
Biomimetic Soft Actuator with Deformation and Motion Driven by Near-Infrared Light

Abstract

1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Surface Functionalization of MWCNTs
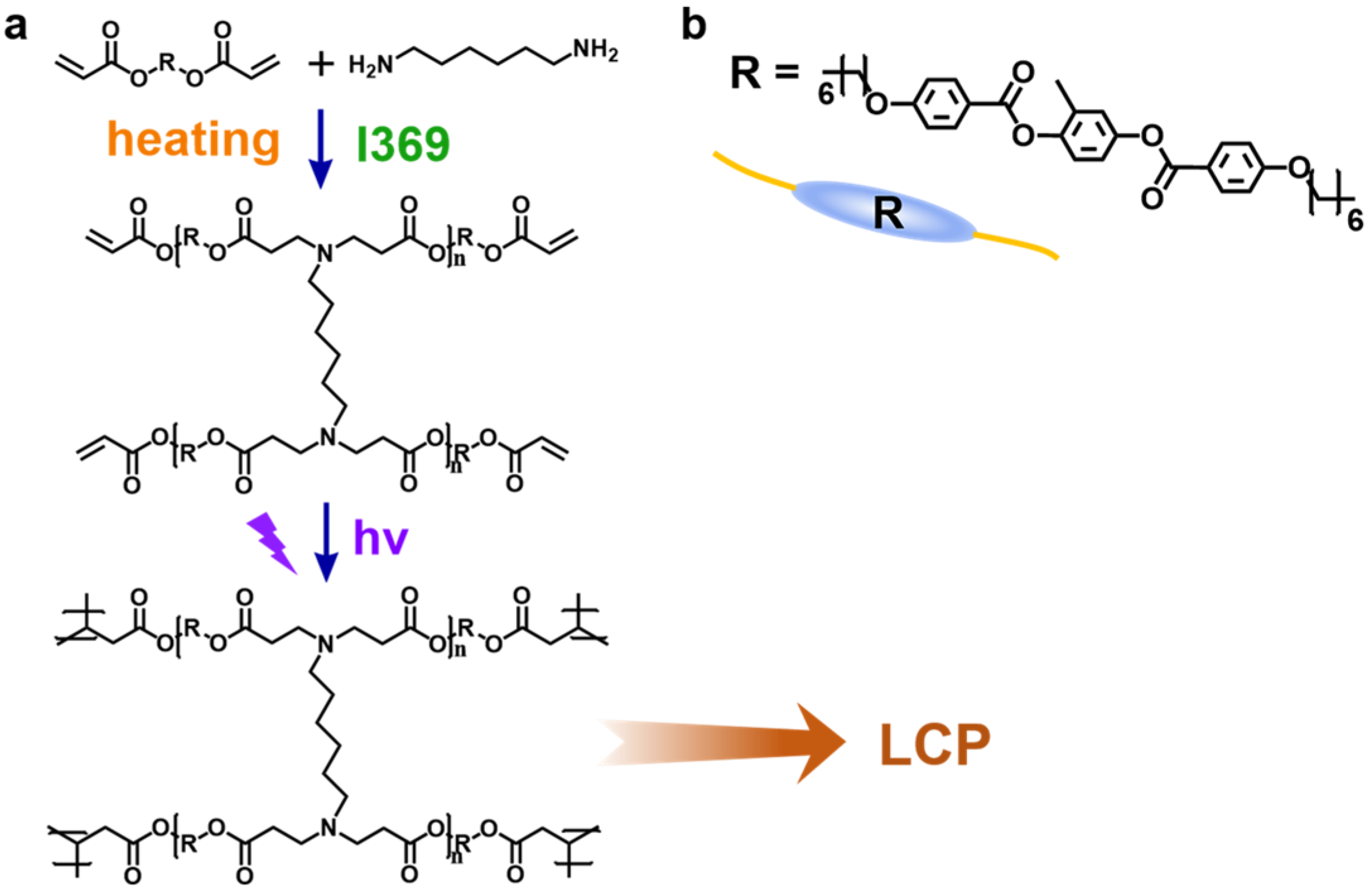
2.3. Preparation of the MWCNT/LCP Nanocomposites
2.4. Fabrication of the MWCNT/LCP S-Actuators
2.5. Deformation and Motion Performance Measurement of MWCNT/LCP S-Actuators
2.6. Characterization
3. Results
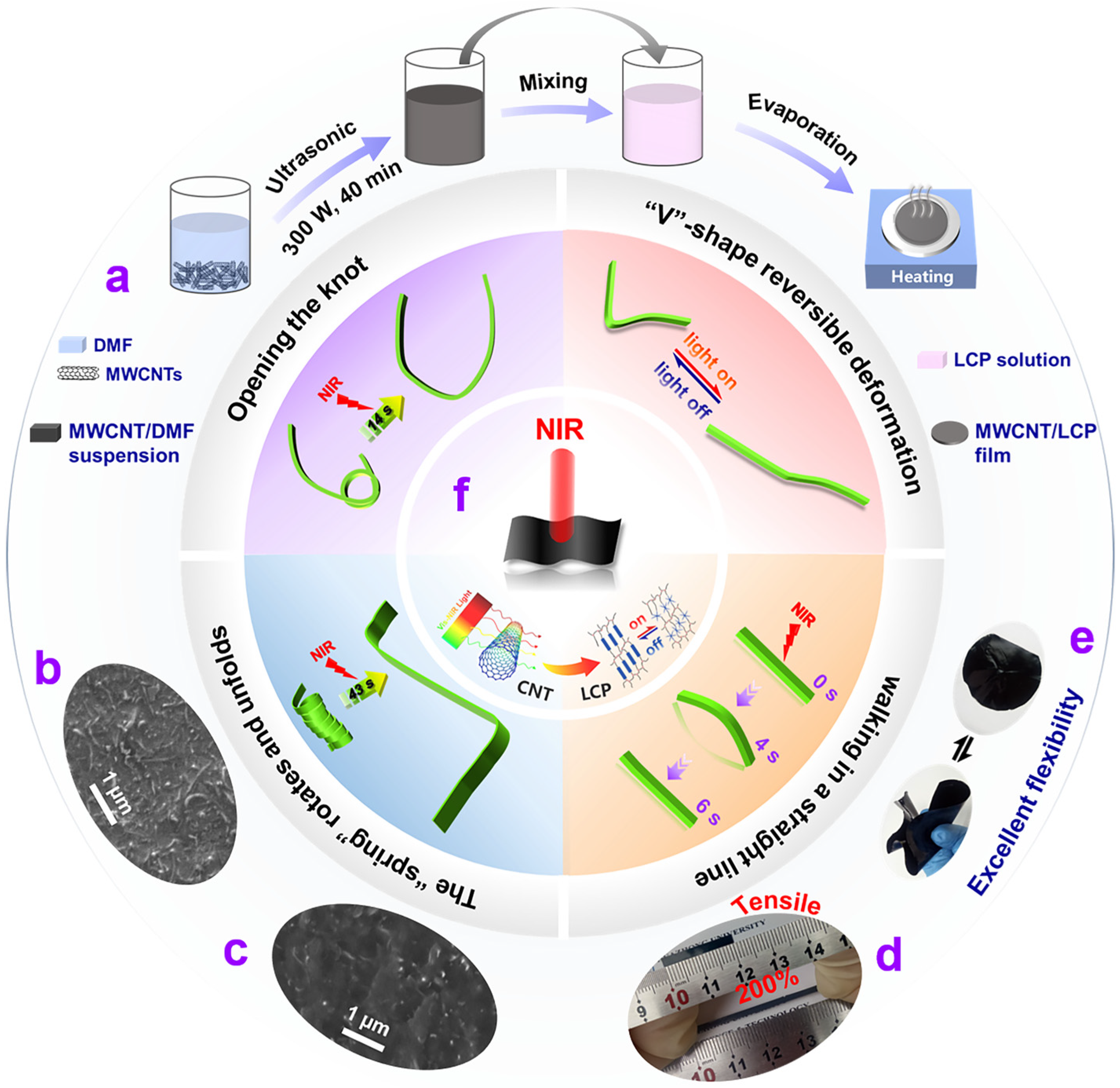
3.1. Overview of the Functions and Properties of MWCNT/LCP Nanocomposites
3.2. The Mechanism of MWCNT/LCP S-Actuators Deformation and Movement
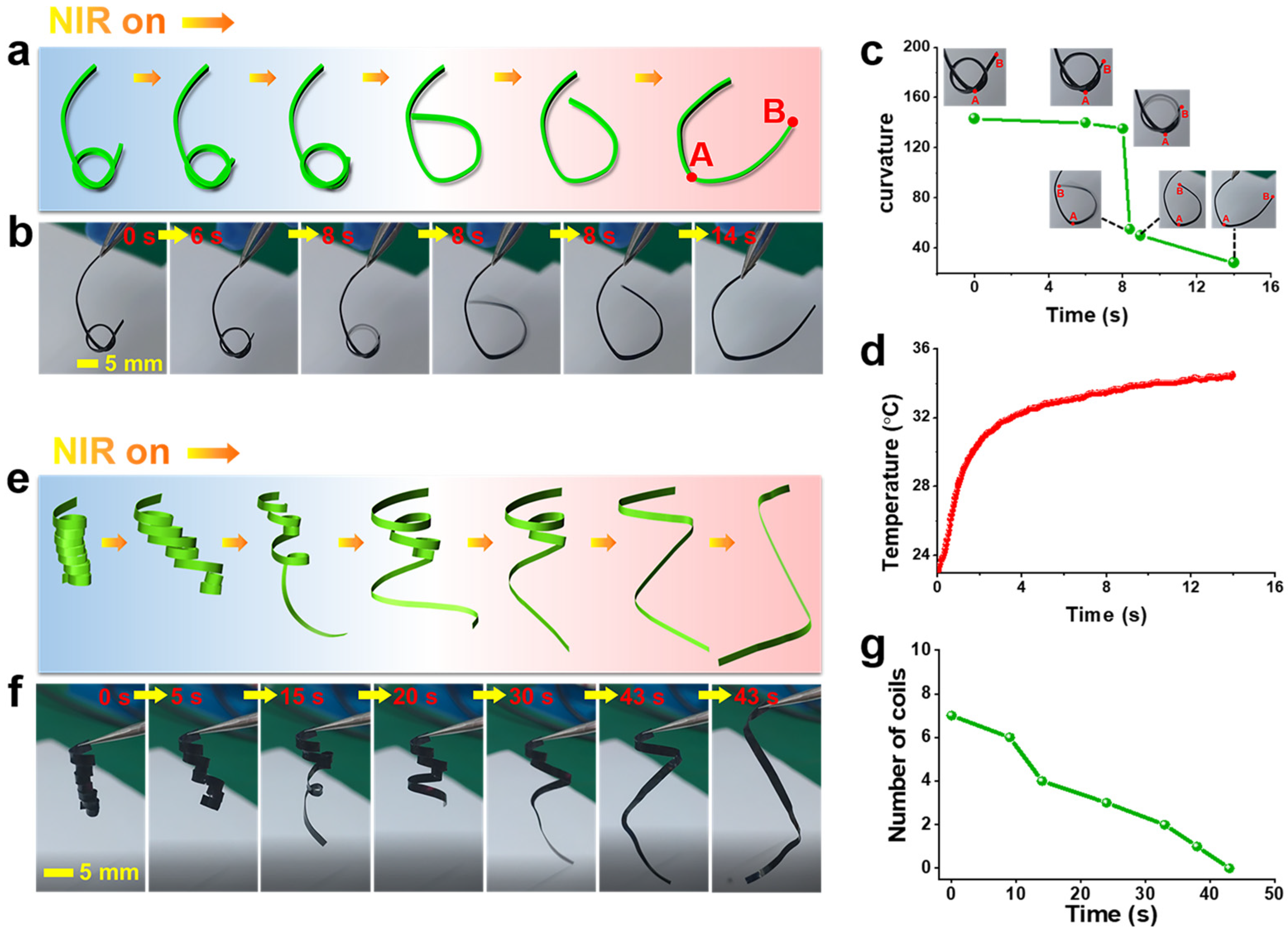
3.3. Performance of MWCNT/LCP S-Actuators Deformation and Motion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, S.; Lee, S.N.; Melvin, A.A.; Choi, J.W. Stimuli-responsive polymer actuator for soft robotics. Polymers 2024, 16, 2660. [Google Scholar] [CrossRef] [PubMed]
- Xue, P.; Bisoyi, H.K.; Chen, Y.; Zeng, H.; Yang, J.; Yang, X.; Lv, P.; Zhang, X.; Priimagi, A.; Wang, L.; et al. Near-infrared light-driven shape-morphing of programmable anisotropic hydrogels enabled by mxene nanosheets. Angew. Chem. Int. Edit. 2021, 60, 3390–3396. [Google Scholar] [CrossRef] [PubMed]
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft robot perception using embedded soft sensors and recurrent neural networks. Sci. Robot. 2019, 4, eaav1488. [Google Scholar] [CrossRef]
- Seelinger, D.; Georges, H.; Schäfer, J.L.; Huong, J.; Tajima, R.; Mittelstedt, C.; Biesalski, M. Pinecone-inspired humidity-responsive paper actuators with bilayer structure. Polymers 2024, 16, 1402. [Google Scholar] [CrossRef]
