The Utility of Image-Based Point Clouds for Forest Inventory: A Comparison with Airborne Laser Scanning


 ,
,  ,
,
Abstract
:
1. Introduction

{kind=link}
{kind=link}
{kind=link}
| Study | Location | Forest Type |
|---|---|---|
| Næsset and Bjerknes, 2001 [15] | Southeast Norway | Young forests (i.e., <6 m in height) dominated by Norway spruce (Picea abies (L.) Karst.) and Scots pine (Pinus sylvestris L.). |
| Lim et al., 2003 [16] | Ontario, Canada | Mature sugar maple (Acer saccharum Marsh.) and yellow birch (Betula alleghaniensis Britton). |
| Holmgren, 2004 [17] | Southwest Sweden | Norway spruce (Picea abies (L.) Karst.), Scots pine (Pinus sylvestris L.) and birch (Betula spp.). |
| Corona and Fattorini, 2008 [18] | Northern Italy | Lowland forest dominated by Pedunculate oak (Quercus robur L.), European turkey oak (Quercus cerris L.), and European hornbeam (Carpinus betulus L.). |
| Rooker Jensen et al., 2006 [19] | Northern Idaho, USA | Douglas fir (Pseudotsuga menziesii (Mirb.) Franco), Ponderosa pine (Pinus ponderosa Dougl. ex P. & C. Laws.), Grand fir (Abies grandis (Dougl. ex D. Don) Lindl.), Western Larch (Larix occidentalis Nutt.), Lodgepole pine (Pinus contorta Dougl. Ex Loud.), Engelmann spruce (Picea engelmanni Parry ex Engelm.), Pacific yew (Taxus brevifolia Nutt.), and mixed conifer. |
| Hawbaker et al., 2010 [20] | Southern Wisconsin, USA | Upland forests dominated by oak (Quercus spp.), ash (Fraxinus spp.), and hickories (Carya spp.). Remnant white pine (Pinus strobus), hemlock (Tsuga canadensis), and yellow birch (Betula alleghaniensis) dominated stands are present on cooler north facing slopes. |
| Woods et al., 2011 [21] | Ontario, Canada | Black spruce (Picea mariana [Mill.] BSP), white birch (Betula papyrifera Marsh.), trembling aspen (Populous tremuloides Michx.), jack pine (Pinus banksiana Lamb.), eastern white cedar (Thuja occidentalis L.), white spruce (Picea glauca [Moench] Voss), eastern larch (Larix laricina [Du Roi] K. Koch), and balsam fir (Abies balsamea [L.] Mill.). |
