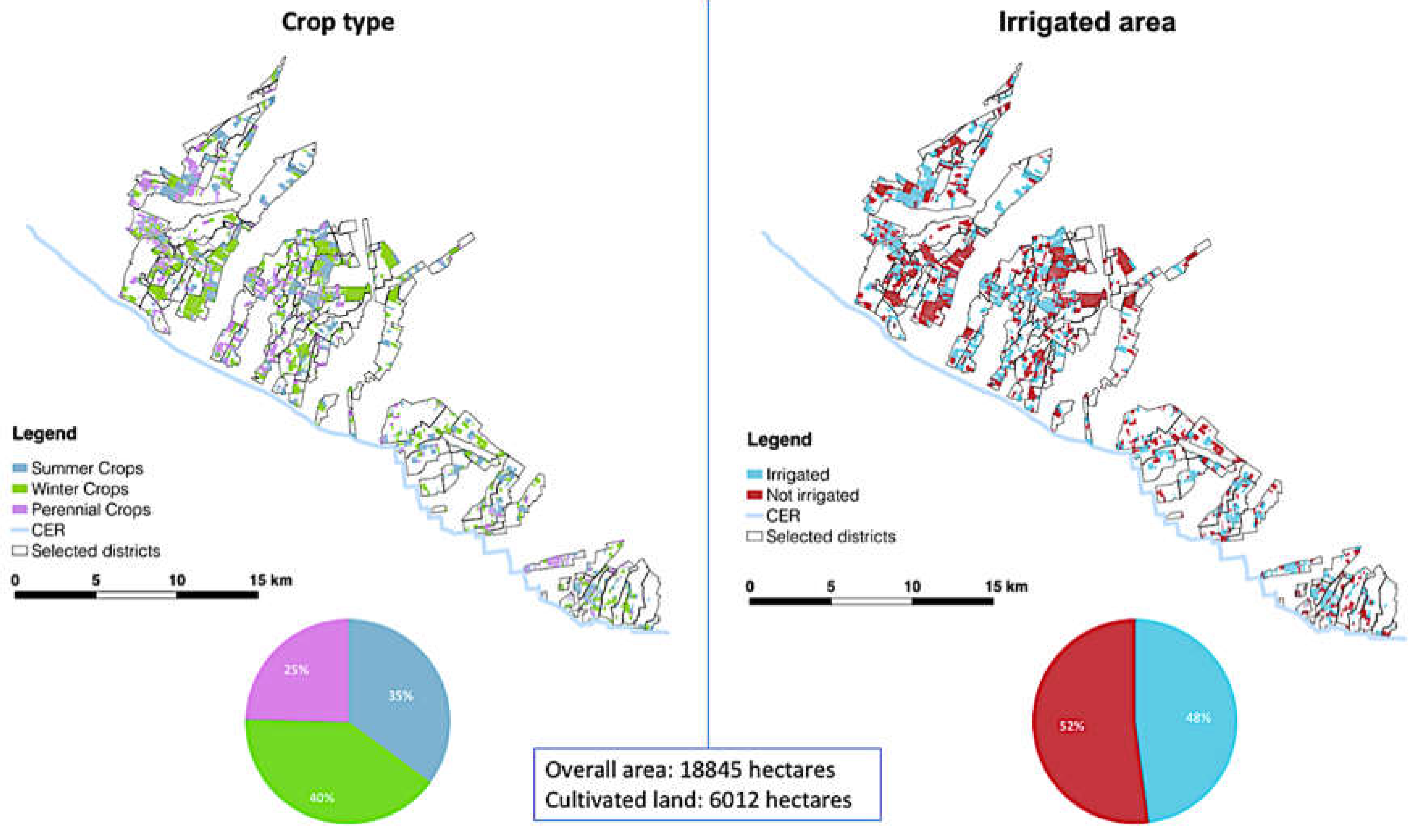
3.1. Description of the Case Study Area
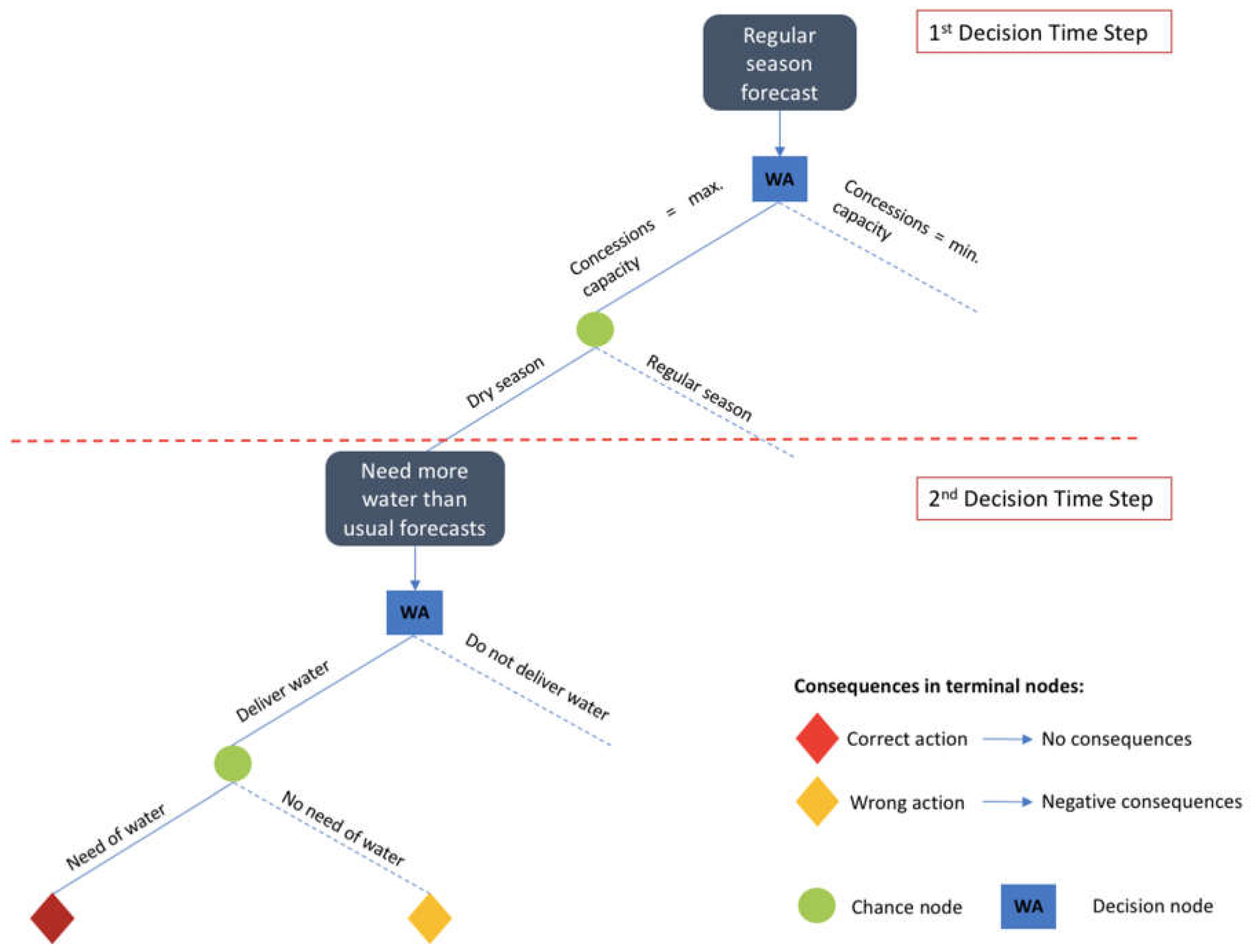
3.2. Management Systems and Information Requirements
3.3. Usability of the MOSES Information Service
- the wrong prediction of a regular season: the WA receives a message specifying a regular season will emerge, but eventually the season will be dry;
- the wrong prediction of a dry season: the WA receives a message specifying a dry season will emerge, but eventually the season will be regular.
