
Resolving Persistent Packet Collisions through Broadcast Feedback in Cellular V2X Communication †


Abstract
:1. Introduction
- Resolve the persistent packet collision problem in sensing-based semi-persistent scheduling for Sidelink Mode 2 in NR V2X communication, so that any consecutive collisions are short-lived and preferably within two packets;
- Resolve the persistent packet collision problem without sacrificing other performance metrics. In particular, maintain the same level of packet reception ratio (PRR) as in the unmodified SPS;
- Construct the solution as an opportunistic QoS enhancer for the standard SPS algorithm within the confines of the standard framework.
2. Related Work
2.1. Avoiding Persistent Packet Collisions
2.2. Using Broadcast Feedback
- It resolves packet collisions in, at most, two collisions by executing the resource reselection, preventing further collisions;
- It can be implemented in the current standard framework. It can use the reserved bits in the SCI in LTE V2X or newly available resource reservation pointers in NR V2X;
- It works with little bandwidth overhead, so it is usable even under high channel utilization conditions;
- It does not rely on a particular feedback provider, so it is more reliable;
- Below, the proposed scheme is discussed in detail.
3. Broadcast Feedback on Packet Collisions
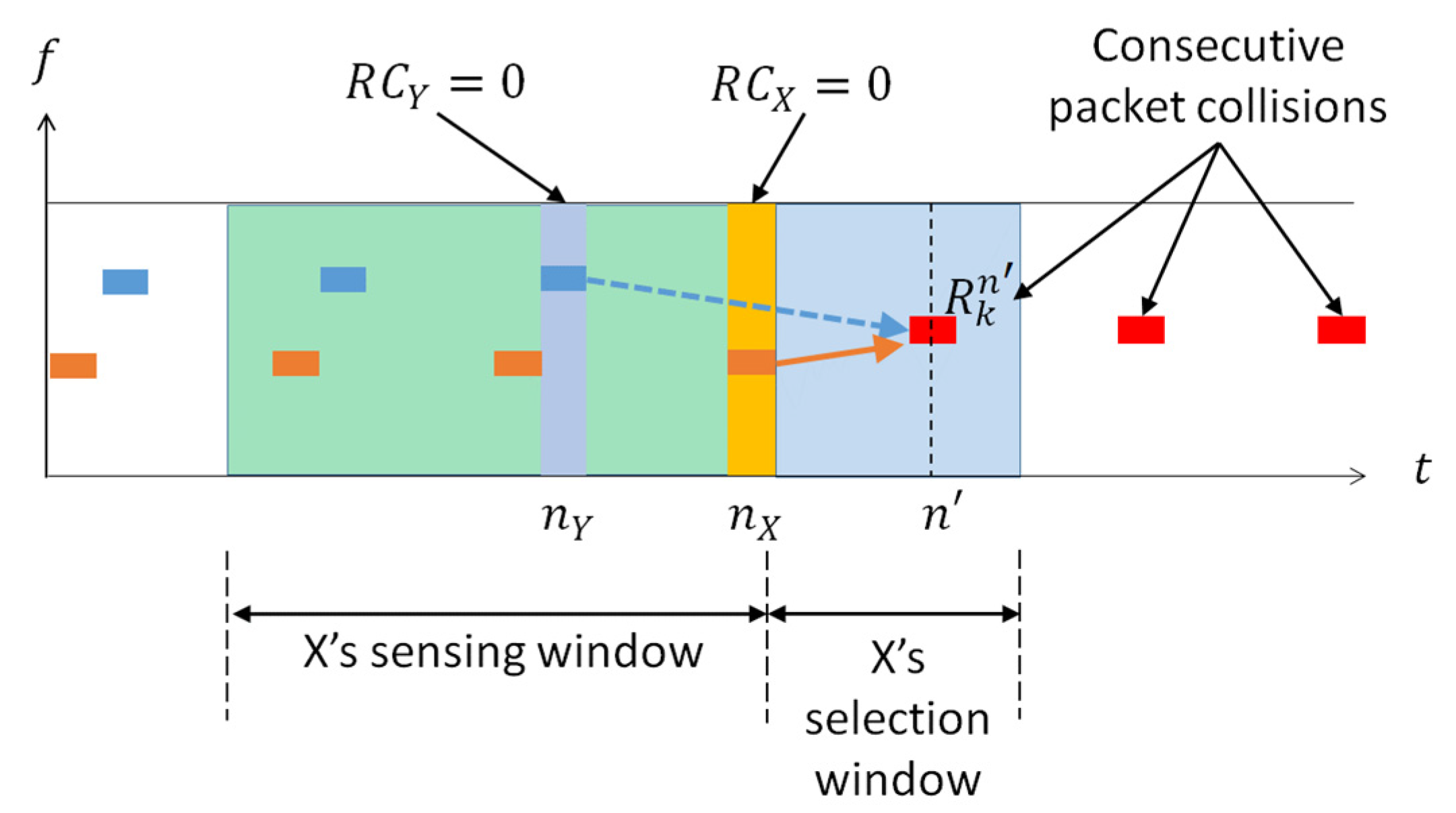
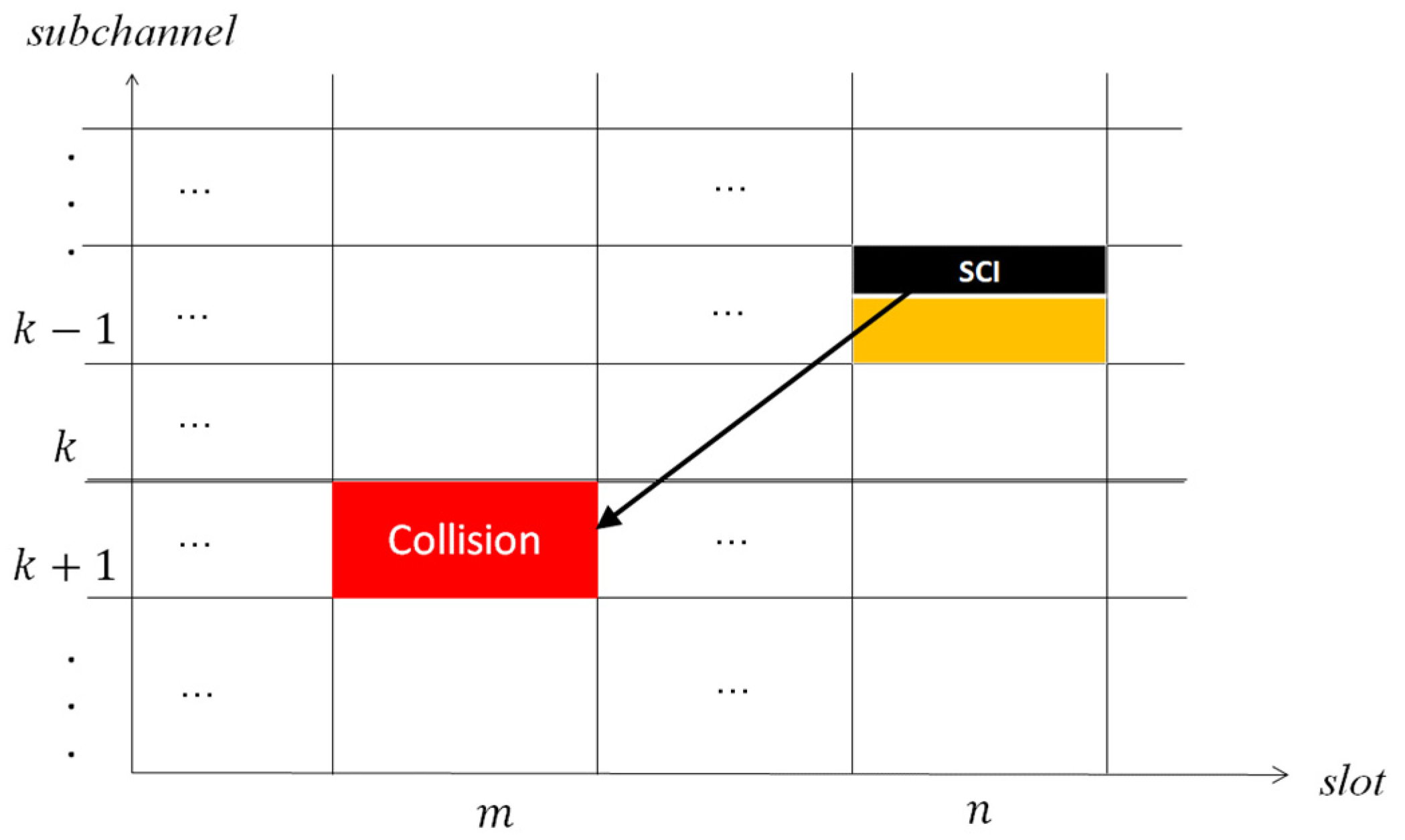
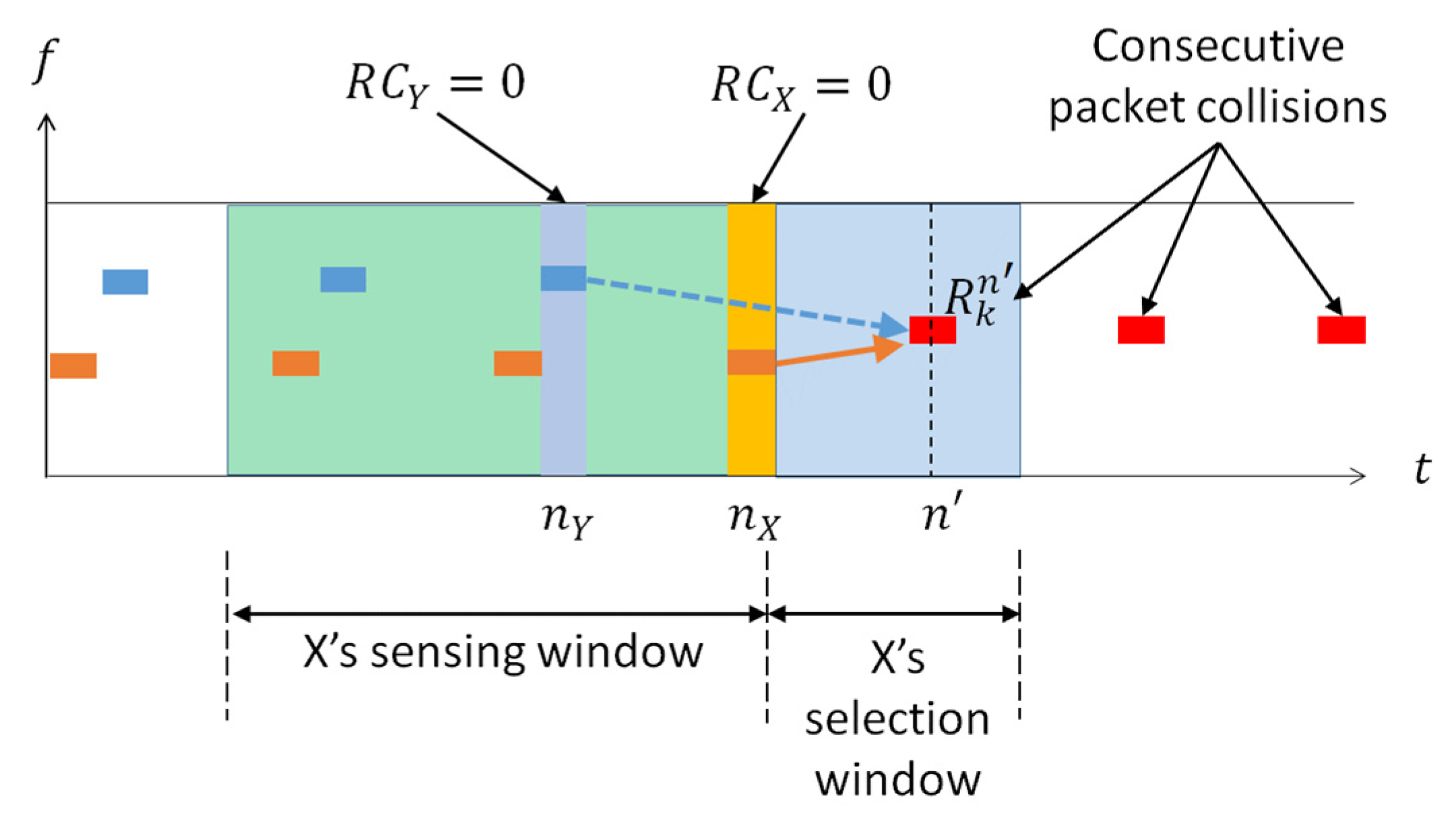
3.1. Problem of Resource Collision in SPS
- Accurate identifying conditions of a packet collision within the ROI;
- Reliable method of selecting adequate feedback provider(s) among collision-witnessing vehicles;
- Mechanism to convey the packet collision notification;
