Numerical Model Study of Multiple Dendrite Motion Behavior in Melt Based on LBM-CA Method

Abstract
1. Introduction
2. Materials and Methods
2.1. CA Model
2.2. LBM Model
2.3. Ladd Method to Calculate the Solid-liquid Interface Interaction Force
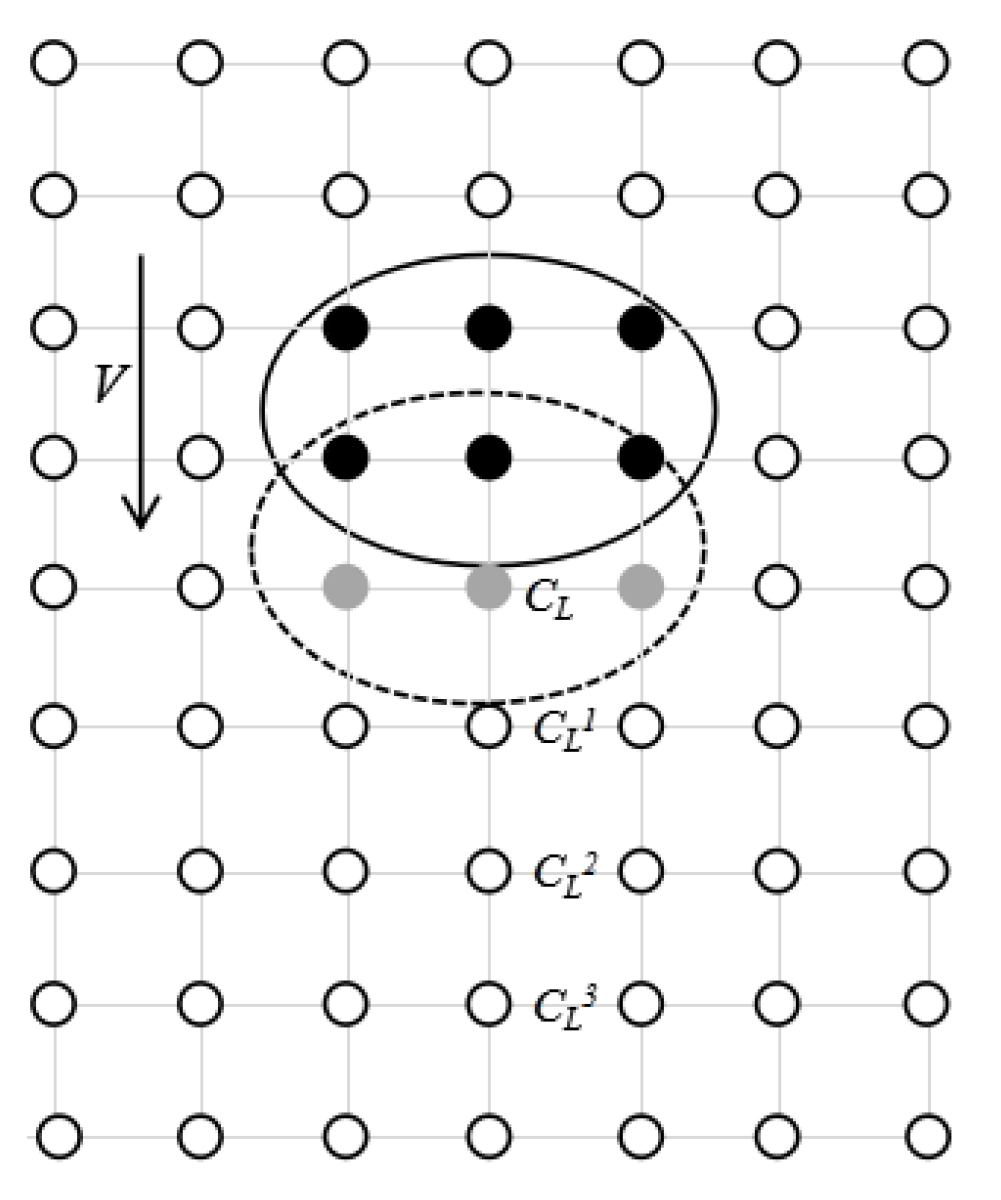
2.4. Processing of Solute Fields at Moving Boundaries
3. Verification
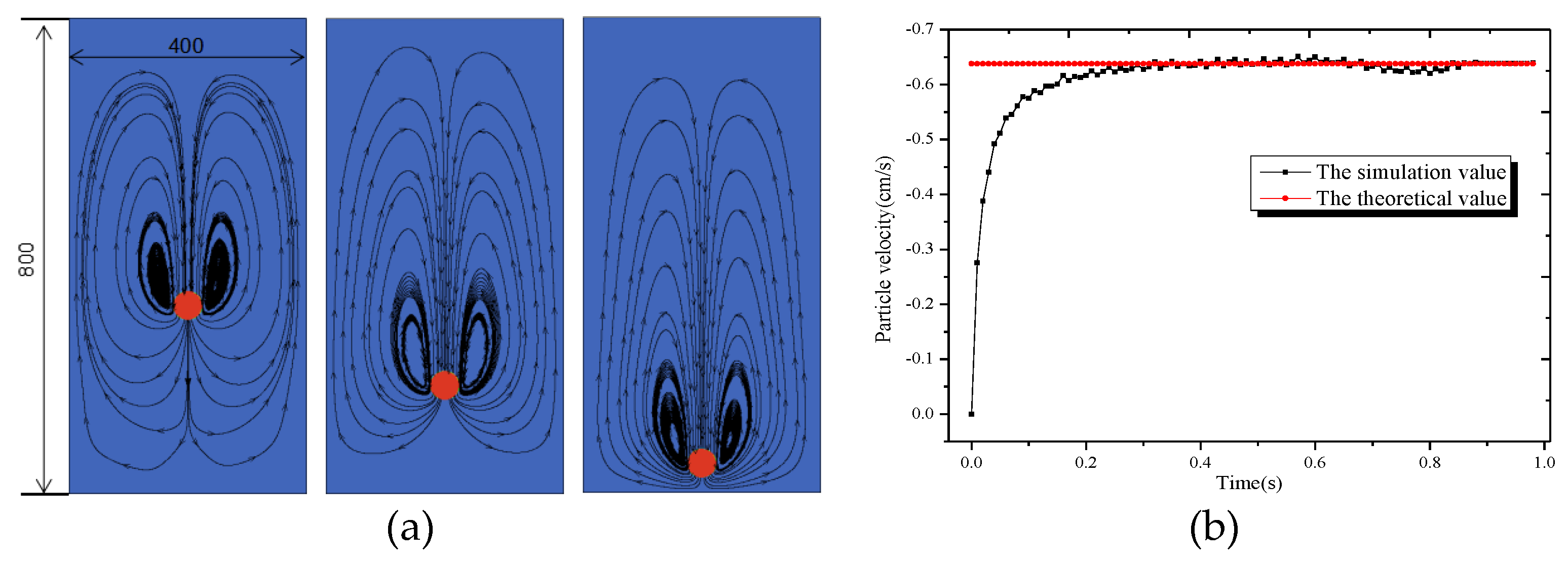
3.1. Settling of a Circular Particle in an Infinitely Long Tube
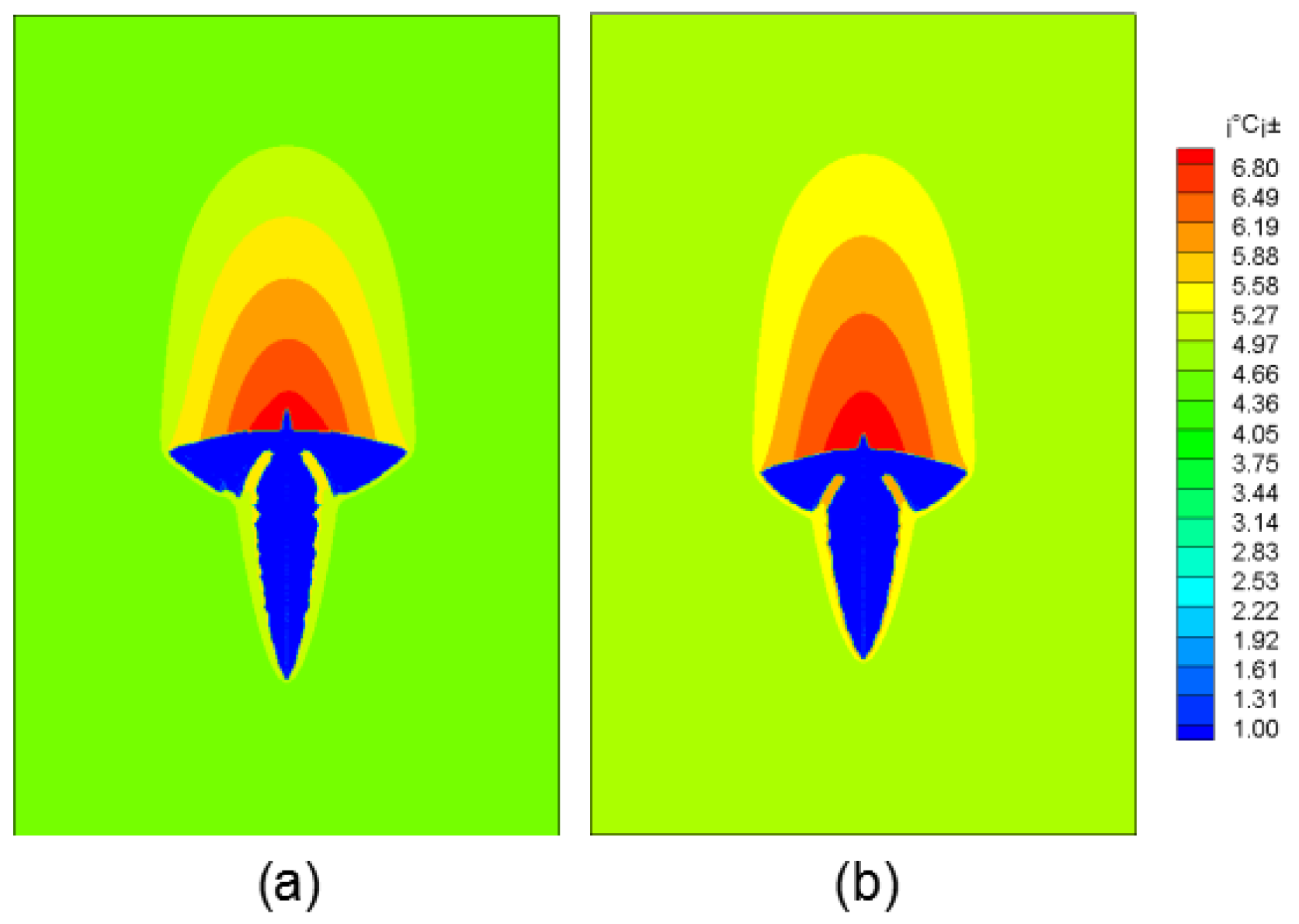
3.2. Calculation of the Solute Field
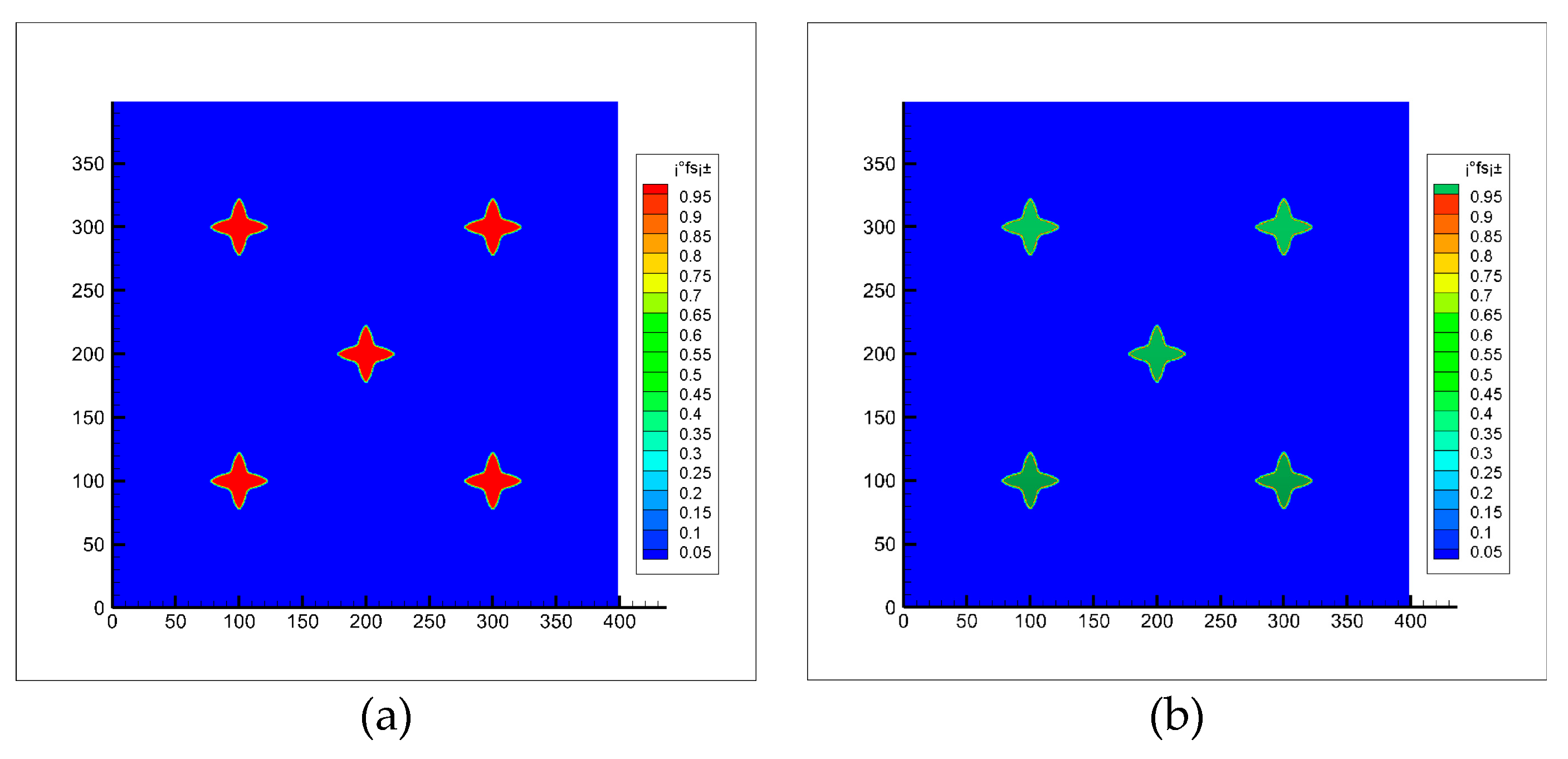
3.3. Multiple Dendrites Rotation
4. Discussion
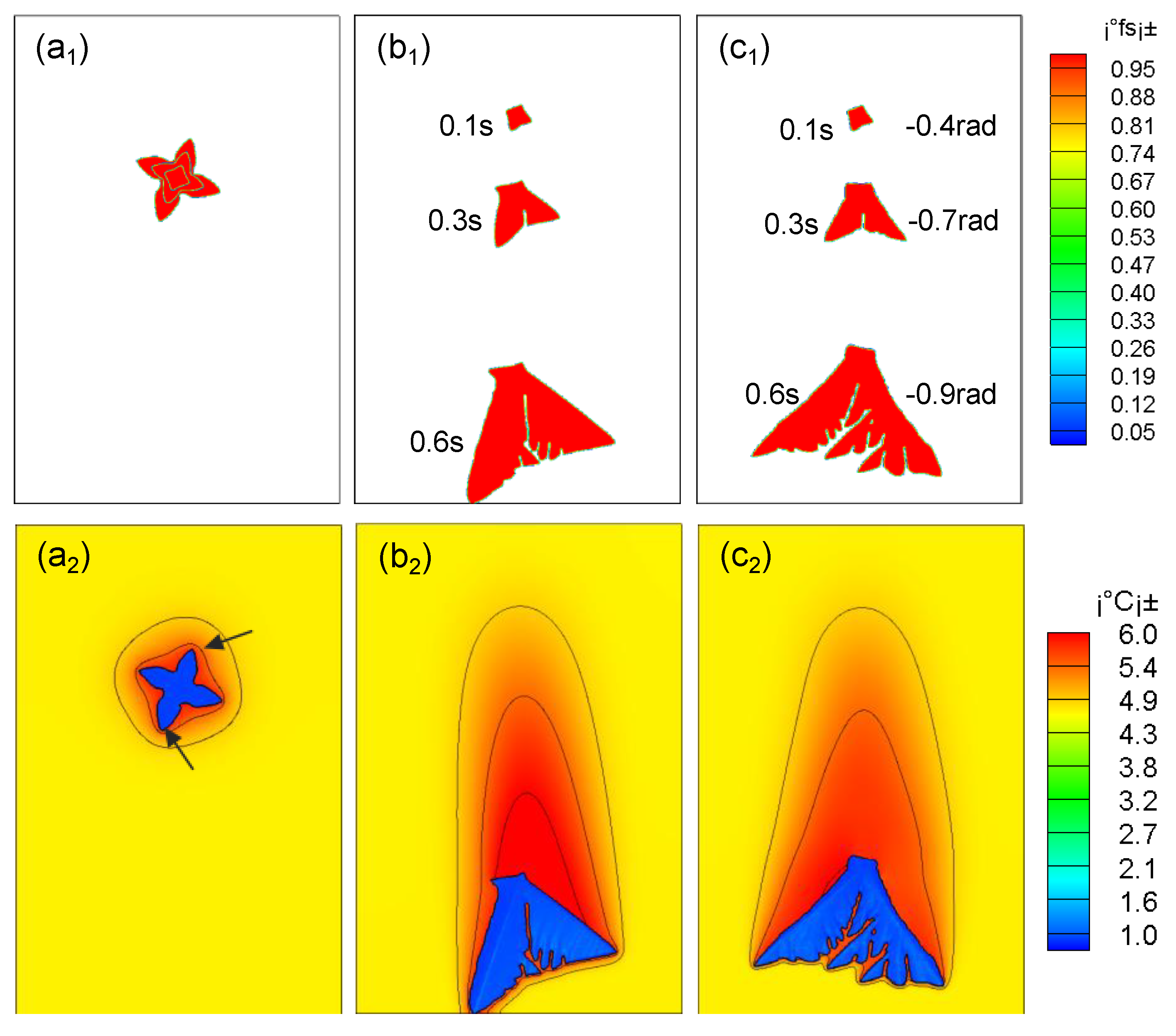
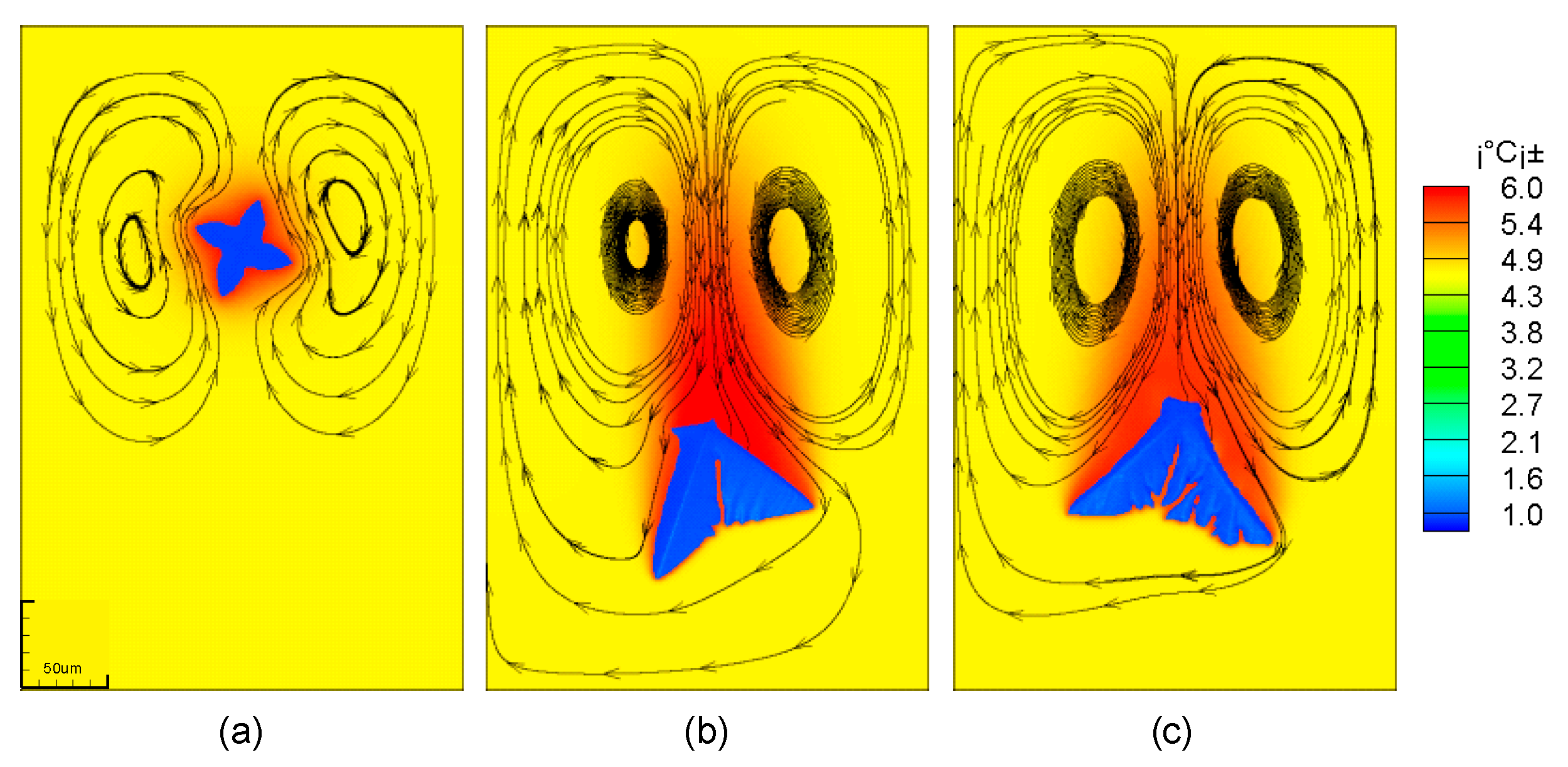
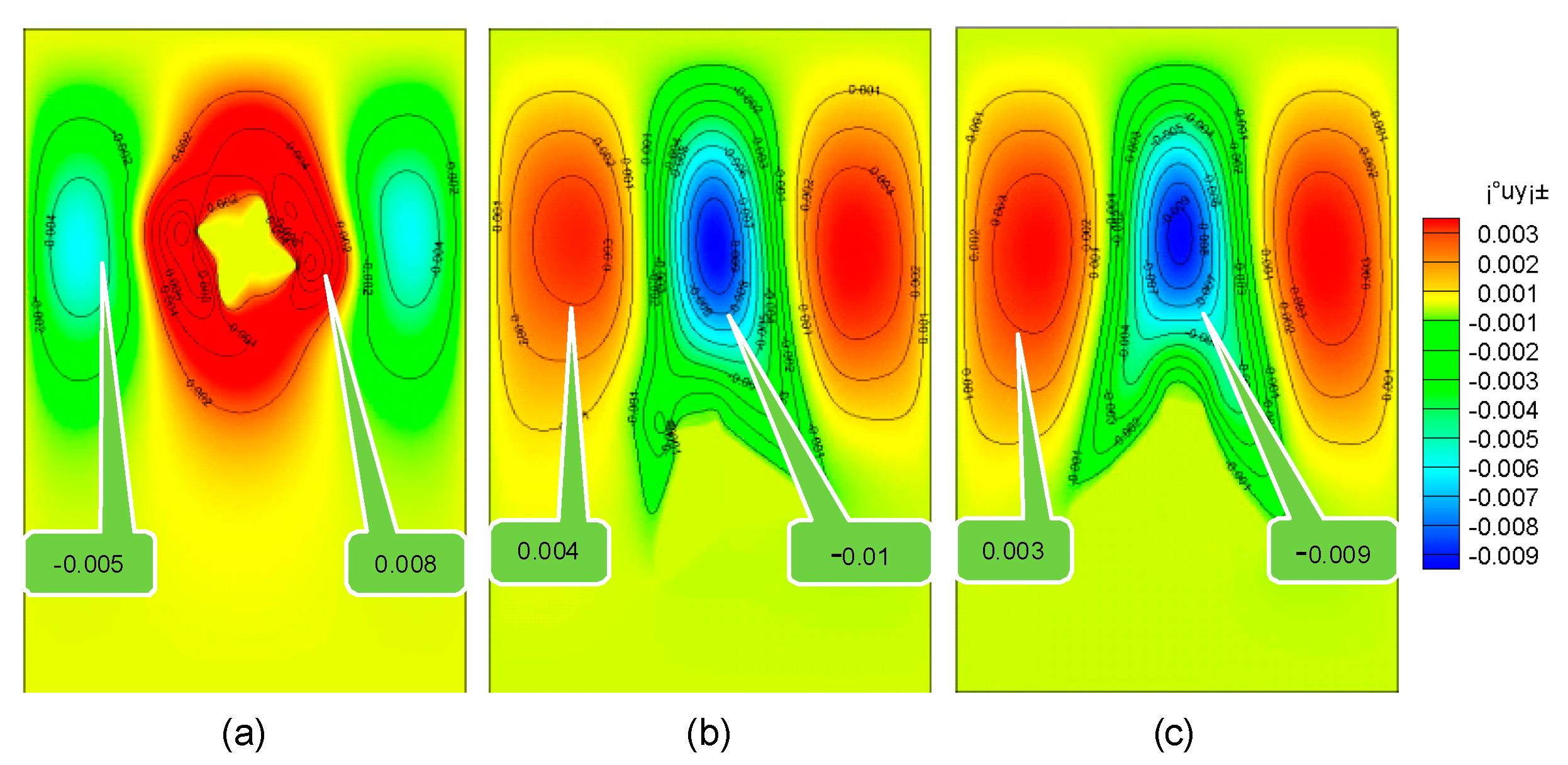
4.1. Single Dendrite Movement
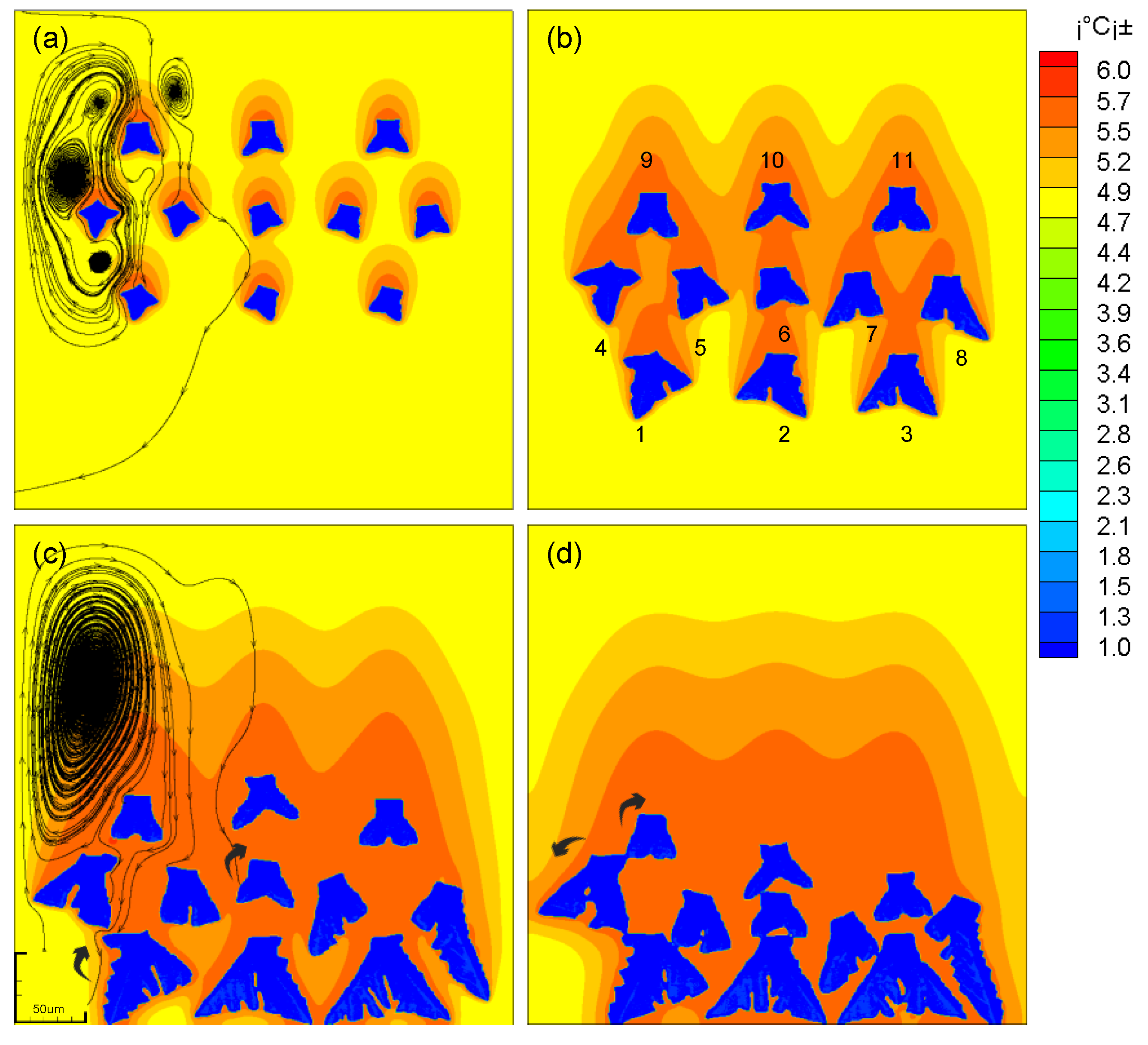
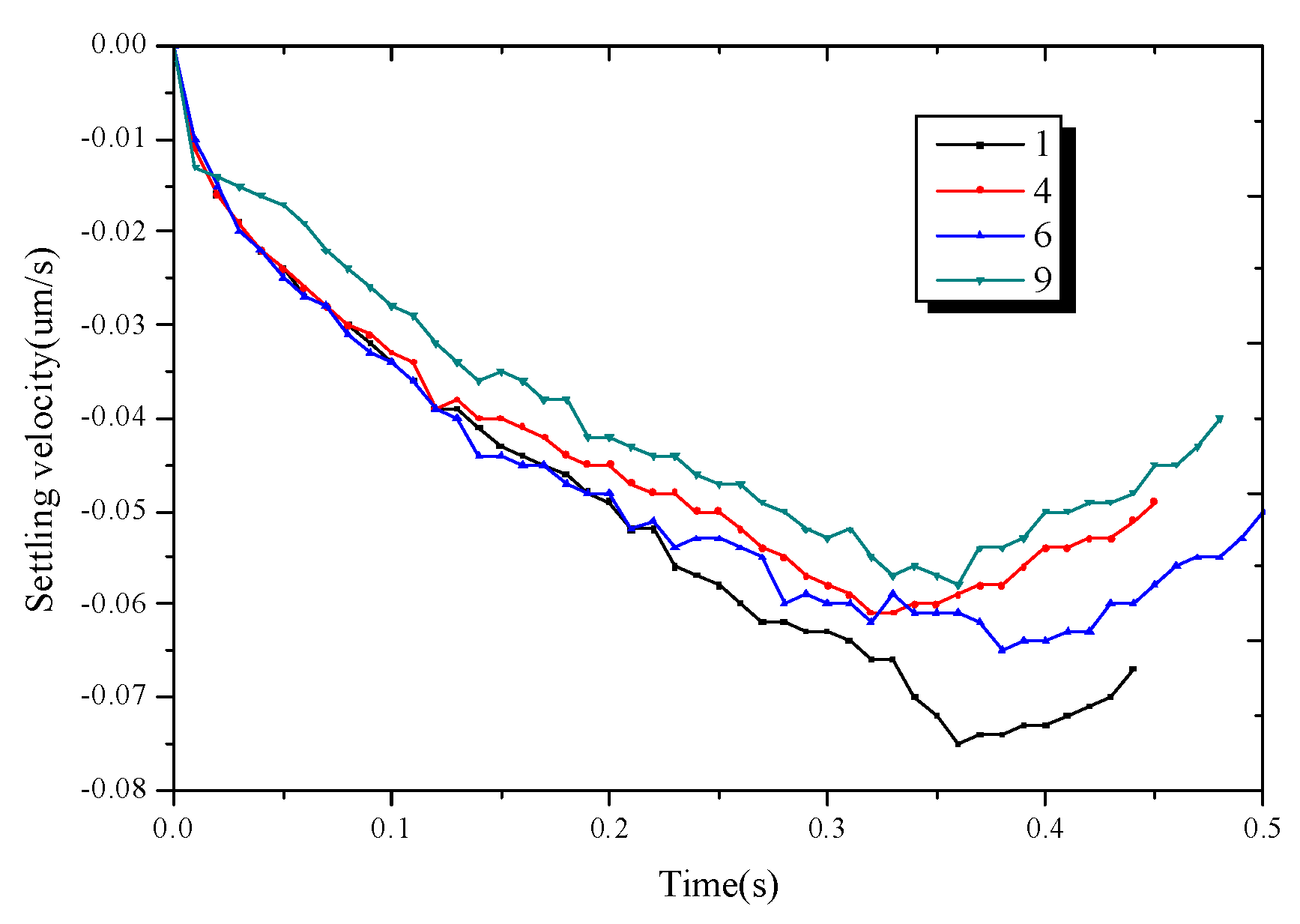
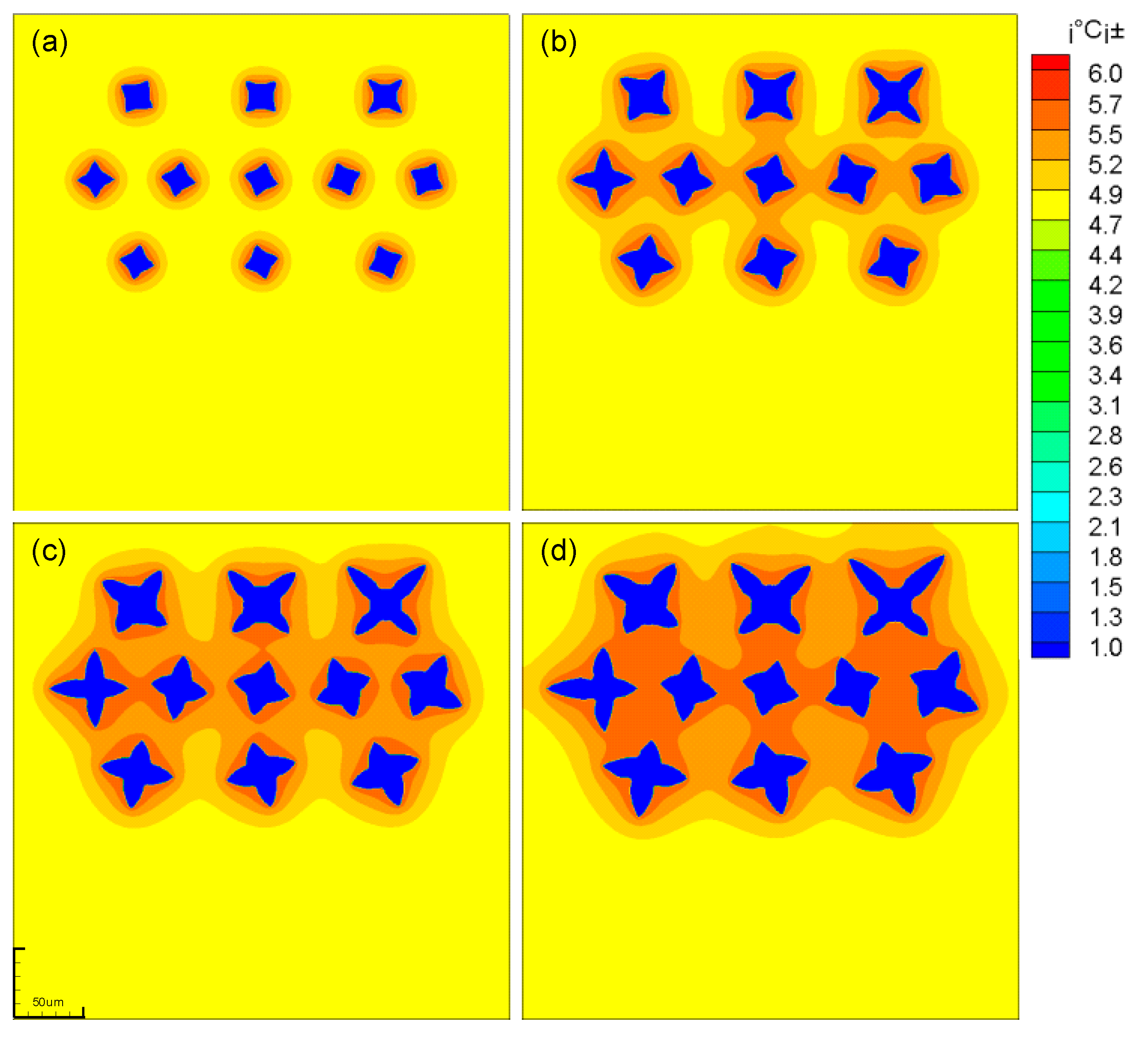
4.2. Multi-Dendrite Movement
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Symbols | Unit | Meaning |
| mass% | Solid fraction | |
| mass% | Actual solute concentration at interface | |