| Lindberg and Hollaus, 2012 [22] | Southwest Sweden | Norway spruce (Picea abies), Scots pine (Pinus sylvestris), birch (Betula pendula and Betula pubescens), oak (Quercus robur). |
| Nord-Larsen and Schumacher, 2012 [23] | Denmark | A wide range of forest ecotypes, stand treatments, tree species, and tree species mixtures. |
2. Airborne Laser Scanning (ALS) Data
3. Image-Based Point Clouds
| Context | Issues |
|---|---|
| General issues |
|
| Forestry-specific |
|
| Multi-temporal |
|
| Mitigation strategies to the above known problems |
|
4. Comparison of ALS and Image-Based Point Clouds
4.1. Acquisition, Processing, and Products
| Parameter | Advantage | Notes | Reference |
|---|---|---|---|
| ACQUISITION | |||
| Flight planning | Imagery | Digital imagery has wide swaths and overlap in both the along-track and cross-track directions that makes the block geometry more stable, providing redundancy for processing. In steep terrain, planning for ALS is particularly challenging as maximum flying height is restricted by laser power. The number and positioning of GPS base stations must be considered. | Baltsavias, 1999 [47] |
| Flying time and area covered | Imagery | Image platforms are able to fly higher and faster than ALS platforms. Imaging instruments will typically have a FOV of 75°; ALS FOV (for forest applications) are ≤25°. Thus, for the same number of flying hours, image acquisition can cover a much larger area. | Baltsavias, 1999 [47] Leberl et al., 2010 [7] |
| Flying conditions | ALS | More flying hours per day are possible with ALS, which is insensitive to shadow. Imagery is strongly influenced by solar illumination and view angles (sun, surface, and sensor geometry). Occlusions caused by shadows are particular problematic for generation of image-based point clouds in forest canopies. | Baltsavias, 1999 [47] Gehrke et al., 2011 [43] |
| PROCESSING | |||