- Shah, D.S.; Powers, J.P.; Tilton, L.G.; Kriegman, S.; Bongard, J.; Kramer-Bottiglio, R. A soft robot that adapts to environments through shape change. Nat. Mach. Intell. 2024, 3, 51–59, Erratum in Nat. Mach. Intell. 2024, 6, 493. [Google Scholar] [CrossRef]
- Hu, Z.; Li, Y.; Lv, J. Phototunable self-oscillating system driven by a self-winging fiber actuator. Nat. Commun. 2021, 12, 3211. [Google Scholar] [CrossRef]
- Apsite, I.; Salehi, S.; Ionov, L. Materials for smart soft actuator systems. Chem. Rev. 2022, 122, 1349–1415. [Google Scholar] [CrossRef]
- Li, M.; Pal, A.; Aghakhani, A.; Pena-Franncesch, A.; Sitti, M. Soft actuators for real-world applications. Nature 2021, 7, 235–249. [Google Scholar] [CrossRef]
- Won, P.; Kim, K.K.; Kim, H.; Park, J.J.; Ha, I.; Shin, J.; Jung, J.; Cho, H.; Kwon, J.; Lee, H.; et al. Transparent soft actuators/sensors and camouflage skins for imperceptible soft robotics. Adv. Mater. 2021, 33, 2002397. [Google Scholar] [CrossRef]
- Li, X.; Fan, D.; Sun, Y.; Xu, L.; Li, D.; Sun, B.; Nong, S.; Li, W.; Zhang, S.; Hu, B.; et al. Porous magnetic soft grippers for fast and gentle grasping of delicate living objects. Adv. Mater. 2024, 36, 2409173. [Google Scholar] [CrossRef]
- Goh, G.D.; Goh, G.L.; Lyu, Z.; Ariffin, M.Z.; Yeong, W.Y.; Lum, G.Z.; Campolo, D.; Han, B.S.; Wong, H.Y.A. 3D printing of robotic soft grippers: Toward smart actuation and sensing. Adv. Mater. Technol. 2022, 7, 2101672. [Google Scholar] [CrossRef]
- Li, L.; Xie, F.; Wang, T.; Wang, G.; Tian, Y.; Jin, T.; Zhang, Q. Stiffness-tunable soft gripper with soft-rigid hybrid actuation for versatile manipulations. Soft Robot. 2022, 9, 583–596. [Google Scholar] [CrossRef] [PubMed]
- Patel, D.K.; Huang, X.; Luo, Y.; Mungekar, M.; Jawed, M.K.; Yao, L.; Majidi, C. Highly dynamic bistable soft actuator for reconfigurable multimodal soft robots. Adv. Mater. Technol. 2023, 8, 2201259. [Google Scholar] [CrossRef]