| mass% | Liquid-phase equilibrium crystallization concentration at the interface | |
| mass% | Solid fraction increment | |
| — | Equilibrium partition coefficient of solute | |
| mass% | Initial concentration of the alloy | |
| K | Actual temperature of the interface | |
| K | Equilibrium liquidus temperature | |
| k/mass% | Liquidus slope | |
| m·K | Gibbs-Thomson coefficient | |
| 1/m | Average curvature at the solid / liquid interface | |
| — | Anisotropic function | |
| — | Anisotropic strength of interface energy | |
| — | Anisotropic coefficient | |
| deg | Preferred growth direction | |
| deg | Growth angle | |
| — | Relaxation time of flow field | |
| — | Relaxation time of temperature field | |
| — | Relaxation time of concentration field | |
| m2/s | Fluid viscosity | |
| m2/s | Thermal diffusivity | |
| m2/s | Concentration diffusion coefficient | |
| Kg/m3 | Initial density of fluid | |
| K | Initial temperature | |
| K−1 | Volume expansion coefficient of temperature change | |
| Mass%−1 | Volume expansion coefficient of concentration change | |
| — | Weight coefficient | |
| m/s | Discrete velocity | |
| m/s | Lattice velocity | |
| Kg | Mass | |
| Kg·m2 | Moment of inertia | |
| m/s2 | Gravitational acceleration | |
| N | The force of fluid on dendrite | |
| N·m | Force moment | |
| N | The component force of the particle in the i direction | |
| mass% | Source term of concentration field | |
| K | Source term of temperature field | |
| m/s | Macroscopic velocity | |
| K | Undercooling |
References
- Flemings, M.C. Our Understanding of Macrosegregation: Past and Present. Trans. Iron Steel Inst. Jpn. 2000, 40, 838–841. [Google Scholar] [CrossRef]
- Wu, M.; Ludwig, A.; Bührig-Polaczek, A.; Fehlbier, M.; Sahm, P.R. Influence of convection and grain movement on globular equiaxed solidification. Int. J. Heat Mass Transf. 2003, 46, 2819–2832. [Google Scholar] [CrossRef]
- Wu, M.; Ludwig, A. Modeling equiaxed solidification with melt convection and grain sedimentation—II. Model verification. Acta Mater. 2009, 57, 5632–5644. [Google Scholar] [CrossRef]