| Efficiency | ALS | Time required to go from acquisition to point cloud is shorter for ALS, although this advantage has narrowed over time with the advent of fully digital photogrammetric workflows. | Baltsavias, 1999 [47] Leberl et al., 2010 [7] |
| PRODUCTS | |||
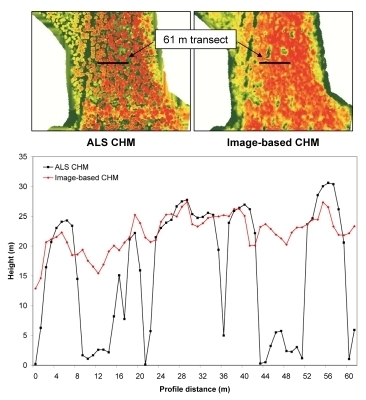
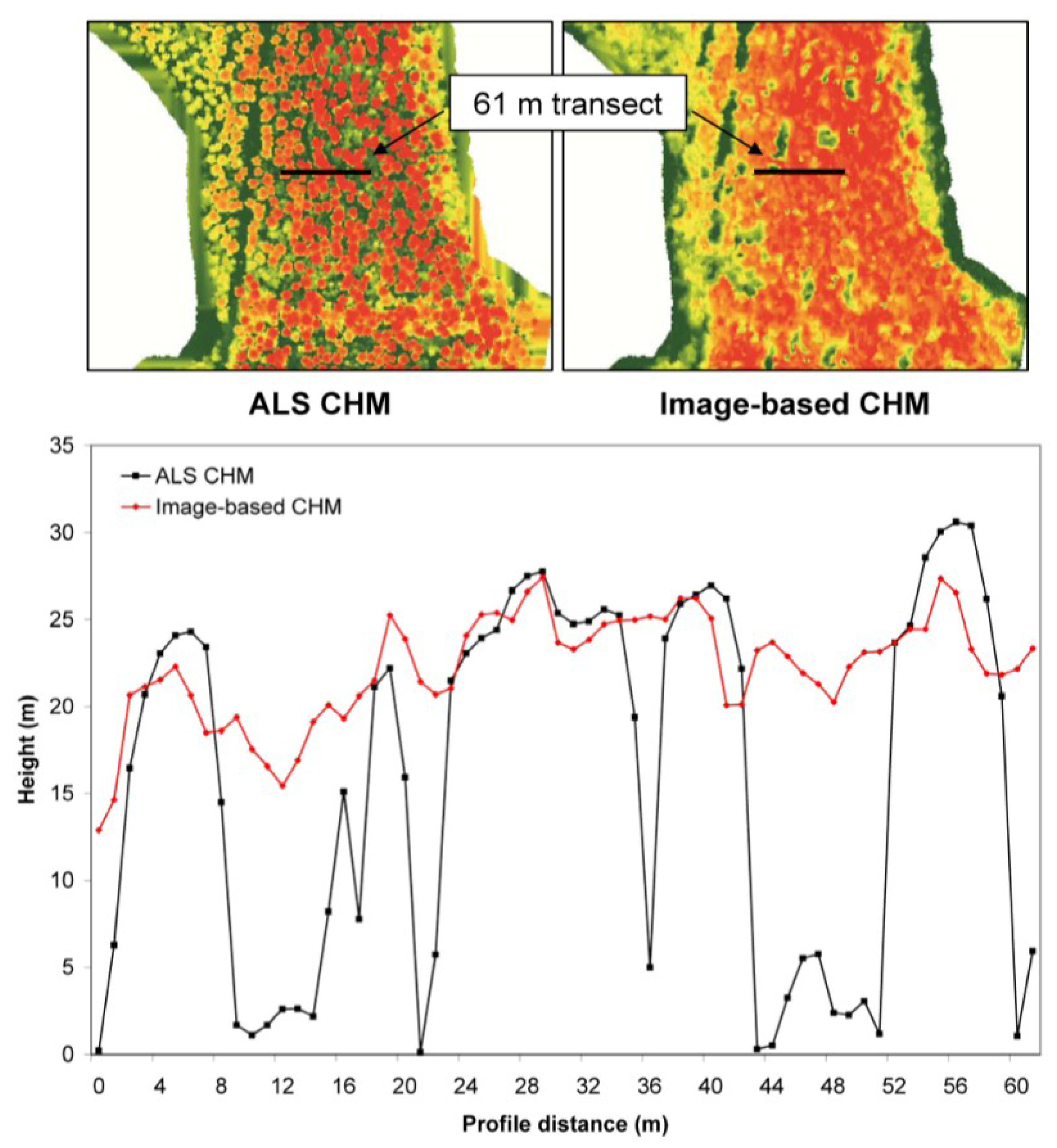
| Outputs | ALS Imagery | Imagery is limited to the production of a DSM. Imagery only provides measures for the canopy surface as visible from the air. ALS can penetrate the forest canopy and provides measurements from the canopy through to the ground surface, enabling the generation of DEMs, DSMs, and CHMs. The advantage of imagery is that it enables stand delineation and visual interpretation of species and other attributes that cannot (at this time) be derived from the ALS. | Baltsavias, 1999 [47] Bohlin et al., 2012 [8] Järnstedt et al., 2012 [9] |
| PRODUCTS | |||
| Resolution | Imagery | Much greater point densities are attainable with imagery than with ALS for a given cost, owing to smaller GSDs and image overlap that enables a large number of independent three-dimensional pixel matches. The higher density of points may enable a better representation of discontinuities. | Leberl
et al., 2010 [7] Baltsavias, 1999 [47] |
| Accuracy | ALS | Accuracies are comparable between ALS and imagery for well-defined surfaces. More direct comparisons of canopy heights and other inventory metrics derived from the two data sources are required in a range of forest environments. The higher density of points in image-based point clouds does not necessarily result in greater vertical accuracies | Haala
et al., 2010 [47] Leberl et al., 2010 [7] |
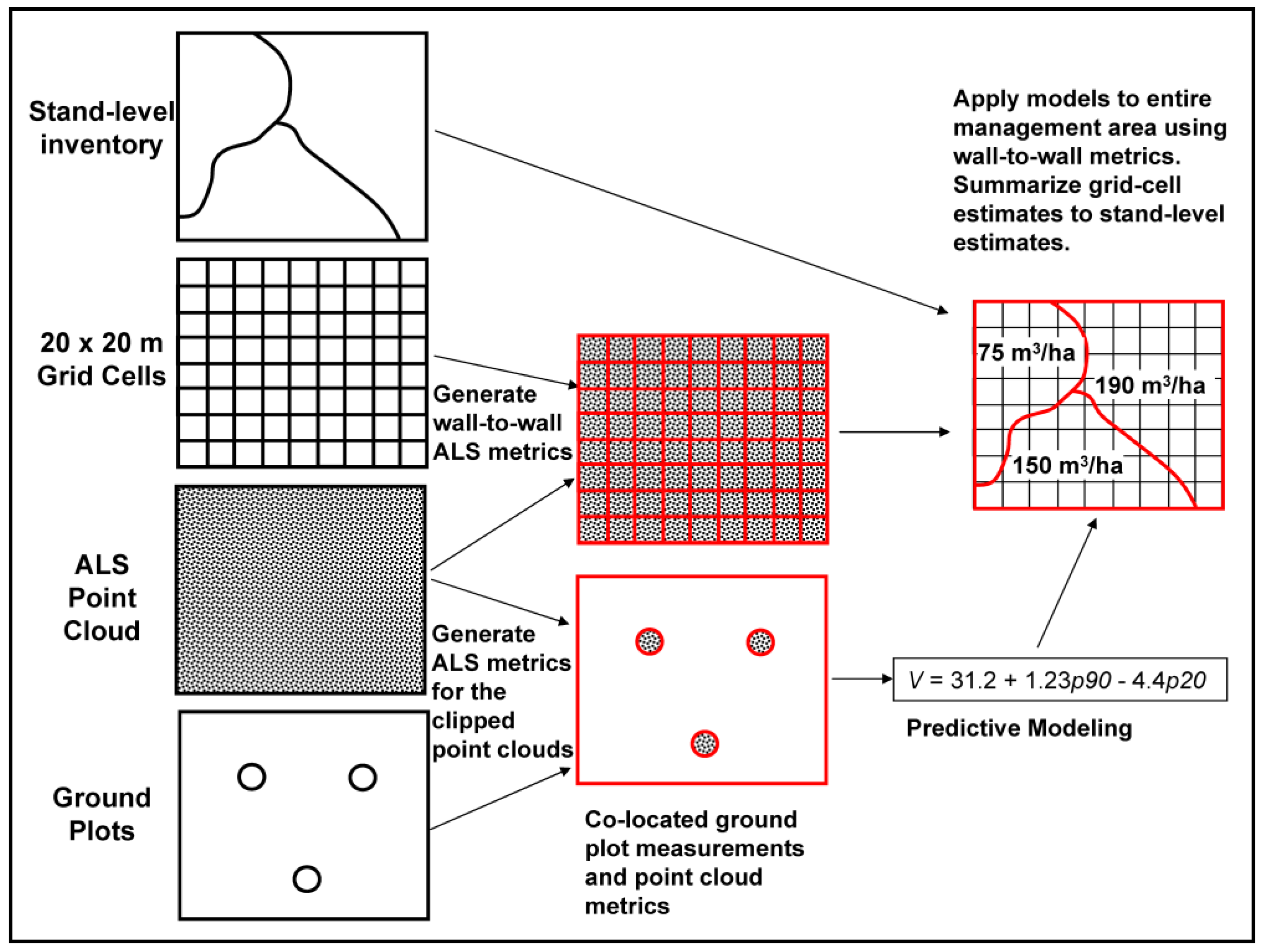
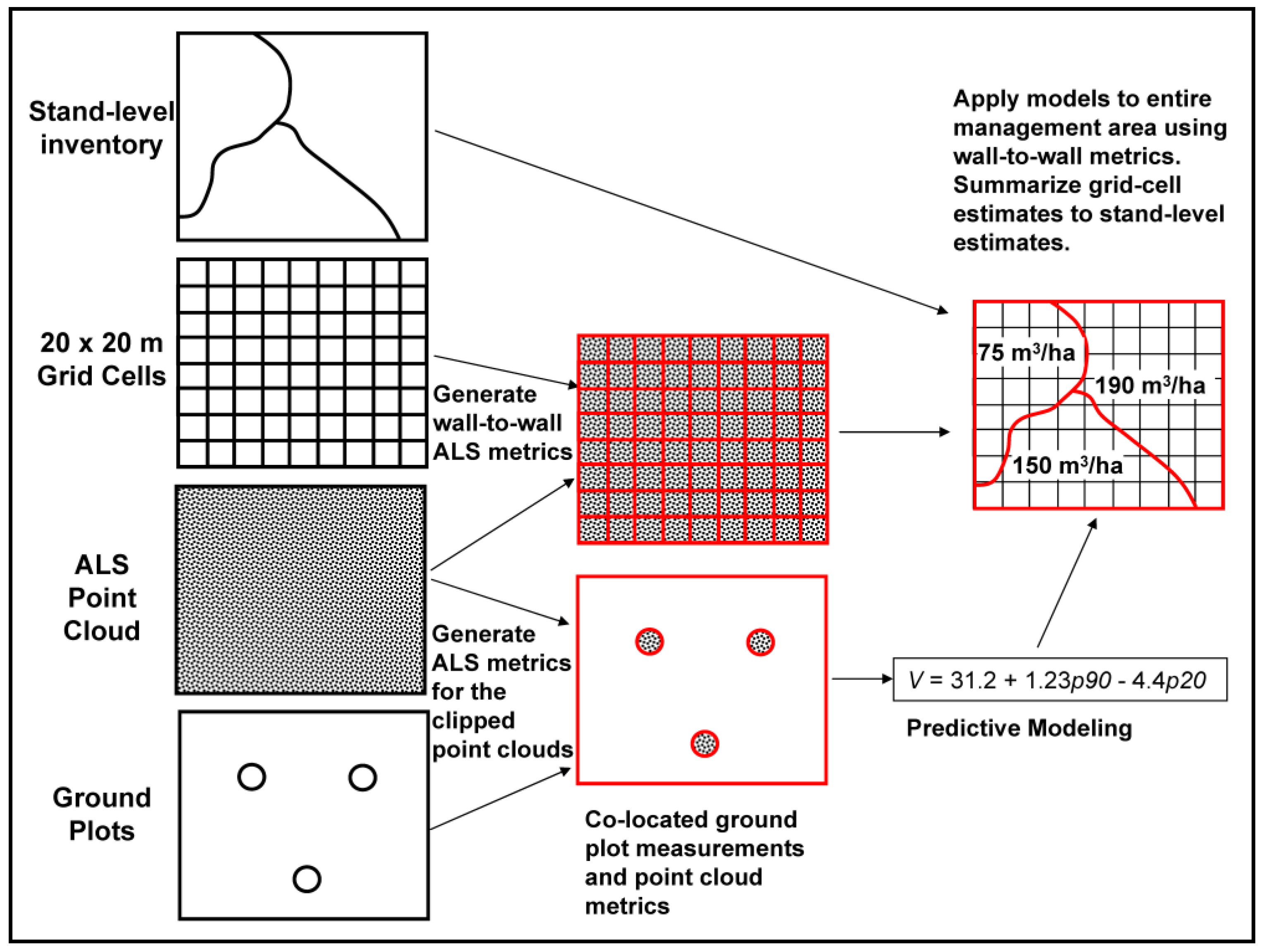
4.2. Area-Based Approach for Estimating Forest Inventory Attributes
| Forest Inventory Attributes | Bohlin et al., 2012 [8] | Järnstedt et al., 2012 [9] | ||
|---|---|---|---|---|
| Image | ALS Holmgren (2004) [17] | Image | ALS | |
| Mean Height | 8.8% | 3% | 28.2% | 18.6% |
| Dominant Height | N/A | N/A | 18.2% | 11.8% |
| Basal Area | 14.9% | 11% | 36.2% | 27.9% |
