
A Thermo-Mechanically Robust Compliant Electrode Based on Surface Modification of Twisted and Coiled Nylon-6 Fiber for Artificial Muscle with Highly Durable Contractile Stroke


Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
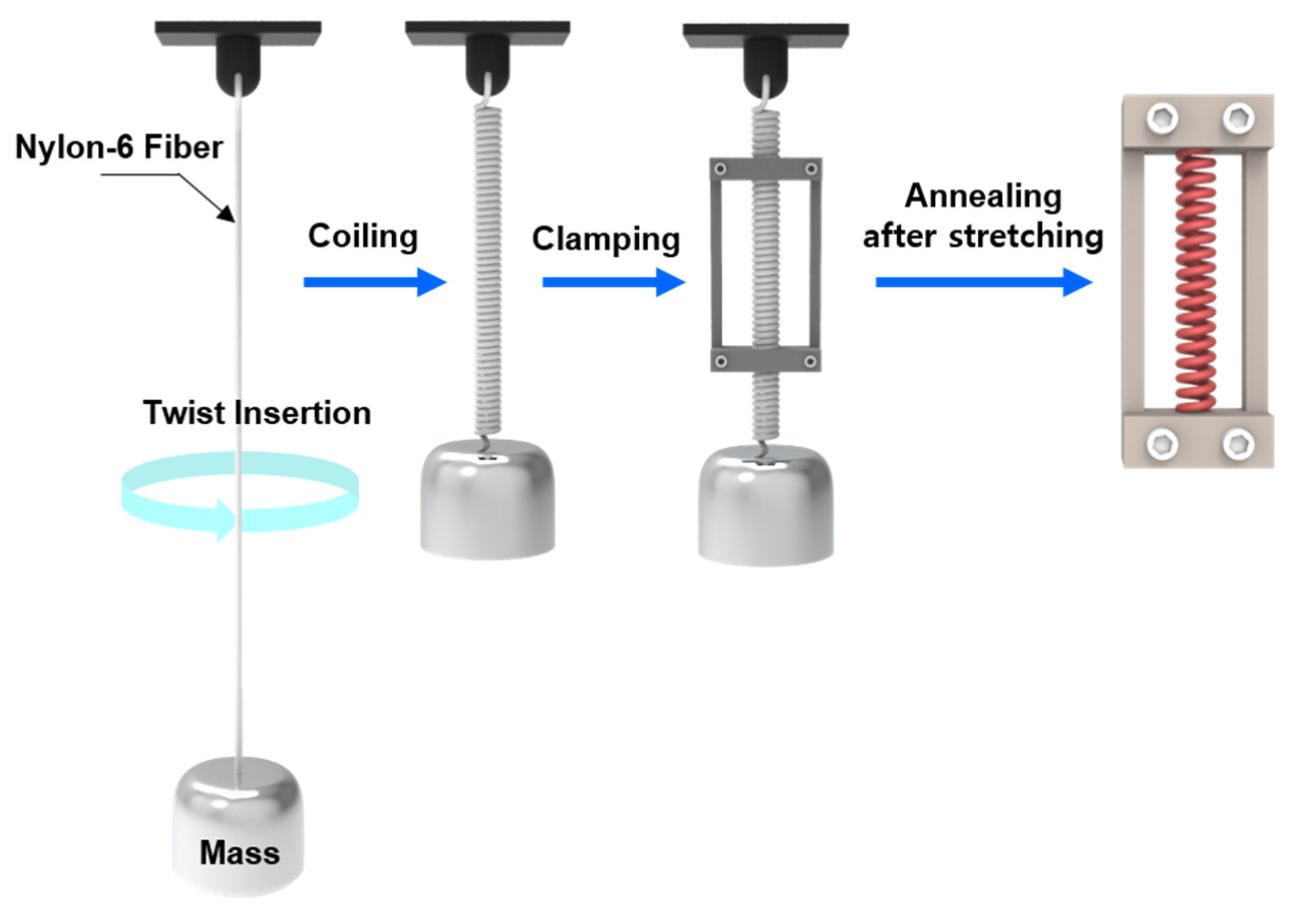
2.2. Fabrication of a Twisted and Coiled Nylon-6 Structure
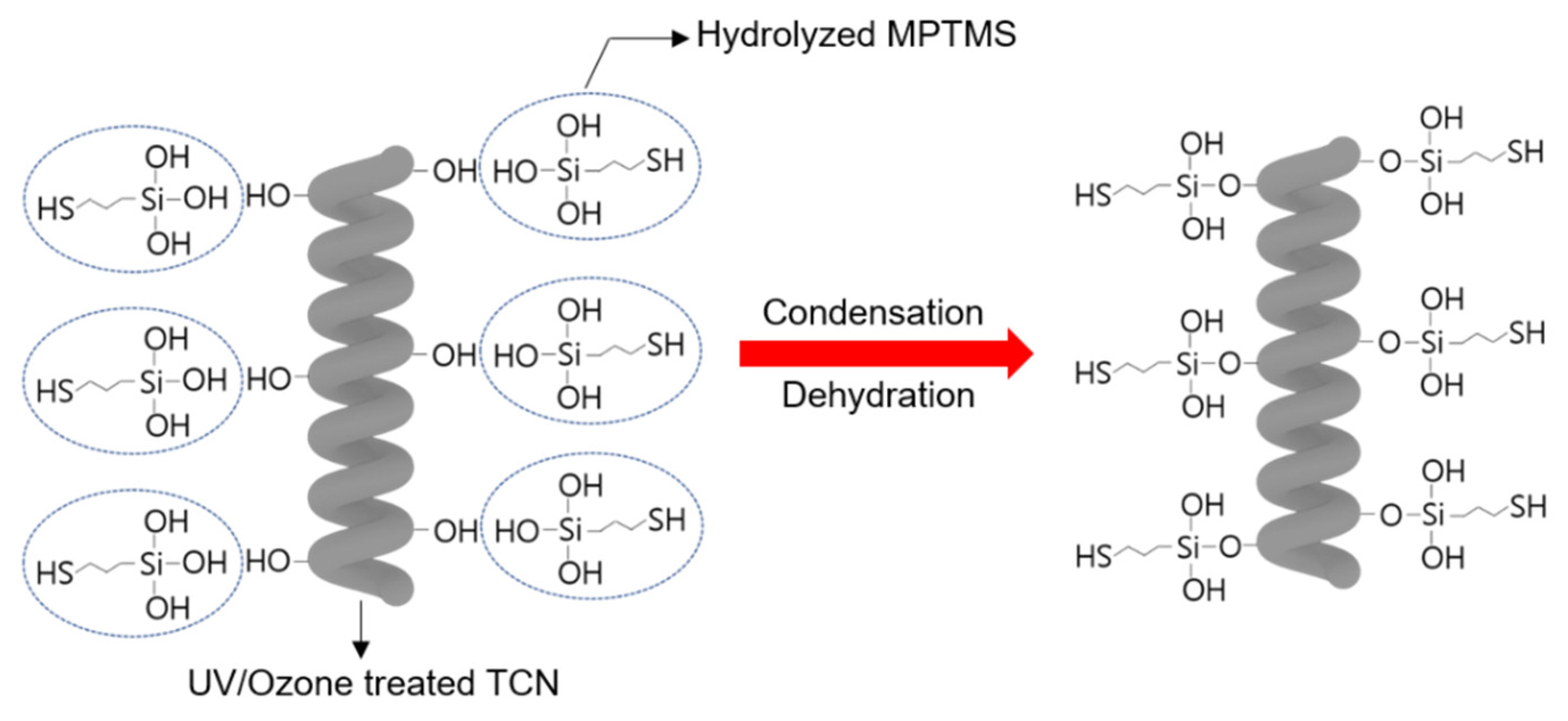
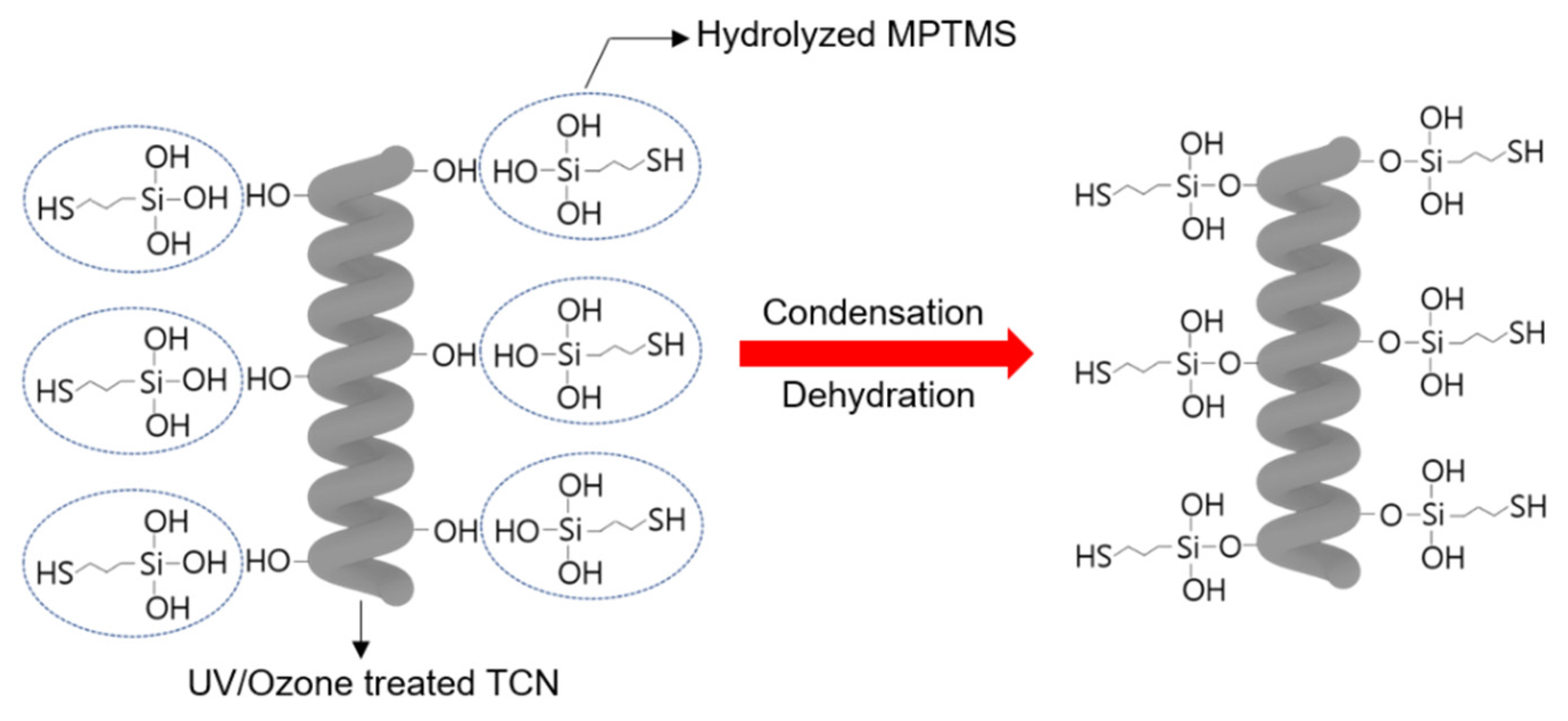
2.3. Surface Modification of the TCN
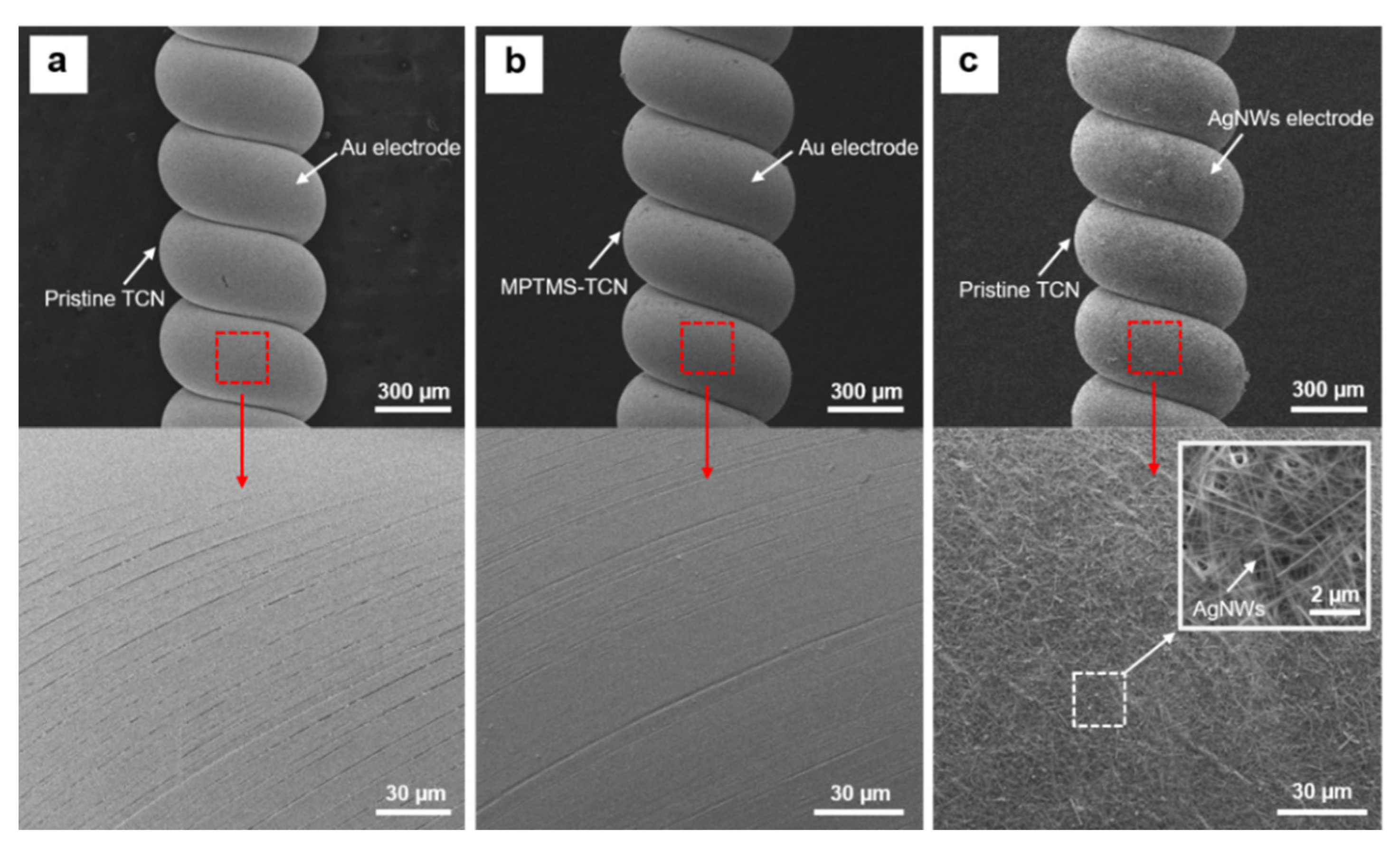
2.4. Construction of Metallic Electrode on the TCN
2.5. Characterization
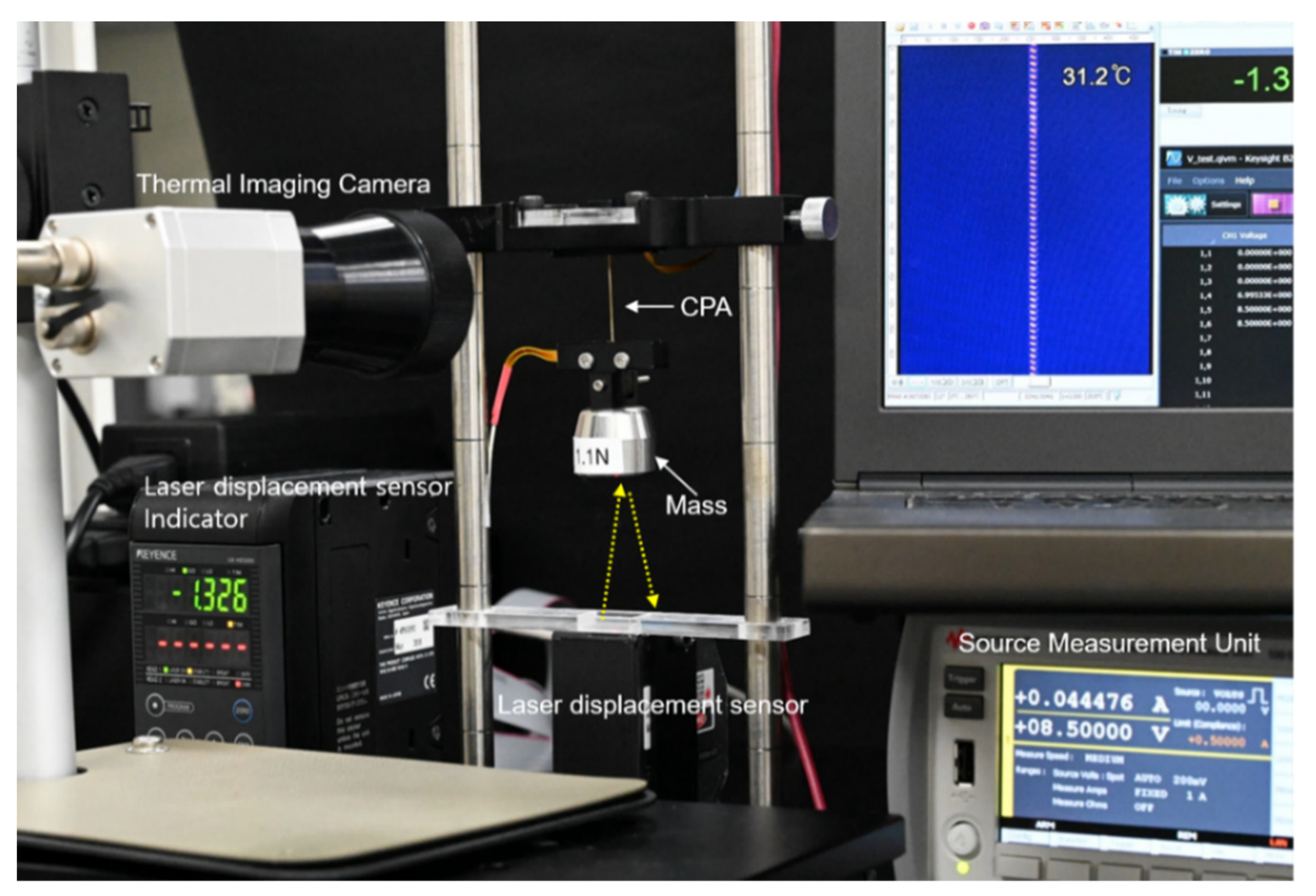
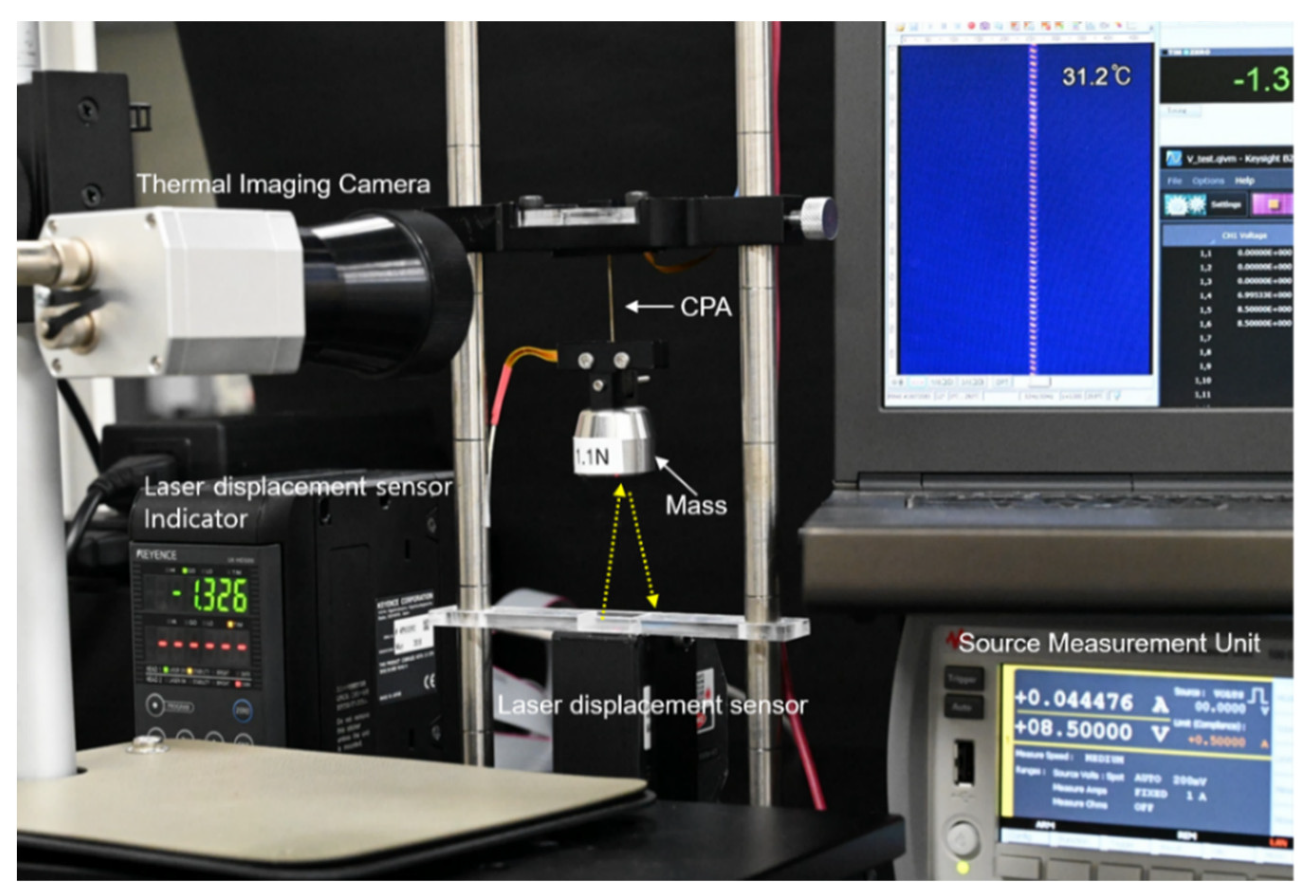
2.6. Performance Test
3. Results and Discussion
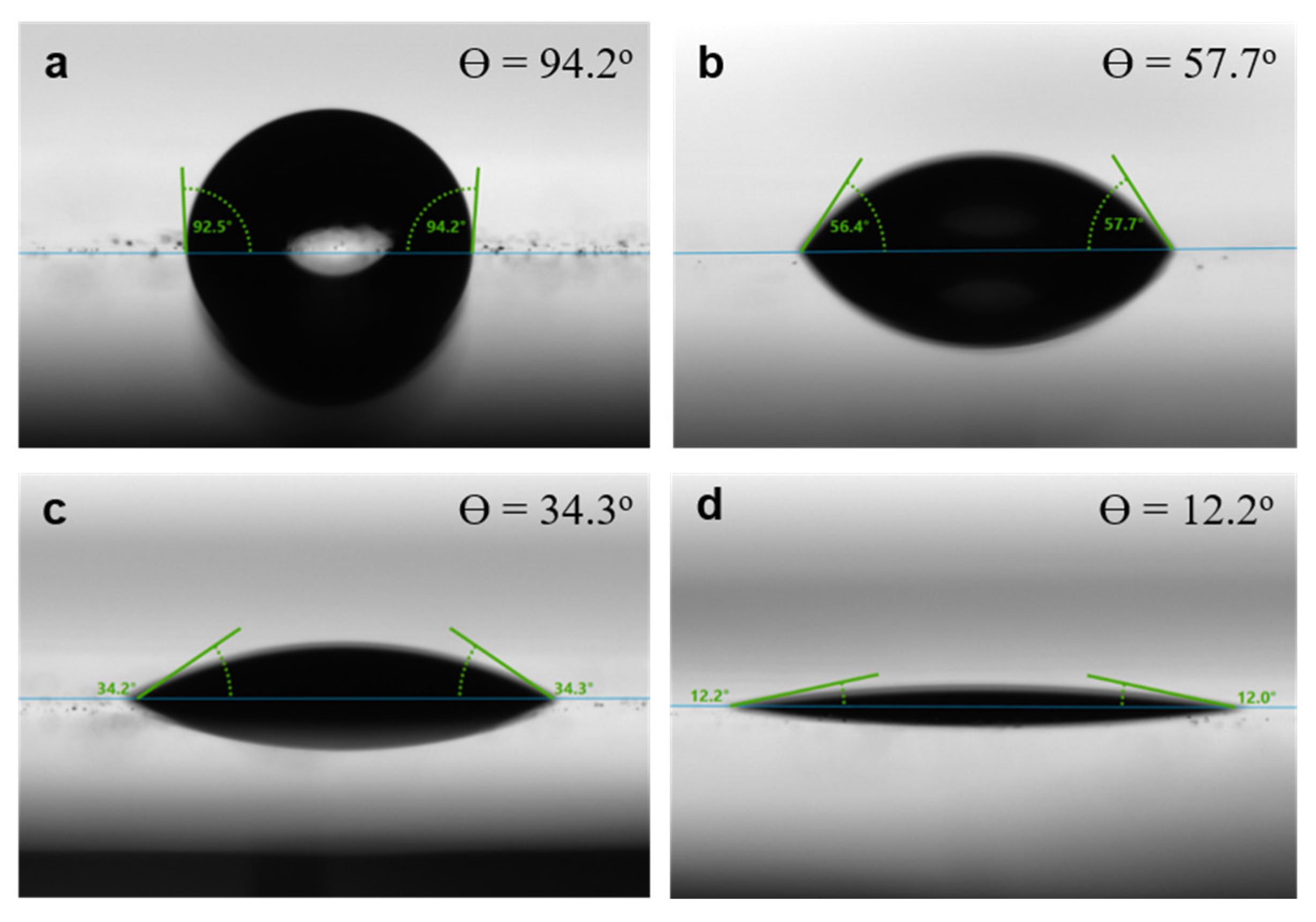
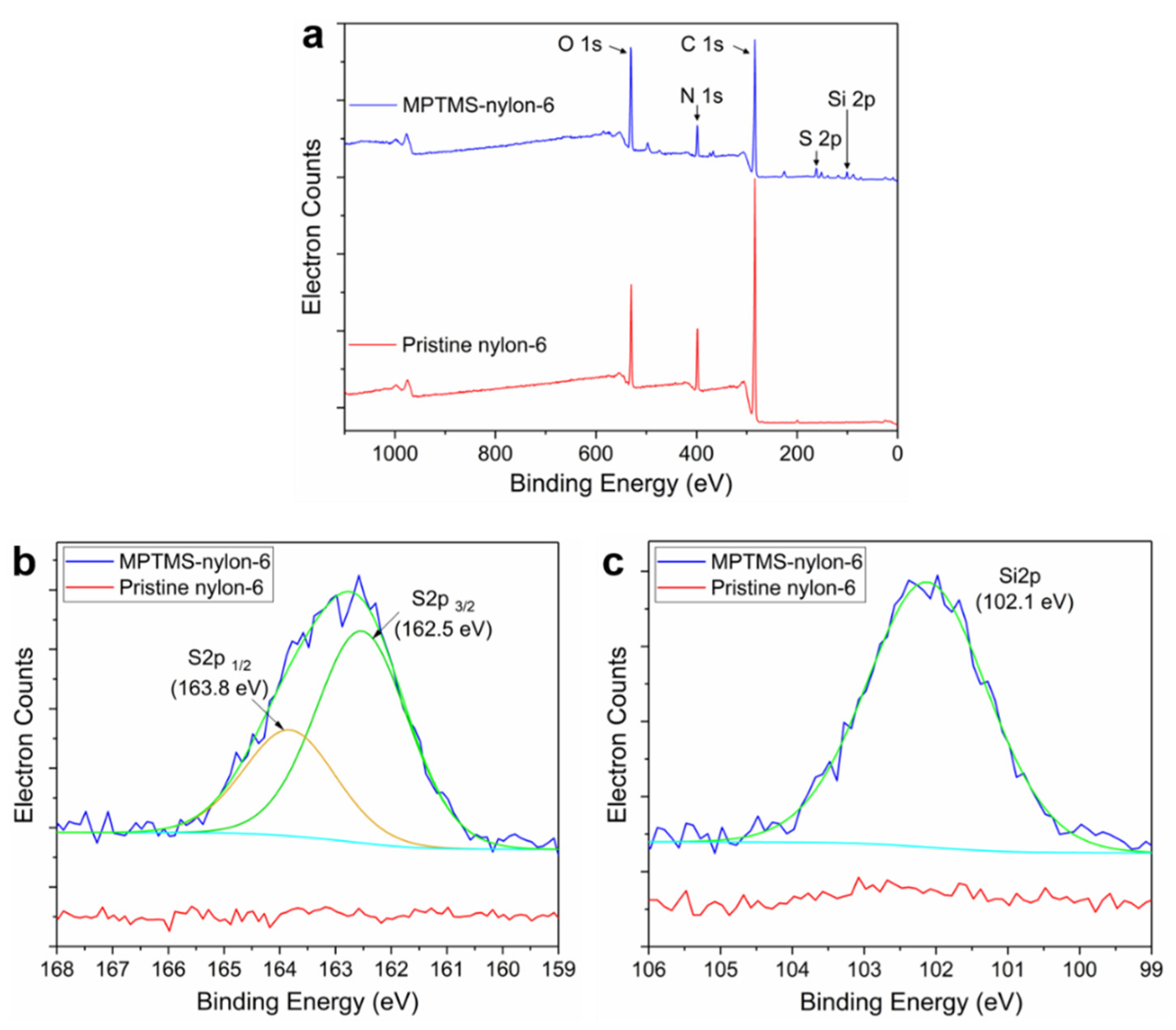
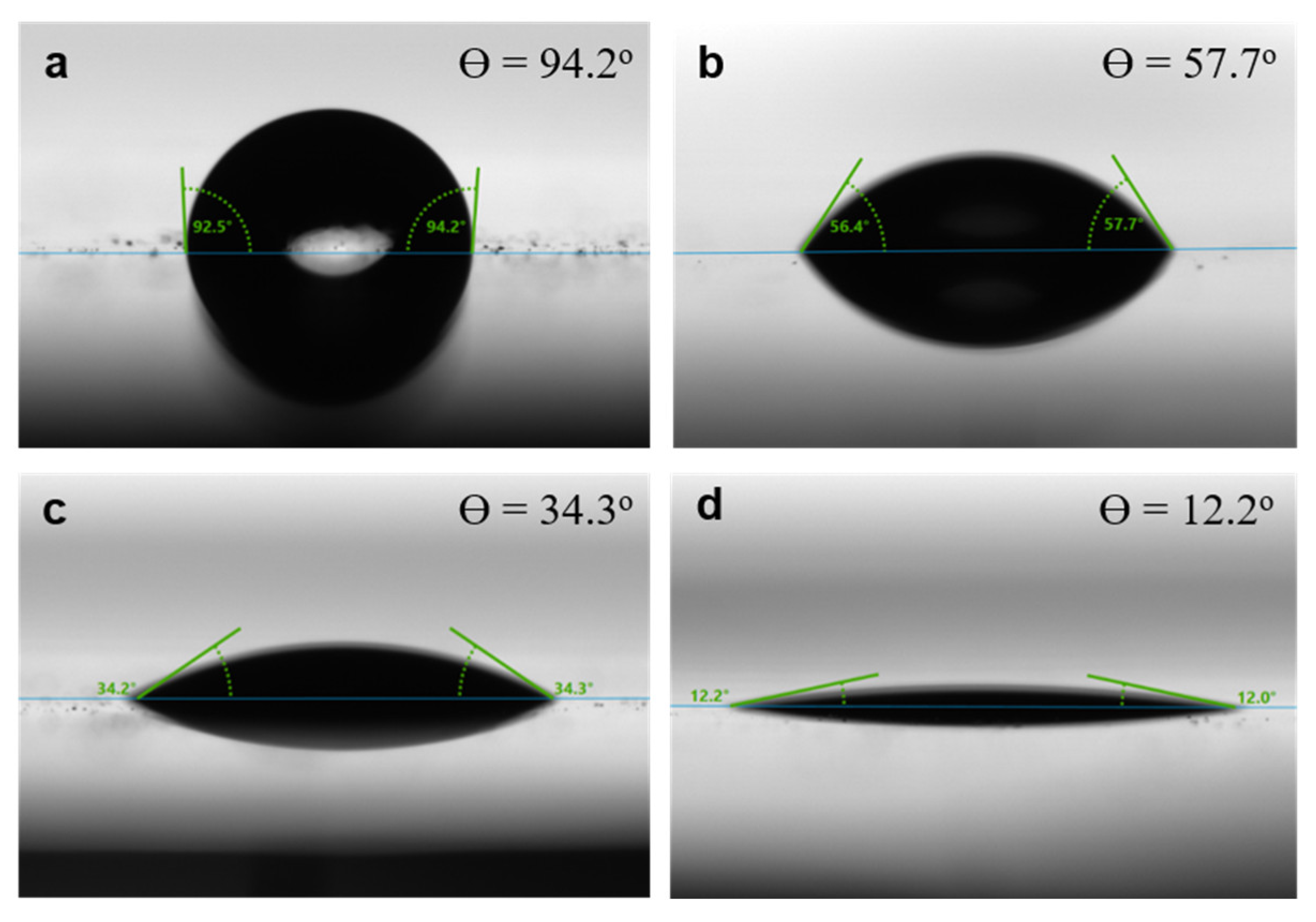
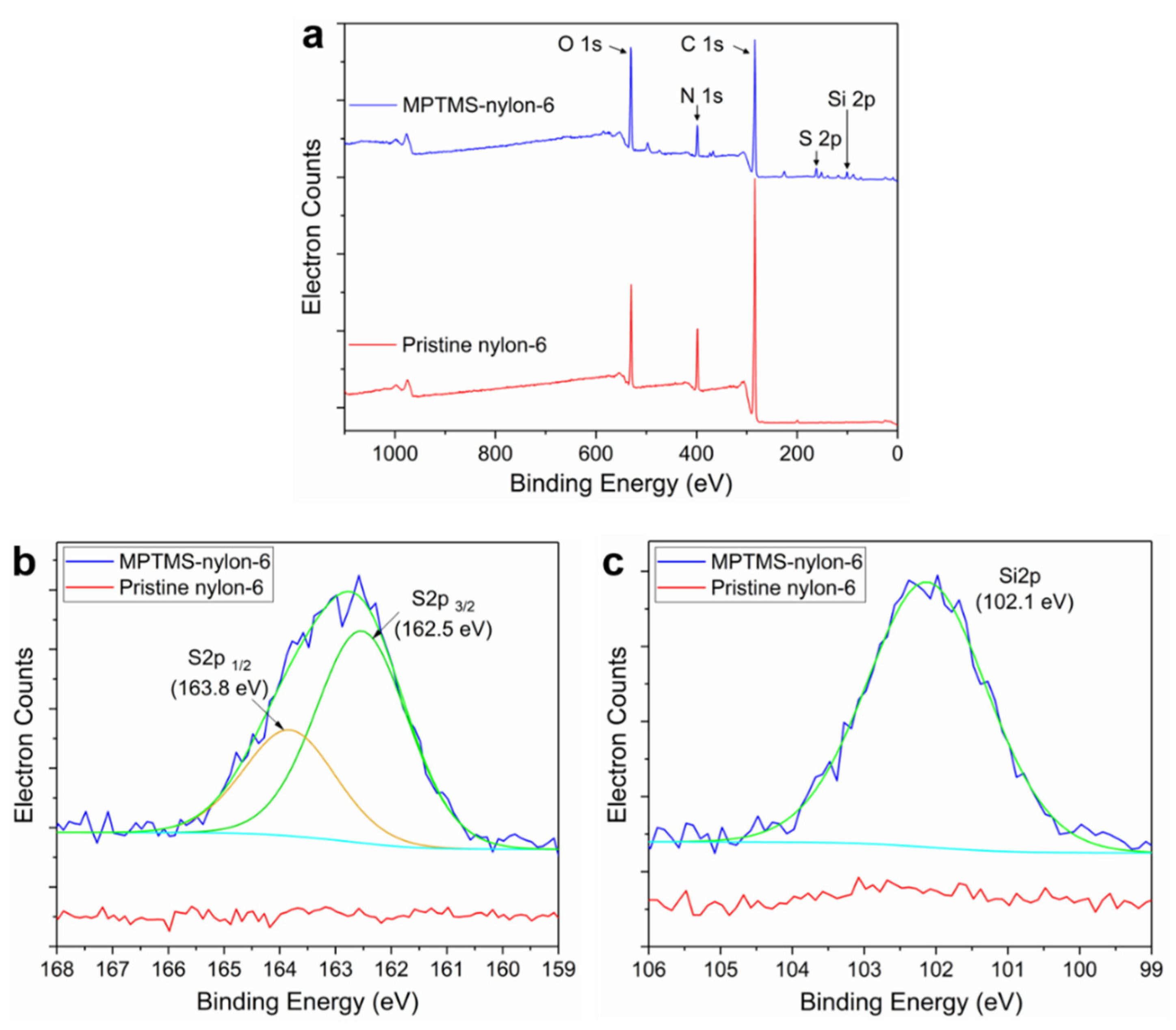
3.1. Surface Modification of TCN
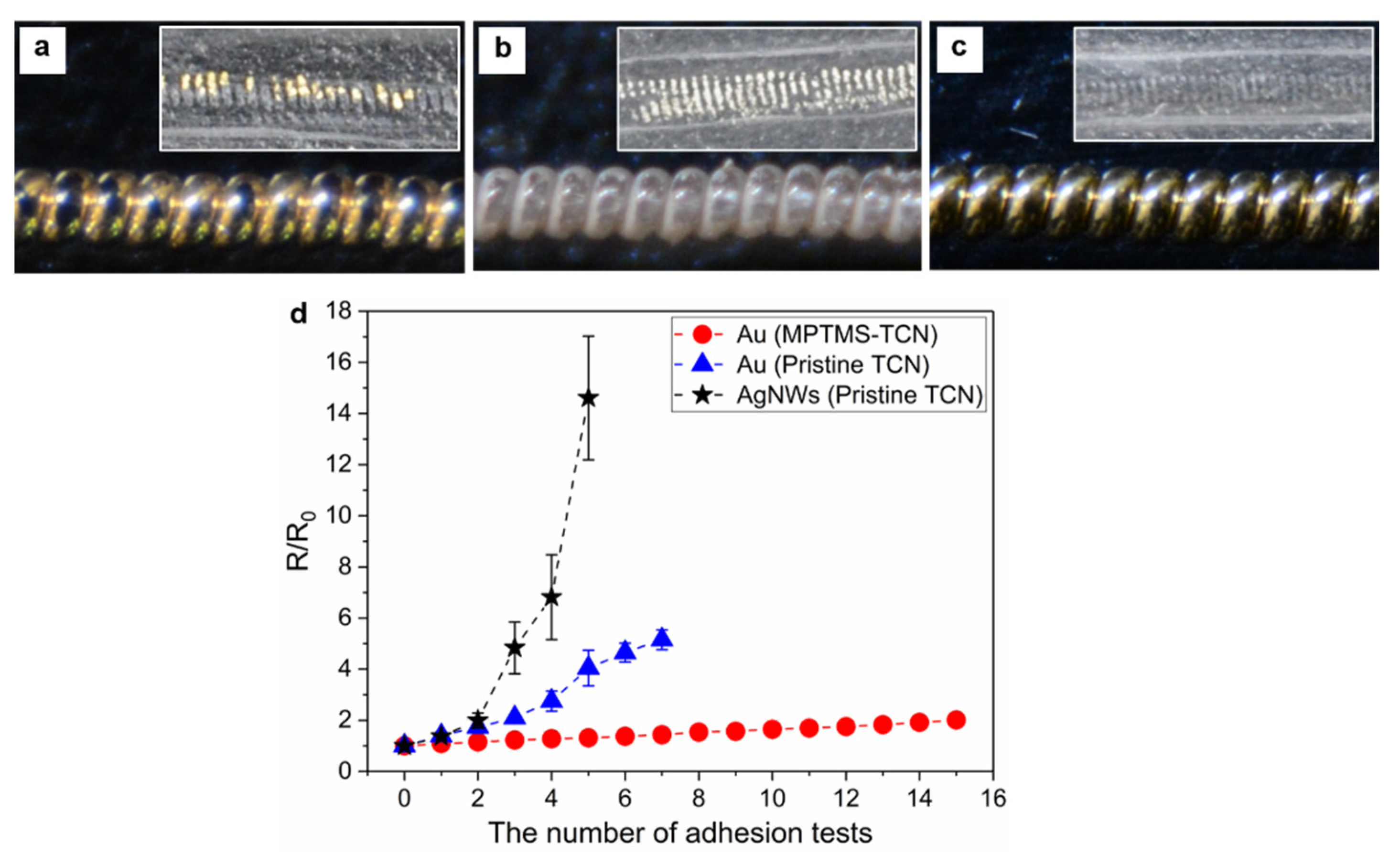
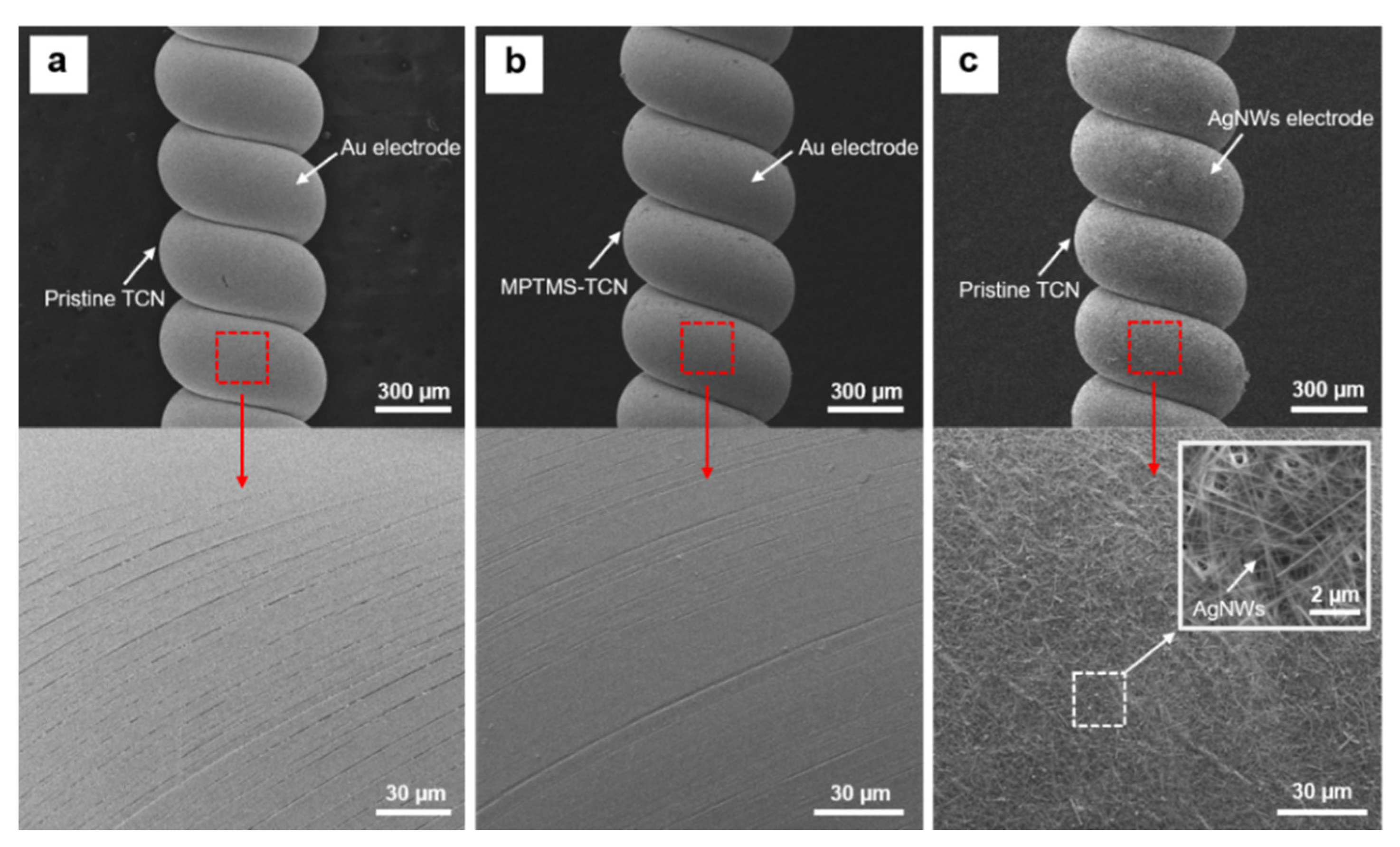
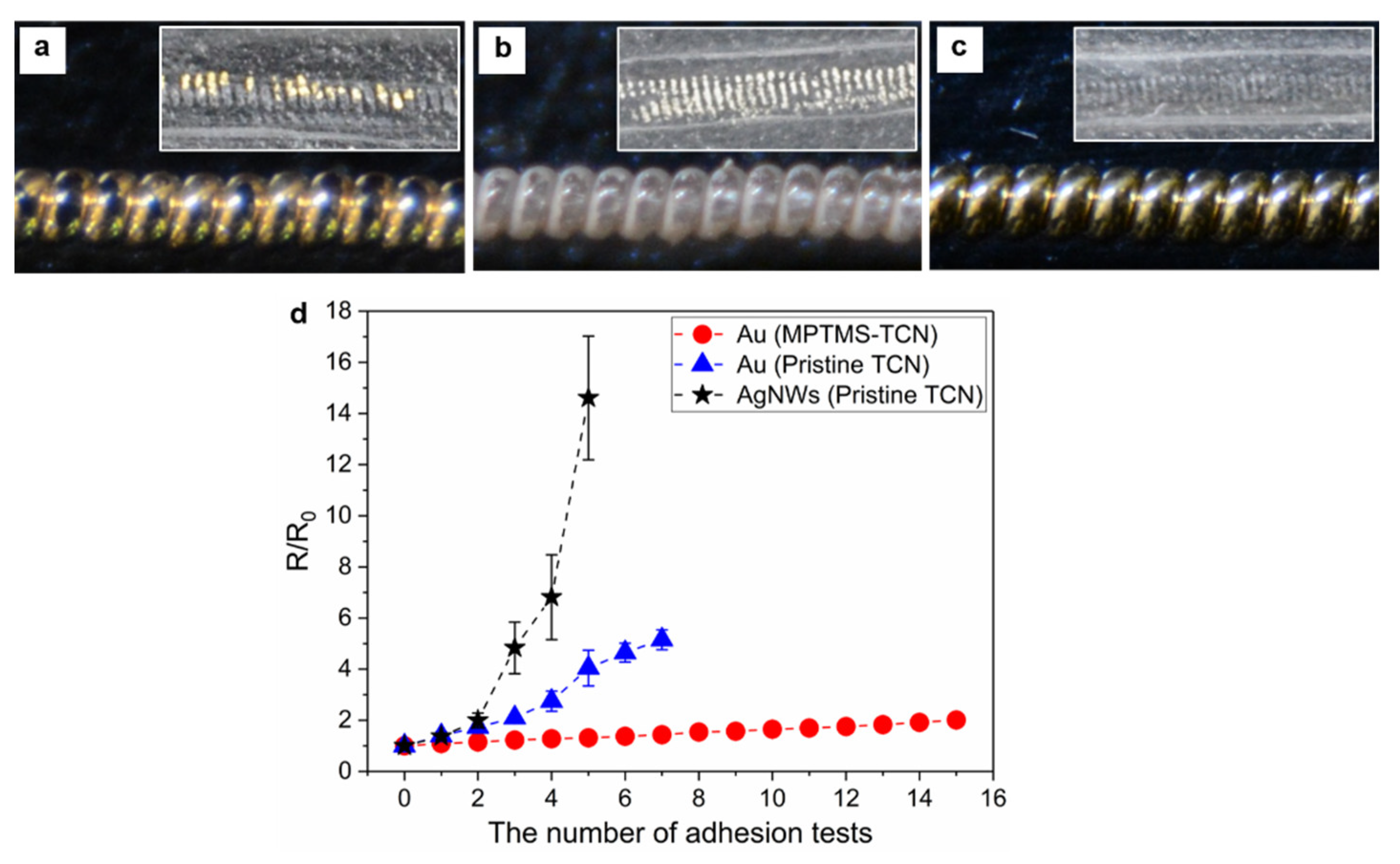
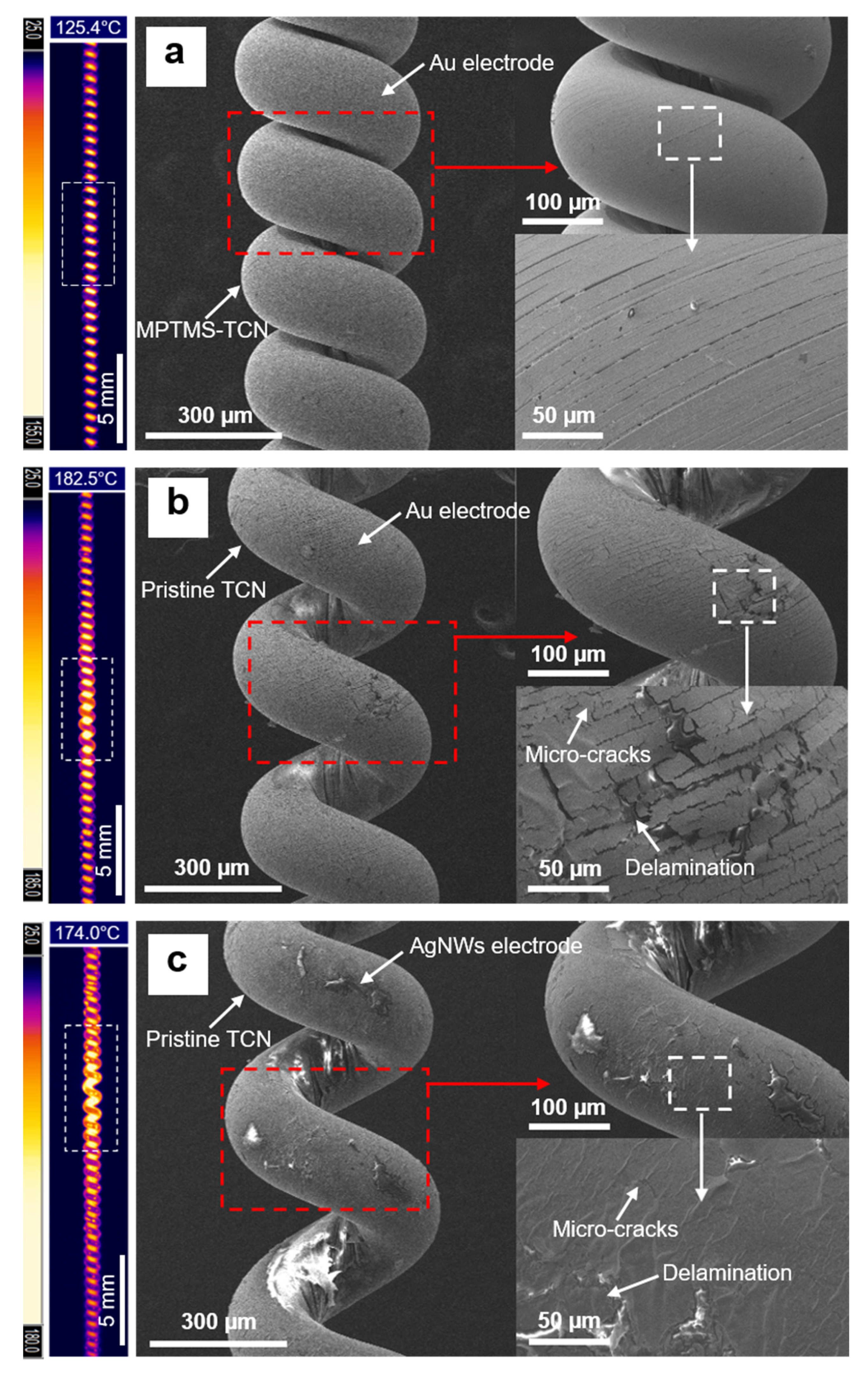
3.2. Mechanical Robustness of Metallic Electrode on the TCN
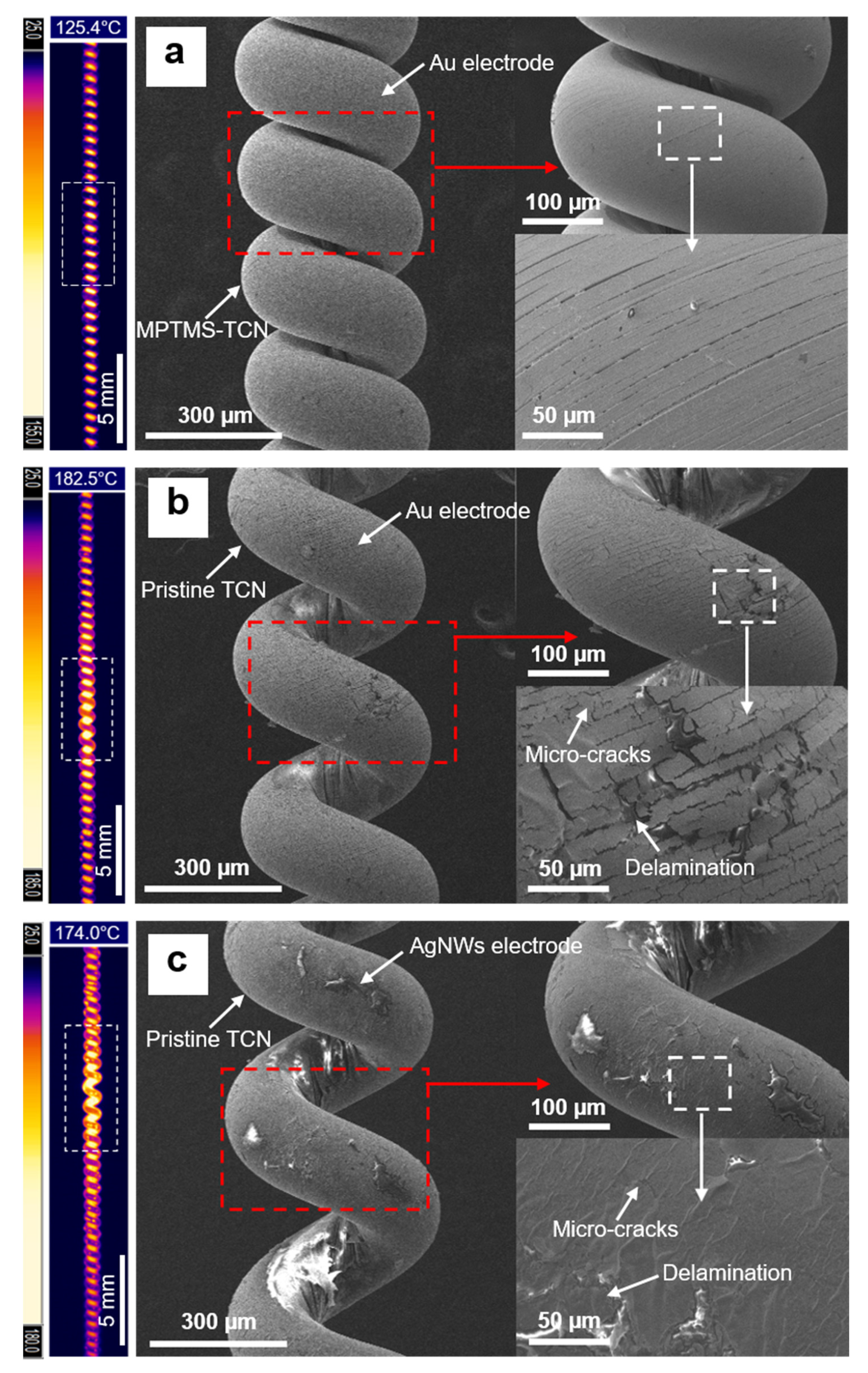
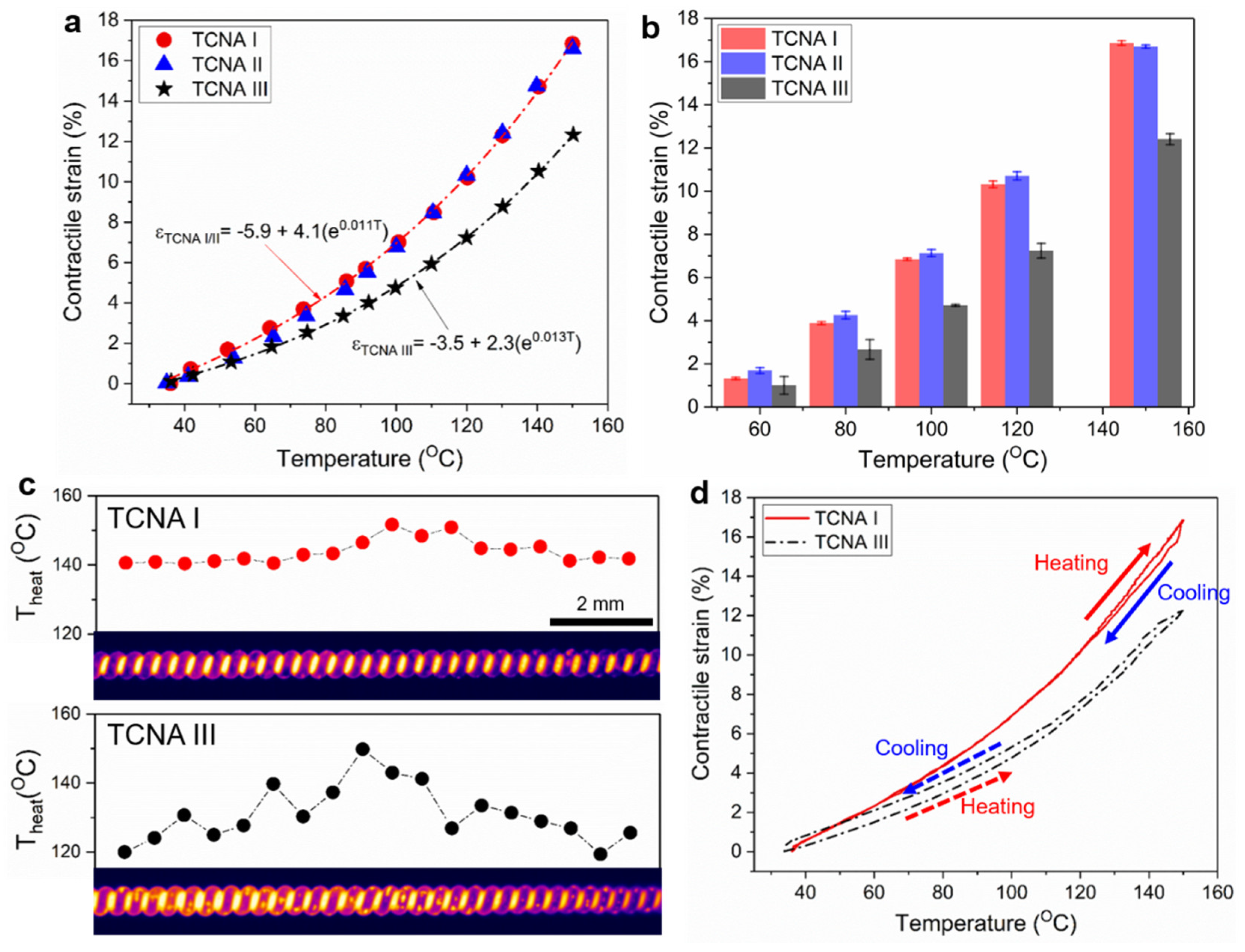