- Liu, B.; Xu, Q.; Jing, T.; Shen, H.; Han, Z. Advances in multi-scale modeling of solidification and casting processes. JOM 2011, 63, 19–25. [Google Scholar] [CrossRef]
- Do-Quang, M.; Amberg, G. Simulation of free dendritic crystal growth in a gravity environment. J. Comput. Phys. 2008, 227, 1772–1789. [Google Scholar] [CrossRef]
- Karagadd, S.; Bhattacharya, A.; Tomar, G.; Dutta, P. A coupled VOF-IBM-enthalpy approach for modeling motion and growth of equiaxed dendrites in a solidifying melt. J. Comput. Phys. 2012, 231, 3987–4000. [Google Scholar] [CrossRef]
- Medvedev, D.; Varnik, F.; Steinbach, I. Simulating mobile dendrites in a flow. Procedia Comput. Sci. 2013, 18, 2512–2520. [Google Scholar] [CrossRef]
- Rojas, R.; Takaki, T.; Ohno, M. A phase-field-lattice Boltzmann method for modeling motion and growth of a dendrite for binary alloy solidification in the presence of melt convection. J. Comput. Phys. 2015, 298, 29–40. [Google Scholar] [CrossRef]
- Takaki, T.; Rojas, R.; Ohno, M.; Shimokawabe, T.; Aoki, T. GPU phase-field lattice Boltzmann simulations of growth and motion of a binary alloy dendrite. IOP Conf. Ser. Mater. Sci. Eng. 2015, 84, 012006. [Google Scholar] [CrossRef]