- Procedure that the feedback receiver should follow.
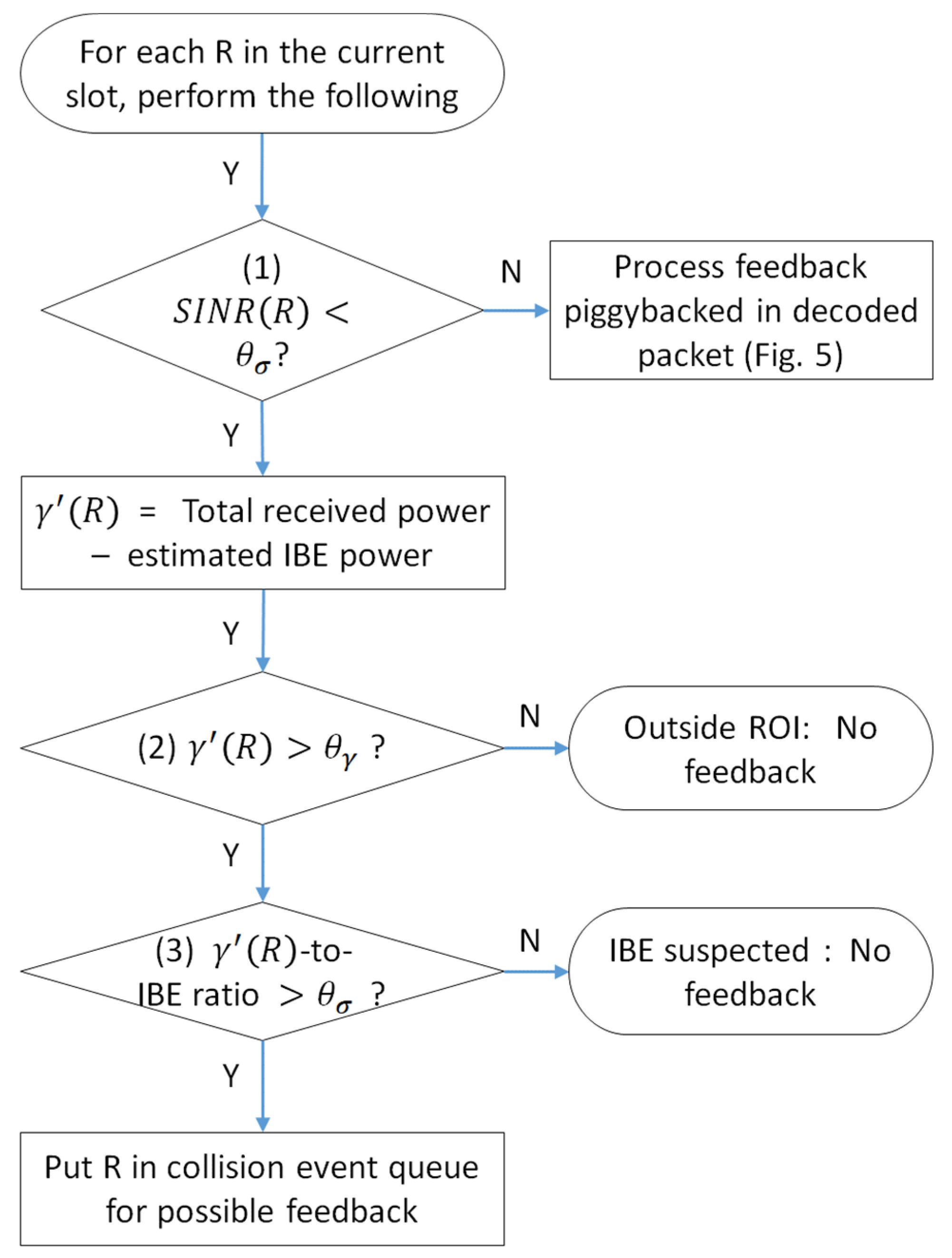
3.2. Packet Collision Sensing
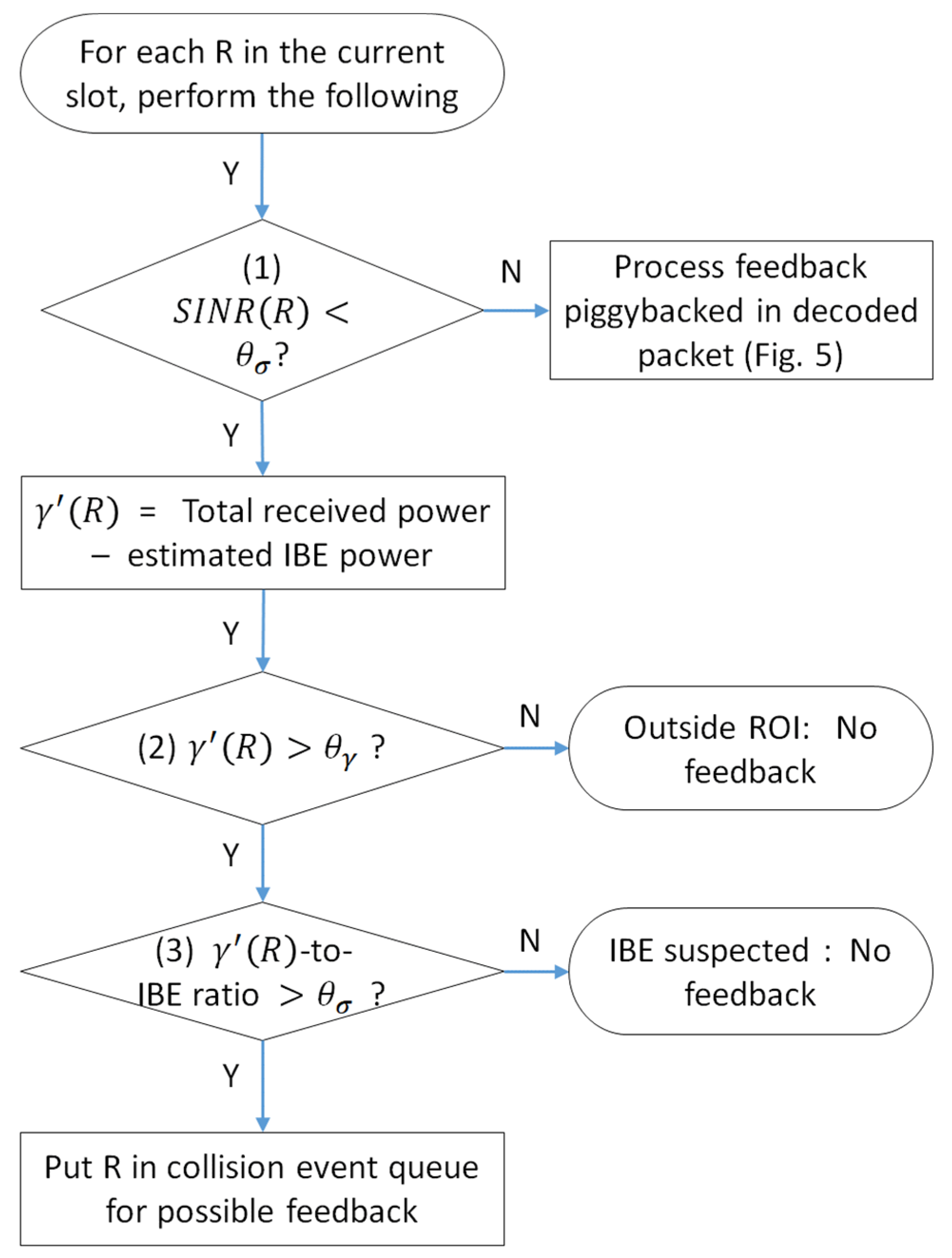
3.2.1. Feedback Provider Qualification Based on Signal-to-Interference-and-Noise Ratio
3.2.2. Feedback Provider Qualification Based on Received Signal Strength Indicator
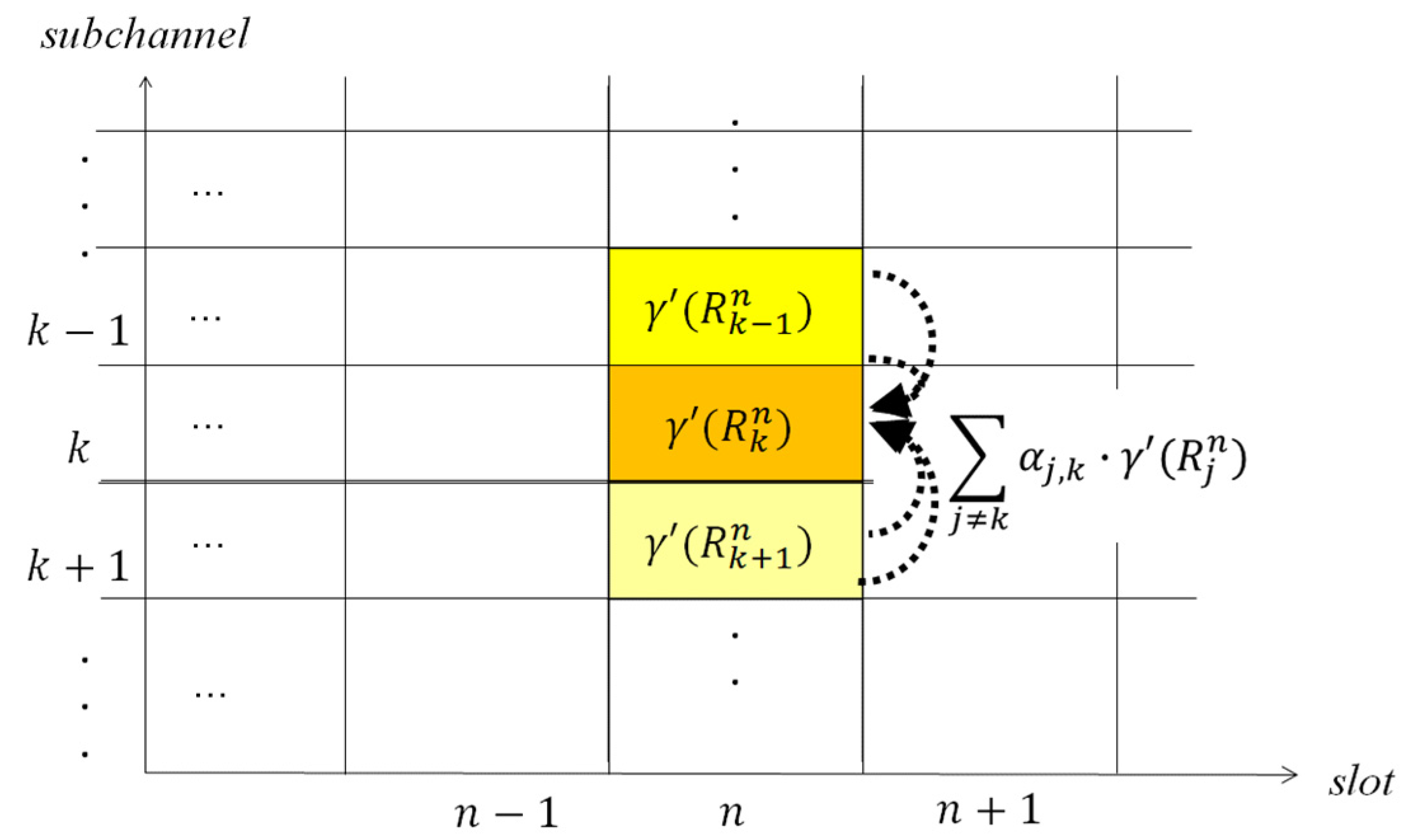
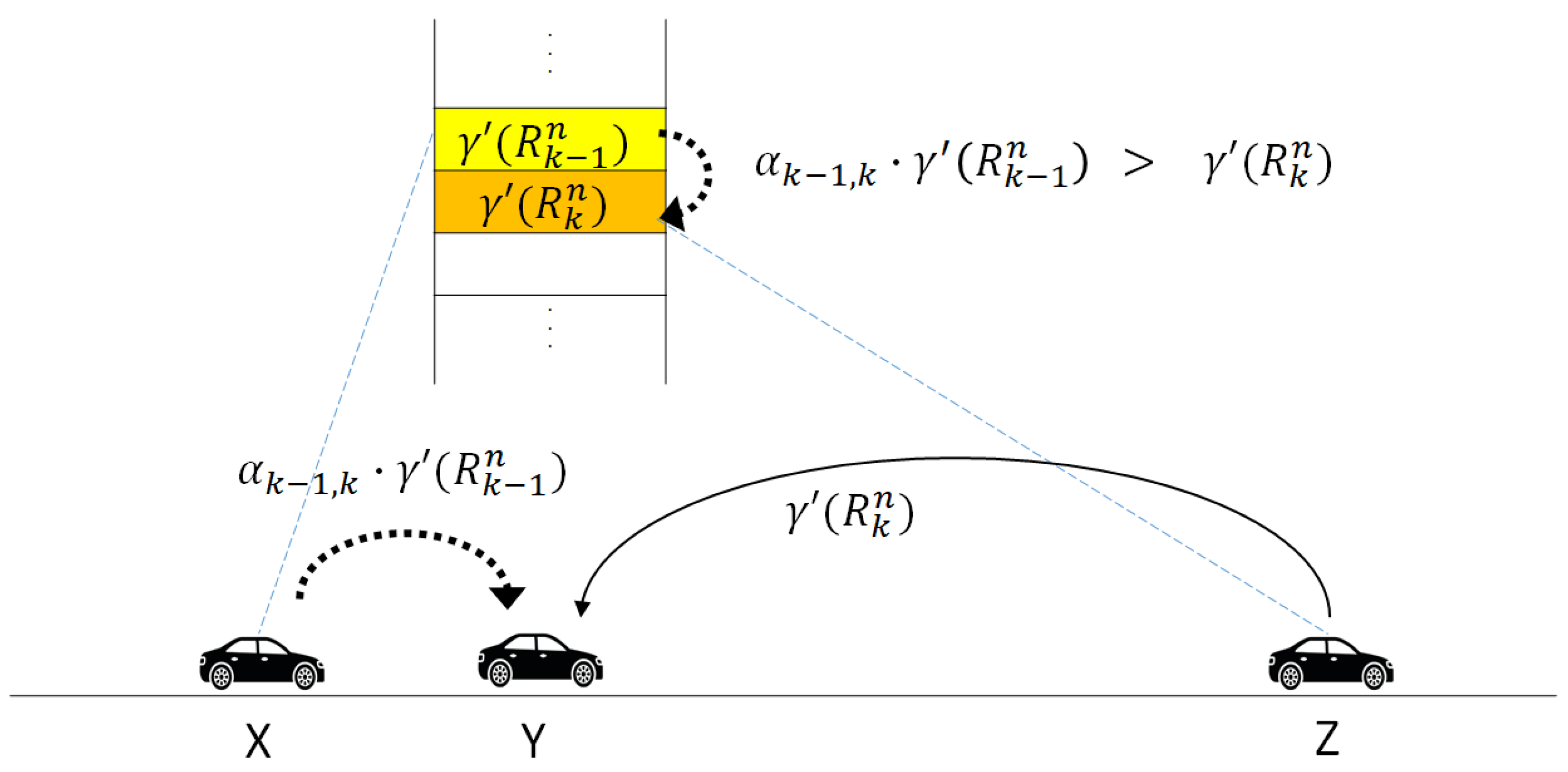
3.2.3. Feedback Provider Qualification Based on In-Band Emission
| Algorithm 1. Feedback provider qualifier (FPQ) |
| 1: procedure FPQ(n, Nsubch, α, Q)
