Multi-Topology Routing Algorithms in SDN-Based Space Information Networks


Abstract
1. Introduction
- (1)
- The SIN management architecture based on SDN is established, which realizes the unified management of spatial resources and provides sufficient storage and computing space for the routing algorithm of the SIN based on snapshot sequence.
- (2)
- On this basis, according to different space tasks’ QoS requirements, a method of calculating integrated link weights of the SIN is designed, so that space tasks with different QoS requirements can get their optimal routing strategy.
- (3)
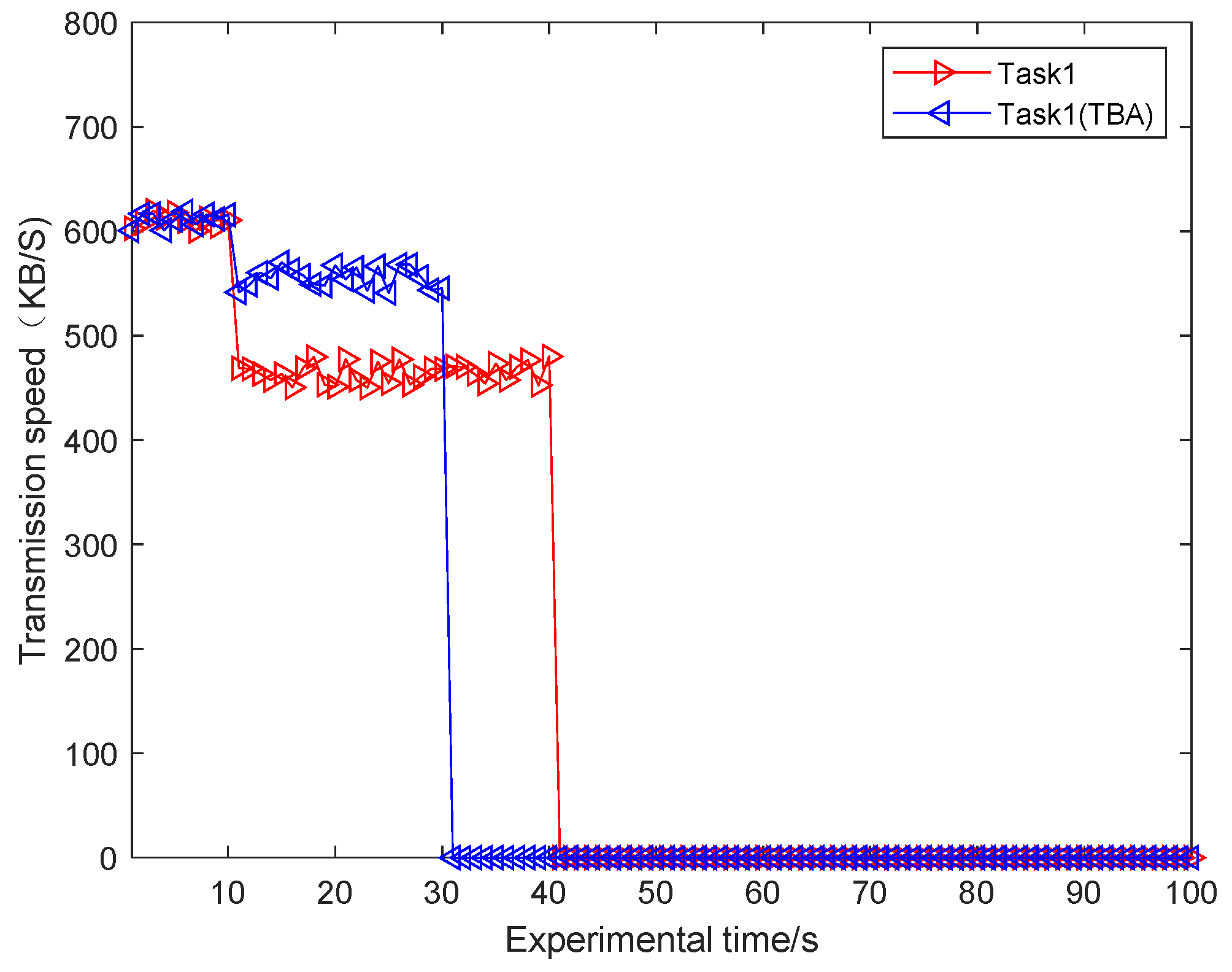
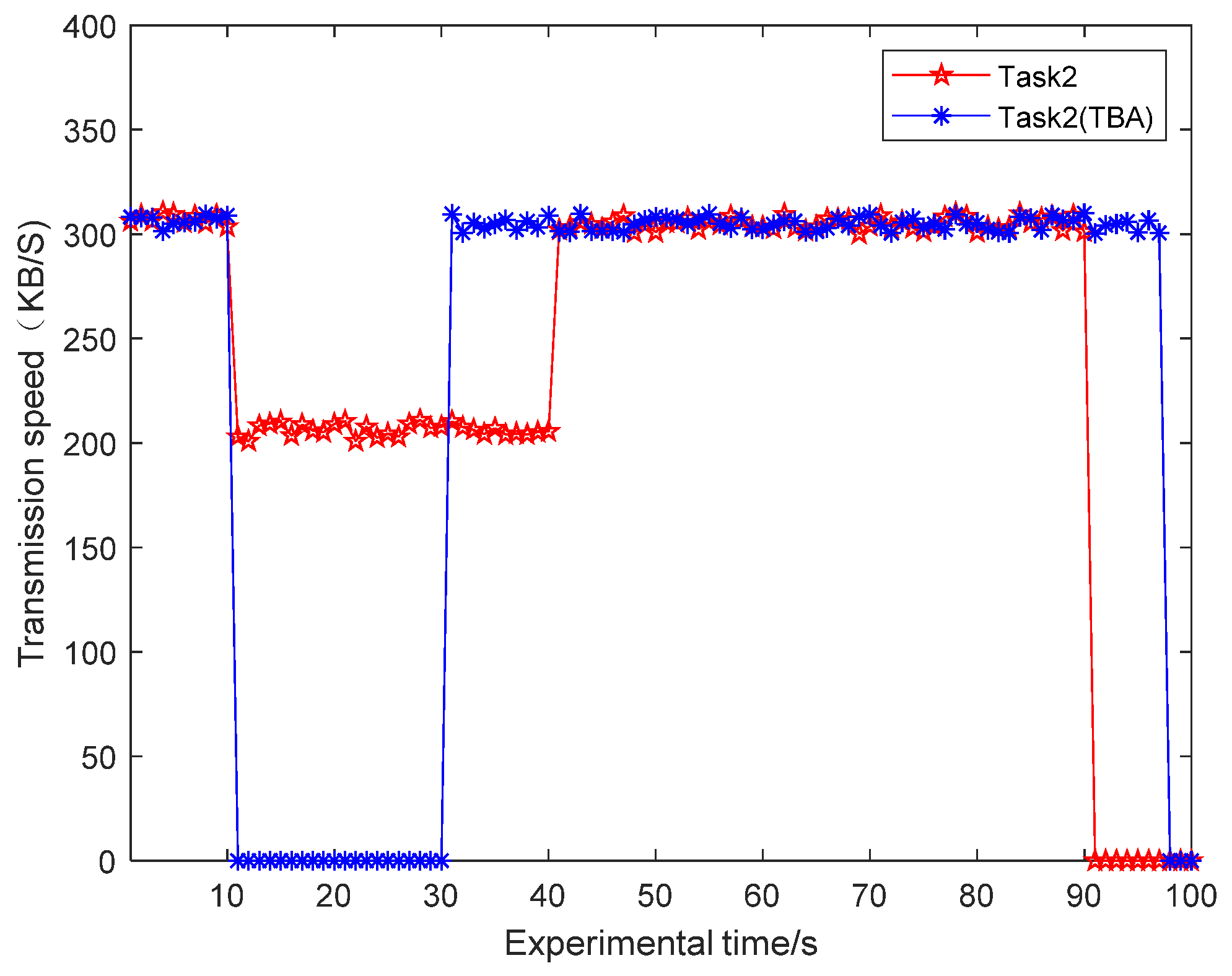
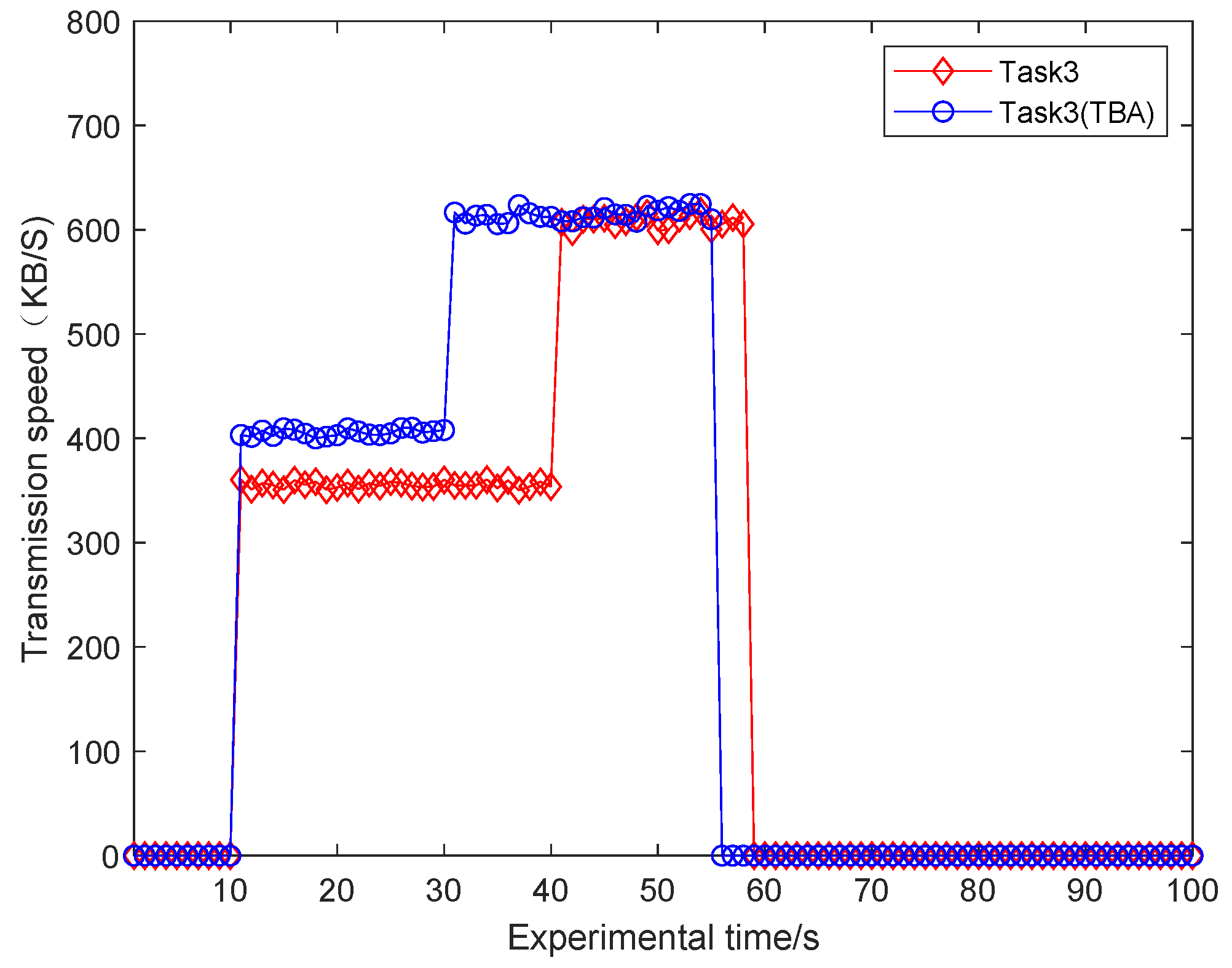
- In view of the transmission of multiple space tasks on the same link, the proposed TBA algorithm can effectively guarantee the timely transmission of important tasks, thereby improving the quality of service of the SIN.