- Qi, X.; Chen, Y.; Kang, X.; Li, D.; Gong, T. Modeling of coupled motion and growth interaction of equiaxed dendritic crystals in a binary alloy during solidification. Sci. Rep. 2017, 7, 45770. [Google Scholar] [CrossRef]
- Takaki, T.; Sato, R.; Rojas, R.; Ohno, M.; Shibuta, Y. Phase-field lattice Boltzmann simulations of multiple dendrite growth with motion, collision, and coalescence and subsequent grain growth. Comput. Mat. Sci. 2018, 147, 124–131. [Google Scholar] [CrossRef]
- Conti, M. Solidification of binary alloys: Thermal effects studied with the phase-field model. Phys. Rev. E 1997, 55, 765–771. [Google Scholar] [CrossRef]
- Liu, L.; Pian, S.; Zhang, Z.; Bao, R.; Li, H.; Chen, A. cellular automaton-lattice Boltzmann method for modeling growth and settlement of the dendrites for Al-4.7%Cu solidification. Comput. Mat. Sci. 2018, 146, 9–17. [Google Scholar] [CrossRef]
- Zhu, M.; Stefanescu, D.M. Virtual front tracking model for the quantitative modeling of dendritic growth in solidification of alloys. Acta Mater. 2007, 55, 1741–1755. [Google Scholar] [CrossRef]
- Zhu, M.; Hong, C. A modified cellular automaton model for the simulation of dendritic growth in solidification of alloys. ISIJ Int. 2001, 41, 436–445. [Google Scholar] [CrossRef]
- Yin, H.; Felicelli, S.D.; Wang, L. Simulation of a dendritic microstructure with the lattice Boltzmann and cellular automaton methods. Acta Mater. 2011, 59, 3124–3136. [Google Scholar] [CrossRef]
- Mohsen, A.Z.; Hebi, Y. Comparison of cellular automaton and phase field models to simulate dendrite growth in hexagonal crystals. J. Mat. Sci. Technol. 2012, 28, 137–146. [Google Scholar]
- Glowinski, R.; Pan, T.W.; Hesla, T.I.; Joseph, D.D.; Périaux, J. A Fictitious Domain Approach to the Direct Numerical Simulation of Incompressible Viscous Flow past Moving Rigid Bodies: Application to Particulate Flow. J. Comput. Phys. 2001, 169, 363–426. [Google Scholar] [CrossRef]
- Happel, J.; Brenner, H. Low Reynolds Number Hydrodynamics; Martinus Nijhoff Publishers: Boston, MA, USA, 1983; pp. 113–119. [Google Scholar]