- Lou, P.; Tian, L.; Yao, M.; Nie, J.; He, Y. Photothermal-driven crawlable soft robot with bionic earthworm-like bristle structure. Adv. Intell. Syst. 2024, 6, 2300540. [Google Scholar] [CrossRef]
- Tang, Y.; Li, M.; Wang, T.; Dong, X.; Hu, W.; Sitti, M. Wireless miniature magnetic phase-change soft actuators. Adv. Mater. 2022, 34, 2204185. [Google Scholar] [CrossRef]
- Zhao, T.; Zhang, Y.; Fan, Y.; Wang, J.; Jiang, H.; Lv, J. Light-modulated liquid crystal elastomer actuator with multimodal shape morphing and multifunction. J. Mater. Chem. C 2022, 10, 3796–3803. [Google Scholar] [CrossRef]
- Qiu, W.; Li, Z.; Wang, G.; Peng, Y.; Zhang, M.; Wang, X.; Zhong, J.; Lin, L. A moisture-resistant soft actuator with low driving voltages for haptic stimulations in virtual games. ACS Appl. Mater. Interfaces 2022, 14, 31257–31266. [Google Scholar] [CrossRef]
- Yu, Z.; Shang, J.; Shi, Q.; Xia, Y.; Zhai, D.H.; Wang, H.; Huang, Q.; Fukuda, T. Electrically controlled aquatic soft actuators with desynchronized actuation and light-mediated reciprocal locomotion. ACS Appl. Mater. Interfaces 2022, 14, 12936–12948. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, J.; Zhang, X.; Feng, Y.; Zeng, H.; Wang, L.; Feng, W. Light-driven bimorph soft actuators: Design, fabrication, and properties. Mater. Horiz. 2021, 8, 728–757. [Google Scholar] [CrossRef]
- Wang, Y.; Li, S.; Liu, L.; Feng, S.; Guan, K.; Shi, Y.; Sun, F.; Wang, X.; Shen, Y.; Zhang, C.; et al. Novel two-dimensional conductive metal-organic framework-based heterostructures for high-performance electro-ionic soft actuators. J. Mater. Chem. A 2024, 12, 27549–27557. [Google Scholar] [CrossRef]
- Chen, L.; Liu, F.; Abdiryim, T.; Liu, X. Stimuli-responsive hydrogels as promising platforms for soft actuators. Mater. Today Phys. 2024, 40, 101281. [Google Scholar] [CrossRef]
