Mobility Range of a Cable Skidder for Timber Extraction on Sloped Terrain





Abstract
:
1. Introduction
2. Materials and Methods
- Maximal slope during uphill timber extraction by a cable skidder based on its traction performance (gradeability),
- Maximal slope during downhill timber extraction by a cable skidder when thrust force is equal to zero.
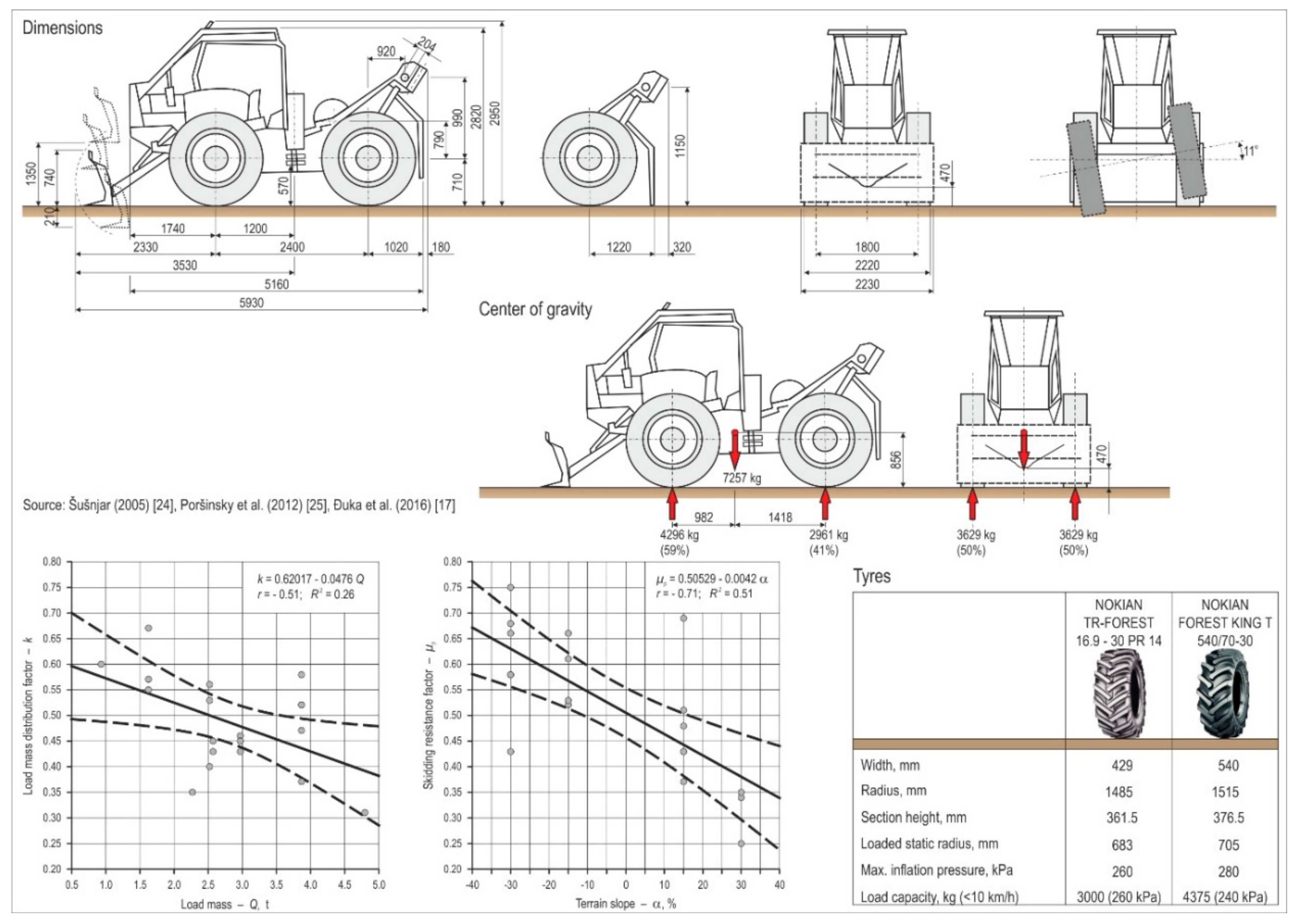
- Unloading of the front axle (G1) [28], whereas at least 10% of total dynamic load should be on the front axle (G1 > 0.1 Ga), so the control of the vehicle is possible;
- Overload on the rear axle (G2) [16], by which the load on the rear axle of the skidder must not be higher than the total weight of a skidder (G2 < G);
- Maximal terrain slope [29] after which the load starts to push the skidder downhill, which is defined as the moment when horizontal component of rope force becomes zero (H = 0);
- Minimal soil bearing capacity [30] based on environmentally sound timber extraction depending on cone index and nominal ground pressure ratio (CImin > 7.2 NGP);
- Allowed tyre load capacity (with different tyre sizes) regarding the recommended inflation pressures given by the manufacturer [31].
