
All-Light Remote Driving and Programming of Soft Actuator Based on Selective Laser Stimulation and Modification

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Design and Qualitative Analysis of Programmable Soft Actuator
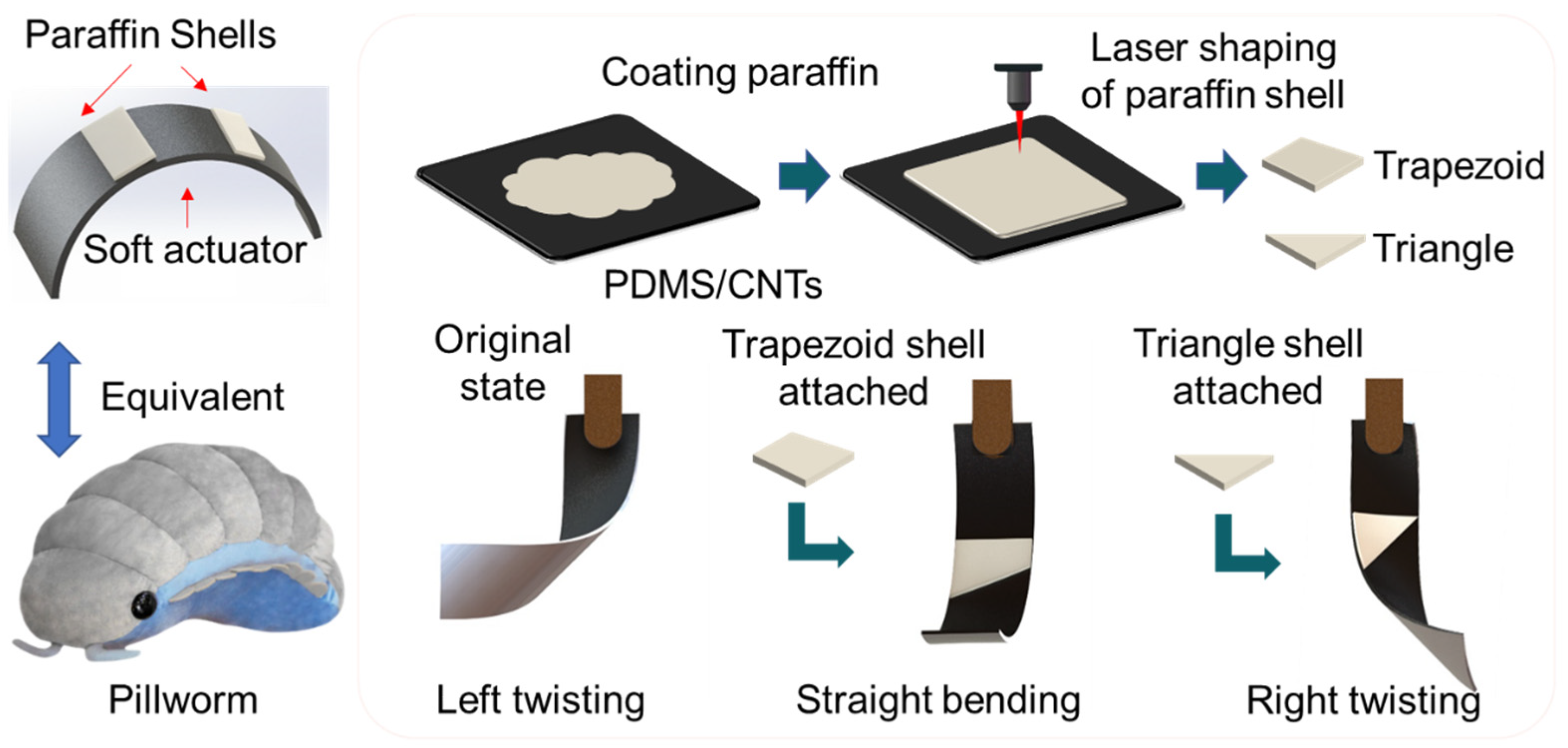
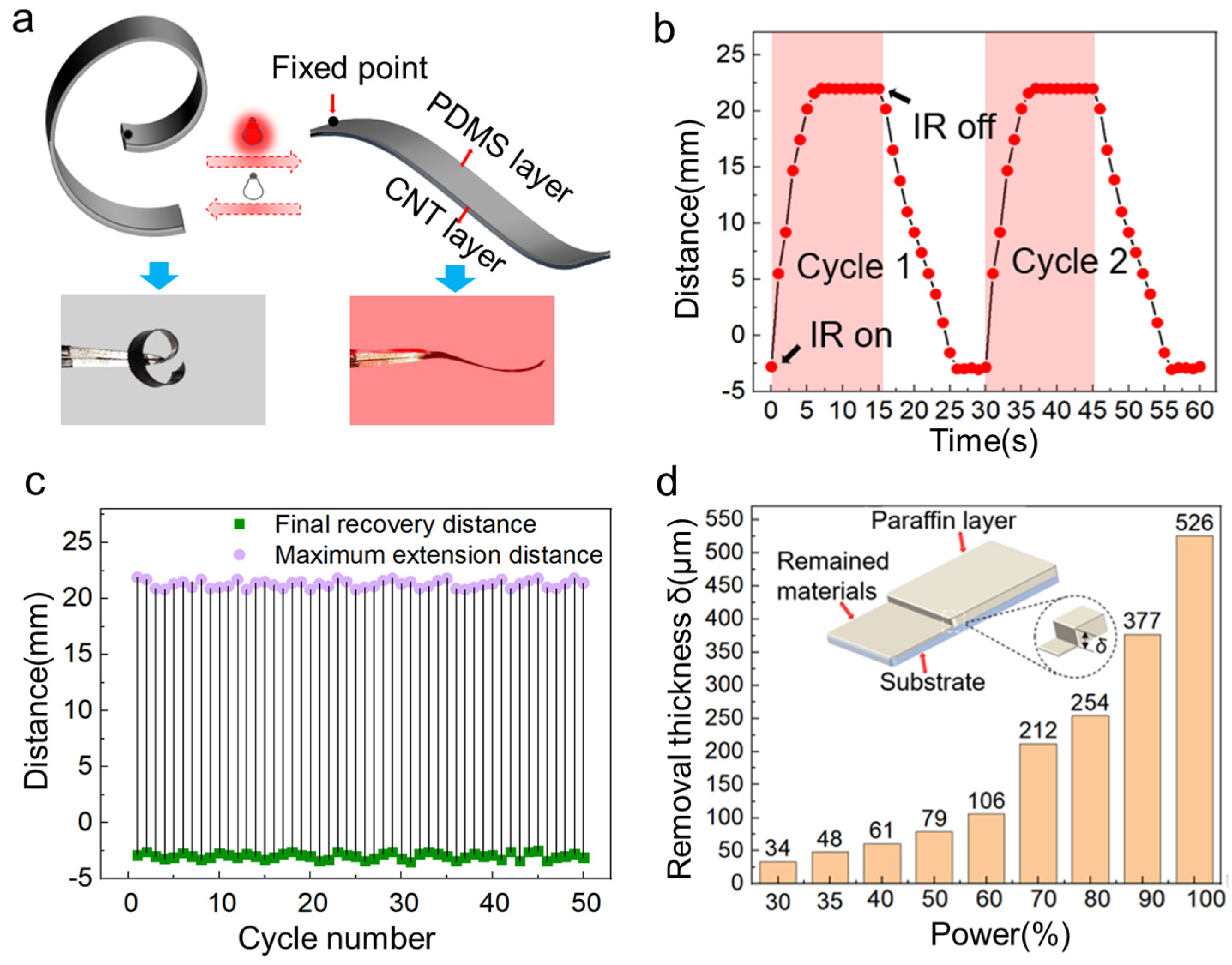
2.1. The Design Process and Driving Mechanism for Actuators
2.2. Effect of Different Widths of PW Layers on the Bending Performance of the Actuators
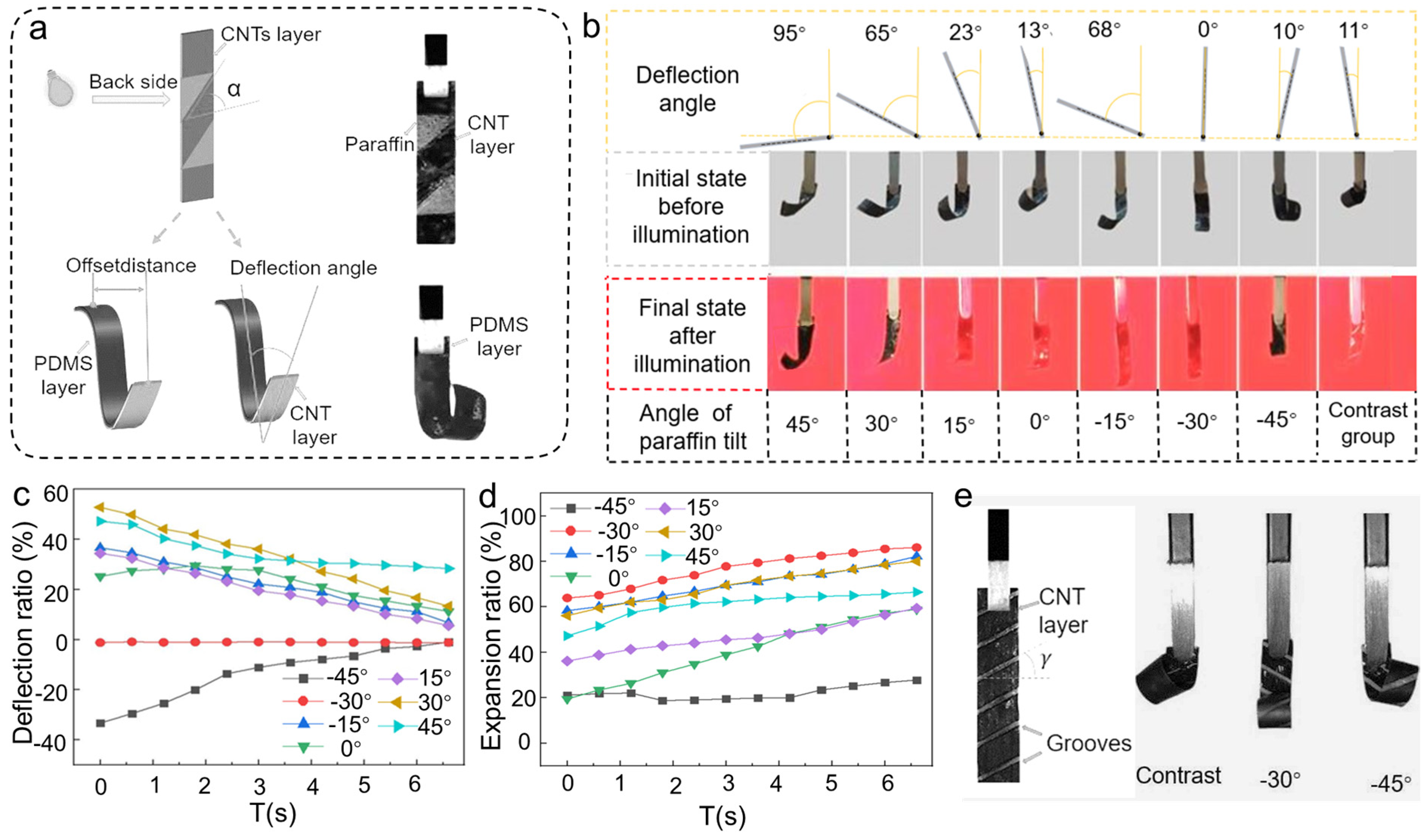
2.3. Influence of Different Tilt Angle PW Structures on Actuator Direction Change
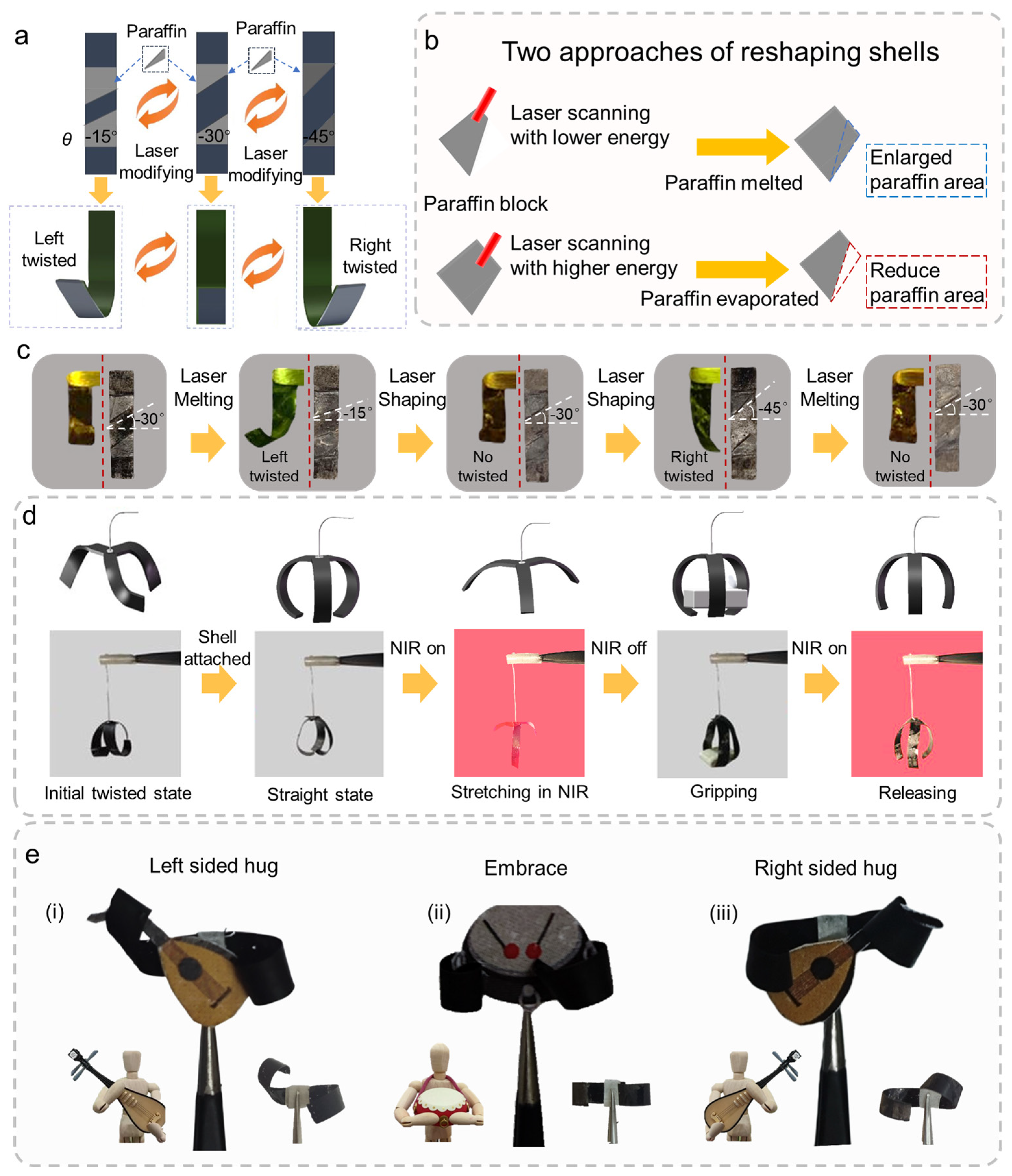
2.4. Reprogrammable Design of the Actuator
3. Application of Programmable Soft Actuators
4. Conclusions
5. Methods
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PW | paraffin wax |
| PDMS | polydimethylsiloxane |
| CNTs | carbon nanotubes |
| NIR | near infrared |
References
- Chellattoan, R.; Yudhanto, A.; Lubineau, G. Low-Voltage-Driven Large-Amplitude Soft Actuators Based on Phase Transition. Soft Rob. 2020, 7, 688–699. [Google Scholar] [CrossRef] [PubMed]
- Jiang, D.; Fan, Z.; Wang, H.; Xu, M.; Chen, G.; Song, Y.; Wang, Z.L. Triboelectric Nanogenerator Powered Electrowetting-on-Dielectric Actuator for Concealed Aquatic Microbots. ACS Nano 2020, 14, 15394–15402. [Google Scholar] [CrossRef]
- Zhang, Y.-L.; Li, J.-C.; Zhou, H.; Liu, Y.-Q.; Han, D.-D.; Sun, H.-B. Electro-responsive actuators based on graphene. Innovation 2021, 2, 100168. [Google Scholar] [CrossRef]