- Bi, C.; Guo, Z.; Liotti, E.; Xiong, S. Quantification study on dendrite fragmentation in solidification process of alluminum alloys. Acta Metall. Sin. 2015, 51, 677–684. [Google Scholar]
- Kaldre, I.; Fautrelle, Y.; Etay, J.; Bojarevics, A.; Buligins, L. Investigation of Liquid Phase Motion Generated by the Thermoelectric Current and Magnetic Field Interaction. Magnetohydrodynamics 2010, 46, 371–380. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Parameter | Symbol | Value |
|---|---|---|
| Melting temperature | Tm (K) | 933.3 |
| Liquidus temperature | TL (K) | 917 |
| Solidus temperature | TS (K) | 821 |
| Liquidus slope | M (m·K/%) | −3.44 |
| Thermal diffusivity | A (m2·s−1) | 2.7 × 10−7 |
| Fluid viscosity | Ν (m2·s−1) | 1.2 × 10−6 |
| Diffusivity in liquid | D (m2·s−1) | 3.0 × 10−9 |
| Partition coefficient | k | 0.145 |
| Liquid density | Ρ (kg·m−3) | 2606 |
| Dendrite Rotation Angle (rad) | ||||
|---|---|---|---|---|
| Time (s) | No. 1 | No. 4 | No. 4 | No. 9 |
| 0 | −0.2 | 0.1 | −0.3 | −0.6 |
