
Effects of Illumination Conditions on Individual Tree Height Extraction Using UAV LiDAR: Pilot Study of a Planted Coniferous Stand



Abstract
1. Introduction
2. Study Site and Data
2.1. Study Site
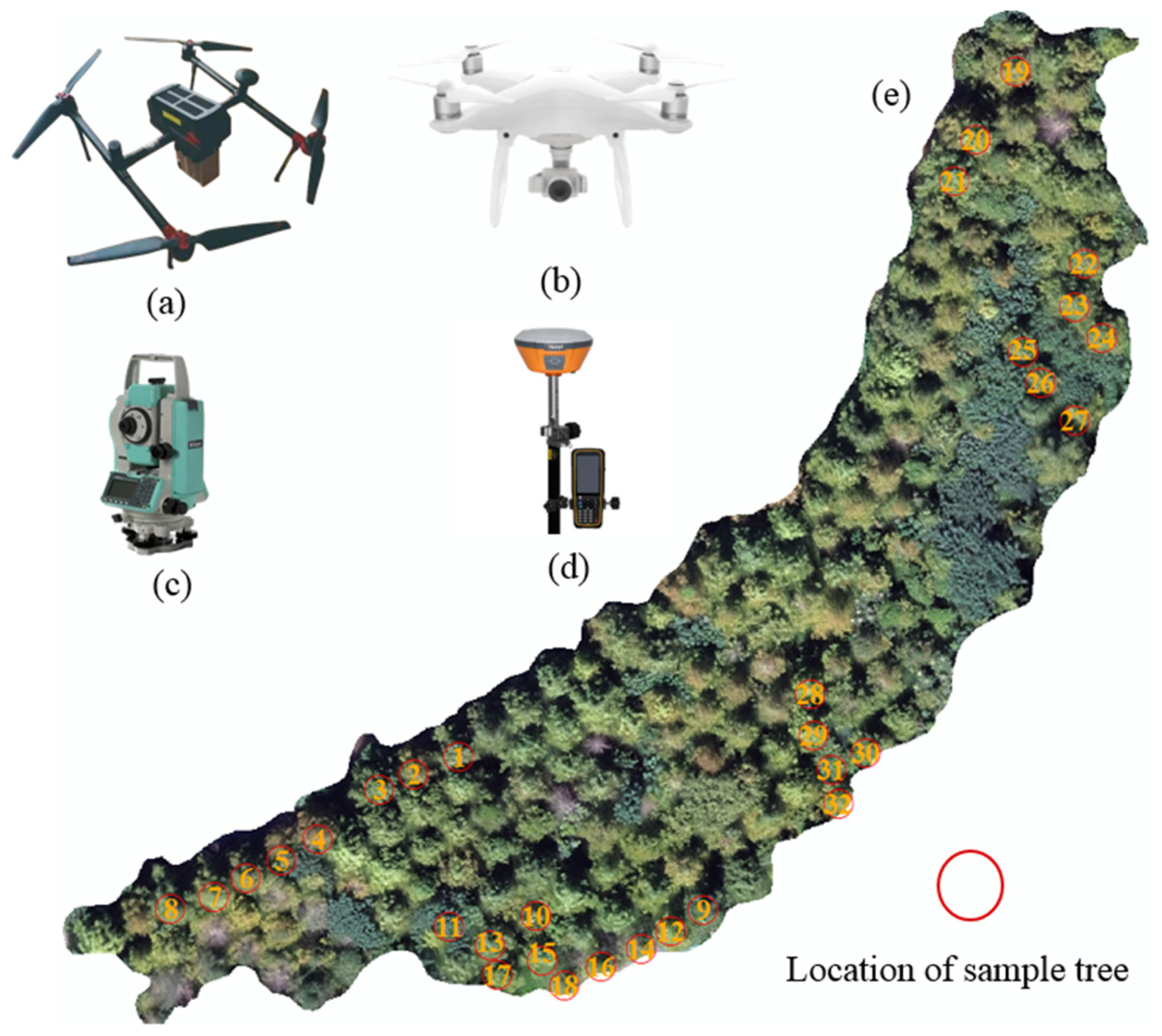
2.2. Data
2.2.1. Point Clouds Scanned under Different Illumination Conditions
2.2.2. In Situ Measured Tree Heights
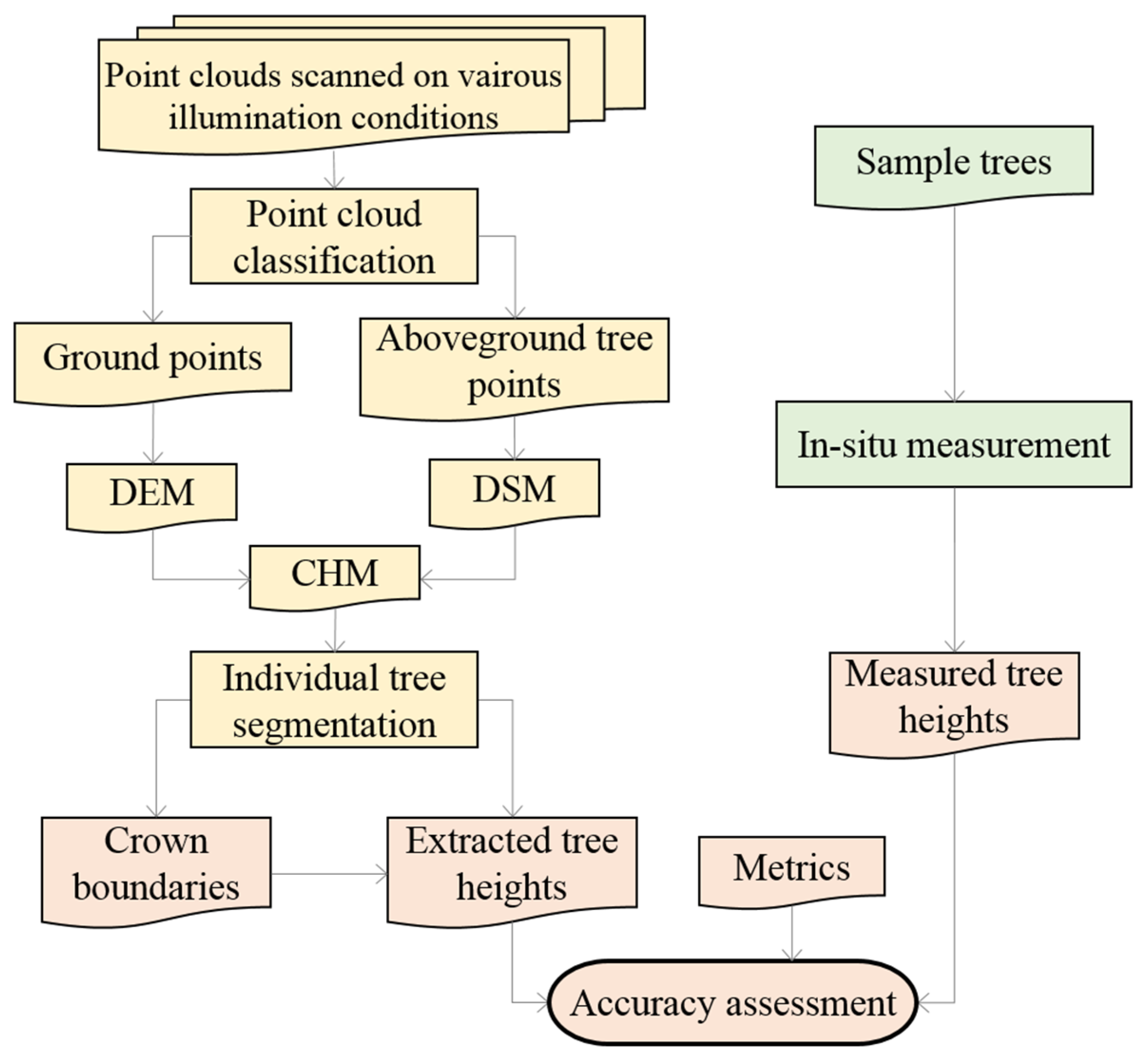
3. Methods
3.1. Point Cloud Classification