- Banerjee, H.; Kalairaj, M.S.; Ren, H.; Jusufi, A. Strong, ultrastretchable hydrogel-based multilayered soft actuator composites enhancing biologically inspired pumping systems. Adv. Eng. Mater. 2021, 23, 2100121. [Google Scholar] [CrossRef]
- Liu, J.; Jiang, L.; Liu, A.; He, S.; Shao, W. Ultrafast thermo-responsive bilayer hydrogel actuator assisted by hydrogel microspheres. Sens. Actuators B Chem. 2022, 357, 131434. [Google Scholar] [CrossRef]
- Xu, Z.; Wei, D.W.; Bao, R.Y.; Wang, Y.; Ke, K.; Yang, M.B.; Yang, W. Self-sensing actuators based on a stiffness variable reversible shape memory polymer enabled by a phase change material. ACS Appl. Mater. Interfaces 2022, 14, 22521–22530. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, T.; Lan, X.; Liu, Y.; Leng, J.; Liu, L. A compliant robotic grip structure based on shape memory polymer composite. Compos. Commun. 2022, 36, 101383. [Google Scholar] [CrossRef]
- Peixoto, C.; Zille, A.; Ferreira da Silva, A.; Carneiro, O.S. Shape memory polymers as actuators: Characterization of the relevant parameters under constrained recovery. Polym. Eng. Sci. 2021, 61, 2522–2535. [Google Scholar] [CrossRef]
- Li, K.; Li, Z.; Zhou, L. Electrically driven liquid crystal elastomer self-oscillators via rheostat feedback mechanism. Polymers 2025, 17, 617. [Google Scholar] [CrossRef]
- Kotikian, A.; Morales, J.M.; Lu, A.; Mueller, J.; Davidson, Z.S.; Boley, J.W.; Lewis, J.A. Innervated, self-sensing liquid crystal elastomer actuators with closed loop control. Adv. Mater. 2021, 33, 2101814. [Google Scholar] [CrossRef]
- He, Q.; Wang, Z.; Wang, Y.; Wang, Z.; Li, C.; Annapooranan, R.; Zeng, J.; Chen, R.; Cai, S. Electrospun liquid crystal elastomer microfiber actuator. Sci. Robot. 2021, 6, eabi9704. [Google Scholar] [CrossRef]