2: n: current slot 3: Nsubch: no. of subchannels 4: α: IBE weight factor 5: Q: feedback queue 6: 7: for k = 1; k < Nsubch; k = k + 1 do 8: 9: 10: then 11: // condition(1): decoded − no feedback 12: 13: then 14: out 15: then 16: // condition (4): outside ROI − no feedback 17: then 18: // condition (5): IBE suspected – no feedback 19: else 20: enqueue(<k,n>, Q) // add the location to feedback queue |
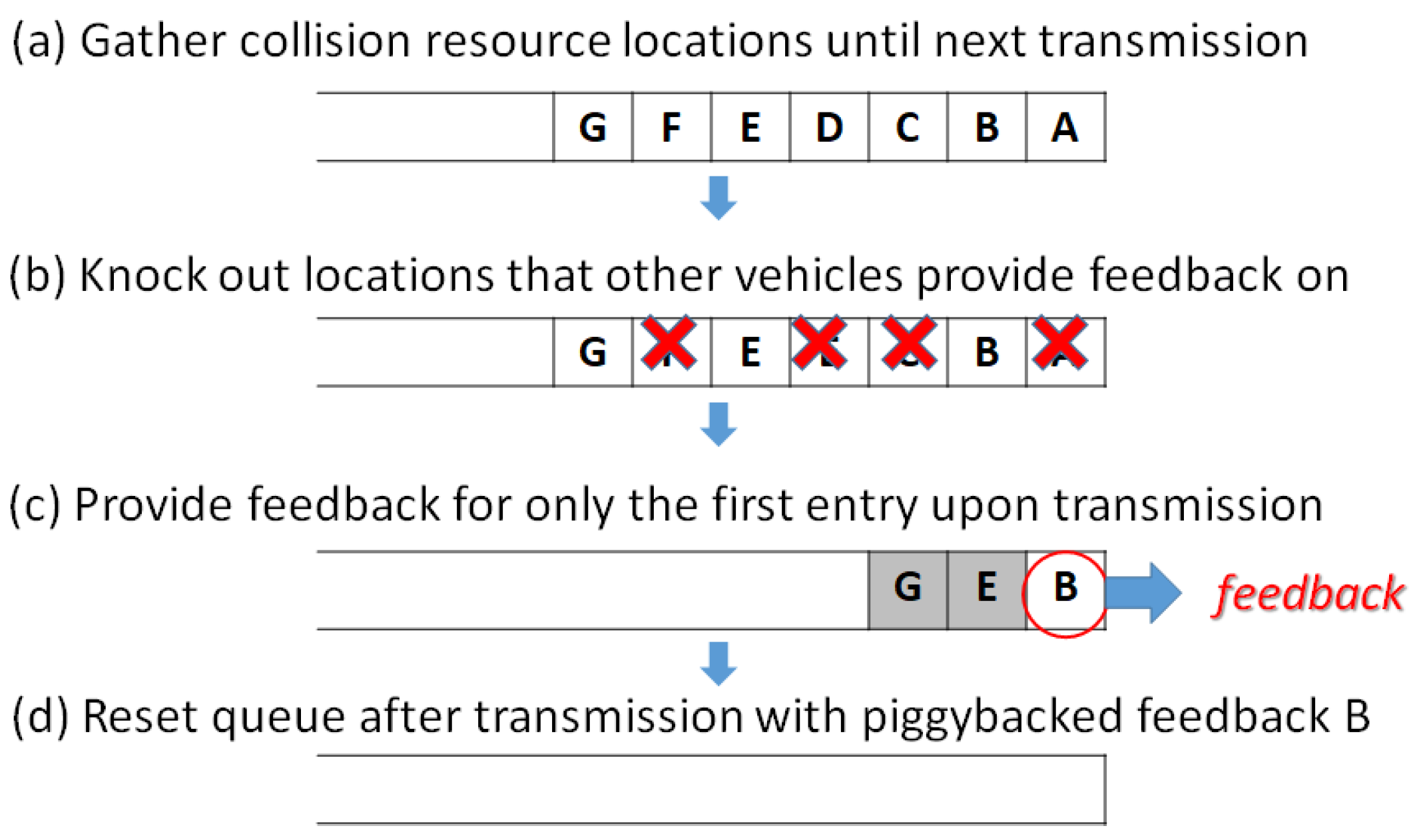
3.3. Feedback Operation
3.3.1. Feedback Provider Side
| Algorithm 2. Feedback queue management (FQM) |
| 1: procedure FQM()