3.2. CHM Creation
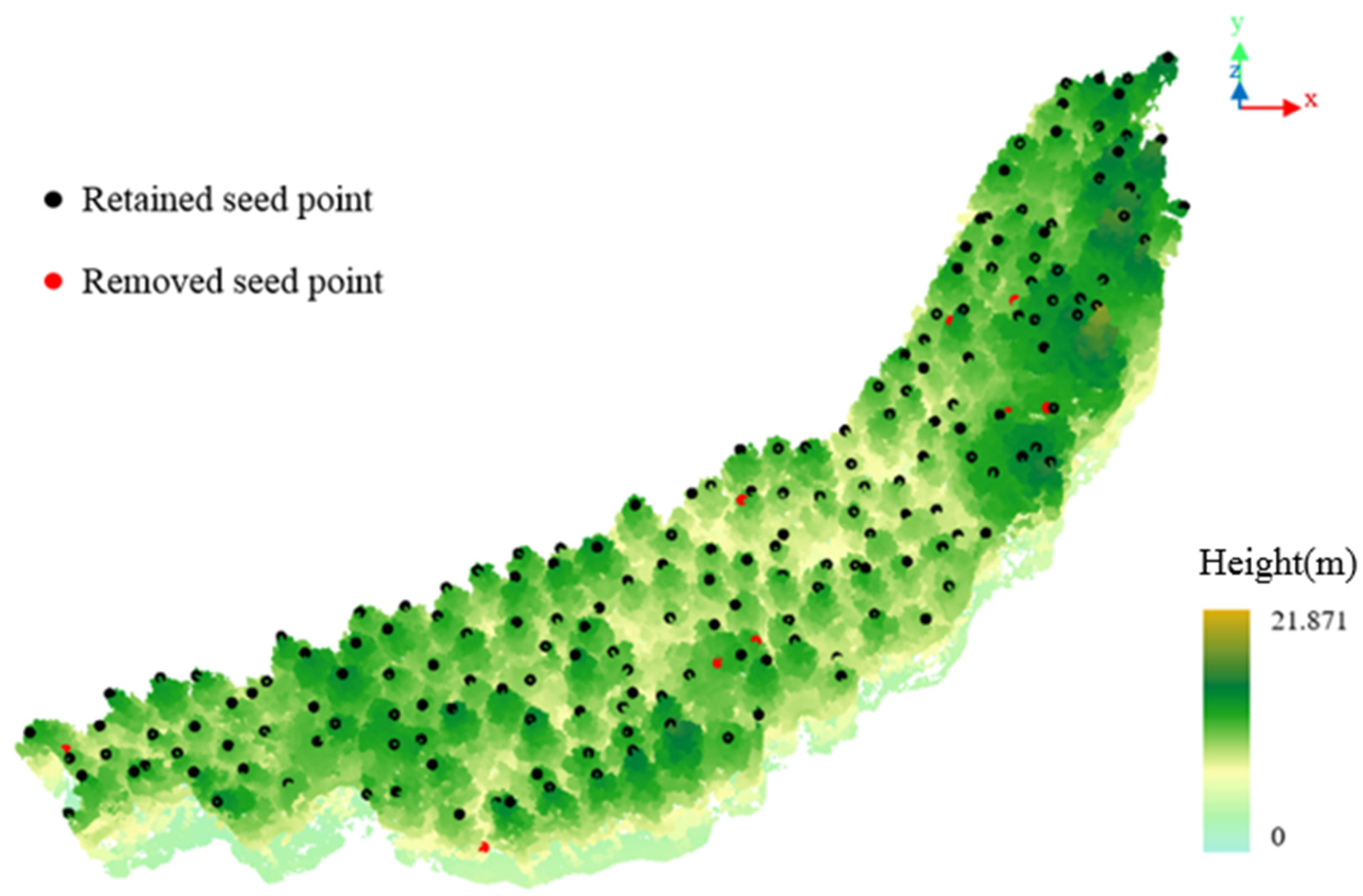
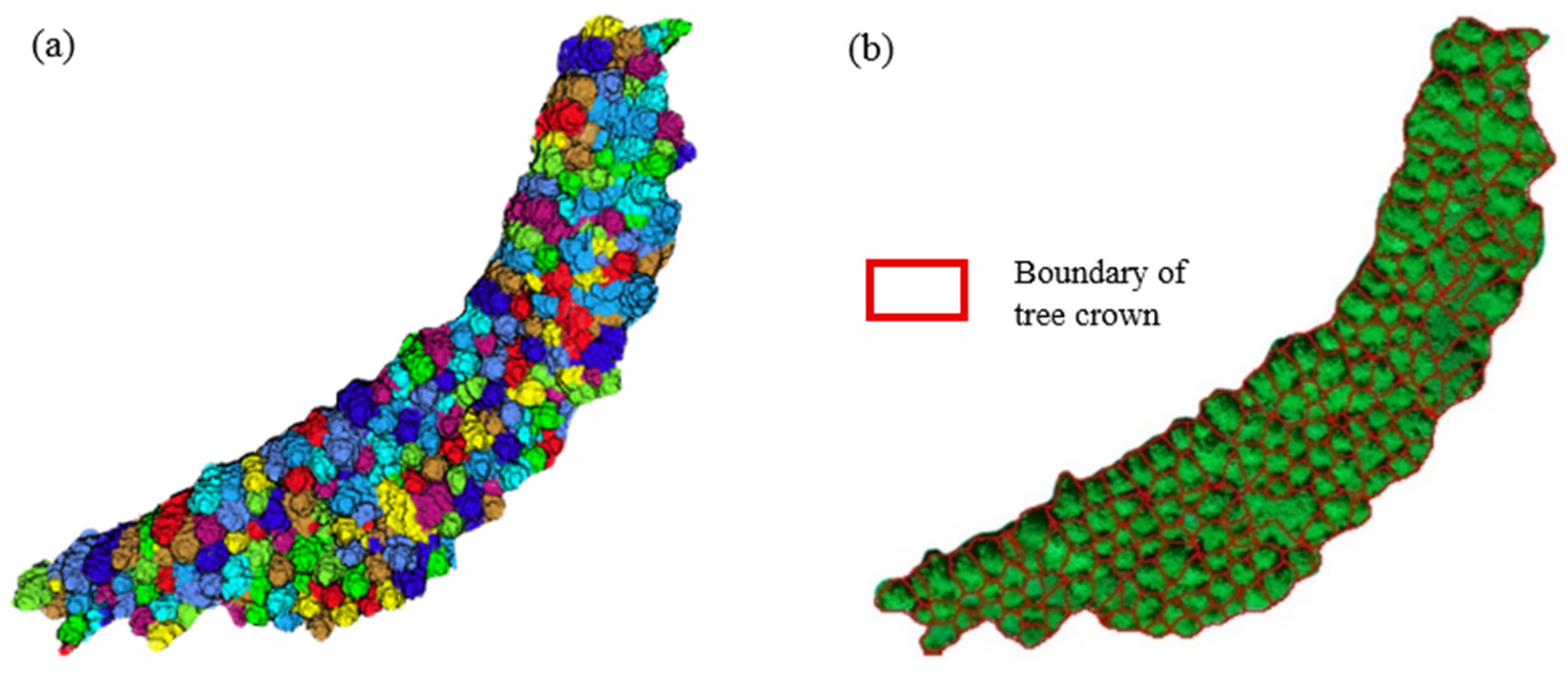
3.3. Individual Tree Segmentation and Height Extraction
3.4. Metrics for Accuracy Assessment
4. Results