| 0.1 | −0.2 | 0.1 | −0.3 | −0.6 |
| 0.2 | −0.3 | 0 | −0.4 | −0.7 |
| 0.3 | −0.4 | 0 | −0.6 | −0.8 |
| 0.4 | −0.5 | 0.3 | −0.6 | −0.8 |
| 0.5 | −0.5 | 0.5 | −0.5 | −0.8 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Y.; Wang, Y.; Zhang, S.; Wang, Q.; Li, R. Numerical Model Study of Multiple Dendrite Motion Behavior in Melt Based on LBM-CA Method. Crystals 2020, 10, 70. https://doi.org/10.3390/cryst10020070
Bai Y, Wang Y, Zhang S, Wang Q, Li R. Numerical Model Study of Multiple Dendrite Motion Behavior in Melt Based on LBM-CA Method. Crystals. 2020; 10(2):70. https://doi.org/10.3390/cryst10020070
Chicago/Turabian StyleBai, Yu, Yingming Wang, Shijie Zhang, Qi Wang, and Ri Li. 2020. "Numerical Model Study of Multiple Dendrite Motion Behavior in Melt Based on LBM-CA Method" Crystals 10, no. 2: 70. https://doi.org/10.3390/cryst10020070
APA StyleBai, Y., Wang, Y., Zhang, S., Wang, Q., & Li, R. (2020). Numerical Model Study of Multiple Dendrite Motion Behavior in Melt Based on LBM-CA Method. Crystals, 10(2), 70. https://doi.org/10.3390/cryst10020070