| Volume | 13.1% | 10% | 40.4% | 31.3% |
| Diameter | N/A | N/A | 33.7% | 25.3% |
4.3. Cost
5. Summary and Conclusions
Acknowledgments
Conflict of Interest
References
- Van Leeuwen, M.; Nieuwenhuis, M. Retreival of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Wulder, M.A.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; Andersen, H.-E.; McGaughey, R.J. Light detection and ranging (LIDAR): An emerging tool for multiple resource inventory. J. For. 2005, 103, 286–292. [Google Scholar]
- Evans, D.L.; Roberts, S.D.; Parker, R.C. LiDAR–A new tool for forest measurements. For. Chron. 2006, 62, 211–219. [Google Scholar]
- Wulder, M.A.; Bater, C.W.; Coops, N.C.; Hilker, T.; White, J.C. The role of LiDAR in sustainable forest management. For. Chron. 2008, 84, 807–826. [Google Scholar]
- Hyyppä, J.; Hyyppä, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar] [CrossRef]
- Leberl, F.; Irschara, A.; Pock, T.; Meixner, P.; Gruber, M.; Scholz, S.; Wiechert, A. Point clouds: LiDAR versus three-dimensional vision. Photogramm. Eng. Remote Sens. 2010, 76, 1123–1134. [Google Scholar]
- Bohlin, J.; Wallerman, J.; Fransson, J.E.S. Forest variable estimation using photogrammetric matching of digital aerial images in combination with a high-resolution DEM. Scand. J. For. Res. 2012, 27, 692–699. [Google Scholar] [CrossRef]
- Järnstedt, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Holopainen, M.; Viitala, R. Forest variable estimation using a high-resolution digital surface model. ISPRS J. Photogramm. Remote Sens. 2012, 74, 78–84. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.; Persson, Å.; Söderman, U. Laser scanning of forest resources: The Nordic experience. Scand. J. For. Res. 2004, 19, 482–499. [Google Scholar] [CrossRef]
- Stoker, J.M. Are we moving past the pixel? The third dimension in national landscape mapping. Photogramm. Eng. Remote Sens. 2013, 79, 133–134. [Google Scholar]