2. Related Work
- (1)
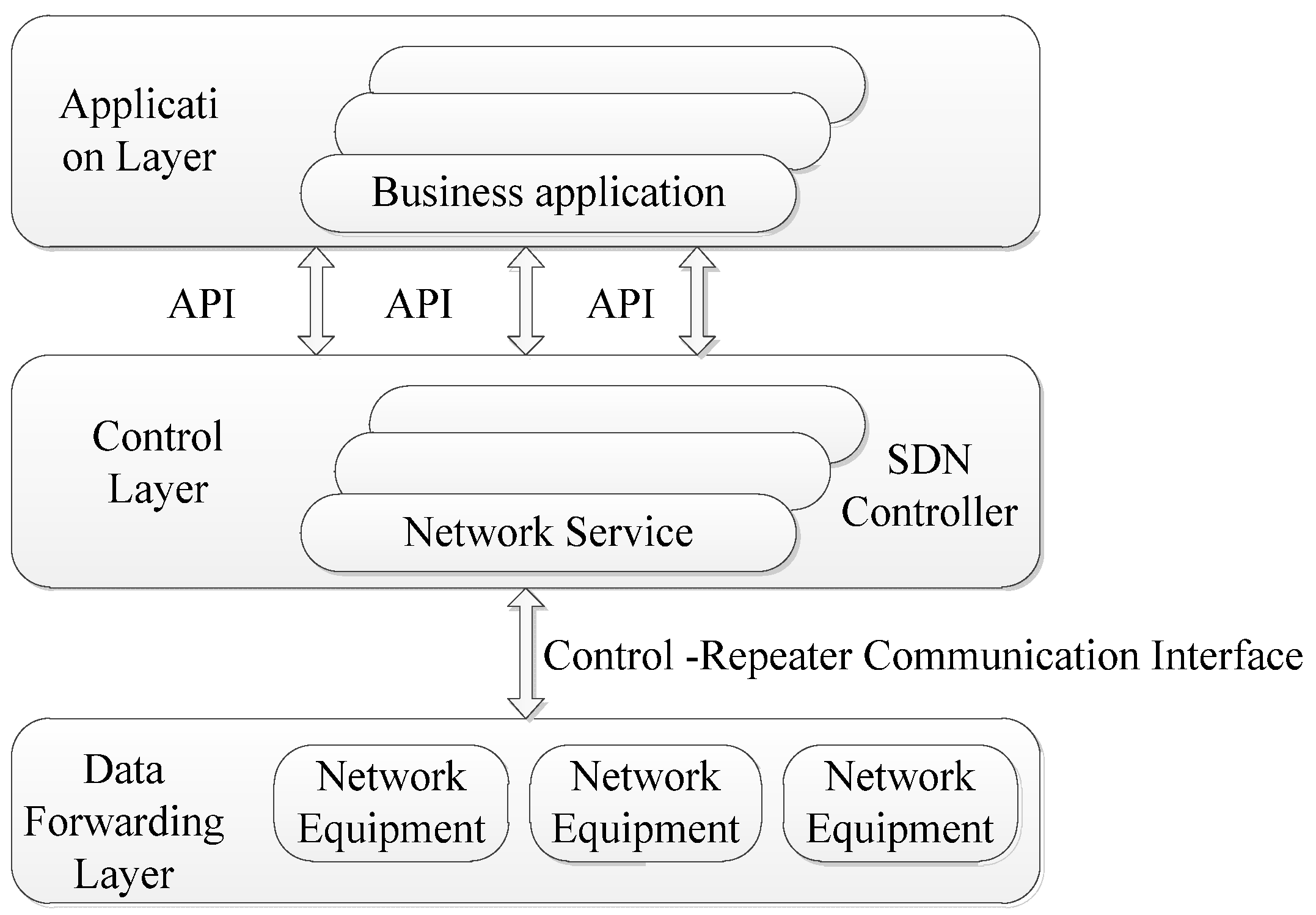
- Data forwarding layer. Data forwarding layer is composed of the underlying forwarding device of the network. Data forwarding layer is responsible for data processing, forwarding and status collection based on the traffic flow table, and executes the fast forwarding of data according to the instructions issued by the control layer.
