
A Novel Crowdsourcing-Assisted 5G Wireless Signal Ranging Technique in MEC Architecture

Abstract
1. Introduction
- Data collection efficiency bottleneck: Traditional signal database construction relies on manual drive tests, which require professional teams to collect signal features point by point. In a scenario involving ultra-dense 5G networks, the reduced coverage of each base station dramatically increases the number of points to be collected, resulting in long data collection cycles and high costs, severely restricting the scalability of the technology.
- Insufficient dynamic environmental adaptability: Existing static signal databases fail to adapt to dynamic changes in wireless signal propagation paths, leading to significant deviations in ranging results over time. Although some studies have attempted to introduce re-collection mechanisms, their high operational and maintenance costs are not sustainable.
- Limited system scalability: Cloud-based signal matching architectures require terminal measurement data to be transmitted back to remote servers, increasing network latency. Additionally, schemes using complex AI models for incremental updates impose excessive demands on base station computational resources, making it difficult to support large-scale concurrent requests from terminals.
- A general 5G wireless signal ranging framework integrating crowdsourced perception and MEC architecture is proposed. For dynamic environmental characteristics, the framework can collaborate with multiple algorithms to achieve continuous optimization of the signal fingerprint database with low computational overhead. Through distributed data collection and edge computing, the framework systematically addresses the three major challenges, namely, data acquisition cost, environmental adaptability, and resource constraints.
- A progressive signal fingerprint update algorithm is designed, enabling the autonomous evolution of ranging reference data in dynamic environments, overcoming the performance degradation bottleneck of traditional static models.
- A lightweight edge-ranging service engine is developed to validate the effectiveness of the MEC architecture in reducing network load and improving service response speed, providing a feasible solution for the practical deployment of 5G base station-assisted ranging technology.