2: n: current slot 3: Q: feedback queue 4: 5: if n is the slot to transmit in then 6: dequeue(Q) // feedback only the first one 7: in the packet to transmit 8: flush(Q) |
3.3.2. Feedback Consumer Side
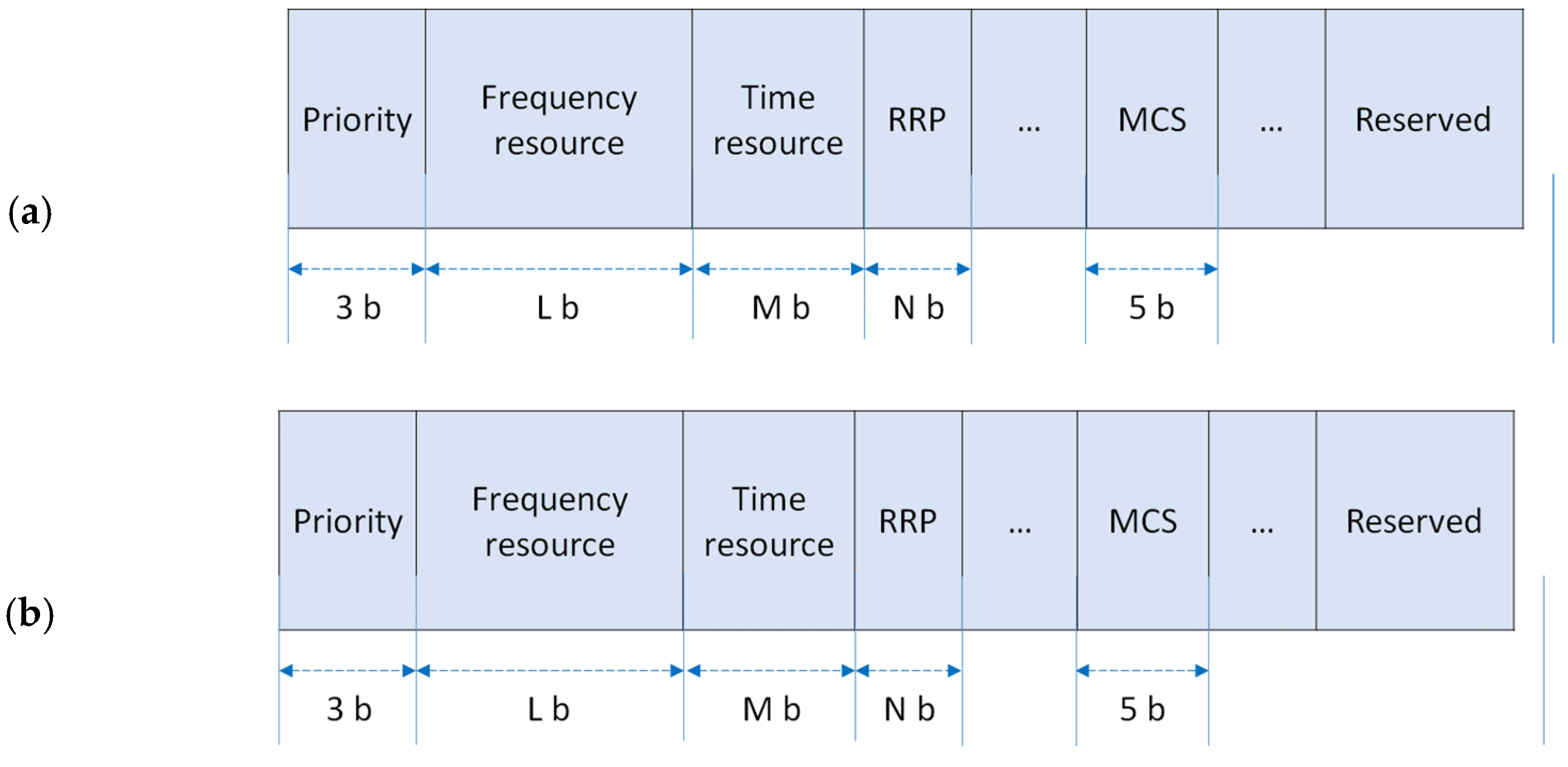
3.4. Feedback Implementation
4. Consecutive Error Prevention Performance: Evaluation
4.1. Experiment Assumptions
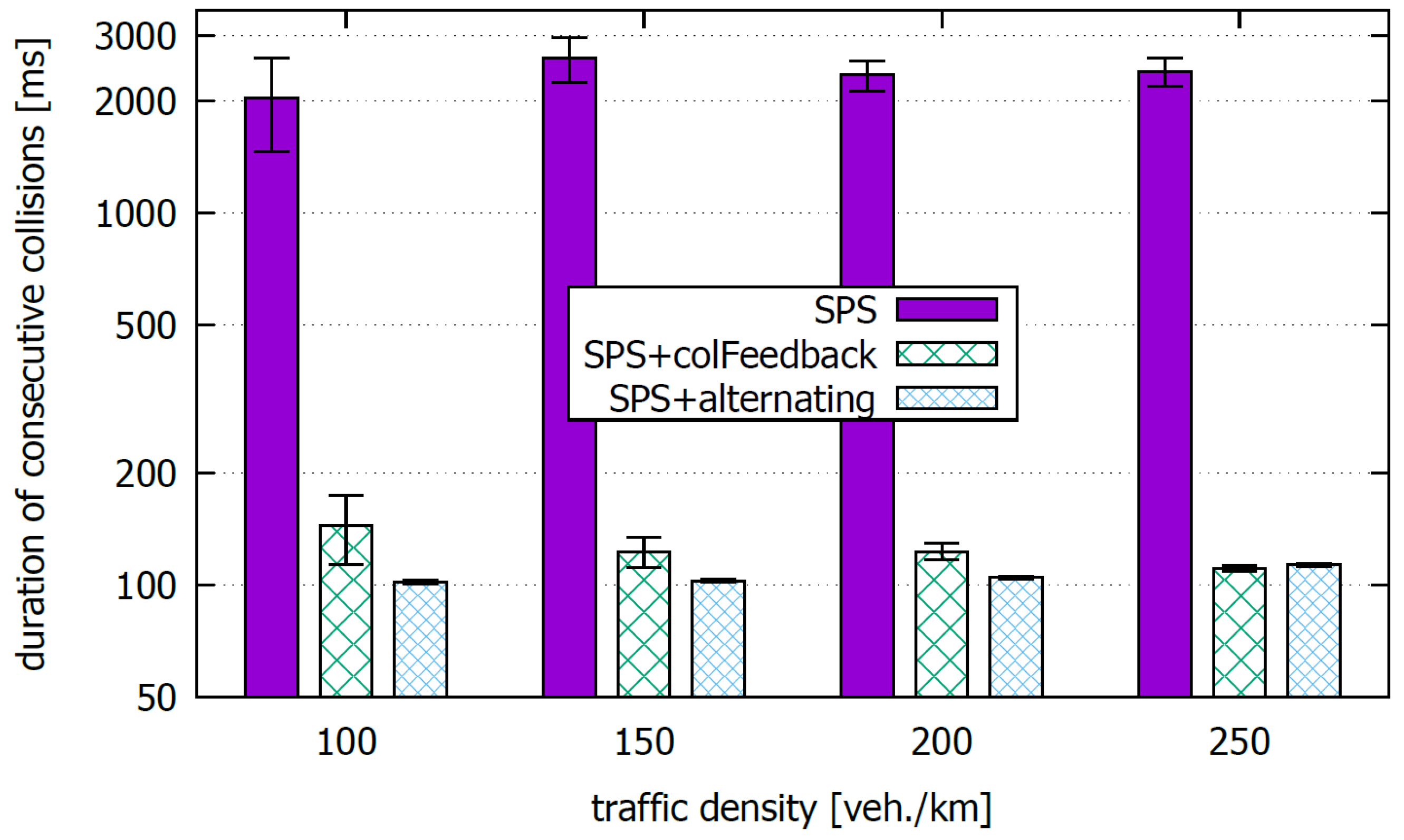
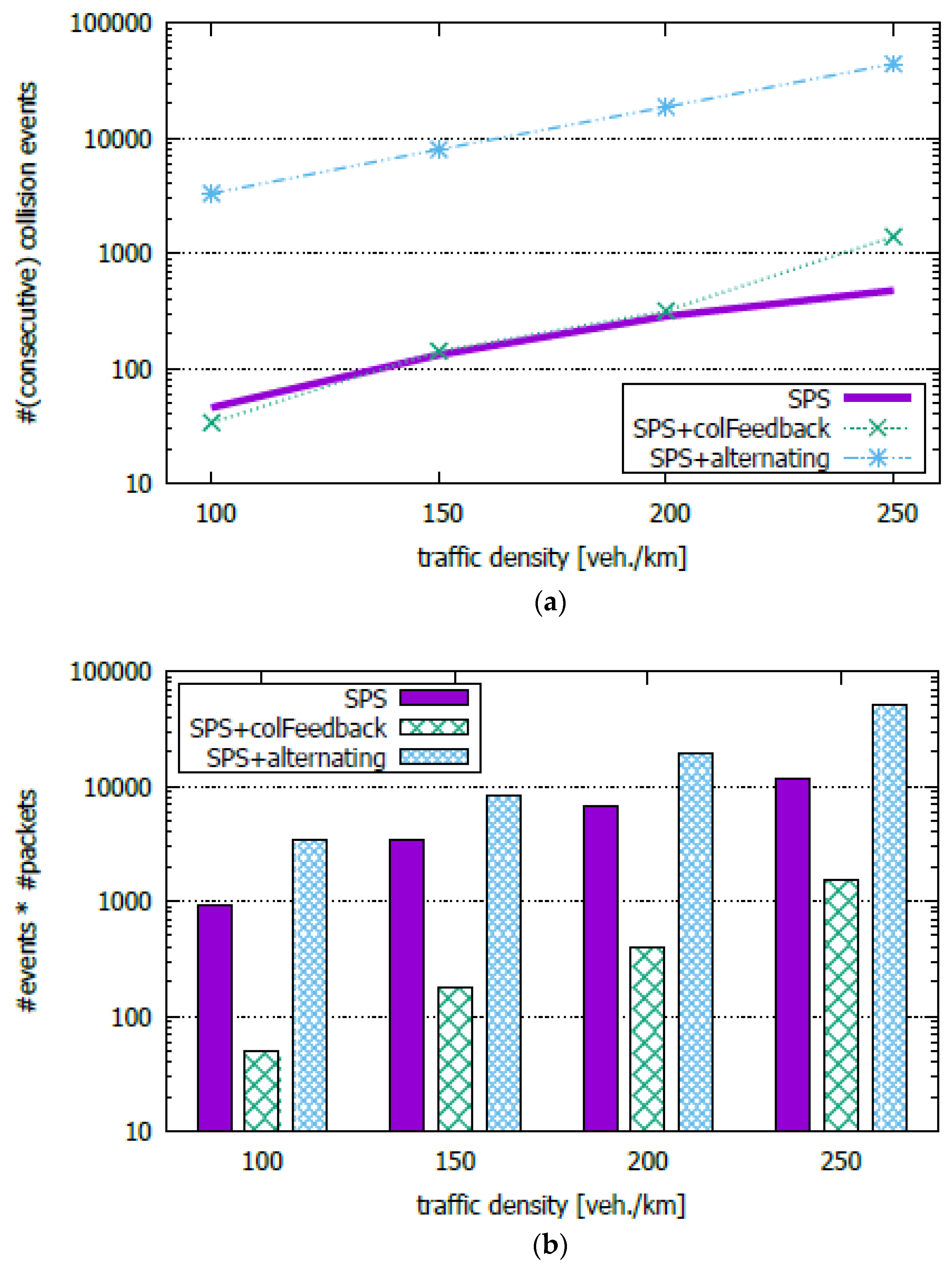
4.2. Duration of Consecutive Collisions
4.3. Number of Packet Collisions
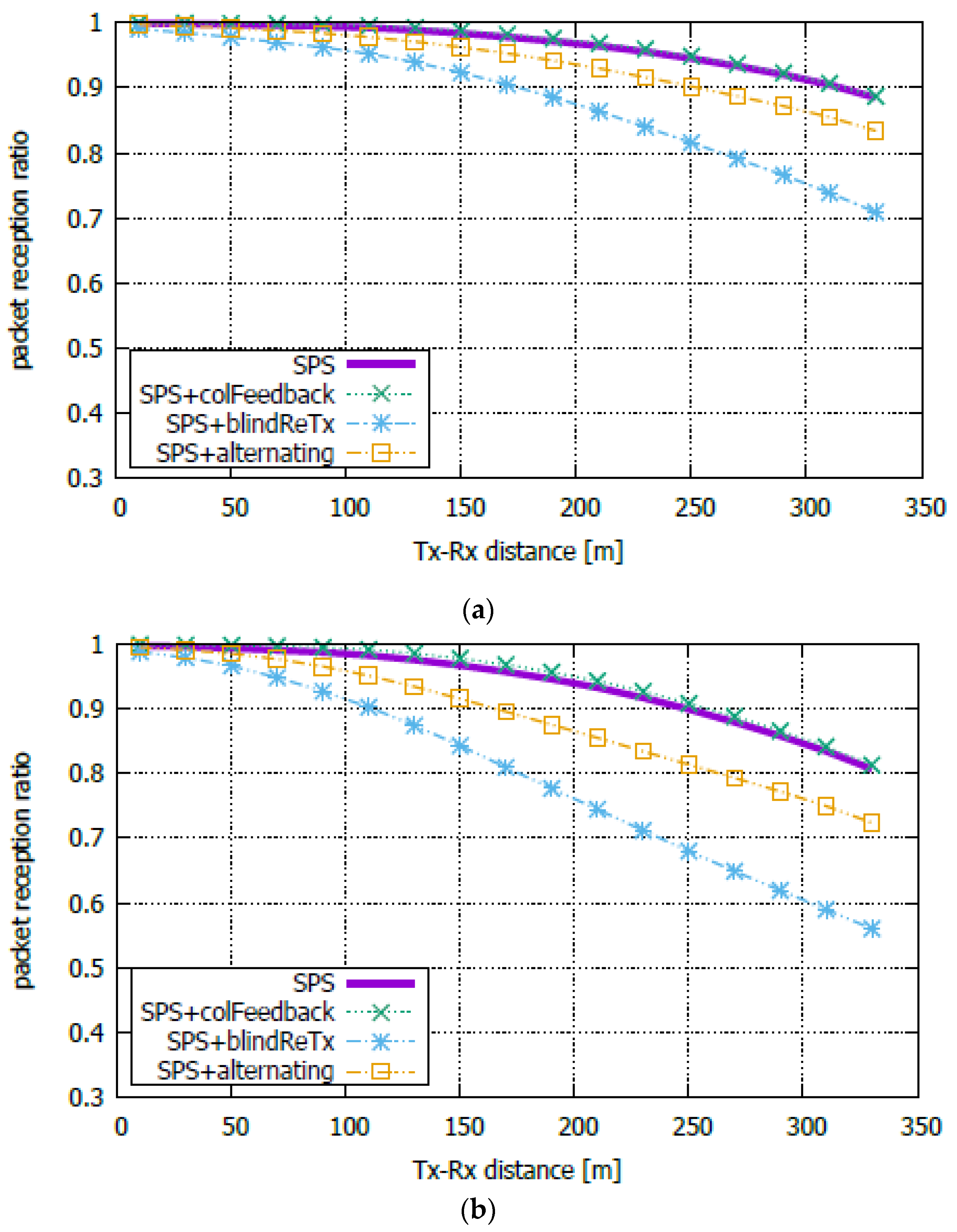
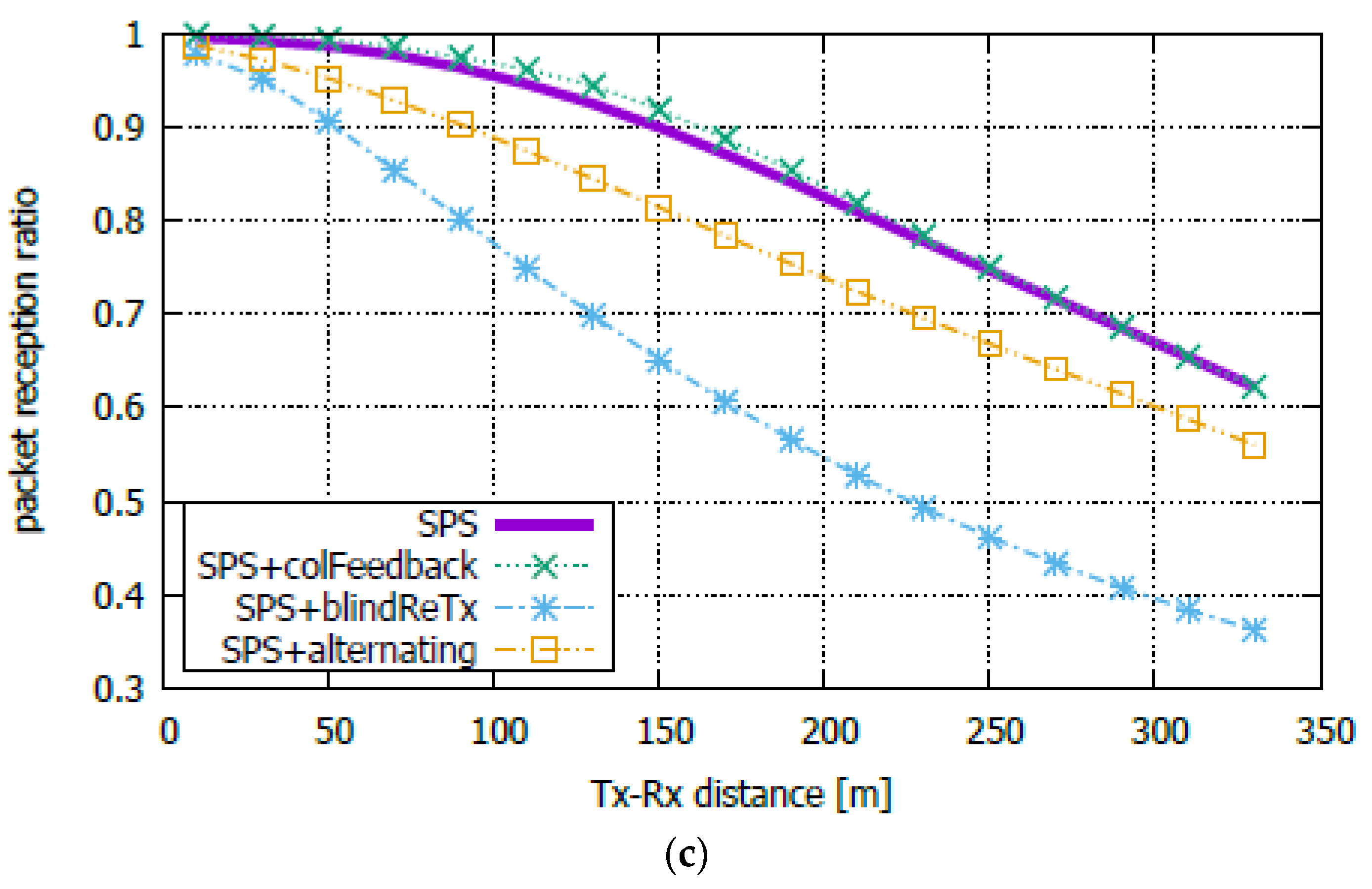
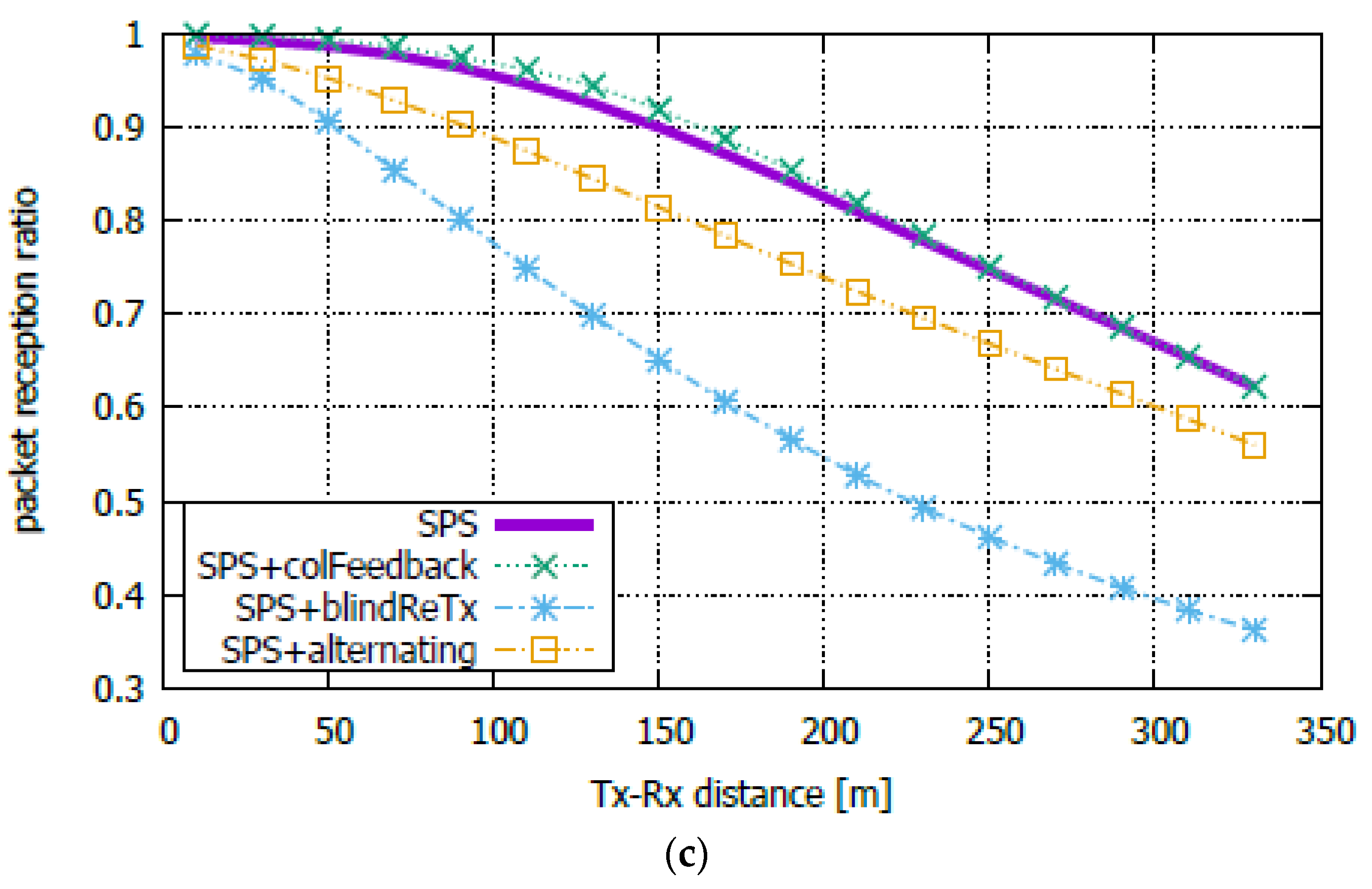
4.4. Packet Reception Ratio
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network; NR; NR and NG-RAN Overall Description; Stage 2 (Release 16); 3GPP TS 38.300; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network; NR; Physical Layer Procedures for Data (Release 16); 3GPP TS 38.214; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network; NR; Medium Access Control (MAC) Protocol Specification (Release 16); 3GPP TS 38.321; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- Dedicated Short Range Communications (DSRC) Message Set Dictionary; SAE J2735; SAG: Warrendale, PA, USA, 2016.