- Li, Z.; Myung, N.V.; Yin, Y. Light-powered soft steam engines for self-adaptive oscillation and biomimetic swimming. Sci. Rob. 2021, 6, eabi4523. [Google Scholar] [CrossRef] [PubMed]
- Pan, X.; Grossiord, N.; Sol, J.A.; Debije, M.G.; Schenning, A.P. 3D Anisotropic Polyethylene as Light-Responsive Grippers and Surfing Divers. Adv. Funct. Mater. 2021, 31, 2100465. [Google Scholar] [CrossRef]
- Deng, H.; Sattari, K.; Xie, Y.; Liao, P.; Yan, Z.; Lin, J. Laser reprogramming magnetic anisotropy in soft composites for reconfigurable 3D shaping. Nat. Commun. 2020, 11, 6325. [Google Scholar] [CrossRef]
- Zhang, Y.; Liao, J.; Wang, T.; Sun, W.; Tong, Z. Polyampholyte Hydrogels with pH Modulated Shape Memory and Spontaneous Actuation. Adv. Funct. Mater. 2018, 28, 1707245. [Google Scholar] [CrossRef]
- Wang, M.; Zhou, L.; Deng, W.; Hou, Y.; He, W.; Yu, L.; Sun, H.; Ren, L.; Hou, X. Ultrafast response and programmable locomotion of liquid/vapor/light-driven soft multifunctional actuators. ACS Nano 2022, 16, 2672–2681. [Google Scholar] [CrossRef] [PubMed]
- Jiang, F.; Zhang, Z.; Wang, X.; Cheng, G.; Zhang, Z.; Ding, J. Pneumatically Actuated Self-Healing Bionic Crawling Soft Robot. J. Intell. Robot. Syst. 2020, 100, 445–454. [Google Scholar] [CrossRef]
- Li, X.; Duan, H.; Lv, P.; Yi, X. Soft actuators based on liquid-vapor phase change composites. Soft Rob. 2021, 8, 251–261. [Google Scholar] [CrossRef]