2. Background and Related Work
2.1. Wireless Signal Ranging Technology
2.1.1. Base Station-Assisted Signal Ranging
2.1.2. Bluetooth-Assisted Signal Ranging
2.1.3. LoRa-Assisted Signal Ranging
2.2. Environment Perception Fingerprint Collection
2.2.1. Traditional Street Scanning Method
2.2.2. Grid-Based Street Scanning Method
3. Solution Design
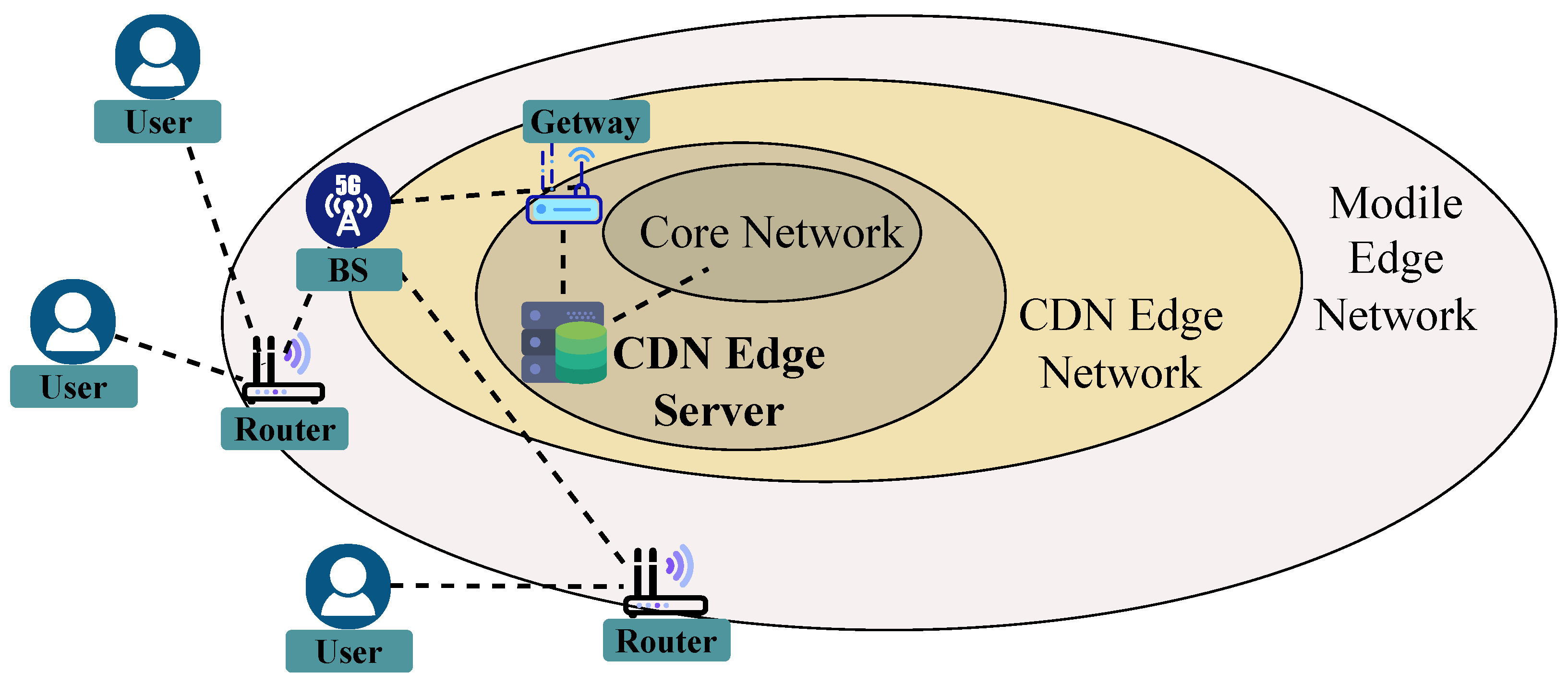
3.1. Mobile Network Edge Deployment
- Device layer: Data are encrypted during transmission through routers and base stations (BS).
- Edge layer: CDN edge servers perform identity verification and control data access rights via gateways.
- Core layer: The core network only receives processed non-sensitive data.
3.2. Main Modules of the Environment Perception Server
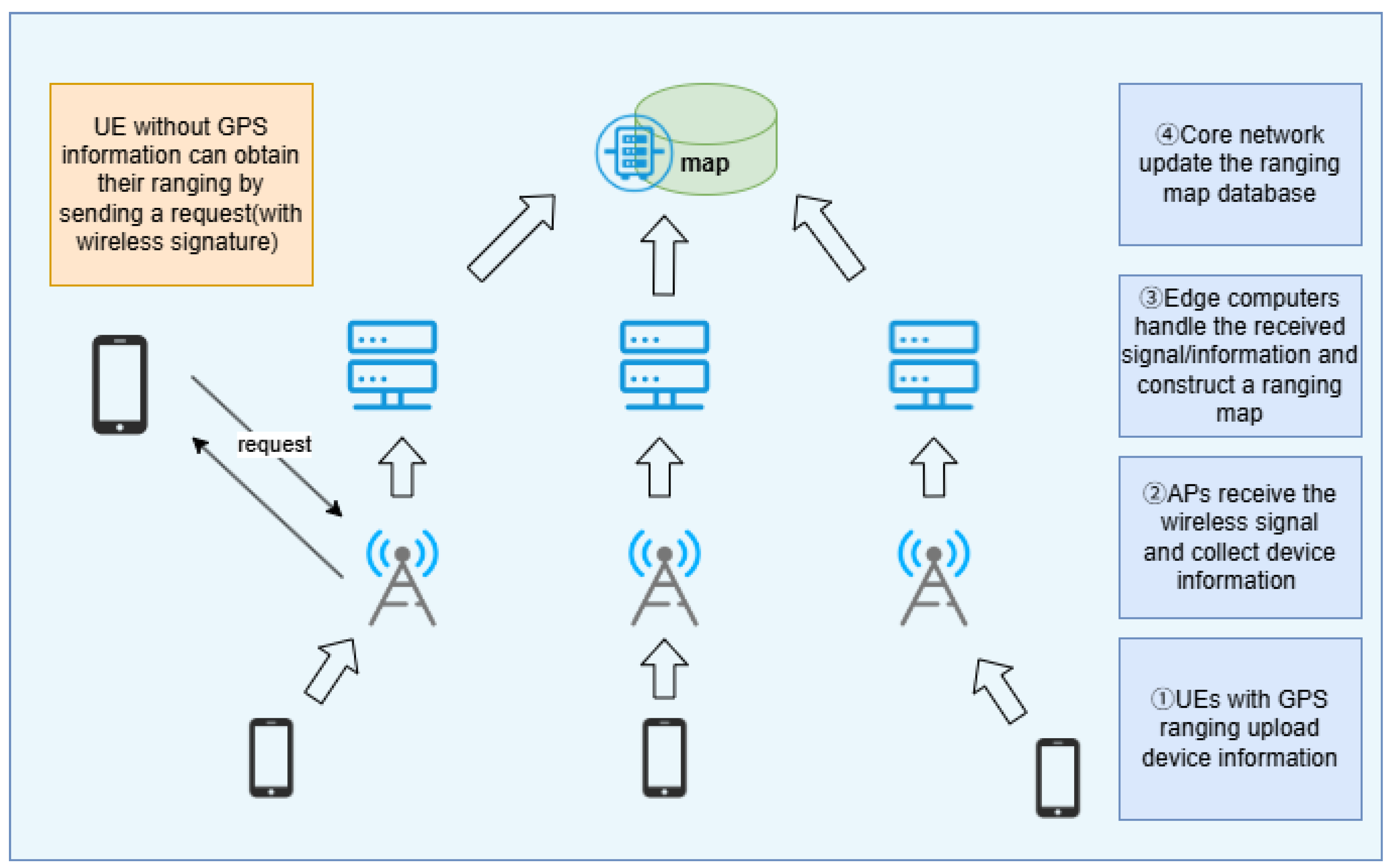
3.3. Workflow for UE Environment Perception
| Algorithm 1: UE environmental sensing workflow |
Input: UE_ID, (Signal Features) Output: R (Response) Step 1: Send sensing req. Send_Req(UE_ID, Step 2: Signal coll. , Coll_Sig Step 3: Signal up. Send_Data(UE_ID) Step 4: Env. sensing match. DB (Fingerprint Database), DB = Pre_col. Fingerprints, Match(S, DB), MS = Comp_Sim(S, DB) Step 5: Signal proc. Sig_Proc, Noise_Red Step 6: Env. sensing resp. Gen_Resp, Send_Resp(UE_ID, R) Step 7: Env. sensing update. Upd_Sig(UE_ID) if Trig_Cond |
- Environmental sensing request.UE first sends an environmental sensing request to the environmental sensing server. The request includes the UE’s device ID and the wireless signal features of the current environment (such as signal strength, frequency, delay, etc.), which serve as the basis for subsequent signal matching and analysis computations. Through this request, UE informs the environmental sensing server of the current data collection needs and device status, ensuring that the system can process the signal data accordingly.
- Wireless signal collection.UE starts to collect wireless signal features from the current environment according to the environmental sensing server’s requirements. The wireless signal features include important parameters such as Wi-Fi, cellular network, Bluetooth signal strength, frequency, and delay. UE uses its wireless module to collect multiple signal data in real time from the environment, providing necessary input for subsequent environmental sensing analysis.