- Wang, Y.; Mi, H.; Zheng, Q.; Ma, Z.; Gong, S. Flexible infrared responsive multi-walled carbon nanotube/form-stable phase change material nanocomposites. ACS Appl. Mater. Interfaces 2015, 7, 21602–21609. [Google Scholar] [CrossRef]
- Li, M.; Wang, Y.; Yu, Z.; Fu, Y.; Zheng, J.; Liu, Y.; Cui, J.; Zhou, H.; Li, D. Self-powered infrared-responsive electronic skin employing piezoelectric nanofiber nanocomposites driven by microphase transition. ACS Appl. Mater. Interfaces 2020, 12, 13165–13173. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Wang, Y.; Zhang, Y.; Zhou, H.; Huang, Z.; Li, D. Highly flexible and stretchable MWCNT/HEPCP nanocomposites with integrated near-IR, temperature and stress sensitivity for electronic skin. J. Mater. Chem. C 2018, 6, 5877–5887. [Google Scholar] [CrossRef]
- Bi, H.; Ye, G.; Yang, H.; Sun, H.; Ren, Z.; Guo, R.; Xu, M.; Cai, L.; Huang, Z. Near infrared-induced shape memory polymer composites with dopamine-modified multiwall carbon nanotubes via 3D-printing. Eur. Polym. J. 2020, 136, 109920. [Google Scholar] [CrossRef]
- Chen, Z.; Zhao, D.; Ma, R.; Zhang, X.; Rao, J.; Yin, Y.; Wang, X.; Yi, F. Flexible temperature sensors based on carbon nanomaterials. J. Mater. Chem. B 2021, 9, 1941–1964. [Google Scholar] [CrossRef]
- Maduraiveeran, G.; Jin, W. Carbon nanomaterials: Synthesis, properties and applications in electrochemical sensors and energy conversion systems. Mater. Sci. Eng. B Adv. 2021, 272, 115341. [Google Scholar] [CrossRef]