- Yu, M.; Yang, W.; Yu, Y.; Cheng, X.; Jiao, Z. A Crawling Soft Robot Driven by Pneumatic Foldable Actuators Based on Miura-Ori. Actuators 2020, 9, 26. [Google Scholar] [CrossRef]
- Li, M.; Li, C.; Blackman, B.R.; Eduardo, S. Mimicking nature to control bio-material surface wetting and adhesion. Int. Mater. Rev. 2022, 67, 658–681. [Google Scholar] [CrossRef]
- Zhang, Y.L.; Liu, Y.Q.; Han, D.D.; Ma, J.N.; Wang, D.; Li, X.B.; Sun, H.B. Quantum-Confined-Superfluidics-Enabled Moisture Actuation Based on Unilaterally Structured Graphene Oxide Papers. Adv. Mater. 2019, 31, 1901585. [Google Scholar] [CrossRef] [PubMed]
- Qin, L.; Liang, X.; Huang, H.; Chui, C.K.; Yeow, R.C.-H.; Zhu, J. A Versatile Soft Crawling Robot with Rapid Locomotion. Soft Rob. 2019, 6, 455–467. [Google Scholar] [CrossRef]
- Shen, D.; Zhang, Q.; Wang, C.; Wang, X.; Tian, M. Design and analysis of a snake-inspired crawling robot driven by alterable angle scales. IEEE Rob. Autom. Lett. 2021, 6, 3744–3751. [Google Scholar] [CrossRef]
- Umedachi, T.; Shimizu, M.; Kawahara, Y. Caterpillar-inspired crawling robot using both compression and bending deformations. IEEE Rob. Autom. Lett. 2019, 4, 670–676. [Google Scholar] [CrossRef]
- Li, W.-B.; Zhang, W.-M.; Gao, Q.-H.; Guo, Q.; Wu, S.; Zou, H.-X.; Peng, Z.-K.; Meng, G. Electrically Activated Soft Robots: Speed Up by Rolling. Soft Rob. 2021, 8, 611–624. [Google Scholar] [CrossRef]