- Signal upload.UE uploads the collected wireless signal features to the environmental sensing server via the network. The uploaded data includes the collected signal features, device ID, and other related information, which will be used as input for further environmental sensing analysis. During the upload process, the signal features and other environmental information are transmitted to the server, ensuring the system can utilize this information for subsequent calculations.
- Environmental sensing matching.After receiving UE’s environmental sensing request and wireless signal features, the environmental sensing server performs a matching analysis using the pre-built signal fingerprint database. The server compares the wireless signal features uploaded by the UE with the signal features already collected in the database, using a matching algorithm to find the most similar signal feature sets. This process ensures that the system can accurately identify the environmental characteristics based on the signal data, thus providing support for environmental sensing calculations.
- Signal analysis and processing.After environmental sensing matching, the environmental sensing server performs further analysis and processing on the matched signal feature data. Using signal processing algorithms, the system extracts key environmental information from the matched data and optimizes it. This stage of processing includes not only signal strength matching but also the application of signal attenuation models, noise filtering, etc. This process ensures that the most representative environmental information is extracted from a large volume of signal data for subsequent analysis.
- Environmental sensing response.After completing signal matching and analysis processing, the environmental sensing server returns the calculated results as a response to the UE. This response includes the environmental sensing information of UE’s current environment, such as the trend of signal strength changes, environmental interference levels, and the number of available signal sources. The specific environmental sensing data will be customized according to the system design to meet the needs of different scenarios.