- Bazzi, A.; Campolo, C.; Molinaro, A.; Berthet, A.O.; Masini, B.M.; Zanella, A. On Wireless Blind Spots in the C-V2X Sidelink. IEEE Trans. Veh. Technol. 2020, 69, 9239–9243. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network; NR; Multiplexing and Channel Coding (Release 16); 3GPP TS 38.212; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- 3rd Generation Partnership Project. NR; Radio Resource Control (RRC); Protocol Specification (Release 16); 3GPP TS 38.331; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- Molina-Masegosa, R.; Gozalvez, J.; Sepulcre, M. Comparison of IEEE 802.11p and LTE-V2X: An evaluation with periodic and aperiodic messages of constant and variable size. IEEE Access 2020, 8, 121526–121548. [Google Scholar] [CrossRef]
- Jung, S.; Cheon, H.; Kim, J. Reducing Consecutive Collisions in Sensing Based Semi Persistent Scheduling for Cellular-V2X. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019. [Google Scholar]
- Jeon, Y.; Kim, H. An explicit reservation-augmented resource allocation scheme for C-V2X sidelink mode 4. IEEE Access 2020, 8, 147241–147255. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Layer Procedures (v14.3.0, Release 14); 3GPP TR 36.213; ETSI: Sophia Antipolis, France, 2017. [Google Scholar]
- Wendlend, P.; Schaefer, G. Feedback-Based Hidden-Terminal Mitigation for Distributed Scheduling in C-V2X. In Proceedings of the 2020 IFIP Networking Conference (Networking), Paris, France, 22–26 June 2020. [Google Scholar]
- ETSI. Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service, ETSI EN 302 637-2 V1.3.1; ETSI: Sophia Antipolis, France, 2014. [Google Scholar]
- Yoon, Y.; Kim, H. An Evasive Scheduling Enhancement Against Packet Dropping Attacks in C-V2X Communications. IEEE Comm. Lett. 2021, 25, 392–396. [Google Scholar] [CrossRef]
- Yoon, Y.; Kang, J.; Kim, H. Persistent Scheduling with Broadcast Feedback for Cellular V2X Communication. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021. [Google Scholar] [CrossRef]
- 5G Americas. Cellular V2X Communications towards 5G. March 2018. Available online: http://www.5gamericas.org/wp-content/uploads/2019/07/2018_5G_Americas_White_Paper_Cellular_V2X_Communications_Towards_5G__Final_for_Distribution.pdf (accessed on 13 August 2021).
- Bazzi, A.; Zanella, A.; Masini, B.M. Optimizing the resource allocation of periodic message with different sizes in LTE-V2V. IEEE Access 2019, 7, 43820–43830. [Google Scholar] [CrossRef]
- Bazzi, A.; Cecchini, G.; Menarini, M.; Masini, B.M.; Zanella, A. Survey and perspectives of vehicular Wi-Fi versus sidelink cellular-V2X in the 5G era. Future Internet 2019, 11, 122. [Google Scholar] [CrossRef] [Green Version]
- Cecchini, G.; Bazzi, A.; Masini, B.M.; Zanella, A. LTEV2Vsim: An LTE-V2V Simulator for the Investigation of Resource Allocation for Cooperative Awareness. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. Enhancement of 3GPP Support for V2X Scenarios; Stage 1 (Release 16); 3GPP TS 22.186; ETSI: Sophia Antipolis, France, 2019. [Google Scholar]
- Intel Corporation. Design of Resource Allocation Mode-2 for NR V2X Sidelink Communication. 3GPP TSG RAN WG1 Meeting 99, R1-1912205; ETSI: Sophia Antipolis, France, 2019. [Google Scholar]
- 3rd Generation Partnership Project. Evolved Universal Terrestrial Radio Access (E-UTRA); Multiplexing and Channel Coding (v.15.3.0, Release 15); 3GPP TS 36.212; ETSI: Sophia Antipolis, France, 2018. [Google Scholar]
- 3rd Generation Partnership Project. Study on LTE-Based V2X Services (v14.0.0, Release 14); 3GPP TR 36.885; ETSI: Sophia Antipolis, France, 2016. [Google Scholar]
- Hsu, C.-J.; Fikentscher, J.; Kreeb, R. Development of potential methods for testing congestion control algorithm implemented in vehicle-to-vehicle communications. Traffic Inj. Prev. 2017, 18, 51–57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Molina-Masegosa, R.; Sepulcre, M.; Gozalvez, J. Geo-based scheduling for C-V2X networks. IEEE Trans. Veh. Technol. 2019, 68, 8397–8407. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ρ | CBR (SPS) | CBR (SPS + Blind ReTx) |
|---|---|---|
| 100 | 45.94% | 69.45% |
| 150 200 250 | 62.85% 74.44% 83.03% | 84.30% 92.68% 96.45% |
| Parameter | Default Value | |
|---|---|---|
| PHY | Channel model Channel bandwidth MCS level No. of subchannels Transmit power IBE ratio (α) | Winner+ B1 10 MHz 7 2 23 dBm 0.0035 |
| Application | BSM size BSM rate | 300 bytes 10 Hz |
| SPS | Sensing window size Selection window size Resource reselection counter Resource keep prob. (Pk) Initial RSRP threshold | 1 s 100 ms [5:15] 0.8 −110 dBm |
| Road | Road topology Road length Vehicle density Vehicle distribution | Highway, straight 3 km [100:250] veh./km 1-D Poisson point process |
| Feedback algorithm | RSSI threshold SINR threshold | −85.2 dBm 7.3 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoon, Y.; Kim, H. Resolving Persistent Packet Collisions through Broadcast Feedback in Cellular V2X Communication. Future Internet 2021, 13, 211. https://doi.org/10.3390/fi13080211
Yoon Y, Kim H. Resolving Persistent Packet Collisions through Broadcast Feedback in Cellular V2X Communication. Future Internet. 2021; 13(8):211. https://doi.org/10.3390/fi13080211
Chicago/Turabian StyleYoon, Youngjoon, and Hyogon Kim. 2021. "Resolving Persistent Packet Collisions through Broadcast Feedback in Cellular V2X Communication" Future Internet 13, no. 8: 211. https://doi.org/10.3390/fi13080211
APA StyleYoon, Y., & Kim, H. (2021). Resolving Persistent Packet Collisions through Broadcast Feedback in Cellular V2X Communication. Future Internet, 13(8), 211. https://doi.org/10.3390/fi13080211