- the wrong prediction that water requirements are above zero: the WA receives a message specifying that water for irrigation is needed in a specific sector of the network, but eventually water for irrigation is not needed;
- the wrong prediction that water requirements equal zero: the WA receives a message specifying no water demand for irrigation in a specific sector of the network, but eventually water for irrigation is needed.
4. Methodology and Empirical Application
4.1. Definition of the Model
4.2. Data Collection and Assessment Procedure
5. Results
6. Discussion
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendices A1 and A2: Data Used to Estimate Decision Outcomes

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| District Name | Wheat (ha) | Kiwifruit (ha) | Corn (ha) | Alfalfa (ha) | Apple (ha) | Peach (ha) | Vineyard (ha) | Total (ha) |
|---|---|---|---|---|---|---|---|---|
| Acquara alta | 0.0 | 1.2 | 81.3 | 22.0 | 0.0 | 0.0 | 0.4 | 104.9 |
| Baldone | 0.0 | 0.0 | 35.0 | 9.7 | 0.0 | 0.0 | 0.0 | 44.7 |
| Cannuzzo | 0.4 | 3.1 | 59.8 | 47.7 | 5.6 | 4.2 | 0.6 | 121.4 |
| Cappella | 0.0 | 0.0 | 18.3 | 10.3 | 0.0 | 8.7 | 0.0 | 37.4 |
| Carpena | 3.1 | 2.3 | 69.7 | 350.7 | 10.8 | 20.8 | 80.5 | 537.9 |
| Cavaticcia | 0.0 | 0.0 | 3.3 | 2.0 | 0.0 | 0.2 | 0.2 | 5.7 |
| Cervaro | 0.0 | 0.0 | 14.7 | 10.7 | 0.0 | 0.0 | 0.0 | 25.4 |
| Dismano est | 0.0 | 0.0 | 9.9 | 4.2 | 0.0 | 3.7 | 0.0 | 17.8 |
| Fiumicello superiore | 0.0 | 1.6 | 104.6 | 96.0 | 1.2 | 17.4 | 0.7 | 221.4 |
| Fossatone del bevano | 0.0 | 0.0 | 7.7 | 8.7 | 0.0 | 0.0 | 0.0 | 16.4 |
| Fossatone del rigoncello | 1.7 | 0.0 | 20.0 | 12.6 | 0.0 | 0.0 | 0.0 | 34.3 |
| Lagnano | 0.0 | 0.0 | 0.0 | 0.6 | 0.0 | 0.0 | 0.0 | 0.6 |
| Lama superiore | 0.0 | 0.0 | 13.3 | 83.8 | 0.5 | 3.2 | 6.1 | 106.9 |
| Lupara | 0.0 | 0.0 | 22.4 | 23.1 | 0.0 | 5.8 | 0.0 | 51.3 |
| Masiera | 1.6 | 0.0 | 1.6 | 5.6 | 0.0 | 0.0 | 0.0 | 8.7 |
| Matrice vecchia | 0.0 | 0.0 | 11.1 | 0.0 | 0.0 | 0.0 | 0.0 | 11.1 |
| Mesola del montaletto | 0.0 | 0.0 | 7.8 | 29.9 | 0.0 | 0.0 | 0.0 | 37.7 |
| Olca | 0.0 | 1.8 | 32.4 | 23.3 | 11.0 | 5.0 | 1.2 | 74.7 |
| Pradazzi | 0.0 | 0.0 | 48.1 | 35.1 | 0.0 | 11.5 | 0.0 | 94.7 |
| Re | 0.0 | 0.5 | 27.7 | 21.2 | 2.8 | 0.3 | 20.3 | 72.8 |
| Rigoncello | 0.0 | 0.0 | 8.8 | 18.2 | 0.0 | 0.0 | 0.0 | 27.0 |
| Rio della valle | 0.0 | 0.0 | 28.1 | 22.2 | 0.0 | 0.0 | 0.0 | 50.3 |
| Ronco grosso | 0.0 | 0.0 | 22.4 | 2.0 | 0.0 | 3.4 | 0.0 | 27.8 |
| Salto | 0.0 | 0.0 | 2.4 | 1.7 | 0.0 | 0.0 | 0.0 | 4.1 |
| Saraceta | 0.0 | 0.0 | 5.5 | 21.2 | 0.0 | 0.0 | 0.0 | 26.7 |
| Spadolaro pieve quinta | 0.0 | 0.0 | 0.0 | 8.8 | 0.0 | 0.0 | 1.9 | 10.7 |
| Tratturo fosso ghiaia | 0.0 | 0.0 | 24.0 | 8.5 | 0.5 | 0.9 | 0.4 | 34.3 |