- Environmental sensing update.To maintain the timeliness and accuracy of the data, UE can periodically update its collected environmental signal feature data based on the requirements of the environmental sensing server. The environmental sensing update mechanism ensures that the system maintains high data processing efficiency in a dynamically changing environment and can adapt to new network conditions or user demands. UE actively collects new signal features based on trigger conditions or preset time intervals and uploads them to the environmental sensing server for analysis and updating.
4. Technical Advantages of Our Solution
4.1. Efficient Signal Fingerprint Database Construction and Dynamic Updating Mechanism
4.2. Mobile Edge Computing (MEC) Accelerating Signal Processing and Real-Time Ranging
4.3. High-Precision Ranging Based on 5G Millimeter-Wave Technology
5. Experimental Verification and Results
5.1. Experimental Setup
5.2. Framework Performance Analysis
5.3. Results Analysis
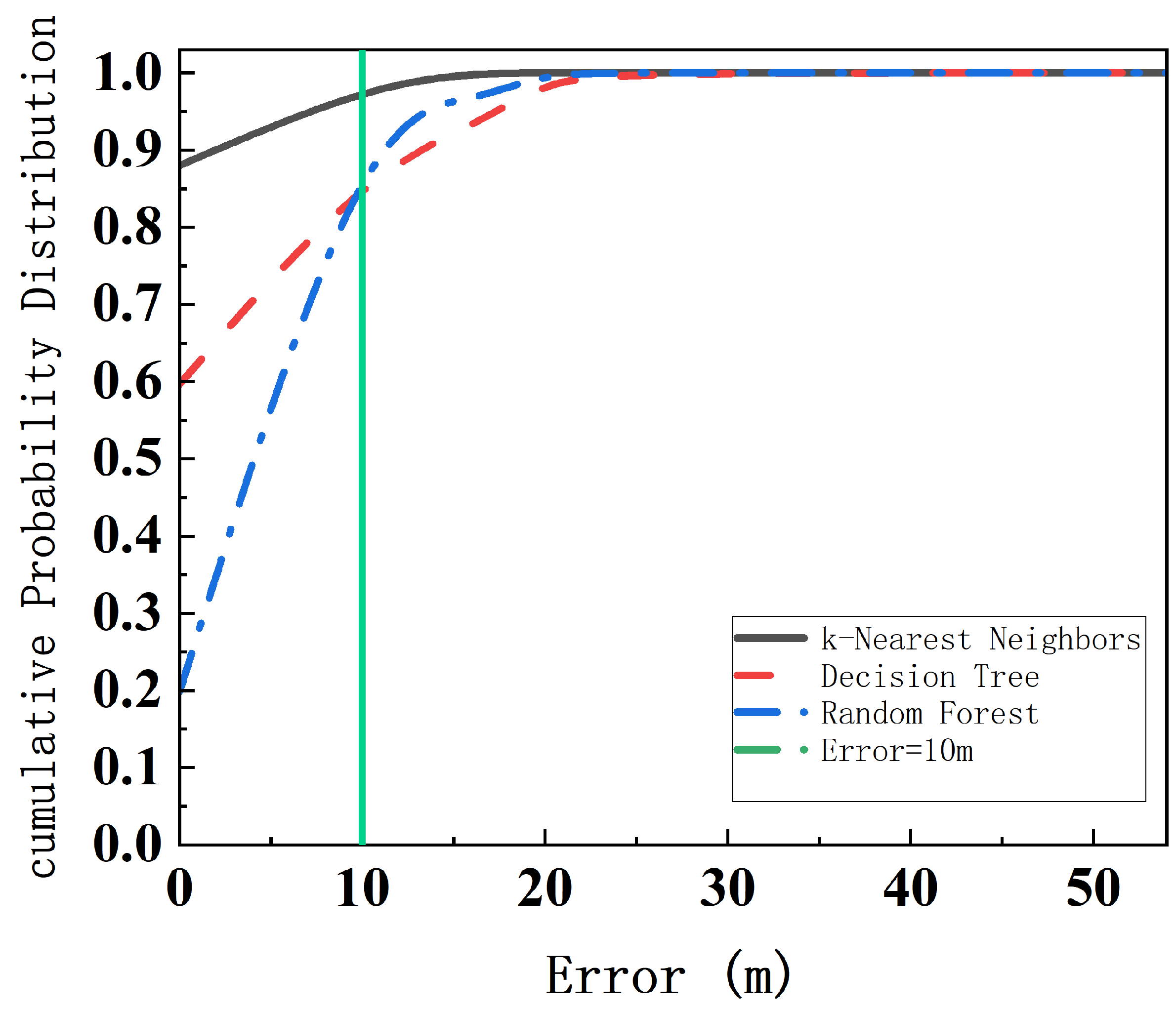
- Perception accuracy: By comparing the system’s outputs with ground-truth environmental sensing data from target devices, we evaluated localization accuracy. For the three integrated algorithms, the building prediction error rate remained below 0.5%, while the floor prediction error rate was approximately 1%. The system achieved a mean positioning error of less than 5 m, with around 95% of devices demonstrating errors within 10 m. These results confirm the high localization precision of the proposed framework under most conditions, underscoring the effectiveness of the MEC and crowdsourcing-based approach.