- Chen, R.; Yuan, Z.; Guo, J.; Bai, L.; Zhu, X.; Liu, F.; Pu, H.; Xin, L.; Peng, Y.; Luo, J. Legless soft robots capable of rapid, continuous, and steered jumping. Nat. Commun. 2021, 12, 7028. [Google Scholar] [CrossRef]
- Hu, Y.; Liu, J.; Chang, L.; Yang, L.; Xu, A.; Qi, K.; Lu, P.; Wu, G.; Chen, W.; Wu, Y. Electrically and Sunlight-Driven Actuator with Versatile Biomimetic Motions Based on Rolled Carbon Nanotube Bilayer Composite. Adv. Funct. Mater. 2017, 27, 1704388. [Google Scholar] [CrossRef]
- Justus, K.B.; Hellebrekers, T.; Lewis, D.D.; Wood, A.; Ingham, C.; Majidi, C.; LeDuc, P.R.; Tan, C. A biosensing soft robot: Autonomous parsing of chemical signals through integrated organic and inorganic interfaces. Sci. Rob. 2019, 4, eaax0765. [Google Scholar] [CrossRef]
- Li, P.; Wang, Y.; Gupta, U.; Liu, J.; Zhang, L.; Du, D.; Foo, C.C.; Ouyang, J.; Zhu, J. Transparent Soft Robots for Effective Camouflage. Adv. Funct. Mater. 2019, 29, 1901908. [Google Scholar] [CrossRef]
- Lee, G.; Kong, M.; Park, D.; Park, J.; Jeong, U. Electro-Photoluminescence Color Change for Deformable Visual Encryption. Adv. Mater. 2020, 32, 1907477. [Google Scholar] [CrossRef] [PubMed]
- Rafsanjani, A.; Zhang, Y.; Liu, B.; Rubinstein, S.M.; Bertoldi, K. Kirigami skins make a simple soft actuator crawl. Sci. Rob. 2018, 3, eaar7555. [Google Scholar] [CrossRef] [PubMed]