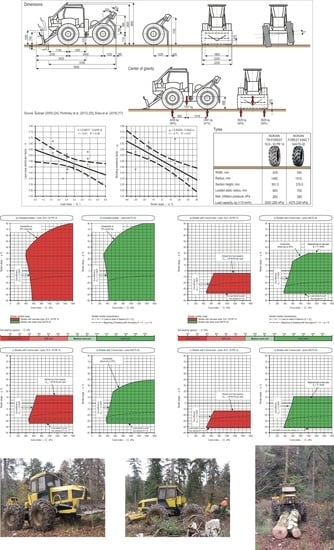
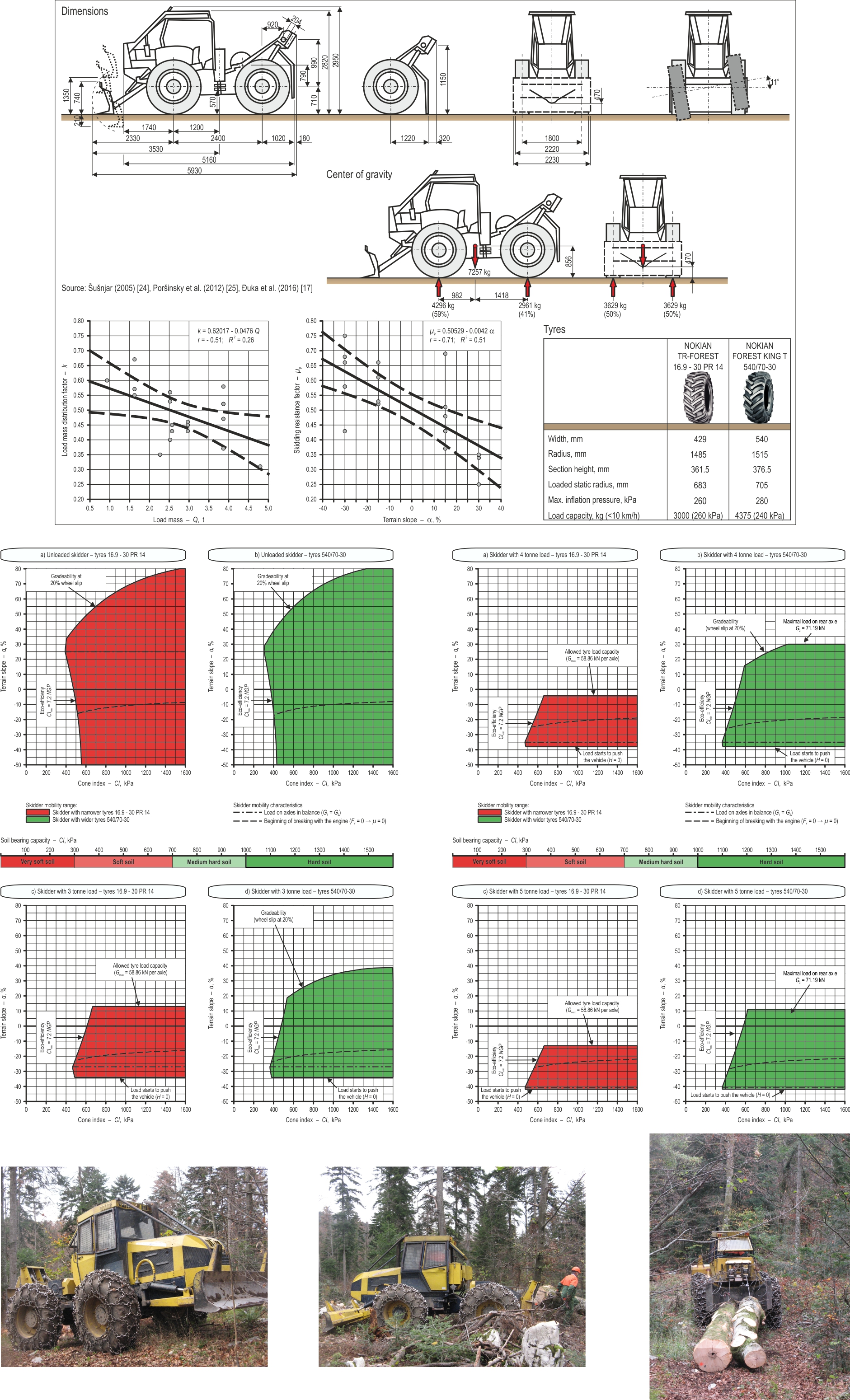
3. Results
- Unloading of the front axle (G1 > 0.1 Ga)—this criterion did not show its influence up to 4 tonne load and terrain slope above +40% and with 5 tonne load at terrain slope higher than +25%.
- Overload on the rear axle (G2 < G)—this criterion also did not show its influence up to 4 tonne load at terrain slope over +30% and with 5 tonne load at terrain slope beyond +11%.