3.3. Electro-Thermally-Induced Deformation Behavior of the TCNAs
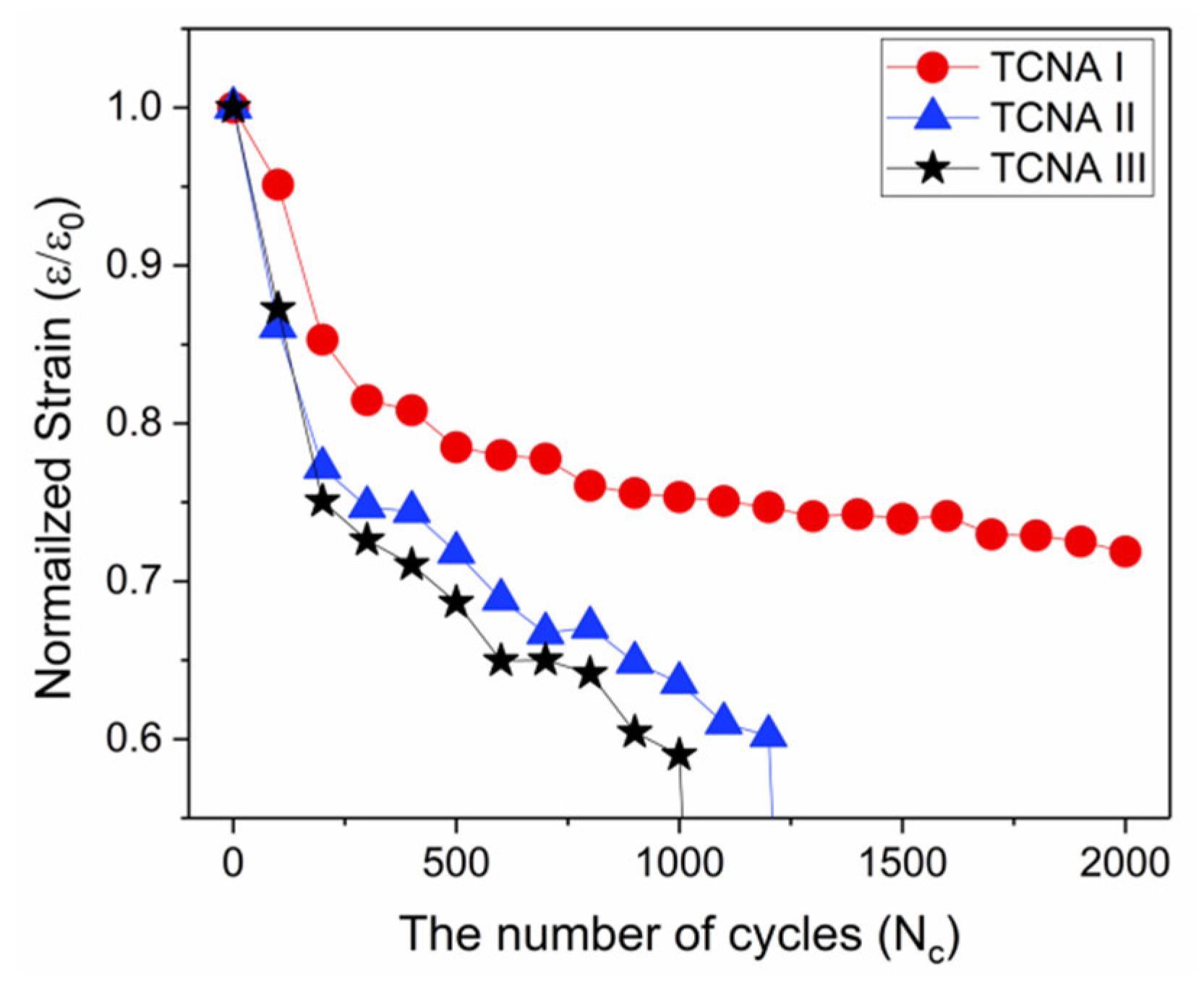
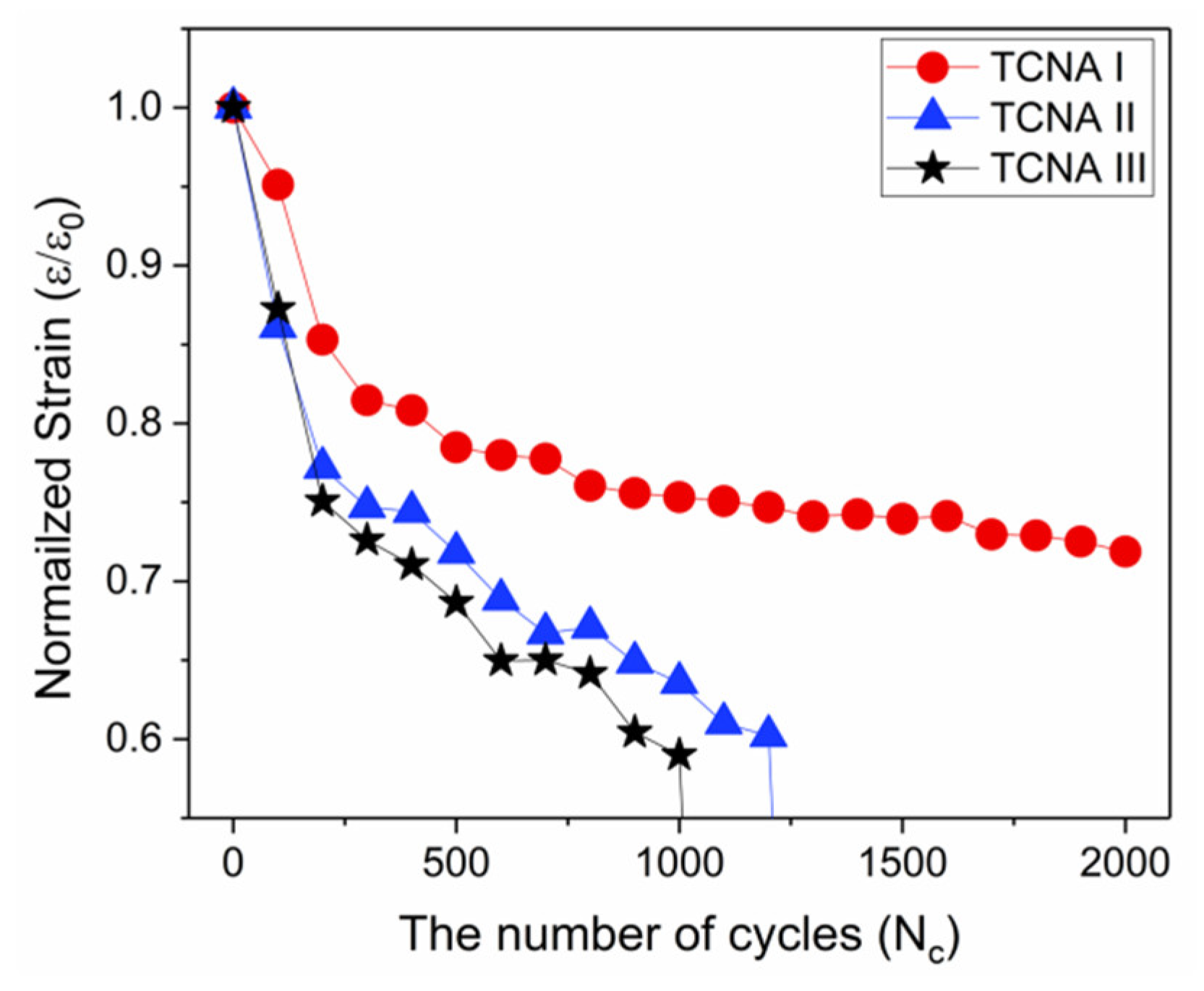
3.4. Durability Test of the TCNAs
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Haines, C.S.; Lima, M.D.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.D.W.; Kim, S.H.; Fang, S.; Jung de Andrade, M.; Göktepe, F.; et al. Artificial Muscles from Fishing Line and Sewing Thread. Science 2014, 343, 868–872. [Google Scholar] [CrossRef] [PubMed]
- Fan, J.; Li, G. High performance and tunable artificial muscle based on two-way shape memory polymer. RSC Adv. 2017, 7, 1127–1136. [Google Scholar] [CrossRef]
- Kanik, M.; Orguc, S.; Varnavides, G.; Kim, J.; Gonzalez, T.; Akintilo, T.; Tasan, C.; Chandrakasan, A.; Fink, Y.; Anikeeva, P. Strain-programmable fiber-based artificial muscle. Science 2019, 365, 145–150. [Google Scholar] [CrossRef]
- Yuan, J.; Neri, W.; Zakri, C.; Merzeau, P.; Kratz, K.; Lendlein, A.; Poulin, P. Shape memory nanocomposite fibers for untethered high-energy microengines. Science 2019, 365, 155–158. [Google Scholar] [CrossRef]
- Wang, R.; Fang, S.; Xiao, Y.; Gao, E.; Jiang, N.; Li, Y.; Mou, L.; Shen, Y.; Zhao, W.; Li, S.; et al. Torsional refrigeration by twisted, coiled, and supercoiled fibers. Science 2019, 366, 216–221. [Google Scholar] [CrossRef] [PubMed]