- (2)
- Control layer. Control layer is responsible for dealing with the abstract information of the data forwarding plane resources. On the one hand, using the southbound interface, the control layer can control the forwarding behavior of the underlying network devices, abstract the resources of the underlying network devices, obtain the information of the underlying network devices, and then generate a global network Abstract view. On the other hand, a control layer provides the abstract model of the underlying network to the upper network application through the northward interface.
- (3)
- Application layer. Application layer mainly includes network applications for various network services in the control layer. It is mainly responsible for managing and controlling the network forwarding/processing strategies for applications [13].
- (1)
- The operation of the SIN has periodicity and regularity. SDN controller can make full use of these information to calculate and manage the network.
- (2)
- Satellite nodes in the SIN run fast, so their topology is highly dynamic. According to this topological information, the SDN controller can perform real-time and efficient operation in order to make the network run efficiently and increase the stability of the network.
- (3)
- SDN network architecture is a centralized network, and SDN controller monitors and manages the whole network uniformly. Therefore, combined with the idea of SDN, the ground SDN controller has the information and real-time data flow of all satellite nodes in the whole network. In this way, the SDN controller can find the optimal transmission path according to the data flow distribution of the whole network, which is conducive to saving the bandwidth resources of satellite communication and avoiding the cost.
- (4)
- In a traditional distributed network, when a new network protocol is deployed or a new algorithm is verified, each server needs to be updated, so that the labor cycle and human resources are enormous. However, combined with the SDN idea, only need to carry out protocol deployment or algorithm migration in the control layer of the network, and then unified calculation by the controller. The network nodes only need to execute the instructions of the controller to verify the performance of the algorithm or protocol. This makes the research and verification of communication network technology more convenient and fast [18,19].
- (5)
- Data plane network equipment in SDN only realizes forwarding function, which can simplify the design of network equipment, facilitate the startup and maintenance of equipment, reduce the cost of equipment, and bring great convenience to on-board equipment.
- (6)
- The global network view of the controller and the open northbound interface in SDN can realize automatic and rapid configuration and response for different dynamic requirements of tasks, and meet the dynamic and fast networking requirements of the SIN.
3. SDN-Based SIN Management Architecture
4. Multi Topology Routing Algorithm
- (1)
- Delay sensitive service. Such services mainly include language services, real-time video interactive services, which allow a certain packet loss rate, but have certain requirements for transmission delay and delay jitter.
- (2)
- Throughput sensitive service. Such services mainly include a large number of data file transfer services. They do not require real-time performance, but they require a certain bandwidth guarantee. Usually, the packet loss rate is required to maintain a constant transmission rate.
- (3)
- Best effort service. Such services have no special requirements for delay, bandwidth, packet loss rate and so on [24].