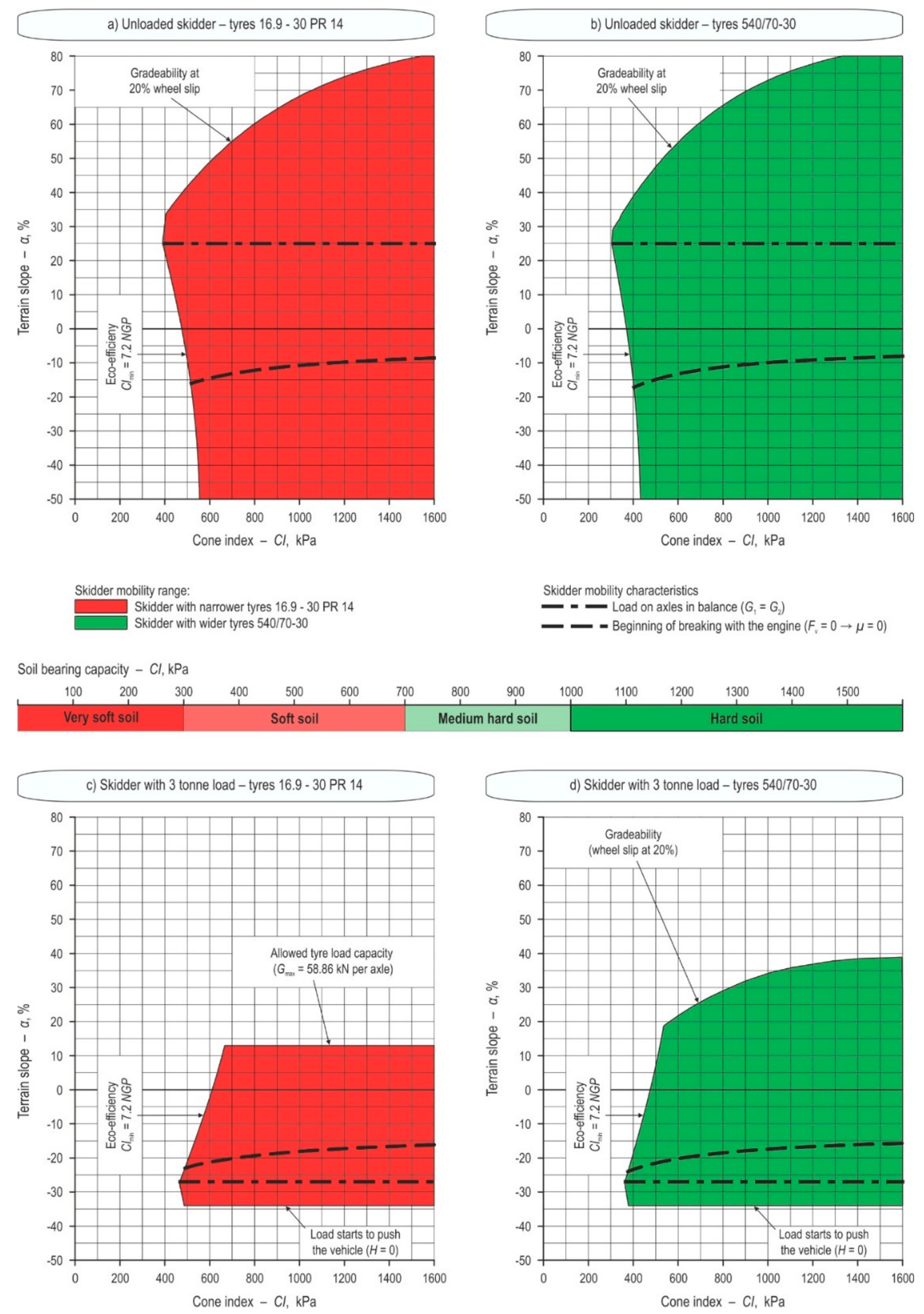
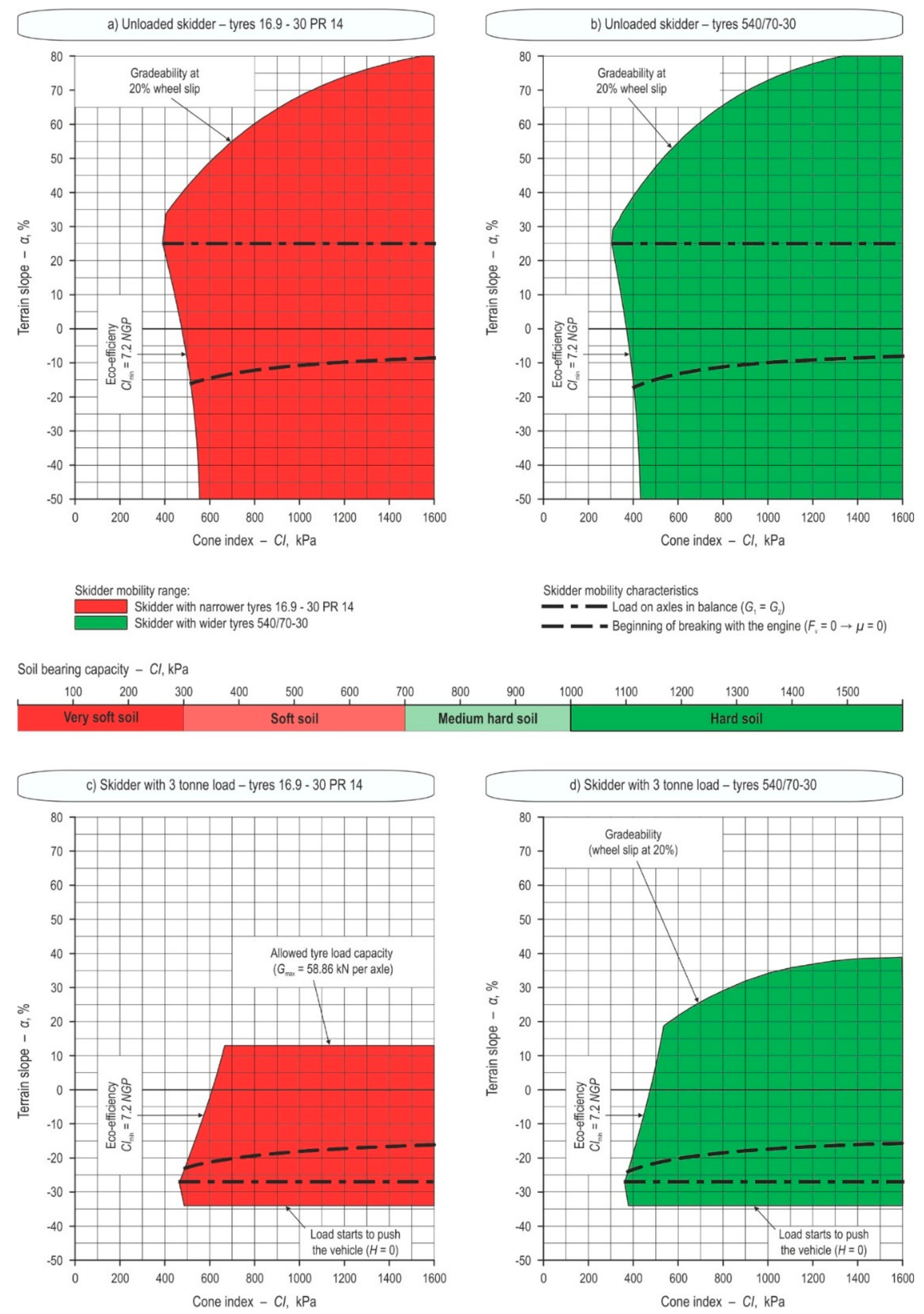
- Allowed tyre load capacity of narrower tyres 16.9–30 PR14 (58.86 kN per axle)—narrower tyres did not impact timber transport up to 2 tonne load, but with 3 tonne load at +13% overload occurred. During 4 tonne load wheel overload is at –3% and by adding one more tonne overload starts at −13% of terrain slope.
- Allowed tyre load capacity of wider tyres 540/70-30 (85.84 kN per axle)—this criterion did not show its influence with loads up to 5 tonnes.
- During skidding of 1 tonne load uphill, skidder mobility is under influence of the gradeability (tractive performance) i.e., maximal terrain slope at +63% and minimal cone index at 1600 kPa. During downhill movement loss of drawbar pull is evident (net traction factor equals to zero) and at that moment the skidder will start to break with the engine at slopes between −10% and −15% even though transfer of load from rear to front axle is on 0% slope (G1 > G2). Downhill skidding should be up to −26% of terrain slope after which load starts to hit the rear protection plate.
- While skidding 2 tonne load, applicability of the uphill skidding is defined by gradeability where maximal reachable terrain slope with wider tyres is at 45% with minimal CI = 1100 kPa including environmental factor ratio (CImin = 7.2 NGP). In downhill skidding, the beginning of braking with the engine correlates to the moment of load balance on both axles (G1 = G2) at −16% terrain slope. Maximal downhill slope is −30%, at which point horizontal component of rope force is equal to zero (H = 0) and load starts to hit the rear protection plate.
- When skidding 3 tonne load (Figure 2c,d) there is a clear difference between use of narrower and wider tyres on skidder performance uphill (Figure 2). For a skidder with narrower tyres allowed tyre load capacity (Gmax = 58.86 kN per axle) showed its influence at +13% slope and by adding wider tyres performance rose up to +39% terrain slope. At +39% terrain slope gradeability (with a minimal CI = 800 kPa) showed influence on skidder mobility. Braking with the engine will start prior to balancing of load on both axles at −27% terrain slope, while the limiting slope for skidding load of 3 tonnes downhill is at −34%.