- Real-time capability: By uploading environmental sensing data from user devices to MEC servers, the framework enabled real-time localization and dynamic fingerprint map updates. Experimental results demonstrated that the system completes environmental sensing processes and updates fingerprint maps efficiently, providing a robust foundation for real-time tracking applications.
- Operational efficiency: Leveraging crowdsourcing for data collection significantly reduced the workload of professional surveyors while enhancing data collection efficiency. Participants seamlessly contributed environmental sensing and device metadata, enabling continuous fingerprint map construction and updates. This distributed data collection approach aligns well with the rapid development and widespread adoption of 5G networks.
6. Future Work
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 5G | fifth-generation mobile network |
| AI | artificial intelligence |
| IoT | Internet of Things |
| GPS | global positioning system |
| MEC | mobile edge computing |
| TDOA | time difference of arrival |
| AOA | angle of arrival |
| RSSI | received signal strength indicator |
| CSI | channel state information |
| MPR | modified polar representation |
| CNN | convolutional neural network |
| LSTM | long short-term memory |
| MLP | multilayer perceptron |
| UWB | ultra-wideband |
| UE | user equipment |
| CDN | content delivery network |
| BLE | Bluetooth Low Energy |
| CSS | chirp spread spectrum |
| ToA | time-of-arrival |
| KNN | k-nearest neighbors |
References
- Wen, M.; Li, Q.; Kim, K.J.; López-Pérez, D.; Dobre, O.A.; Poor, H.V.; Popovski, P.; Tsiftsis, T.A. Private 5G networks: Concepts, architectures, and research landscape. IEEE J. Sel. Top. Signal Process. 2021, 16, 7–25. [Google Scholar] [CrossRef]
- Wang, X.; Li, J.; Ning, Z.; Song, Q.; Guo, L.; Guo, S.; Obaidat, M.S. Wireless powered mobile edge computing networks: A survey. ACM Comput. Surv. 2023, 55, 1–37. [Google Scholar] [CrossRef]
- Tang, J.; Liu, G.; Pan, Q. A review on representative swarm intelligence algorithms for solving optimization problems: Applications and trends. IEEE/CAA J. Autom. Sin. 2021, 8, 1627–1643. [Google Scholar] [CrossRef]
- Kim, S.; Chong, J.W. An efficient TDOA-based localization algorithm without synchronization between base stations. Int. J. Distrib. Sens. Netw. 2015, 11, 832351. [Google Scholar] [CrossRef]
- Sun, Y.; Ho, K.; Xing, T.; Yang, Y.; Chen, L. Projection-based algorithm and performance analysis for TDOA localization in MPR. IEEE Trans. Signal Process. 2024, 72, 896–911. [Google Scholar] [CrossRef]
- Nemati, M.; Baykas, T.; Choi, J. Performance of TDOA and AOA localization techniques for different base-stations topologies. In Proceedings of the 2019 13th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, Australia, 16–18 December 2019; pp. 1–7. [Google Scholar]
- Xhafa, A.; del Peral-Rosado, J.A.; López-Salcedo, J.A.; Seco-Granados, G. Evaluation of 5G positioning performance based on UTDoA, AoA and base-station selective exclusion. Sensors 2021, 22, 101. [Google Scholar] [CrossRef]
- Dong, Y.; Lu, X.; Guo, J.; Peng, F. TDOA-MCM: A TDOA-based Multi-path Communication Mechanism for UWB Indoor Positioning. KSII Trans. Internet Inf. Syst. (TIIS) 2025, 19, 327–343. [Google Scholar]
- Lutakamale, A.S.; Myburgh, H.C.; De Freitas, A. RSSI-based fingerprint localization in LoRaWAN networks using CNNs with squeeze and excitation blocks. Ad Hoc Netw. 2024, 159, 103486. [Google Scholar] [CrossRef]