4.1. Initial Link Weight
4.2. Integrated Link Weight
4.3. TBA Algorithm
| Algorithm 1. TBA Algorithm |
| Input: The path has been selected; Output: Bandwidth resource allocation strategy in the SIN; |
| 1: The bandwidth resource allocation factor of , , are obtained; 2: for New arrives 3: if 4: ; 5: if 6: ; 7: else if 8: Calculate , , according to Formulas (15) and (16). Reallocating bandwidth resources; 9: if , , 10: , , ; 11: else if or or 12: To terminate the transmission of the task that is not satisfied, and recalculate the bandwidth allocation factor for the rest of the tasks; 13: end if 14: end if 15: else if 16: Repeat step 8–12; 17: end if 18: end for |
5. Design and Experiment Results
5.1. Optimal Routing Strategy
- (1)
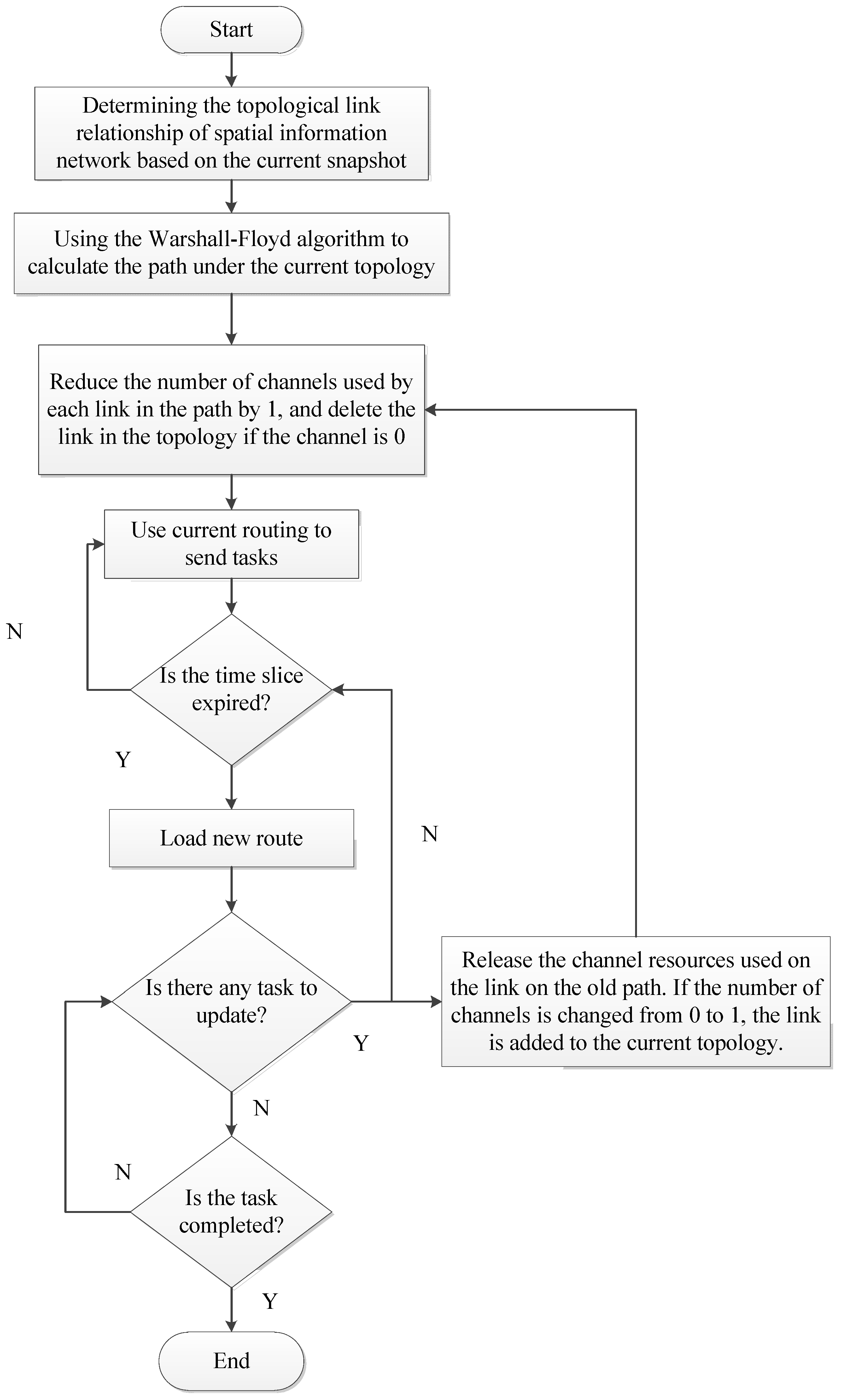
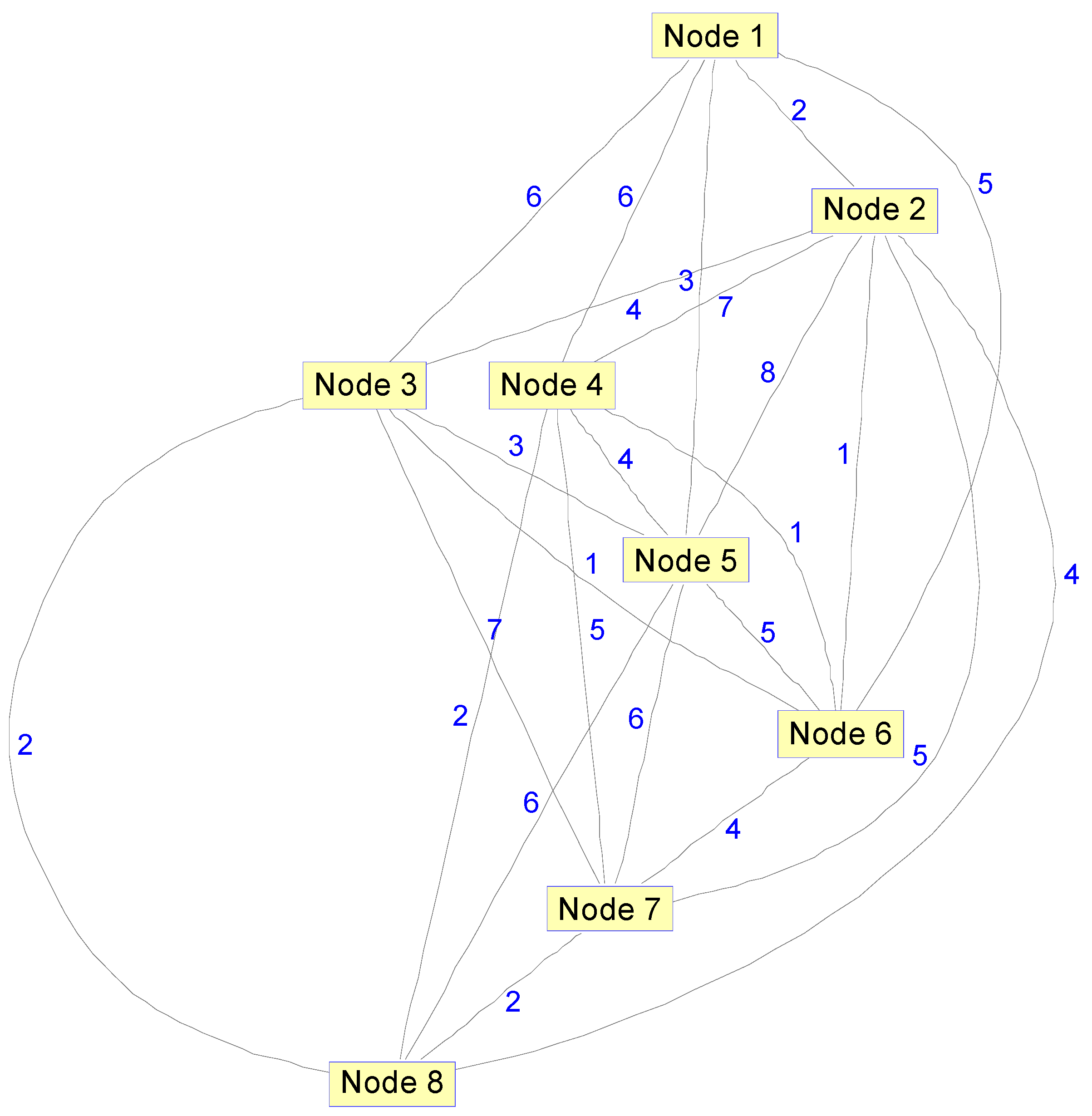
- The graph is , and the vertex set is , calculate the integrated link weight fee of each side of G, where represents the weight of edge , and if and are not adjacent, then .
- (2)
- The basic idea of dynamic programming algorithm is used. For any vertex , the shortest path from vertex to vertex passes through vertex or without vertex . Let be the shortest distance from vertex to , be the shortest distance from vertex to , is the shortest distance from vertex to vertex without vertex .
- (3)
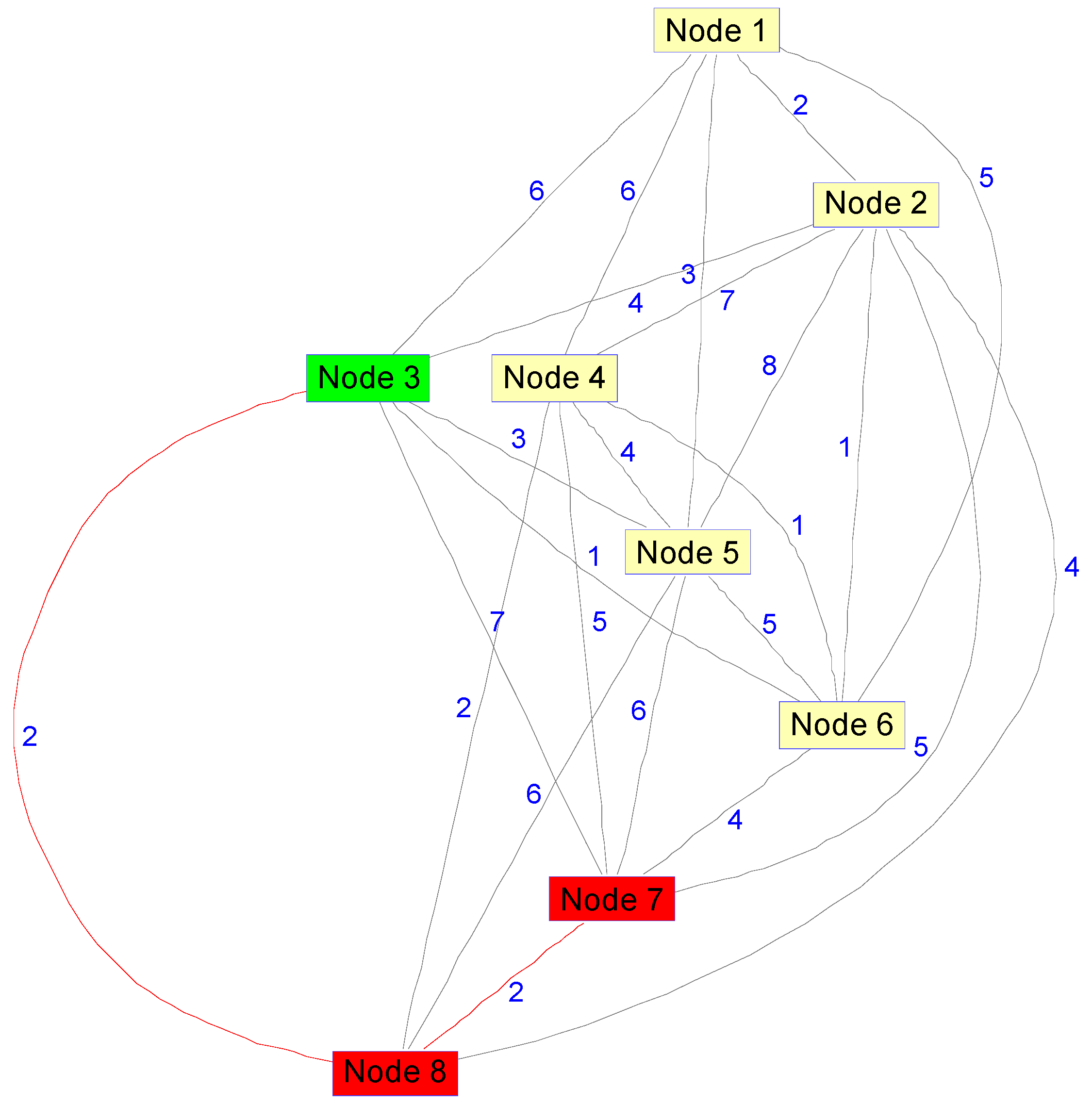
- If , then .
- (4)
- Repeat (3) to search all vertices , is the shortest distance from vertex to vertex [28].
5.2. TBA Algorithm Simulation
6. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, Q.Y.; Meng, W.X.; Yang, M.C.; Zheng, L.M.; Zhang, Z.Z. Virtual multi-beamforming for distributed satellite clusters in space information networks. IEEE Wirel. Commun. 2016, 23, 95–101. [Google Scholar] [CrossRef]
- Zhang, W. Topological Control Theory and Method of Space Information Network; PLA University of Science and Technology: Nanjing, China, 2016; pp. 1–5. [Google Scholar]
- Tang, Q. Research on Routing Strategy Based on QoS in Aerospace Environment; Harbin Institute of Technology: Harbin, China, 2016; pp. 30–50. [Google Scholar]