- Yoshida, K.; Nakajima, S.; Kawano, R.; Onoe, H. Spring-shaped stimuli-responsive hydrogel actuator with large deformation. Sens. Actuators B Chem. 2018, 272, 361–368. [Google Scholar] [CrossRef]
- Wang, Y.; Qiao, J.; Wu, K.; Yang, W.; Ren, M.; Dong, L.; Zhou, Y.; Wu, Y.; Wang, X.; Yong, Z.; et al. High-twist-pervaded electrochemical yarn muscles with ultralarge and fast contractile actuations. Mater. Horiz. 2020, 7, 3043–3050. [Google Scholar] [CrossRef]
- Roach, D.J.; Yuan, C.; Kuang, X.; Li, V.C.; Blake, P.; Romero, M.L.; Hammel, I.; Yu, K.; Qi, H.J. Long liquid crystal elastomer fibers with large reversible actuation strains for smart textiles and artificial muscles. ACS Appl. Mater. Interfaces 2019, 11, 19514–19521. [Google Scholar] [CrossRef]
- Maziz, A.; Concas, A.; Khaldi, A.; Stålhand, J.; Persson, N.-K.; Jager, W.H. Knitting and weaving artificial muscle. Sci. Adv. 2017, 3, e1600327. [Google Scholar] [CrossRef]
- Leng, X.; Hu, X.; Zhao, W.; An, B.; Zhou, X.; Liu, Z. Recent Advances in Twisted-Fiber Artificial Muscles. Adv. Intell. Syst. 2021, 3, 2000185. [Google Scholar] [CrossRef]