- Wulder, M.A.; White, J.C.; Bater, C.W.; Coops, N.C.; Hopkinson, C.; Chen, G. Lidar plots—A new large-area data collection option: Context, concepts, and case study. Can. J. Remote Sens. 2012, 38, 600–618. [Google Scholar] [CrossRef]
- Hyyppä, J.; Inkinen, M. Detecting and estimating attributes for single trees using laser scanner. Photogramm. J. Finl. 1999, 16, 27–42. [Google Scholar]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Næsset, E.; Bjerknes, K.-O. Estimating tree heights and number of stems in young forest stands using airborne laser scanner data. Remote Sens. Environ. 2001, 78, 328–340. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Baldwin, K.; Morrison, I.; Green, J. Lidar remote sensing of biophysical properties of tolerant northern hardwood forests. Can. J. Remote Sens. 2003, 29, 658–678. [Google Scholar] [CrossRef]
- Holmgren, J. Prediction of tree height, basal area, and stem volume in forest stands using airborne laser scanning. Scand. J. For. Res. 2004, 19, 543–553. [Google Scholar] [CrossRef]
- Corona, P.; Fattorini, L. Area-based lidar-assisted estimation of forest standing volume. Can. J. For. Res. 2008, 38, 2911–2916. [Google Scholar] [CrossRef]
- Rooker Jensen, J.L.; Humes, K.S.; Conner, T.; Williams, C.J.; DeGroot, J. Estimation of biophysical characteristics for highly variable mixed-conifer stands using small-footprint LiDAR. Can. J. For. Res. 2006, 36, 1129–1138. [Google Scholar] [CrossRef]
- Hawbaker, T.J.; Gobakken, T.; Lesak, A.; Trømborg, E.; Contrucci, K.; Radeloff, V. Light detection and ranging-based measures of mixed hardwood forest structure. For. Sci. 2010, 56, 313–326. [Google Scholar]
- Woods, M.; Pitt, D.; Penner, M.; Lim, K.; Nesbitt, D.; Etheridge, D.; Treitz, P. Operational implementation of a LiDAR inventory in boreal Ontario. For. Chron. 2011, 87, 512–528. [Google Scholar]
- Lindberg, E.; Hollaus, M. Comparison of methods for estimation of stem volume, stem number, and basal area from airborne laser scanning data in a hemi-boreal forest. Remote Sens. 2012, 4, 1004–1023. [Google Scholar] [CrossRef]