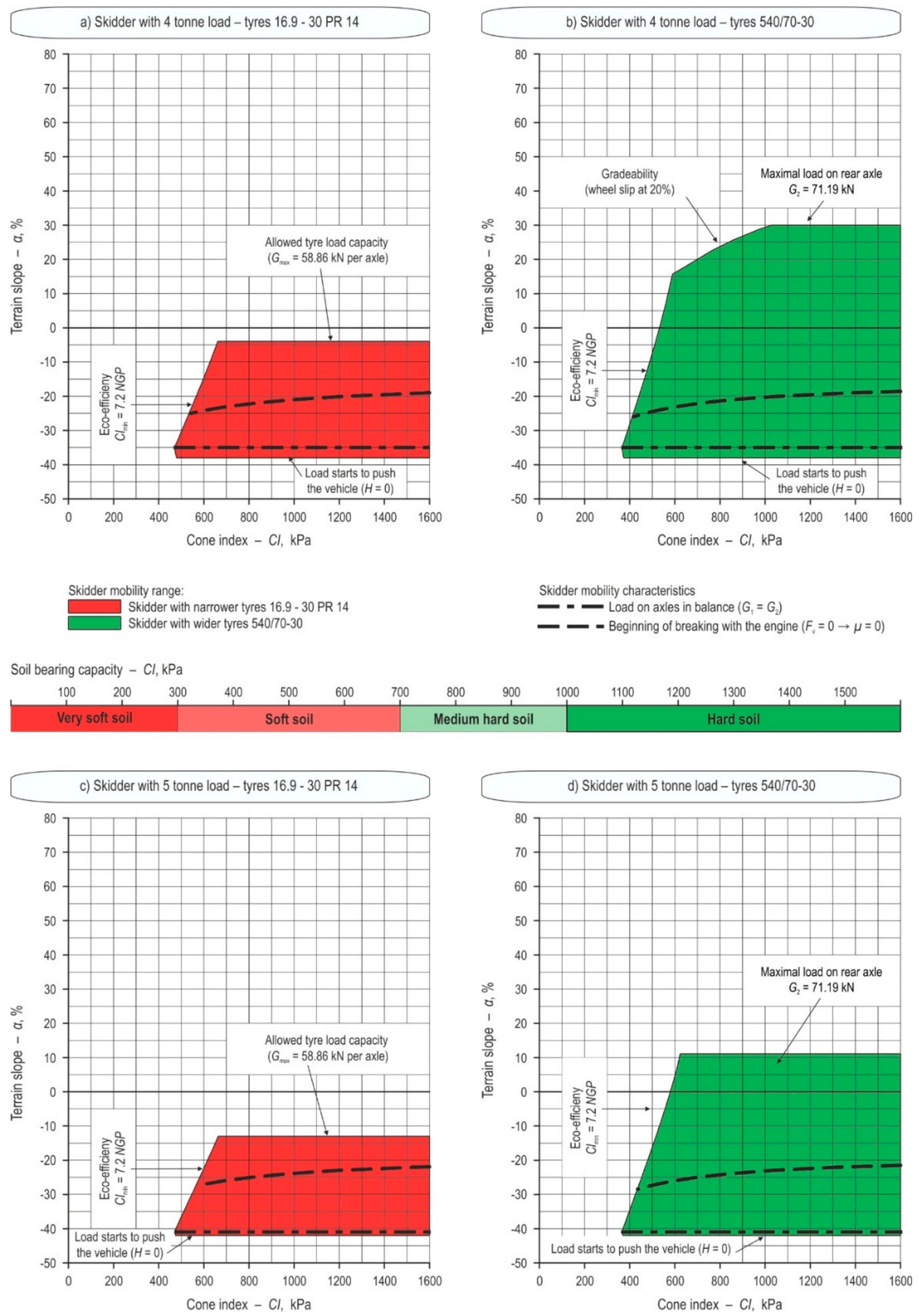
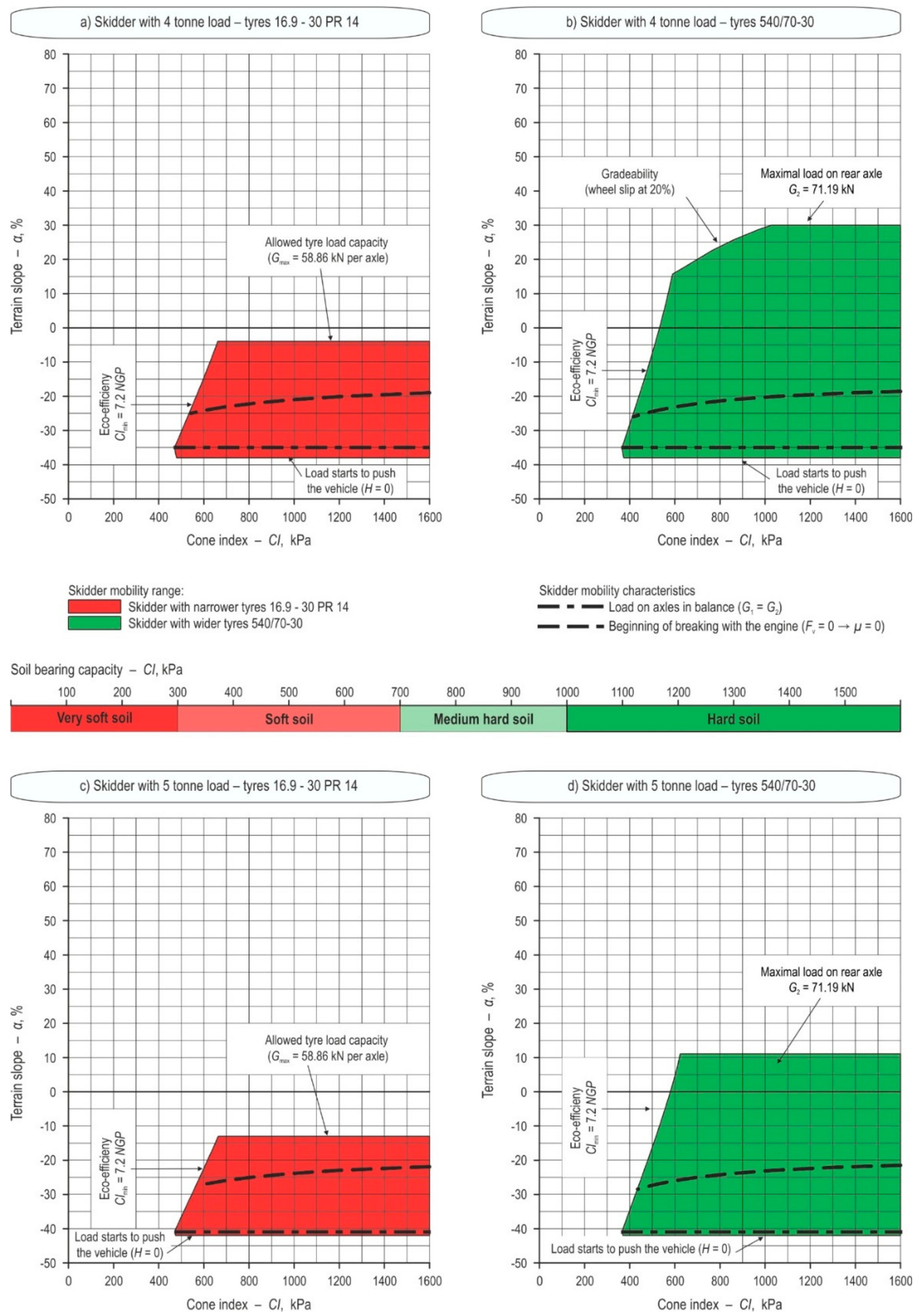
- If loading a skidder with a 4 tonne load (Figure 3a,b) its working range regarding terrain slope changes (Figure 3). With narrower tyres skidder should transport timber only downhill (below −4% slope) since allowed tyre load capacity (Gmax = 58.86 kN per axle) shows its influence. When skidding downhill, a loss of drawbar pull at −25% slope is noticeable. Transfer of load from rear to front axle (G1 > G2) starts at terrain slope below −35% and the load starts to push the vehicle at −38% of terrain slope. By using wider tyres, working range of a cable skidder increases in uphill skidding up to +30% of terrain slope, at which point overload on the rear axle would occur G2 = 71.19 kN.
- With adding one tonne more and transporting a total of 5 tonnes (Figure 3c,d), skidder could go further down the slope up to −42%. Loss of drawbar pull is between −20% to −25% of downhill skidding and the transfer of load from rear to front axle (G1 > G2) is at −41% of terrain slope. When using wider tyres, uphill timber transport would extend to +11% of terrain slope, after which overload on the rear axle will start G2 = 71.19 kN.
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wong, J.Y. Mechanics of off-road vehicle—Terrain interaction. In Road and off-Road Vehicle Systems Dynamics Handbook, 1st ed.; Mastinu, G., Ploechl, M., Eds.; CRC Press: Boca Raton, FL, USA, 2014; pp. 697–726. ISBN 978-0-8493-3322-4. [Google Scholar]
- Heinimann, H.R. Mechanisierte Holzernte in Hanglagen. Wald und Holz 1995, 76, 32–36. [Google Scholar]
- Visser, R.; Stampfer, K. Expanding ground-based harvesting onto steep terrain: A review. Croat. J. For. Eng. 2015, 36, 321–331. [Google Scholar]
- Talbot, B.; Pierzchała, M.; Astrup, R. Applications of remote and proximal sensing for improved precision in forest operations. Croat. J. For. Eng. 2017, 38, 327–336. [Google Scholar]
- Cambi, M.; Certini, G.; Neri, F.; Marchi, E. The impact of heavy traffic on forest soils: A review. For. Ecol. Manag. 2015, 338, 124–138. [Google Scholar] [CrossRef] [Green Version]
- Solgi, A.; Naghdi, R.; Tsioras, P.A.; Ilstedt, U.; Salehi, A.; Nikooy, M. Combined Effects of Skidding Direction, Skid Trail Slope and Traffic Frequency on Soil Disturbance in North Mountainous Forest of Iran. Croat. J. For. Eng. 2017, 38, 97–106. [Google Scholar]