- Lamuta, C.; He, H.; Zhang, K.; Rogalski, M.; Sottos, N.; Tawfick, S. Digital texture voxels for stretchable morphing skin applications. Adv. Mater. Technol. 2019, 4, 1900260. [Google Scholar] [CrossRef]
- Li, Y.; Leng, X.; Sun, J.; Zhou, X.; Wu, W.; Chen, H.; Liu, Z. Moisture-sensitive torsional cotton artificial muscle and textile. Chin. Phys. B 2020, 29, 048103. [Google Scholar] [CrossRef]
- Mirvakili, S.M.; Hunter, I.W. Artificial Muscles: Mechanisms, Applications, and Challenges. Adv. Mater. 2018, 30, 1704407. [Google Scholar] [CrossRef] [PubMed]
- Jia, T.; Wang, Y.; Dou, Y.; Li, Y.; Andrade, M.J.; Wang, R.; Fang, S.; Li, J.; Yu, Z.; Qiao, R.; et al. Moisture sensitive smart yarns and textiles from self-balanced silk fiber muscle. Adv. Funct. Mater. 2019, 29, 1808241. [Google Scholar] [CrossRef]
- Mendes, S.S.; Nunes, L.C.S. Experimental Approach to Investigate the Constrained Recovery Behavior of Coiled Monofilament Polymer Fibers. Smart Mater. Struct. 2017, 26, 115031. [Google Scholar] [CrossRef]
- Cherubini, A.; Moretti, G.; Vertechy, R.; Fontana, M. Experimental Characterization of Thermally-Activated Artificial Muscles Based on Coiled Nylon Fishing Lines. AIP Adv. 2015, 5, 067158. [Google Scholar] [CrossRef]