- Jariwala, D.; Sangwan, V.K.; Lauhon, L.J.; Marks, T.J.; Hersam, M.C. Carbon nanomaterials for electronics, optoelectronics, photovoltaics, and sensing. Chem. Soc. Rev. 2013, 42, 2824–2860. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, G.; Jin, B.; Feng, H.; Chen, Z.; Fang, M.; Yang, B.; Xiao, R.; Xie, T.; Zheng, N. Multimodal autonomous locomotion of liquid crystal elastomer soft robot. Adv. Sci. 2024, 11, 2402358. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Y.Y.; Jiang, Z.C.; Tong, X.; Zhao, Y. Biomimetic locomotion of electrically powered “Janus” soft robots using a liquid crystal polymer. Adv. Mater. 2019, 31, 1903452. [Google Scholar] [CrossRef]
- Zheng, Q.; Wang, Z.; Chen, B.; Liu, G.; Zhao, J. Analysis of XRD spectral structure and carbonization of the biochar preparation. Spectrosc. Spect. Anal. 2016, 36, 3355–3359. [Google Scholar]
- Sakaida, S.; Otsubo, K.; Sakata, O.; Song, C.; Fujiwara, A.; Takata, M.; Kitagawa, H. Crystalline coordination framework endowed with dynamic gate-opening behaviour by being downsized to a thin film. Nat. Chem. 2016, 8, 377–383. [Google Scholar] [CrossRef]
- Huang, Z.; Tsui, G.C.P.; Deng, Y.; Tang, C.Y.; Yang, M.; Zhang, M.; Wong, W.Y. Bioinspired near-infrared light-induced ultrafast soft actuators with tunable deformation and motion based on conjugated polymers/liquid crystal elastomers. J. Mater. Chem. C 2022, 10, 12731–12740. [Google Scholar] [CrossRef]
- Qin, L.; Liu, X.; Yu, Y. Soft actuators of liquid crystal polymers fueled by light from ultraviolet to near infrared. Adv. Opt. Mater. 2021, 9, 2001743. [Google Scholar] [CrossRef]
- Dash, P.; Panda, P.K.; Su, C.; Lin, Y.-C.; Sakthivel, R.; Chen, S.-L.; Chung, R.-J. Near-infrared-driven upconversion nanoparticles with photocatalysts through water-splitting towards cancer treatment. J. Mater. Chem. B 2024, 12, 3881–3907. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Contents | Research Results |
|---|---|