- Ding, W.; Li, L.; Chang, S. A Simple and Efficient Method for RSS-AOA-Based Localization with Heterogeneous Anchor Nodes. Sensors 2025, 25, 2028. [Google Scholar] [CrossRef]
- Karakusak, M.Z.; Kivrak, H.; Ates, H.F.; Ozdemir, M.K. RSS-based wireless LAN indoor localization and tracking using deep architectures. Big Data Cogn. Comput. 2022, 6, 84. [Google Scholar] [CrossRef]
- Zhou, R.; Yang, Y.; Chen, P. An RSS transform—Based WKNN for indoor positioning. Sensors 2021, 21, 5685. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Fu, J.; Wu, Z. A novel indoor precise positioning method based on RSS and AOA hybrid measurements. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2024; Volume 2770, p. 012027. [Google Scholar]
- Wu, Z.; Hu, P.; Liu, S.; Pang, T. Attention mechanism and LSTM network for fingerprint-based indoor location system. Sensors 2024, 24, 1398. [Google Scholar] [CrossRef] [PubMed]
- Yoon, J.H.; Kim, H.J.; Lee, D.S.; Kwon, S.K. Indoor Positioning Method by CNN-LSTM of Continuous Received Signal Strength Indicator. Electronics 2024, 13, 4518. [Google Scholar] [CrossRef]
- Li, P.; Guan, R.; Chen, B.; Xu, S.; Xiao, D.; Xu, L.; Yan, B. UWB-Assisted Bluetooth Localization Using Regression Models and Multi-Scan Processing. Sensors 2024, 24, 6492. [Google Scholar] [CrossRef]
- Bouse, L.; King, S.A.; Chu, T. Simplified indoor localization using bluetooth beacons and received signal strength fingerprinting with smartwatch. Sensors 2024, 24, 2088. [Google Scholar] [CrossRef]
- Kamal, A.; Alam, M.G.R.; Hassan, M.R.; Apon, T.S.; Hassan, M.M. Explainable indoor localization of BLE devices through RSSI using recursive continuous wavelet transformation and XGBoost classifier. Future Gener. Comput. Syst. 2023, 141, 230–242. [Google Scholar] [CrossRef]
- Milano, F.; da Rocha, H.; Laracca, M.; Ferrigno, L.; Espírito Santo, A.; Salvado, J.; Paciello, V. BLE-based indoor localization: Analysis of some solutions for performance improvement. Sensors 2024, 24, 376. [Google Scholar] [CrossRef] [PubMed]
- Ruan, L.; Zhang, L.; Zhou, T.; Long, Y. An improved Bluetooth indoor positioning method using dynamic fingerprint window. Sensors 2020, 20, 7269. [Google Scholar] [CrossRef]
- Gu, C.; Jiang, L.; Tan, R. LoRa-based localization: Opportunities and challenges. arXiv 2018, arXiv:1812.11481. [Google Scholar]
- Hirotsu, K.; Granelli, F.; Nakao, A. Lora-based localization for drones: Methodological enhancements explored through simulations and real-world experiments. IEEE Access 2024, 12, 145988–145996. [Google Scholar] [CrossRef]
- Yahya, M.S.; Soeung, S.; Rahim, S.K.A.; Geok, T.K.; Musa, U. Machine Learning-Optimized Wearable Antenna for LoRa Localization. IEEE Access 2024, 12, 139237–139252. [Google Scholar] [CrossRef]
- Islam, K.Z.; Murray, D.; Diepeveen, D.; Jones, M.G.; Sohel, F. LoRa-based outdoor localization and tracking using unsupervised symbolization. Internet Things 2024, 25, 101016. [Google Scholar] [CrossRef]
- Lin, J.; Xiong, R.; Xu, Z.; Tian, W.; Chen, C.; Dong, X.; Luo, J. Multi-node concurrent Localization in LoRa networks: Optimizing accuracy and efficiency. In Proceedings of the IEEE INFOCOM 2024-IEEE Conference on Computer Communications, Vancouver, BC, Canada, 20–23 May 2024; pp. 1091–1100. [Google Scholar]
- Lam, K.H.; Cheung, C.C.; Lee, W.C. RSSI-based LoRa localization systems for large-scale indoor and outdoor environments. IEEE Trans. Veh. Technol. 2019, 68, 11778–11791. [Google Scholar] [CrossRef]