- Chen, J.; Pakdel, E.; Xie, W.; Sun, L.; Xu, M.; Liu, Q.; Wang, D. High-Performance Natural Melanin/Poly(Vinyl Alcohol-Co-Ethylene) Nanofibers/PA6 Fiber for Twisted and Coiled Fiber-Based Actuator. Adv. Fiber Mater. 2020, 2, 64–73. [Google Scholar] [CrossRef]
- Mirvakili, S.M.; Ravandi, A.R.; Hunter, I.W.; Haines, C.S.; Li, N.; Foroughi, J.; Naficy, S.; Spinks, G.M.; Baughman, R.H.; Madden, J.D.W. Simple and Strong: Twisted Silver Painted Nylon Artificial Muscle Actuated by Joule Heating. In Electroactive Polymer Actuators and Devices (EAPAD) 2014; SPIE: Bellingham, WA, USA, 2014; Volume 9056. [Google Scholar] [CrossRef]
- Hiraoka, M.; Nakamura, K.; Arase, H.; Asai, K.; Kaneko, Y.; John, S.W.; Tagashira, K.; Omote, A. Power-Efficient Low-Temperature Woven Coiled Fibre Actuator for Wearable Applications. Sci. Rep. 2016, 6, 36358. [Google Scholar] [CrossRef]
- Park, J.; Yoo, J.W.; Seo, H.W.; Lee, Y.; Suhr, J.; Moon, H.; Koo, J.C.; Choi, H.R.; Hunt, R.; Kim, K.J.; et al. Electrically Controllable Twisted-Coiled Artificial Muscle Actuators Using Surface-Modified Polyester Fibers. Smart Mater. Struct. 2017, 26, 035048. [Google Scholar] [CrossRef]