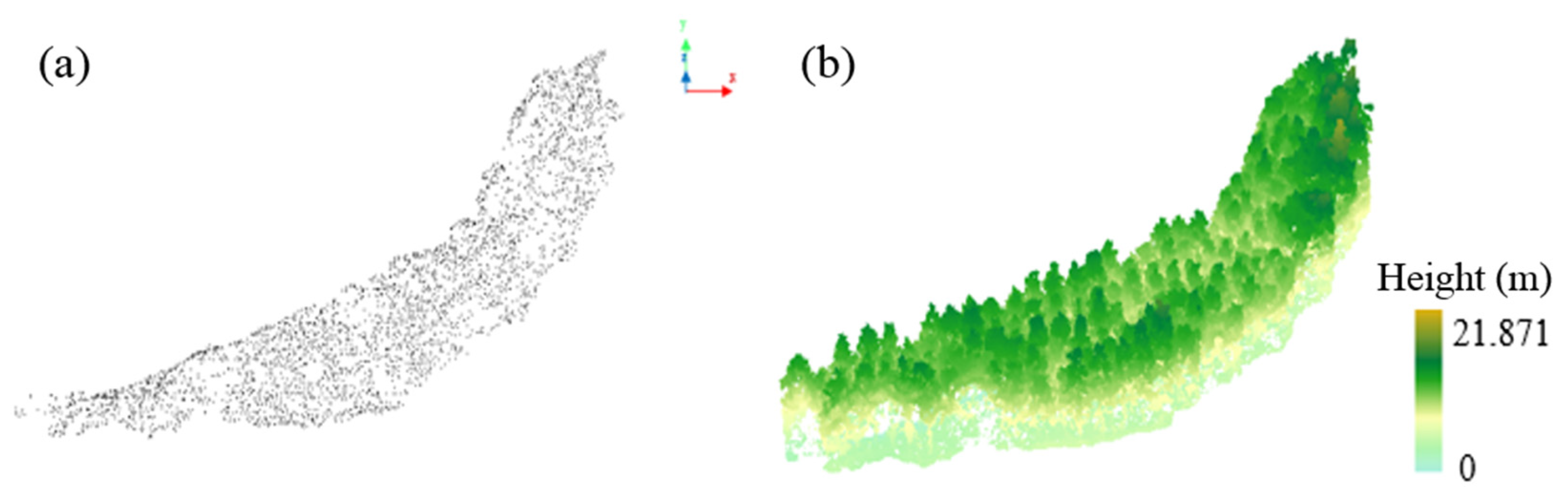
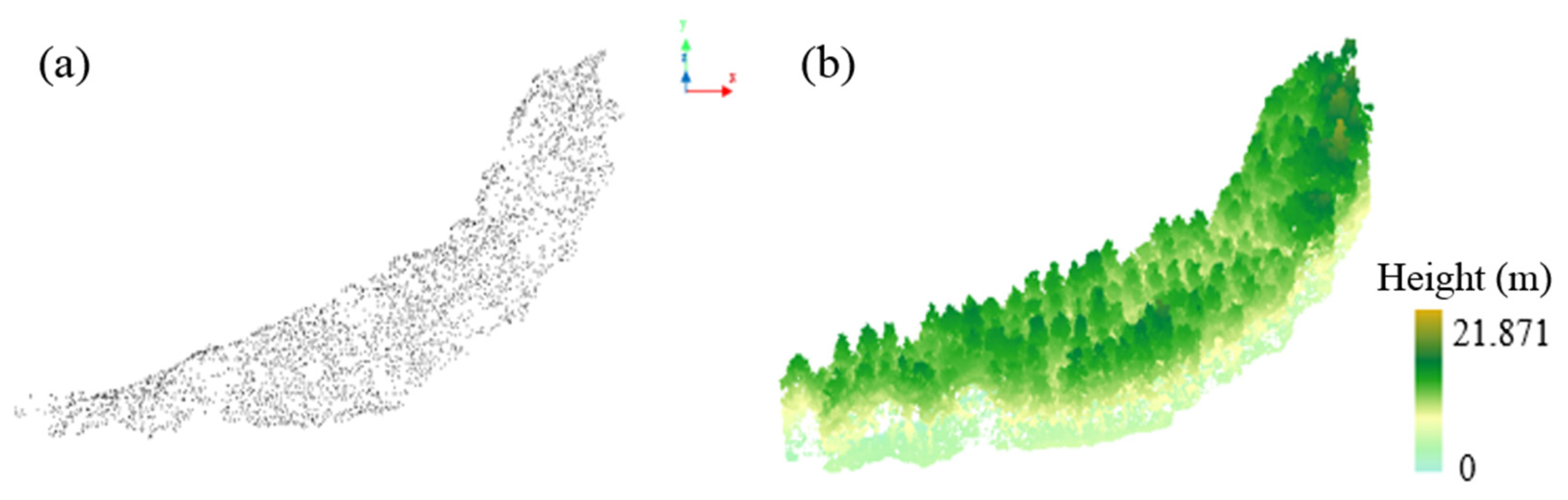
4.1. Classified Point Clouds
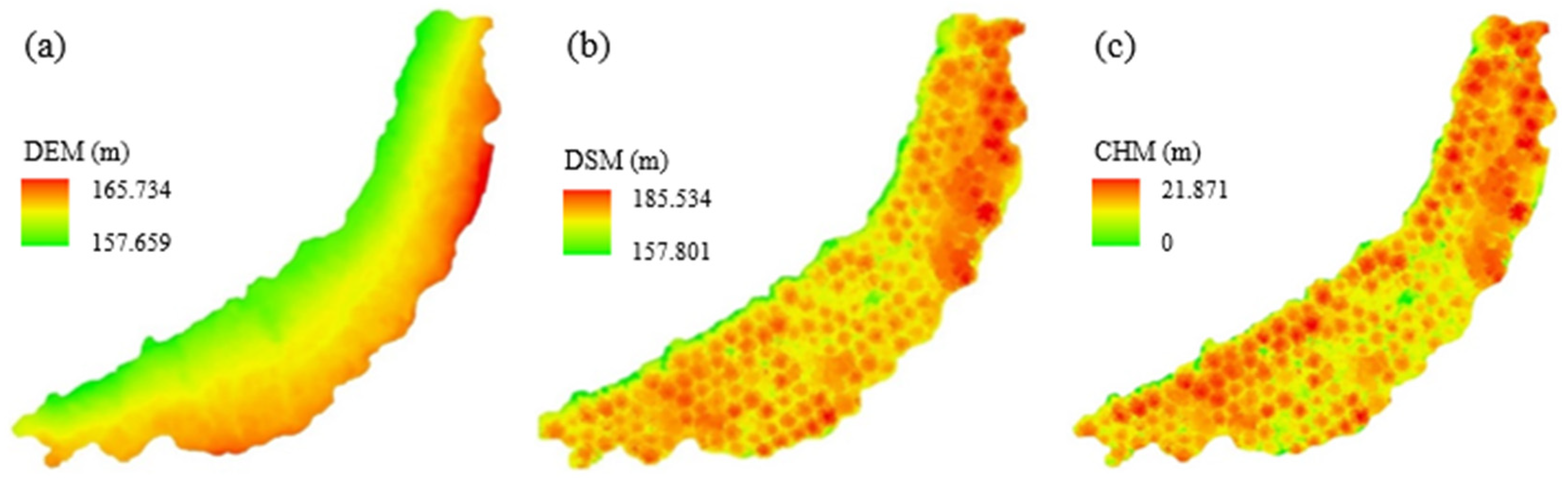
4.2. Created CHM
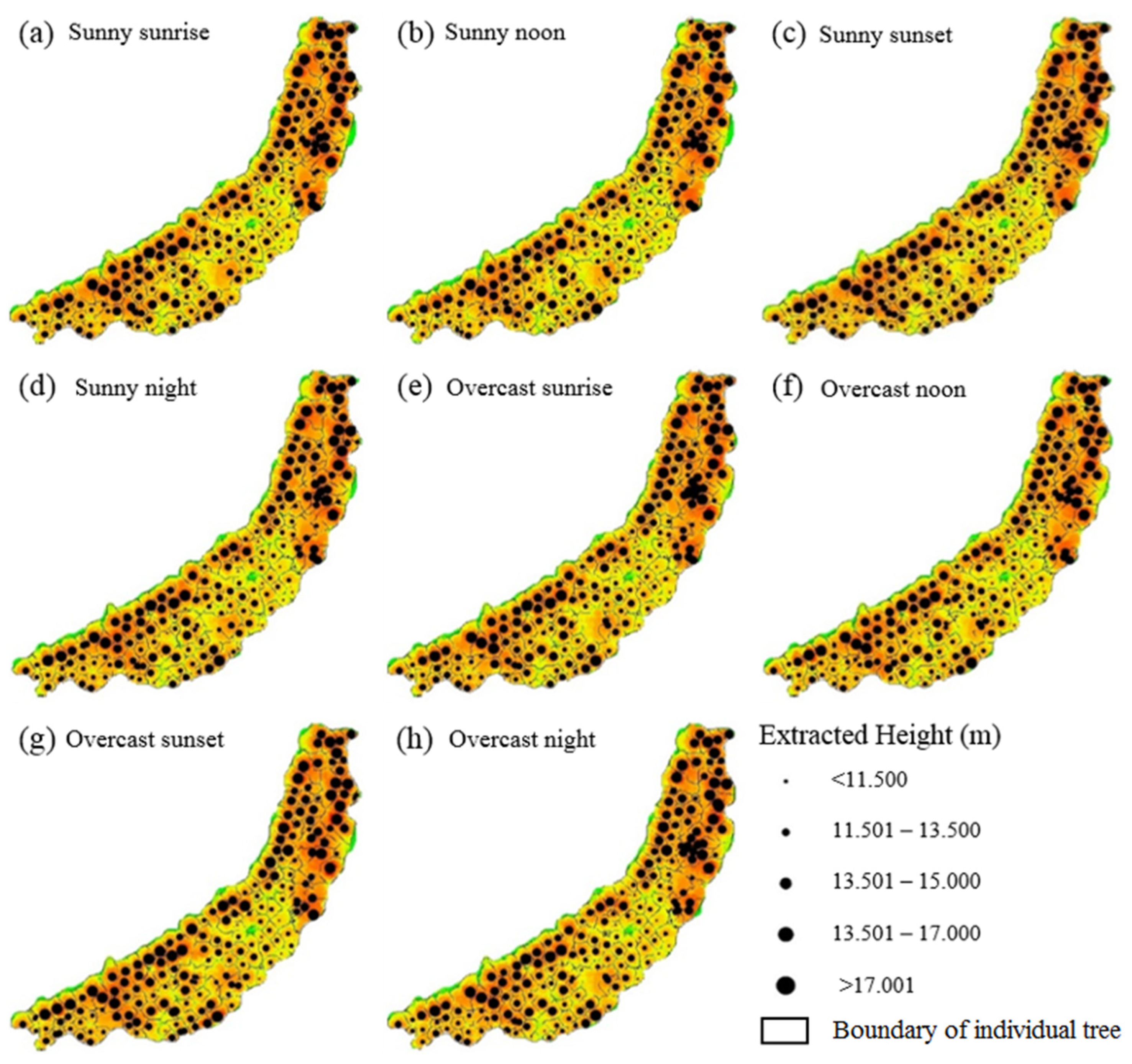