| Vecchio | 0.0 | 0.0 | 4.8 | 12.0 | 0.0 | 0.0 | 0.0 | 16.8 |
| Vena grande | 0.0 | 0.0 | 3.1 | 0.9 | 0.0 | 0.0 | 0.0 | 4.0 |
| Veneziana | 0.0 | 0.0 | 51.7 | 60.8 | 0.0 | 0.0 | 2.5 | 115.0 |
| Via cupa | 0.8 | 0.0 | 42.4 | 103.7 | 0.8 | 26.1 | 58.7 | 232.5 |
| Violone della mesola | 0.0 | 0.0 | 16.8 | 9.8 | 0.0 | 7.4 | 0.0 | 34.0 |
| Total | 9.3 | 10.5 | 818.8 | 1079.4 | 33.2 | 118.6 | 173.5 | 2243.2 |
| District Name | Water Saving (m3) | |
|---|---|---|
| Regular Season | Dry Season | |
| Acquara alta | 3474330 | 1661437 |
| Baldone | 501248 | 410329 |
| Cannuzzo | 174165 | 214274 |
| Cappella | 329723 | 530877 |
| Carpena | 178205 | 132544 |
| Cavaticcia | 632932 | 544847 |
| Cervaro | 0 | 0 |
| Dismano est | 186174 | 155422 |
| Fiumicello superiore | 3297819 | 1648666 |
| Fossatone del bevano | 495168 | 513337 |
| Fossatone del rigoncello | 937606 | 854854 |
| Lagnano | 276432 | 211418 |
| Lama superiore | 185116 | 65136 |
| Lupara | 492453 | 442914 |
| Masiera | 0 | 0 |
| Matrice vecchia | 873620 | 810796 |
| Mesola del montaletto | 790252 | 661334 |
| Olca | 644390 | 903778 |
| Pradazzi | 0 | 0 |
| Re | 507138 | 406068 |
| Rigoncello | 675181 | 620072 |
| Rio della valle | 0 | 0 |
| Ronco grosso | 283620 | 120797 |
| Salto | 0 | 0 |
| Saraceta | 219990 | 208552 |
| Spadolaro pieve quinta | 403868 | 140262 |
| Tratturo fosso ghiaia | 323829 | 121179 |
| Vecchio | 48992 | 41077 |
| Vena grande | 309933 | 246392 |
| Veneziana | 623470 | 612185 |
| Via cupa | 690420 | 343736 |
| Violone della mesola | 266088 | 251594 |
| Total | 18759766 | 13728732 |
Appendix A3: Land Allocation under Different Management Decisions
| - | Concessions to the Minimum Operational Capacity | Concessions to the Average Operational Capacity | Concessions to the Maximum Operational Capacity | ||||||
|---|---|---|---|---|---|---|---|---|---|
| District Name | Perennial Crops (ha) | Irr. Seasonal Crops (ha) | Dry Seasonal Crops (ha) | Perennial Crops (ha) | Irr. Seasonal Crops (ha) | Dry Seasonal Crops (ha) | Perennial Crops (ha) | Irr. Seasonal Crops (ha) | Dry Seasonal Crops (ha) |
| Acquara alta | 14.6 | 22.0 | 122.8 | 14.6 | 31.5 | 113.3 | 14.6 | 40.9 | 103.9 |
| Baldone | 3.8 | 23.3 | 16.9 | 3.8 | 33.2 | 6.9 | 3.8 | 43.2 | 0.0 |
| Cannuzzo | 18.7 | 14.8 | 47.4 | 18.7 | 21.2 | 41.0 | 18.7 | 27.5 | 34.6 |
| Cappella | 2.4 | 37.2 | 49.6 | 2.4 | 53.2 | 33.7 | 2.4 | 69.2 | 17.7 |
| Cavaticcia | 3.5 | 3.8 | 29.3 | 3.5 | 5.4 | 27.7 | 3.5 | 7.0 | 26.1 |
| Dismano est | 6.0 | 24.8 | 77.4 | 6.0 | 35.5 | 66.8 | 6.0 | 46.1 | 56.2 |
| Fiumicello superiore | 147.3 | 180.4 | 826.2 | 147.3 | 257.7 | 748.9 | 147.3 | 335.0 | 671.6 |
| Fossatone del bevano | 2.7 | 0.6 | 11.7 | 2.7 | 0.8 | 11.5 | 2.7 | 1.1 | 11.2 |