- Rogóż, M.; Dradrach, K.; Xuan, C.; Wasylczyk, P. A Millimeter-Scale Snail Robot Based on a Light-Powered Liquid Crystal Elastomer Continuous Actuator. Macromol. Rapid Commun. 2019, 40, 1900279. [Google Scholar] [CrossRef]
- Rozen-Levy, S.; Messner, W.; Trimmer, B.A. The design and de-velopment of branch bot: A branch-crawling, caterpillar-inspired, soft robot. Int. J. Robot. Res. 2021, 40, 24–36. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, K.; Song, Y.; Han, J.; Yue, Y.; Biswas, S.K.; Wu, Q.; Xiao, H. A Skin-Inspired Stretchable, Self-Healing and Electro-Conductive Hydrogel with a Synergistic Triple Network for Wearable Strain Sensors Applied in Human-Motion Detection. Nanomaterials 2019, 9, 1737. [Google Scholar] [CrossRef]
- Lee, D.H.; Yang, J.C.; Sim, J.Y.; Kang, H.; Kim, H.-R.; Park, S. Bending Sensor Based on Controlled Microcracking Regions for Application toward Wearable Electronics and Robotics. ACS Appl. Mater. Interfaces 2022, 14, 31312–31320. [Google Scholar] [CrossRef]
- Pang, J.; Wang, L.; Xu, Y.; Wu, M.; Wang, M.; Liu, Y.; Yu, S.; Li, L. Skin-inspired cellulose conductive hydrogels with integrated self-healing, strain, and thermal sensitive performance. Carbohydr. Polym. 2020, 240, 116360. [Google Scholar] [CrossRef]
- Wang, C.; Zhu, M.; Yu, H.-Y.; Abdalkarim, S.Y.H.; Ouyang, Z.; Zhu, J.; Yao, J. Multifunctional biosensors made with self-healable silk fibroin imitating skin. ACS Appl. Mater. Interfaces 2021, 13, 33371–33382. [Google Scholar] [CrossRef]