- Yang, S.Q. Research on Software-Defined Satellite Network Architecture; University of Electronic Science and Technology of China: Chengdu, China, 2016; pp. 20–24. [Google Scholar]
- Ekici, E.; Akyildiz, I.F.; Bender, M.D. A distributed routing algorithm for datagram traffic in LEO satelitte networks. IEEE/ACM Transac. Netw. 2001, 9, 137–147. [Google Scholar] [CrossRef]
- Gounder, V.V.; Prakash, R.; Abu-Amara, H. Routing in LEO-based satellite networks. In Proceedings of the 1999 IEEE Emerging Technologies Symposium on Wireless Communications and Systems, Richardson, TX, USA, 12–13 April 1999; pp. 221–226. [Google Scholar]
- Min, S.L.; Kim, D.N.; Kim, C.S.; Chang, H.S.; Kim, B.W.; Lee, C.G.; Min, S.L.; Choi, Y.; Yang, H.S. FSA-Based Link assignment and routing in Low-Earth orbit satellite networks. IEEE Transac. Veh. Technol. 1998, 8, 1037–1048. [Google Scholar]
- Lu, Y.; Zhao, Y.; Sun, F.; Li, H.; Ni, G.; Wang, D.J. Routing Techniques on Satellite Networks. J. Softw. 2014, 25, 1085–1100. [Google Scholar]
- Li, H.P. Joint Route Selection and Resource Allocation Algorithms in Software-Defined Networking; Chongqing University of Posts and Telecommunications: Chongqing, China, 2017; pp. 11–14. [Google Scholar]
- Aini, A.; Salehipour, A. Speeding up the Floyd–Warshall algorithm for the cycled shortest path problem. Appl. Math. Lett. 2012, 25, 1–5. [Google Scholar] [CrossRef]
- Zhu, S.Y. Research on Routing Algorithm of Space Network Based on SDN; Harbin Institute of Technology: Harbin, China, 2017; pp. 1–19. [Google Scholar]
- Nguyen, V.G.; Do, T.X.; Kim, Y.H. SDN and Virtualization-Based LTE Mobile Network Architectures: A Comprehensive Survey. Wirel. Pers. Commun. 2016, 86, 1401–1438. [Google Scholar] [CrossRef]
- Akhunzada, A.; Khan, M.K. Toward Secure Software Defined Vehicular Networks: Taxonomy, Requirements, and Open Issues. IEEE Commun. Mag. 2017, 55, 110–118. [Google Scholar] [CrossRef]
- Bao, J.; Zhao, B.; Yu, W.; Feng, Z.; Wu, C.; Gong, Z. OpenSAN: A software-defined satellite network architecture. ACM SIGCOMM Comput. Commun. Rev. 2014, 44, 347–348. [Google Scholar] [CrossRef]