- Pyo, D.; Lim, J.-M.; Mun, S.; Yun, S. Silver-Nanowires Coated Pitch-Tuned Coiled Polymer Actuator for Large Contractile Strain under Light-Loading. Int. J. Precis. Eng. Manuf. 2018, 19, 1895–1900. [Google Scholar] [CrossRef]
- van der Weijde, J.; Smit, B.; Fritschi, M.; van de Kamp, C.; Vallery, H. Self-Sensing of Deflection, Force, and Temperature for Joule-Heated Twisted and Coiled Polymer Muscles via Electrical Impedance. IEEE/ASME Trans. Mechatron. 2017, 22, 1268–1275. [Google Scholar] [CrossRef]
- Padgett, M.E.; Mascaro, S.A. Investigation of Manufacturing Parameters for Copper-Wound Super-Coiled Polymer Actuators. In Electroactive Polymer Actuators and Devices (EAPAD) XXI; SPIE: Bellingham, WA, USA, 2019; Volume 10966. [Google Scholar] [CrossRef]
- Zhou, D.; Zuo, W.; Tang, X.; Deng, J.; Liu, Y. A multi-motion bionic soft hexapod robot driven by self-sensing controlled twisted artificial muscle. Bioinspir. Biomim. 2021, 16, 045003. [Google Scholar] [CrossRef]
- Kwon, Y.-T.; Kim, Y.-S.; Lee, Y.; Kwon, S.; Lim, M.; Song, Y.; Choa, Y.-H.; Yeo, W.-H. Ultrahigh conductivity and superior interfacial adhesion of a nanostructured, photonic-sintered copper membrane for printed flexible hybrid electronics. ACS Appl. Mater. Interfaces 2018, 10, 44071–44079. [Google Scholar] [CrossRef] [PubMed]