- Nord-Larsen, T.; Schumacher, J. Estimation of forest resources from a country-wide laser scanning survey and national forest inventory data. Remote Sens. Environ. 2012, 119, 148–157. [Google Scholar] [CrossRef]
- Næsset, E. Airborne laser scanning as a method in operational forest inventory: Status of accuracy assessments accomplished in Scandinavia. Scand. J. For. Res. 2007, 22, 433–442. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—An introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar]
- Dubayah, R.O.; Drake, J.B. LiDAR remote sensing for forestry. J. For. 2000, 98, 44–46. [Google Scholar]
- Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.-E.; Carson, W.W. Accuracy of a high-resolution lidar terrain model under a conifer forest canopy. Can. J. Remote Sens. 2003, 29, 527–535. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; McGaughey, R.J. LiDAR: An emerging tool for multiple resource measurement, planning, and monitoring. West. For. 2008, 53, 1–2. [Google Scholar]
- Magnusson, M.; Fransson, J.E.S.; Holmgren, J. Effects on estimation accuracy of forest variables using different pulse density of laser data. For. Sci. 2007, 53, 619–626. [Google Scholar]
- Treitz, P.; Lim, K.; Woods, M.; Pitt, D.; Nesbitt, D.; Etheridge, D. LiDAR sampling density for forest resource inventories in Ontario, Canada. Remote Sens. 2012, 4, 830–848. [Google Scholar] [CrossRef]
- Jakubowski, M.K.; Guo, Q.; Kelly, M. Tradeoffs between lidar pulse density and forest measurement accuracy. Remote Sens. Environ. 2013, 130, 245–253. [Google Scholar] [CrossRef]
- Gatziolis, D.; Fried, J.S.; Monleon, V.S. Challenges to estimating tree height via LiDAR in closed-canopy forests: A parable from western Oregon. For. Sci. 2010, 56, 139–155. [Google Scholar]
- Tinkham, W.T.; Smith, A.M.S.; Hoffman, C.; Hudak, A.T.; Falkowski, M.J.; Swanson, M.E.; Gessler, P.E. Investigating the influence of LiDAR ground surface errors on the utility of derived forest inventories. Can. J. For. Res. 2012, 42, 413–422. [Google Scholar] [CrossRef]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef]