- Li, T.; Zhou, H.; Luo, H.; Xu, Q.; Ye, Y. Using SDN and NFV to Implement Satellite Communication Networks. In Proceedings of the 2016 International Conference on Networking and Network Applications (NaNA), Hokkaido, Japan, 23–25 July 2016; pp. 131–134. [Google Scholar]
- Ren, R.W. Research on the SDN-Based Controller of Space-Sky Information Network; Beijing University of Posts and Telecommunications: Beijing, China, 2015; pp. 23–33. [Google Scholar]
- Jing, Y.G. Design of Distributed Controller and Reliability Research on Software Defined Space-Sky Information Network; Beijing University of Posts and Telecommunications: Beijing, China, 2017; pp. 15–32. [Google Scholar]
- Gardikis, G.; Koumaras, H.; Sakkas, C. Towards SDN/NFV-enabled satellite networks. Telecommun. Syst. 2017, 66, 1–14. [Google Scholar] [CrossRef]
- Bertaux, L.; Medjiah, S.; Berthou, P.; Abdellatif, S.; Hakiri, A.; Gelard, P.; Planchou, F.; Bruyere, M. Software defined networking and virtualization for broadband satellite networks. IEEE Commun. Mag. 2015, 53, 54–60. [Google Scholar] [CrossRef]
- Yu, Q.; Wang, J.C.; Bai, L. Architecture and critical technologies of space information networks. J. Commun. Inf. Netw. 2016, 1, 1–9. [Google Scholar] [CrossRef]
- Tian, R. Research on Control Protocol and Routing Algorithms of Software Defined Space-Terrestrial Network; Beijing University of Posts and Telecommunications: Beijing, China, 2017; pp. 9–16. [Google Scholar]
- Nguyen, X.-N.; Saucez, D.; Barakat, C.; Turletti, T. Rules Placement Problem in OpenFlow Networks: A Survey. IEEE Commun. Surv. Tutor. 2016, 18, 1273–1286. [Google Scholar] [CrossRef]
- Huang, J.; Su, Y.; Huang, L.; Liu, W.; Wang, F. An Optimized Snapshot Division Strategy for Satellite Network in GNSS. IEEE Commun. Lett. 2016, 20, 1. [Google Scholar] [CrossRef]
- Yan, D.; Guo, J.; Wang, L.; Zhan, P. SADR: Network status adaptive QoS dynamic routing for satellite networks. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1186–1190. [Google Scholar]