- Ackerman, P.; Pulkki, R.; Odhiambo, B. Comparison of cable skidding productivity and cost: Pre-choking mainline versus tagline systems. Croat. J. For. Eng. 2016, 37, 261–268. [Google Scholar]
- Kulak, D.; Stańczykiewicz, A.; Szewczyk, G. Productivity and time consumption of timber extraction with a grapple skidder in selected pine stands. Croat. J. For. Eng. 2017, 38, 55–63. [Google Scholar]
- Gil, W. Ground extraction of wood by skidders from the aspect of the logging code of practice. Sylwan 2000, 144, 59–74. [Google Scholar]
- Kocel, J. The role of the forest services sector in the socio-economic environment of the state forest. For. Lett. 2013, 104, 23–33. [Google Scholar]
- Marchi, E.; Picchio, R.; Spinelli, R.; Verani, S.; Venanzi, R.; Certini, G. Environmental impact assessment of different logging methods in pine forests thinning. Ecol. Eng. 2014, 70, 429–436. [Google Scholar] [CrossRef]
- Heinimann, H.R. Ground-based harvesting systems for steep slopes. In Proceedings of the International Mountain Logging and 10th Pacific Northwest Skyline Symposium, Corvallis, OR, USA, 28 March–1 April 1999; pp. 1–19. [Google Scholar]
- Wong, J.Y. Dynamics of off-road vehicles. In Road and off-Road Vehicle Systems Dynamics Handbook, 1st ed.; Mastinu, G., Ploechl, M., Eds.; CRC Press: Boca Raton, FL, USA, 2014; pp. 1279–1311. ISBN 978-0-8493-3322-4. [Google Scholar]
- Alexandrovich, Y.K. The Issue of Evaluation of Stability of Skidders. World Appl. Sci. J. 2013, 24, 971–979. [Google Scholar] [CrossRef]
- Gibson, H.G.; Biller, C.J. Side-Slope Stability of Logging Tractors and Forwarders. Trans. ASAE 1974, 17, 245–250. [Google Scholar] [CrossRef]
- Horvat, D. Defining traction characteristics of a forestry tractor–skidder. Meh. Šumar. 1990, 15, 113–118. [Google Scholar]
- Đuka, A. Development of Terrain Trafficability Model for Planning Timber Extraction by Skidder. Ph.D. Thesis, Faculty of Forestry, University of Zagreb, Zagreb, Croatia, 2014; pp. 1–303. [Google Scholar]
- Đuka, A.; Pentek, T.; Horvat, D.; Poršinsky, T. Modelling of Downhill Timber Skidding: Bigger Load–Bigger Slope. Croat. J. For. Eng. 2016, 37, 139–150. [Google Scholar]
- Poršinsky, T.; Moro, M.; Đuka, A. Maneuverability of Cable Skidder. Sumar. List 2016, 140, 259–272. [Google Scholar]