| Fossatone del rigoncello | 0.0 | 19.2 | 17.2 | 0.0 | 27.4 | 9.0 | 0.0 | 35.6 | 0.8 |
| Lagnano | 0.0 | 0.0 | 1.4 | 0.0 | 0.0 | 1.4 | 0.0 | 0.0 | 1.4 |
| Lama superiore | 73.4 | 25.1 | 211.5 | 73.4 | 35.9 | 200.7 | 73.4 | 46.6 | 189.9 |
| Lupara | 1.6 | 19.6 | 31.1 | 1.6 | 27.9 | 22.7 | 1.6 | 36.3 | 14.4 |
| Masiera | 1.2 | 18.5 | 26.4 | 1.2 | 26.4 | 18.4 | 1.2 | 34.3 | 10.5 |
| Matrice vecchia | 0.1 | 8.9 | 20.9 | 0.1 | 12.7 | 17.1 | 0.1 | 16.5 | 13.3 |
| Mesola del montaletto | 5.0 | 14.5 | 41.4 | 5.0 | 20.7 | 35.2 | 5.0 | 26.9 | 29.0 |
| Olca | 40.6 | 3.9 | 13.1 | 40.6 | 5.6 | 11.4 | 40.6 | 7.2 | 9.7 |
| Pradazzi-rio della valle | 17.5 | 56.7 | 79.5 | 17.5 | 81.0 | 55.3 | 17.5 | 105.2 | 31.0 |
| Re | 13.4 | 8.2 | 22.4 | 13.4 | 11.8 | 18.8 | 13.4 | 15.3 | 15.3 |
| Rigoncello | 2.2 | 8.8 | 26.1 | 2.2 | 12.6 | 22.3 | 2.2 | 16.4 | 18.6 |
| Ronco grosso | 74.9 | 130.0 | 824.3 | 74.9 | 185.8 | 768.6 | 74.9 | 241.5 | 712.9 |
| Salto | 0.0 | 3.3 | 6.7 | 0.0 | 4.7 | 5.3 | 0.0 | 6.1 | 3.9 |
| Spadolaro pieve quinta | 35.1 | 22.7 | 90.1 | 35.1 | 32.4 | 80.4 | 35.1 | 42.1 | 70.7 |
| Tratturo fosso ghiaia | 110.0 | 67.5 | 161.3 | 110.0 | 96.5 | 132.3 | 110.0 | 125.4 | 103.4 |
| Vecchio | 1.5 | 6.7 | 12.7 | 1.5 | 9.5 | 9.9 | 1.5 | 12.4 | 7.0 |
| Vena grande | 0.0 | 2.8 | 1.2 | 0.0 | 4.0 | 0.0 | 0.0 | 5.2 | 0.0 |
| Veneziana | 8.6 | 48.7 | 164.8 | 8.6 | 69.6 | 143.9 | 8.6 | 90.5 | 123.0 |
| Via cupa | 199.8 | 184.6 | 373.6 | 199.8 | 263.7 | 294.5 | 199.8 | 342.8 | 215.4 |
| Violone della mesola | 7.1 | 0.0 | 7.3 | 7.1 | 0.0 | 7.3 | 7.1 | 0.0 | 7.3 |
| Total | 790.8 | 956.6 | 3314.4 | 790.8 | 1366.6 | 2904.4 | 790.8 | 1776.6 | 2494.4 |
References
- Bizikova, L.; Burch, S.; Cohen, S.; Robinson, J. Linking sustainable development with climate change adaptation and mitigation. In Ethics and Human Security; O’Brien, K., Clair, A.St., Kristoffersen, B., Eds.; Cambridge University Press: New York, NY, USA, 2010; pp. 157–179. [Google Scholar]
- Vogel, J.; Letson, D.; Herrick, C. A framework for climate services evaluation and its application to the Caribbean Agrometeorological Initiative. Clim. Serv. 2017, 6, 65–76. [Google Scholar] [CrossRef]
- Hallstrom, D.G. Interannual climate variation, climate prediction, and agricultural trade: The costs of surprise versus variability. Rev. Int. Econ. 2004, 12, 441–455. [Google Scholar] [CrossRef]
- Meza, F.J.; Hansen, J.W.; Osgood, D. Economic value of seasonal climate forecasts for agriculture: Review of ex-ante assessments and recommendations for future research. J. Appl. Meteorol. Clim. 2008, 47, 1269–1286. [Google Scholar] [CrossRef]
- Fernandez, M.A.; Huang, P.; McCarl, B.; Mehta, V. Value of decadal climate variability information for agriculture in the Missouri River basin. Clim. Chang. 2016, 139, 517–533. [Google Scholar] [CrossRef]