- McGaughey, R.J. FUSION/LDV: Software for LiDAR Data Analysis and Visualization. February 2013–FUSION Version 3.30. USDA Forest Service, Pacific Northwest Research Station, University of Washington: Seattle, WA, USA, 2013. Available online: http://www.forsys.cfr.washington.edu/fusion/FUSION_manual.pdf (accessed on 15 May 2013).
- Lillesand, T.M.; Kiefer, R.W. Remote Sensing and Image Interpretation, 2nd ed.; John Wiley and Sons: New York, NY, USA, 1987. [Google Scholar]
- Korpela, I. Individual tree measurements by means of digital aerial photogrammetry. Silva Fennica Monogr. 2004, 3, 93. [Google Scholar]
- Gagnon, P.A.; Agnard, J.P.; Nolette, C. Evaluation of a soft-copy photogrammetry system for tree plot measurements. Can. J. For. Res. 1993, 23, 1781–1785. [Google Scholar] [CrossRef]
- Hall, R.J. The Roles of Aerial Photographs in Forestry Remote Sensing Image Analysis. In Remote Sensing of Forest Environments: Concepts and Case Studies; Wulder, M.A., Franklin, S.E., Eds.; Kluwer Academic Publishers: London, UK, 2003; pp. 47–77. [Google Scholar]
- Zitová, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef]
- Baltsavias, E.; Gruen, A.; Eisenbeiss, H.; Zhang, L.; Waser, L.T. High-quality image matching and automated generation of three-dimensional tree models. Int. J. Remote Sens. 2008, 29, 1243–1259. [Google Scholar] [CrossRef]
- Haala, N.; Hastedt, H.; Wolf, K.; Ressl, C.; Baltrusch, S. Digital photogrammetric camera evaluation—Generation of digital elevation models. Photogramm Fernerkun. 2010, 2, 99–115. [Google Scholar]
- Gehrke, S.; Morin, K.; Downey, M.; Boehrer, N.; Fuchs, T. Semi-Global Matching: An Alternative to LiDAR for DSM Generation? In Proceedings of the 2010 Canadian Geomtics Conference and Symposium of Commission I, ISPRS Convergence in Geomatics–Shaping Canada’s Competitive Landscape, Calgary, Canada, 15–18 June 2010; Available online: http://www.isprs.org/proceedings/XXXVIII/part1/11/11_01_Paper_121.pdf (accessed on 21 January 2013).