- Lee, M.; Lee, M.S.; Wakida, T.; Tokuyama, T.; Inoue, G.; Ishida, S.; Itazu, T.; Miyaji, Y. Chemical Modification of Nylon 6 and Polyester Fabrics by Ozone-Gas Treatment. J. Appl. Polym. Sci. 2006, 100, 1344–1348. [Google Scholar] [CrossRef]
- Drelich, J.; Chibowski, E.; Meng, D.D.; Terpilowski, K. Hydrophilic and Superhydrophilic Surfaces and Materials. Soft Matter. 2011, 7, 9804–9828. [Google Scholar] [CrossRef]
- SelegArd, L.; Khranovskyy, V.; Soderlind, F.; Vahlberg, C.; Ahren, M.; Kall, P.O.; Yakimova, R.; Uvdal, K. Biotinylation of ZnO nanoparticles and thin films: A two-step surface functionalization study. ACS Appl. Mater. Interfaces 2010, 2, 21288–22135. [Google Scholar] [CrossRef]
- Wang, Y.; Luo, S.; Ren, K.; Zhao, S.; Chen, Z.; Li, W.; Guan, J. Facile Preparation of Graphite Particles Fully Coated with Thin Ag Shell Layers for High Performance Conducting and Electromagnetic Shielding Composite Materials. J. Mater. Chem. C 2016, 4, 2566–2578. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C 1s | O 1s | N 1s | Si 2p | S 2p | |
|---|---|---|---|---|---|
| Pristine nylon-6 | 75.87 | 11.63 | 12.05 | 0.26 | 0.18 |