- Deichmann, U.; Goyal, A.; Mishra, D. Will Digital technologies transform agriculture in developing countries? 2016. Available online: http://doi.org/10.1596/1813-9450-7669 (accessed on 22 August 2018).
- Guerra, E.; Ventura, F.; Viaggi, D.; Snyder, R.L. Can crop coefficients improve the economics of irrigated crops? Acta Hortic. 2017, 1150, 515–520. [Google Scholar] [CrossRef]
- Tyrychtr, J.; Junek, P.; Vostrovský, V.; Vasilenko, A.; Nouza, J. Towards framework for economic value of analytical systems in agriculture: proposal of research. Agris on-line Pap. Econ. Inform. 2016, VIII, 103–109. [Google Scholar] [CrossRef]
- Aker, J.C.; Ghosh, I.; Burrell, J. The promise (and pitfalls) of ICT for agriculture initiatives. Agric. Econ. 2016, 47, 35–48. [Google Scholar] [CrossRef]
- Nakasone, E.; Torero, M. A text message away: ICTs as a tool to improve food security. Agric. Econ. 2016, 47, 49–59. [Google Scholar] [CrossRef]
- Martin, W. Agriculture in an interconnected world. Agric. Econ. 2016, 47, 3–6. [Google Scholar] [CrossRef]
- Macauley, M.K. The value of information: Measuring the contribution of space-derived earth science data to resource management. Space Policy 2006, 22, 274–282. [Google Scholar] [CrossRef]
- Keisler, J.M.; Collier, Z.A.; Chu, E.; Sinatra, N.; Linkov, I. Value of information analysis: The state of application. Environ. Syst. Decis. 2014, 34, 3–23. [Google Scholar] [CrossRef]
- Smith, J.E.; Ulu, C. Risk aversion, information acquisition, and technology adoption. Oper. Res. 2017, 65, 1011–1028. [Google Scholar] [CrossRef]
- Bikhchandani, S.; Hirshleifer, J.; Riley, J.G. The Analytics of Uncertainty and Information; Cambridge University Press: New York, NY, USA, 2013. [Google Scholar]
- Hardaker, J.B.; Huirne, R.B.M.; Anderson, J.R.; Lien, G. Coping with Risk in Agriculture: Applied Decision Analysis; CAB International: Wallingford, UK, 2015. [Google Scholar]
- Crean, J.; Parton, K.; Mullen, J.; Hayman, P. Valuing seasonal climate forecasts in a state-contingent manner. Aust. J. Agric. Resour. Econ. 2015, 59, 61–77. [Google Scholar] [CrossRef]
- Bouma, J.A.; van der Woerd, H.J.; Kuik, O.J. Assessing the value of information for water quality management in the North Sea. J. Environ. Manage. 2009, 90, 1280–1288. [Google Scholar] [CrossRef] [PubMed]
- Hardaker, J.B.; Lien, G. Probabilities for decision analysis in agriculture and rural resource economics: The need for a paradigm change. Agric. Syst. 2010, 103, 345–350. [Google Scholar] [CrossRef]
- Galioto, F.; Raggi, M.; Viaggi, D. Assessing the potential economic viability of precision irrigation: a theoretical analysis and pilot empirical evaluation. Water 2017, 9, 990. [Google Scholar] [CrossRef]