- Hirshmüller, H. Stereo processing by semi-global matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef]
- St-Onge, B.; Vega, C.; Fournier, R.A.; Hu, Y. Mapping canopy height using a combination of digital stereo-photogrammetry and lidar. Int. J. Remote Sens. 2008, 29, 3343–3364. [Google Scholar]
- Zimble, D.A.; Evans, D.L.; Carlson, G.C.; Parker, R.C.; Grado, S.C.; Gerard, P.D. Characterizing vertical forest structure using small-footprint airborne LiDAR. Remote Sens. Environ. 2003, 87, 171–182. [Google Scholar] [CrossRef]
- Baltsavias, E. A comparison between photogrammetry and laser scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Lim, K.; Hopkinson, C.; Treitz, P. Examining the effects of sampling point densities on laser canopy height and density metrics. For. Chron. 2008, 84, 876–885. [Google Scholar]
- Hodgson, M.E.; Bresnahan, P. Accuracy of airborne lidar-derived elevation: Empirical assessment and error budget. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar]
- Persson, A.; Holmgren, J.; Soderman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remote Sens. 2002, 68, 925–932. [Google Scholar]
- Andersen, H.E.; Reutebuch, S.E.; McGaughey, R.J. A rigorous assessment of tree heigh measurements obtained using airborne lidar and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef]
- Næsset, E. Determination of mean tree height of forest stands using airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1997, 52, 49–56. [Google Scholar] [CrossRef]
- Magnussen, S.; Boudewyn, P. Derivations of stand heights from airborne laser scanner data with canopy-based quantile estimators. Can. J. For. Res. 1998, 28, 1016–1031. [Google Scholar] [CrossRef]
- Magnussen, S.; Eggermont, P.; LaRiccia, V. Recovering tree heights from airborne laser scanner data. For. Sci. 1999, 45, 407–422. [Google Scholar]
- Næsset, E.; Økland, T. Estimating tree height and tree crown properties using airborne scanning laser in a boreal nature reserve. Remote Sens. Environ. 2002, 79, 105–115. [Google Scholar] [CrossRef]
- Maltamo, M.; Eerikäinen, K.; Packalén, P.; Hyyppä, J. Estimation of stem volume using laser scanning-based canopy height metrics. Forestry 2006, 79, 217–230. [Google Scholar] [CrossRef]
- Coops, N.C.; Hilker, T.; Wulder, M.A.; St-Onge, B.; Newnham, G.; Siggins, A.; Trofymow, J.A. Estimating canopy structure of douglas-fir forest stands from discrete-return LiDAR. Trees 2007, 21, 295–310. [Google Scholar]
- Pitt, D.; Pineau, J. Forest inventory research at the Canadian Wood Fibre Centre: Notes from a research coordination workshop, 3–4 June 2009, Point Claire, QC. For. Chron. 2009, 85, 859–869. [Google Scholar]
- Eid, T.; Gobakken, T.; Næsset, E. Comparing stand inventories for large areas based on photo-interpretation and laser scanning by means of cost-plus-loss analyses. Scand. J. For. Res. 2004, 19, 512–523. [Google Scholar] [CrossRef]
- White, B.; Ogilvie, J.; Campbell, D.M.H.; Hiltz, D.; Gauthier, B.; Chisholm, H.K.; Wen, H.K.; Murphy, P.N.C.; Arp, P.A. Use of a cartographic depth-to-water index to locate small streams and associated wet areas across landscapes. Can. Water Resour. J. 2012, 37, 333–347. [Google Scholar] [CrossRef]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
White, J.C.; Wulder, M.A.; Vastaranta, M.; Coops, N.C.; Pitt, D.; Woods, M. The Utility of Image-Based Point Clouds for Forest Inventory: A Comparison with Airborne Laser Scanning. Forests 2013, 4, 518-536. https://doi.org/10.3390/f4030518
White JC, Wulder MA, Vastaranta M, Coops NC, Pitt D, Woods M. The Utility of Image-Based Point Clouds for Forest Inventory: A Comparison with Airborne Laser Scanning. Forests. 2013; 4(3):518-536. https://doi.org/10.3390/f4030518
Chicago/Turabian StyleWhite, Joanne C., Michael A. Wulder, Mikko Vastaranta, Nicholas C. Coops, Doug Pitt, and Murray Woods. 2013. "The Utility of Image-Based Point Clouds for Forest Inventory: A Comparison with Airborne Laser Scanning" Forests 4, no. 3: 518-536. https://doi.org/10.3390/f4030518
APA StyleWhite, J. C., Wulder, M. A., Vastaranta, M., Coops, N. C., Pitt, D., & Woods, M. (2013). The Utility of Image-Based Point Clouds for Forest Inventory: A Comparison with Airborne Laser Scanning. Forests, 4(3), 518-536. https://doi.org/10.3390/f4030518