- Yang, R.; Jin, M.; Jin, M.; Qian, H.; Gao, Q.; Jin, G.; Zhang, S. Reprogrammable untethered actuator for soft bio-inspired robots. Adv. Intell. Syst. 2021, 3, 2000146. [Google Scholar] [CrossRef]
- Zhang, X.; Tian, M.; Raza, T.; Zhao, H.; Wang, J.; Du, X.; Zhang, X.; Qu, L. Soft robotic reinforced by carbon fiber skeleton with large deformation and enhanced blocking forces. Compos. Part B 2021, 223, 109099. [Google Scholar] [CrossRef]
- Wang, S.; Gao, Y.; Wei, A.; Xiao, P.; Liang, Y.; Lu, W.; Chen, C.; Zhang, C.; Yang, G.; Yao, H. Asymmetric elastoplasticity of stacked graphene assembly actualizes programmable untethered soft robotics. Nat. Commun. 2020, 11, 4359. [Google Scholar] [CrossRef] [PubMed]
- Pilz da Cunha, M.; Ambergen, S.; Debije, M.G.; Homburg, E.F.; den Toonder, J.M.; Schenning, A.P. A Soft Transporter Robot Fueled by Light. Adv. Sci. 2020, 7, 1902842. [Google Scholar] [CrossRef]
- Wu, B.; Xue, Y.; Ali, I.; Lu, H.; Yang, Y.; Yang, X.; Lu, W.; Zheng, Y.; Chen, T. The Dynamic Mortise-and-Tenon Interlock Assists Hydrated Soft Robots Toward Off-Road Locomotion. Research 2022, 2022, 0015. [Google Scholar] [CrossRef] [PubMed]
- Xue, P.; Bisoyi, H.K.; Chen, Y.; Zeng, H.; Yang, J.; Yang, X.; Lv, P.; Zhang, X.; Priimagi, A.; Wang, L. Near-infrared light-driven shape-morphing of programmable anisotropic hydrogels enabled by MXene nanosheets. Angew. Chem. Int. Ed. 2021, 60, 3390–3396. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Dong, J. Programmable soft electrothermal actuators based on free-form printing of the embedded heater. Soft Matter 2021, 17, 2577–2586. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, H.; Chen, R.; Zhao, L.; Wu, H.; Wang, C.; Hu, Y. A Bioinspired Programmable Soft Bilayer Actuator Based on Aluminum Exoskeleton. Adv. Mater. Technol. 2022, 7, 2200036. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Hu, H.; Liang, W.; Fuyang, Z.; Zhang, C.; Pan, D. All-Light Remote Driving and Programming of Soft Actuator Based on Selective Laser Stimulation and Modification. Polymers 2025, 17, 1302. https://doi.org/10.3390/polym17101302
Zhang J, Hu H, Liang W, Fuyang Z, Zhang C, Pan D. All-Light Remote Driving and Programming of Soft Actuator Based on Selective Laser Stimulation and Modification. Polymers. 2025; 17(10):1302. https://doi.org/10.3390/polym17101302
Chicago/Turabian StyleZhang, Jingjing, Hai Hu, Wenliang Liang, Zhijuan Fuyang, Chenchu Zhang, and Deng Pan. 2025. "All-Light Remote Driving and Programming of Soft Actuator Based on Selective Laser Stimulation and Modification" Polymers 17, no. 10: 1302. https://doi.org/10.3390/polym17101302
APA StyleZhang, J., Hu, H., Liang, W., Fuyang, Z., Zhang, C., & Pan, D. (2025). All-Light Remote Driving and Programming of Soft Actuator Based on Selective Laser Stimulation and Modification. Polymers, 17(10), 1302. https://doi.org/10.3390/polym17101302