| Performance of MWCNT/LCP Nanocomposites | thickness: 0.5 ± 0.1 mm stretchability: tensile strain can reach 200% (Figure S4a). outstanding flexibility (Figure 2e and Figure S4b) |
| Performance of MWCNT/LCP S-actuators | Manufacturing Process: Various soft actuator models can be easily fabricated without complicated assembly. Performance: By precisely controlling the position and time of NIR irradiation, MWCNT/LCP s-actuators can deform and move like creatures in nature, such as opening a knot, “stretch-restoration” reversible deformation of “V”-shape (30 s per cycle), the “spring” rotating and unfolding, imitating a “caterpillar” walking in a straight line (the average speed is 13 s/mm), and an “insect” crawling and rolling, etc. |
| Mechanism of MWCNT/LCP S-actuators | The macroscopic deformation and motion of MWCNT/LCP s-actuators are attributed to the destruction of rod-shaped mesogenic unit of the LCP at the micro level due to the photothermal effect-regulated liquid crystal–isotropic phase transition in LCP, which makes the movement of the molecular chains more active. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Ma, Y. Biomimetic Soft Actuator with Deformation and Motion Driven by Near-Infrared Light. Polymers 2025, 17, 1315. https://doi.org/10.3390/polym17101315
Li M, Ma Y. Biomimetic Soft Actuator with Deformation and Motion Driven by Near-Infrared Light. Polymers. 2025; 17(10):1315. https://doi.org/10.3390/polym17101315
Chicago/Turabian StyleLi, Mei, and Yubai Ma. 2025. "Biomimetic Soft Actuator with Deformation and Motion Driven by Near-Infrared Light" Polymers 17, no. 10: 1315. https://doi.org/10.3390/polym17101315
APA StyleLi, M., & Ma, Y. (2025). Biomimetic Soft Actuator with Deformation and Motion Driven by Near-Infrared Light. Polymers, 17(10), 1315. https://doi.org/10.3390/polym17101315