- Kusunose, Y.; Mahmood, R. Imperfect forecasts and decisionmaking in agriculture. Agric. Syst. 2016, 146, 103–110. [Google Scholar] [CrossRef]
- Plant, R.E. Site-specific management: the application of information technology to crop production. Comput. Electron. Agric. 2001, 30, 9–29. [Google Scholar] [CrossRef]
- Furman, C.; Roncoli, C.; Crane, T.; Hoogenboom, G. Beyond the “fit”: Introducing climate forecasts among organic farmers in Georgia (United States). Clim. Chang. 2011, 109, 791–799. [Google Scholar] [CrossRef]
- Cash, D.W.; Borck, J.C.; Patt, A.G. Countering the loading-dock approach to linking science and decision making: comparative analysis of El Niño/Southern Oscillation (ENSO) forecasting systems. Sci. Technol. Hum. Values 2006, 31, 465–494. [Google Scholar] [CrossRef]
- Denton, F.; Wilbanks, T.J.; Abeysinghe, A.C.; Burton, I.; Gao, Q.; Warner, K.; Masui, T.; O’Brien, K.; Lemos, M.C. Climate-resilient pathways: adaptation, mitigation, and sustainable development. Clim. Chang. 2014, 1101–1131. [Google Scholar]







| MOSES Crop Classification | |||
|---|---|---|---|
| Irrigated | Not Irrigated | ||
| Observed Data on Land Use | Irrigated | 0.66 | 0.41 |
| Not irrigated | 0.34 | 0.59 | |
| MOSES Irrigation Forecast | |||
|---|---|---|---|
| Water Requirements Above the Threshold | Water Requirements Below the Threshold | ||
| Observed Data | Water requirements above the threshold | 0.80 | 0.06 |
| Water requirements below the threshold | 0.20 | 0.94 | |
| States | ||||||
|---|---|---|---|---|---|---|
| s’1 | s’2 | |||||
| s’’1 | s’’2 | s’’1 | s’’2 | |||
| Actions | x’1 | x’’1 | - | −608,181 | −252,155 | −1,112,491 |
| x’’2 | −464,777 | - | −366,491 | −252,155 | ||
| x’2 | x’’1 | −252,155 | −1,112,491 | - | −860,336 | |
| x’’2 | −366,491 | −252,155 | −728,569 | - | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cavazza, F.; Galioto, F.; Raggi, M.; Viaggi, D. The Role of ICT in Improving Sequential Decisions for Water Management in Agriculture. Water 2018, 10, 1141. https://doi.org/10.3390/w10091141
Cavazza F, Galioto F, Raggi M, Viaggi D. The Role of ICT in Improving Sequential Decisions for Water Management in Agriculture. Water. 2018; 10(9):1141. https://doi.org/10.3390/w10091141
Chicago/Turabian StyleCavazza, Francesco, Francesco Galioto, Meri Raggi, and Davide Viaggi. 2018. "The Role of ICT in Improving Sequential Decisions for Water Management in Agriculture" Water 10, no. 9: 1141. https://doi.org/10.3390/w10091141
APA StyleCavazza, F., Galioto, F., Raggi, M., & Viaggi, D. (2018). The Role of ICT in Improving Sequential Decisions for Water Management in Agriculture. Water, 10(9), 1141. https://doi.org/10.3390/w10091141