- Chen, H.; Xing, F.; Yang, Q.; Shu, Y.; Shi, Z.; Chen, J.; Tao, Z. A lightweight mobile-anchor-based multi-target outdoor localization scheme using LoRa communication. IEEE Trans. Green Commun. Netw. 2023, 7, 1607–1619. [Google Scholar] [CrossRef]
- Liang, Y.; Chen, S.; Dong, X.; Liu, T. Fine-grained grid computing model for Wi-Fi indoor localization in complex environments. J. Electron. Sci. Technol. 2024, 22, 100234. [Google Scholar] [CrossRef]
- Kim, J.H.; Min, K.S.; Yeo, W.Y. A Design of Irregular Grid Map for Large-Scale Wi-Fi LAN Fingerprint Positioning Systems. Sci. World J. 2014, 2014, 203419. [Google Scholar] [CrossRef] [PubMed]
- Zhang, A.; Yuan, Y.; Wu, Q.; Zhu, S.; Deng, J. Wireless localization based on RSSI fingerprint feature vector. Int. J. Distrib. Sens. Networks 2015, 11, 528747. [Google Scholar] [CrossRef]
- Altaf Khattak, S.B.; Fawad; Nasralla, M.M.; Esmail, M.A.; Mostafa, H.; Jia, M. WLAN RSS-based fingerprinting for indoor localization: A machine learning inspired bag-of-features approach. Sensors 2022, 22, 5236. [Google Scholar] [CrossRef]
- Mao, Y.; You, C.; Zhang, J.; Huang, K.; Letaief, K.B. A survey on mobile edge computing: The communication perspective. IEEE Commun. Surv. Tutorials 2017, 19, 2322–2358. [Google Scholar] [CrossRef]
- Wang, X.; Dao, F.; Ji, Y.; Qiu, S.; Zhu, X.; Dong, W.; Wang, H.; Zhang, W.; Zheng, X. Crowdsourcing intelligence for improving disaster forecasts. Innovation 2024, 5, 100647. [Google Scholar] [CrossRef]
- Lymberopoulos, D.; Liu, J.; Yang, X.; Choudhury, R.R.; Sen, S.; Handziski, V. Microsoft indoor localization competition: Experiences and lessons learned. GetMobile: Mob. Comput. Commun. 2015, 18, 24–31. [Google Scholar] [CrossRef]
- Van Haute, T.; De Poorter, E.; Lemic, F.; Handziski, V.; Wirström, N.; Voigt, T.; Wolisz, A.; Moerman, I. Platform for benchmarking of RF-based indoor localization solutions. IEEE Commun. Mag. 2015, 53, 126–133. [Google Scholar] [CrossRef]
- Standard ISO/IEC 18305:2016; Information Technology—Real-Time Locating Systems—Test and Evaluation of Indoor Locating Systems Used in Personal Applications. International Organization for Standardization (ISO): Geneva, Switzerland, 2016. Available online: https://www.iso.org/standard/62080.html (accessed on 5 April 2025).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Reference | Contribution |
|---|---|---|
| Base station-assisted signal ranging | ||
| Multi-path aided TDOA | Dong et al., 2025 [8] | Multi-path aided TDOA localization addressing synchronization challenges. |
| TDOA optimization | Sun et al., 2024 [5] | Unified near- and far-field TDOA processing based on modified polar representation (MPR). |
| Hybrid TDOA+AOA in 5G | Xhafa et al., 2021 [7] | UTDoA and AOA fusion with base station selective exclusion in 5G networks. |
| Topology impact analysis | Nemati et al., 2019 [6] | Analysis of base station topology impact on TDOA and AOA performance. |
| TDOA optimization | Kim et al., 2015 [4] | TDOA without strict synchronization via mobile source movement. |
| Bluetooth-assisted signal ranging | ||
| Learning enhancement | Wu et al., 2024 [14] | Attention-enhanced BLE fingerprinting for improved feature extraction. |
| Hybrid fingerprinting | Yoon et al., 2024 [15] | Hybrid BLE fingerprinting adapting to dynamic environments. |
| Signal fusion | Li et al., 2024 [16] | BLE and UWB signal fusion for robust localization. |
| Lightweight deployment | Bouse/Gollner et al., 2024 [17] | Lightweight BLE smartwatch-based room-level tracking. |
| System optimization | Milano et al., 2024 [19] | BLE signal filtering and anchor placement optimization. |