| MPTMS-nylon-6 | 65.70 | 20.17 | 8.54 | 3.22 | 2.38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yun, S.; Mun, S.; Park, S.K.; Hwang, I.; Choi, M. A Thermo-Mechanically Robust Compliant Electrode Based on Surface Modification of Twisted and Coiled Nylon-6 Fiber for Artificial Muscle with Highly Durable Contractile Stroke. Polymers 2022, 14, 3601. https://doi.org/10.3390/polym14173601
Yun S, Mun S, Park SK, Hwang I, Choi M. A Thermo-Mechanically Robust Compliant Electrode Based on Surface Modification of Twisted and Coiled Nylon-6 Fiber for Artificial Muscle with Highly Durable Contractile Stroke. Polymers. 2022; 14(17):3601. https://doi.org/10.3390/polym14173601
Chicago/Turabian StyleYun, Sungryul, Seongcheol Mun, Seung Koo Park, Inwook Hwang, and Meejeong Choi. 2022. "A Thermo-Mechanically Robust Compliant Electrode Based on Surface Modification of Twisted and Coiled Nylon-6 Fiber for Artificial Muscle with Highly Durable Contractile Stroke" Polymers 14, no. 17: 3601. https://doi.org/10.3390/polym14173601
APA StyleYun, S., Mun, S., Park, S. K., Hwang, I., & Choi, M. (2022). A Thermo-Mechanically Robust Compliant Electrode Based on Surface Modification of Twisted and Coiled Nylon-6 Fiber for Artificial Muscle with Highly Durable Contractile Stroke. Polymers, 14(17), 3601. https://doi.org/10.3390/polym14173601