- Marenče, J. With skidder and load down the skid trail–does in this case a slip of the wheel also influence the forest ground? In pushing the boundaries with research and innovation in forest engineering. In Proceedings of the 44th International Symposium on Forestry Mechanisation, Graz, Austria, 9–13 October 2011; pp. 1–10. [Google Scholar]
- Marenče, J. Effect of Transmission Type on Wheel Slip under Overload—Presented on the Example of the AGT 835 T. Tractors. Croat. J. For. Eng. 2014, 35, 221–231. [Google Scholar]
- Bekker, M.G. Introduction to Terrain-Vehicle Systems; The University of Michigan Press: Ann Arbor, MI, USA, 1969; pp. 1–846. [Google Scholar]
- Marchi, E.; Chung, W.; Visser, R.; Abbas, D.; Nordfjell, T.; Mederski, P.S.; McEwan, A.; Brink, M.; Laschi, A. Sustainable Forest Operations (SFO): A new paradigm in a changing world and climate. Sci. Total Environ. 2018, 634, 1385–1397. [Google Scholar] [CrossRef] [PubMed]
- Šušnjar, M. Interactions between Soil Characteristics of Skid Trail and Tractive Characteristics of Skidder. Ph.D. Thesis, Faculty of Forestry, University of Zagreb, Zagreb, Croatia, 2005; pp. 1–146. [Google Scholar]
- Poršinsky, T.; Šušnjar, M.; Đuka, A. Determination of load mass distribution and skidding factors. Nova Meh. Šumar. 2012, 33, 35–44. [Google Scholar]
- Saarilahti, M. Soil Interaction Model. Development of a Protocol for Eco-Efficient Wood Harvesting on Sensitive Sites (Ecowood); Contract No. QLK5-1999-00991; University of Helsinki: Helsinki, Finland, 2002; pp. 1–87. [Google Scholar]
- Mellgren, P.G. Terrain Classification for Canadian Forestry; FERIC, Canadian Pulp and Paper Association: Montreal, QC, Canada, 1980; pp. 1–13. [Google Scholar]
- Weise, G.; Nick, L. Determining the performance and the environmental impact of forest machines–Classification numbers and performance diagrams. In Proceedings of the Austro 2003—High Tech Forest Operations for Mountainous Terrain, Schlaegl, Austria, 5–9 October 2003; pp. 1–10. [Google Scholar]
- Šušnjar, M.; Bosner, A.; Poršinsky, T. Skidder traction performance in downhill timber extraction. Nova Meh. Šumar. 2010, 31, 3–14. [Google Scholar]
- Wronski, E.B.; Humphreys, N. A method for evaluating the cumulative impact of ground-based logging systems on soils. J. For. Eng. 1994, 5, 9–20. [Google Scholar] [CrossRef]
- Nokian Tyres. Available online: https://www.nokiantyres.com/ (accessed on 15 May 2014).