| Explainable models | Kamal/Rodríguez et al., 2023 [18] | Explainable BLE localization using SHAP-based interpretation. |
| Dynamic fingerprinting | Ruan et al., 2020 [20] | Dynamic fingerprint window (DFW-WKNN) for adaptive BLE fingerprint matching. |
| LoRa-assisted Signal Ranging | ||
| Altitude-aided localization | Hirotsu et al., 2024 [22] | Drone LoRa localization using altitude fusion and Huber loss. |
| Wearable hardware optimization | Yahya et al., 2024 [23] | ML-optimized wearable antenna for improved LoRa tracking. |
| Unsupervised learning | Islam et al., 2024 [24] | Unsupervised symbolization for dynamic LoRa localization. |
| Drift correction | Lin et al., 2024 [25] | SyncLoc framework correcting gateway drift in multi-node LoRa networks. |
| Energy-efficient outdoor localization | Chen et al., 2023 [27] | Mobile-anchor-based multi-target outdoor LoRa localization with path optimization. |
| Noise robustness | Lam et al., 2019 [26] | RSSI noise mitigation for robust large-scale LoRa positioning. |
| Physical challenge analysis | Gu et al., 2018 [21] | Analysis of challenges in RSSI, TDOA, and TOA for LoRa localization. |
| Environment perception fingerprint collection | ||
| Fine-grained Grid Model | Wang et al., 2024 [28] | Fine-grained grid model with machine learning for indoor localization. |
| Bag-of-features ML approach | Khattak et al., 2022 [31] | Machine learning Bag-of-features approach for WLAN fingerprinting. |
| Uniform grid + RSSI matching | Zhang et al., 2015 [30] | Uniform grid-based RSSI fingerprinting achieving 2–4 m accuracy. |
| Irregular grid layout | Kim et al., 2014 [29] | Irregular grid map design to optimize coverage and reduce errors. |
| Column Index | Feature Meaning | Standard Deviation |
|---|---|---|
| 0–520 | Strength values for WAP001–WAP520. | Avg STD: 23.96 |
| 521 | Longitude | – |
| 522 | Latitude | – |
| 523 | Floor heights within the building. | – |
| 524 | ID used to identify the building. Measurements were taken in three different buildings. | – |
| 525 | Internal ID numbers used to identify spaces (offices, corridors, classrooms) | – |
| 526 | Location relative to space (1—inside, 2—outside in front of the door) | – |
| 527 | User ID | – |
| 528 | Android device identifier (phone ID) | – |
| 529 | UNIX time at the time of capture | – |
| Index | k-Nearest Neighbors | Decision Tree | Random Forest |
|---|---|---|---|
| Building error rate | 0.21% | 0.42% | 0.29% |
| Floor error rate | 0.24% | 3.46% | 0.55% |
| Average distance error | 1.28 m | 4.57 m | 4.08 m |
| Probability (distance error < 10 m) | 97.30% | 87.04% | 92.57% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, R.; Shi, L.; Liu, Y.; Dang, Z. A Novel Crowdsourcing-Assisted 5G Wireless Signal Ranging Technique in MEC Architecture. Future Internet 2025, 17, 220. https://doi.org/10.3390/fi17050220
Lu R, Shi L, Liu Y, Dang Z. A Novel Crowdsourcing-Assisted 5G Wireless Signal Ranging Technique in MEC Architecture. Future Internet. 2025; 17(5):220. https://doi.org/10.3390/fi17050220
Chicago/Turabian StyleLu, Rui, Lei Shi, Yinlong Liu, and Zhongkai Dang. 2025. "A Novel Crowdsourcing-Assisted 5G Wireless Signal Ranging Technique in MEC Architecture" Future Internet 17, no. 5: 220. https://doi.org/10.3390/fi17050220
APA StyleLu, R., Shi, L., Liu, Y., & Dang, Z. (2025). A Novel Crowdsourcing-Assisted 5G Wireless Signal Ranging Technique in MEC Architecture. Future Internet, 17(5), 220. https://doi.org/10.3390/fi17050220