- Qi, X.H. Research on Key Networking Technologies Based on Multiple Satellites Collaboration in Space Information Network; Beijing University of Posts and Telecommunications: Beijing, China, 2015; pp. 35–40. [Google Scholar]
- Li, T.; Zhou, H.; Luo, H.; Yu, S. A Software Defined Framework for Integrated Space-Terrestrial Satellite Communication. IEEE Trans. Mob. Comput. 2018, 17, 703–716. [Google Scholar] [CrossRef]
- Li, T.X. Research on Modeling and Resource Adaptation Methods in Smart Collaborative Network Based Space Networks; Beijing Jiaotong University: Beijing, China, 2018; pp. 83–99. [Google Scholar]
- Muholzoev, A.V.; Masyagin, V.B. Probabilistic Calculation of Tolerances of the Dimension Chain Based on the Floyd-warshall Algorithm. Proc. Eng. 2016, 150, 959–962. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Busy Degree | Delay Forwarding Routing Query Time (s) |
|---|---|
| [0, 0.3) | 0 |
| [0.3, 0.5) | 0.3 |
| [0.5, 0.8) | 0.6 |
| [0.8, 1) | 1 |
| Number of Satellites | Orbital Altitude/km | Orbital Inclination | Orbital Period/s | Orbit Number | Link State | Minimum Elevation | |
|---|---|---|---|---|---|---|---|
| MEO | 12 | 10,355 | 55.0 | 21,600 | 3 | Permanent | 22 |
| LEO | 48 | 1400 | 52.0 | 6840 | 8 | Permanent | 10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, X.; Wu, L.; Yu, S. Multi-Topology Routing Algorithms in SDN-Based Space Information Networks. Future Internet 2019, 11, 15. https://doi.org/10.3390/fi11010015
Meng X, Wu L, Yu S. Multi-Topology Routing Algorithms in SDN-Based Space Information Networks. Future Internet. 2019; 11(1):15. https://doi.org/10.3390/fi11010015
Chicago/Turabian StyleMeng, Xiangli, Lingda Wu, and Shaobo Yu. 2019. "Multi-Topology Routing Algorithms in SDN-Based Space Information Networks" Future Internet 11, no. 1: 15. https://doi.org/10.3390/fi11010015
APA StyleMeng, X., Wu, L., & Yu, S. (2019). Multi-Topology Routing Algorithms in SDN-Based Space Information Networks. Future Internet, 11(1), 15. https://doi.org/10.3390/fi11010015