- Iff, R.H.; Koger, J.L.; Burt, E.C.; Culver, E.W. CARTS: Capacity Analysis of Rubber-Tired Skidder. Trans. ASABE 1984, 27, 0660–0664. [Google Scholar] [CrossRef]
- Gleason, K.H. A Mobility Model for Tracked Vehicles. Master’s Thesis, Oregon State University, Corvallis, OR, USA, 1985; pp. 1–150. [Google Scholar]
- Spong, B.D. SkidPC 2000: A. Mobility, Production, and Rut Depth Simulation Program. Master’s Thesis, Department of Forest Engineering—Oregon State University, Corvallis, OR, USA, 2001; pp. 1–73. [Google Scholar]
- Eichrodt, A.W. Development of a Spatial Trafficability Evaluation System. Ph.D. Thesis, ETH, Zurich, Switzerland, 2003; pp. 1–165. [Google Scholar]
- Lubello, D. A Rule Based SDSS for Integrated Forest Harvesting Planning. Ph.D. Thesis, University of Padua, Padoua, Italy, 2008; pp. 1–213. [Google Scholar]
- Sever, S. Research of Exploitation Parameters for Tractors Used for Timber Extraction. Ph.D. Thesis, Faculty of Forestry, University of Zagreb, Zagreb, Croatia, 1980; pp. 1–301. [Google Scholar]
- Šušnjar, M.; Horvat, D. Dynamic wheel load of a skidder during timber extraction. Glas šum Pokuse 2006, 5, 601–616. [Google Scholar]
- Tomašić, Ž. Research of the Technical-Working Characteristics of Skidder for Thinnings. Ph.D. Thesis, Faculty of Forestry, University of Zagreb, Zagreb, Croatia, 2007; pp. 1–316. [Google Scholar]
- Tomašić, Ž.; Horvat, D.; Šušnjar, M. Wheel load distribution of skidders in timber extraction. Nova Meh. Šumar. 2007, 28, 27–36. [Google Scholar]
- Tomašić, Ž.; Šušnjar, M.; Horvat, D.; Pandur, Z. Forces Affecting Timber Skidding. Croat. J. For. Eng. 2009, 30, 127–139. [Google Scholar]
- Sutherland, B.J. Preventing Soil Compaction and Rutting in the Boreal Forest of Western Canada: A Practical Guide to Operating Timber-Harvesting Equipment; FERIC Advantage Montreal: Quebec, QC, Canada, 2003; Volume 4, pp. 1–52. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles, 3rd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2001; ISBN 0-471-35461-9. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Downhill Skidding | Uphill Skidding | Directory | ||
|---|---|---|---|---|
| Adhesive weight (1) | α—Longitudinal terrain slope, % G—Skidder weight, kN Ga—Adhesive weight, kN G1—Load on front axle, kN G2—Load on rear axle, kN Fo—Thrust force, kN Fd—Drawbar pull, kN H—Horizontal component of rope force, kN V—Vertical component of rope force, kN Q—Load weight, kN f—Rolling resistance factor k—Load mass distribution factor μ—Net traction factor μp—Skidding resistance factor a—Distance from centre of gravity to rear axle b—Distance from centre of gravity to front axle c—Distance from horizontal rollers to rear end d—Height of horizontal rollers ht—Centre of gravity height | |||
| Ga = G cos α + V | ||||
| Vertical component of rope force (2) | ||||
| V = k Q cos α | ||||
| Horizontal component of rope force (3) and (4) | ||||
| H = Q (1 − k) cosα μp − Q sin α | H = Q (1 − k) cos α μp + Q sin α | |||
| Front axle load (5) and (6) | ||||
| G1 = (G cos α a + G sin α ht − H d − V c)/L | G1 = (G cos α a − G sin α ht − H d − V c)/L | |||
| Rear axle load (7) and (8) | ||||
| G2 = (G cos α b − G sin α ht + H d + V (L + c))/L | G2 = (G cos α b + G sin α ht + H d + V (L + c))/L | |||
| Angle of longitudinal stability (9) and (10) | ||||
| tg α = (G b + Q (1 − k) μp d + k Q (L+c))/(Q d − G ht) | tg α = (G a − Q (1 − k) μp d − k Q c)/(Q d + G ht) | |||
| Critical load in reference to longitudinal stability (11) and (12) | ||||
| Qcrit = (G (a cos α + ht sin α))/(d sin α + k c cos α + d (1 − k) μp cos α) | Qcrit = (G (a cos α − ht sin α))/(d sin α + k c cos α + d (1 − k) μp cos α) | |||
| Drawbar pull (13) and (14) | ||||
| Fd = H − Ga sin α | Fd = H + Ga sin α | |||
| Net traction factor (15) and (16) | ||||
| μ = Fd/Ga = (H − Ga sin α)/Ga | μ = Fd/Ga = (H + Ga sin α)/Ga | |||
| Brixius mobility model (17)–(19) | Tyre deflection (20) Δ = 0.008 + 0.001 (0.365 + (170/pi)) Gw | |||
| Nw = ((CI b d)/Gw) (1 + 5 (Δ/h))/(1 + 3 (b/d)) | f = (1.0/Nw) + 0.04 + ((0.5 δ)/√Nw) | κ = 0.88 (1 − e−0.1 Nw) (1 − e−7.5 δ) | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Đuka, A.; Poršinsky, T.; Pentek, T.; Pandur, Z.; Vusić, D.; Papa, I. Mobility Range of a Cable Skidder for Timber Extraction on Sloped Terrain. Forests 2018, 9, 526. https://doi.org/10.3390/f9090526
Đuka A, Poršinsky T, Pentek T, Pandur Z, Vusić D, Papa I. Mobility Range of a Cable Skidder for Timber Extraction on Sloped Terrain. Forests. 2018; 9(9):526. https://doi.org/10.3390/f9090526
Chicago/Turabian StyleĐuka, Andreja, Tomislav Poršinsky, Tibor Pentek, Zdravko Pandur, Dinko Vusić, and Ivica Papa. 2018. "Mobility Range of a Cable Skidder for Timber Extraction on Sloped Terrain" Forests 9, no. 9: 526. https://doi.org/10.3390/f9090526
APA StyleĐuka, A., Poršinsky, T., Pentek, T., Pandur, Z., Vusić, D., & Papa, I. (2018). Mobility Range of a Cable Skidder for Timber Extraction on Sloped Terrain. Forests, 9(9), 526. https://doi.org/10.3390/f9090526