4.3. Extracted Individual Trees and Heights
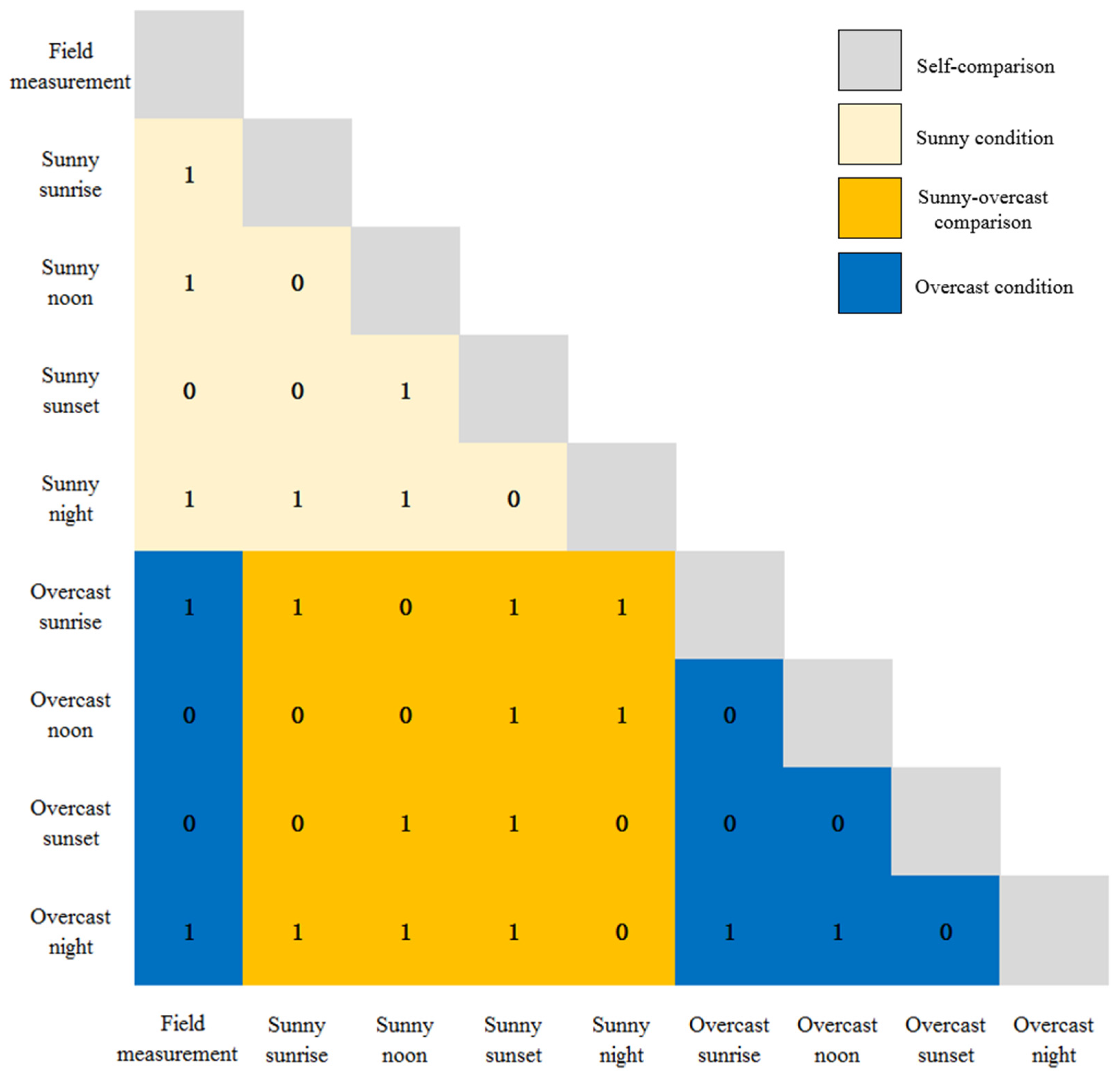
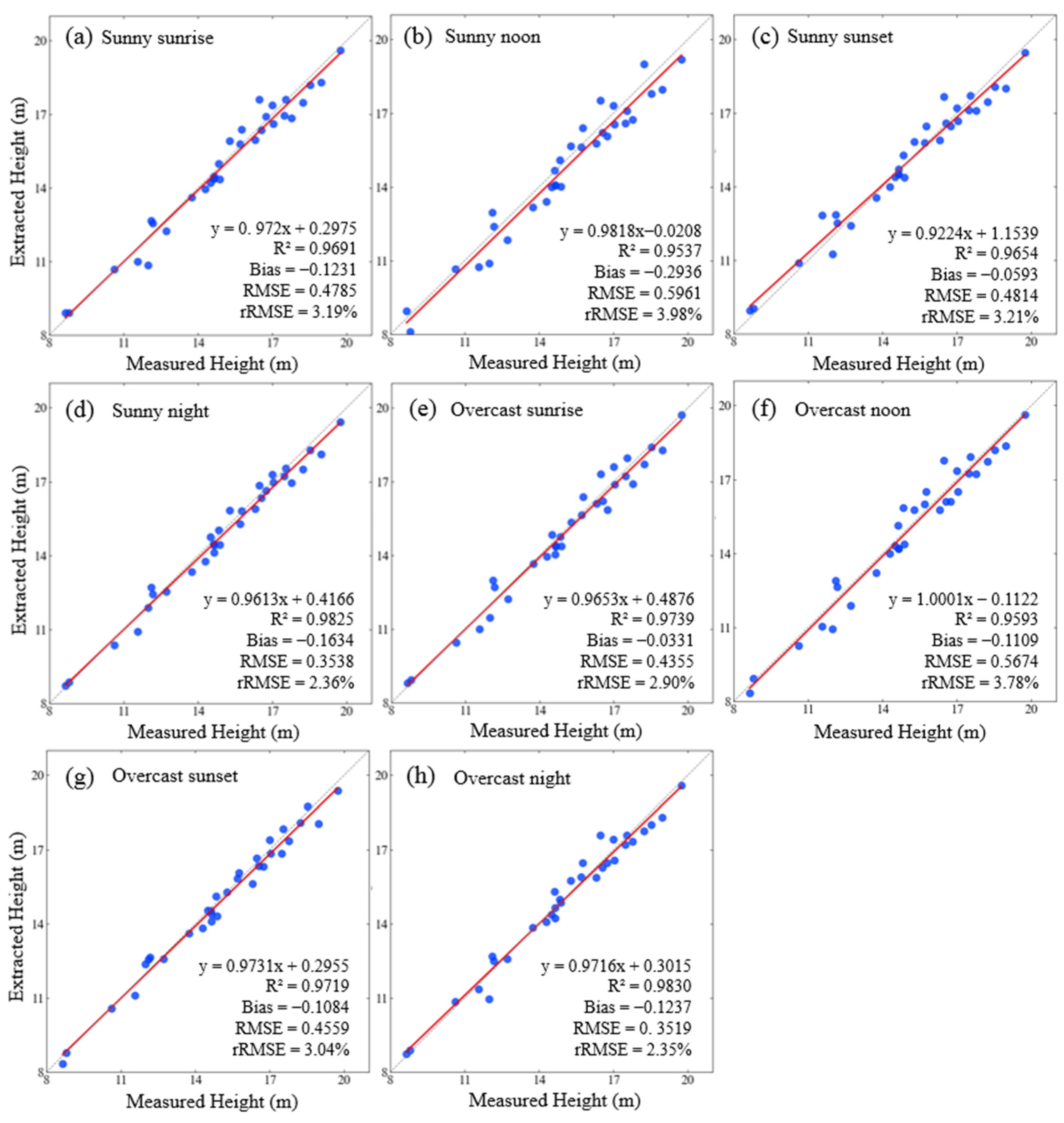
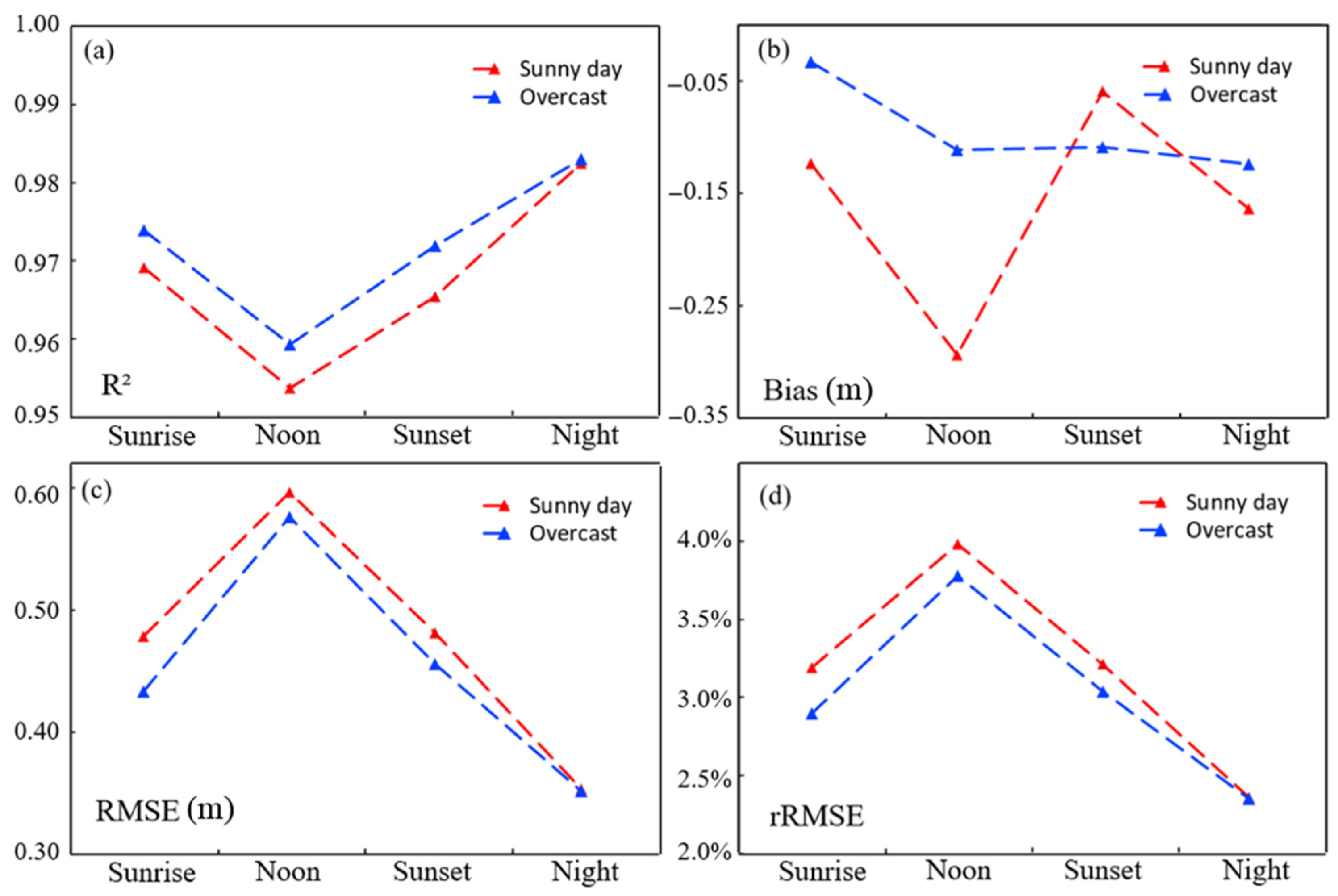
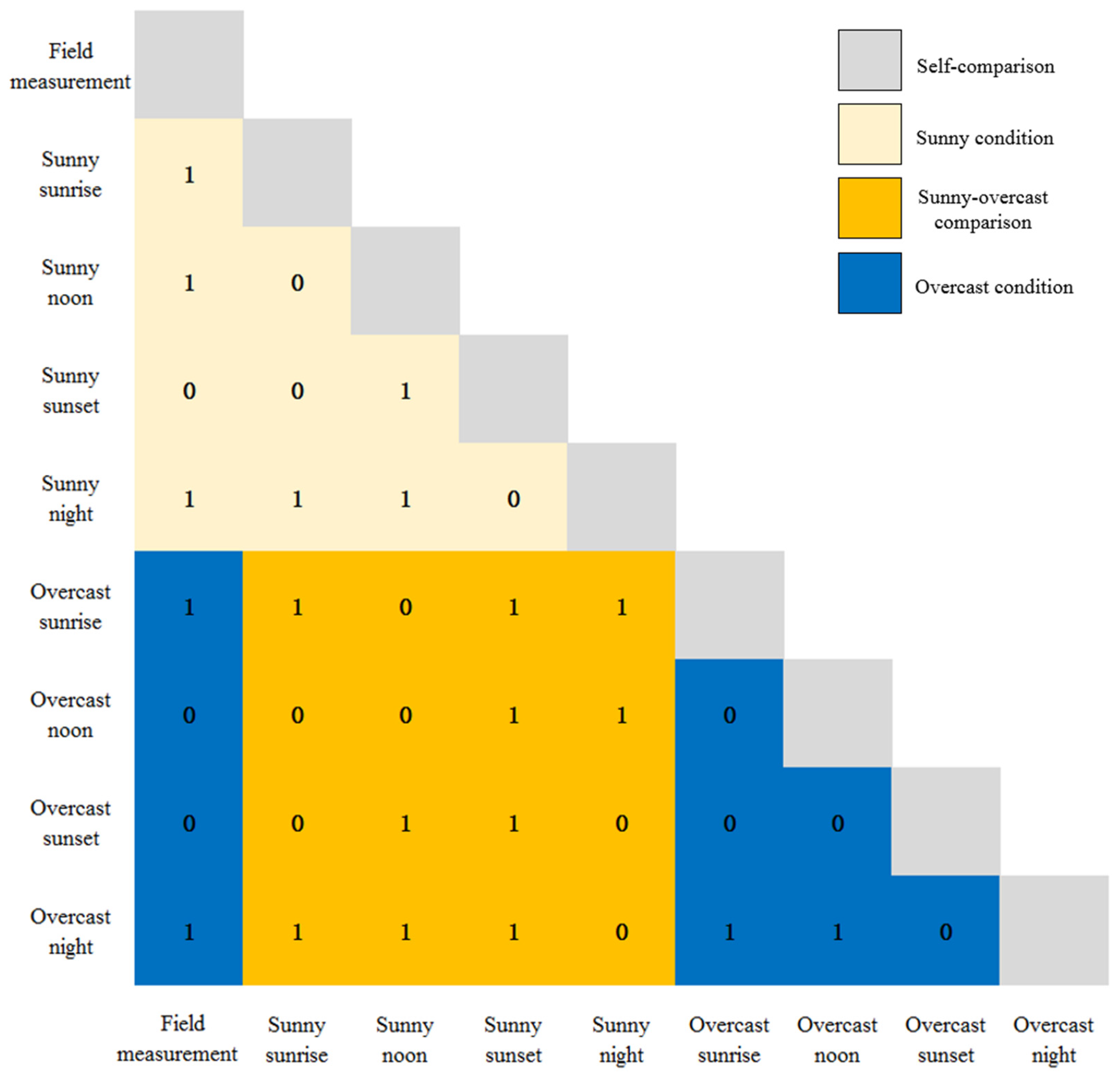
4.4. Accuracy Assessment
5. Discussion
5.1. How Does Solar Radiation Impact on the Ranging Accuracy of UAV LiDAR?
5.2. Other Factors Affecting the Ranging Accuracy of UAV LiDAR
5.3. Limitations and Potential Improvements
6. Conclusions
- Individual tree heights extracted from the eight point clouds scanned by UAV LiDAR under various illumination conditions were of high accuracy. There were statistically significant differences in most pairs of tree height groups. The R2s were all above 0.95; the Biases had absolute values ranging from 0.05 to 0.3 m; the RMSEs were all less than 0.6 m; and the rRMSEs were all below 4%.
- The accuracy of individual tree height extraction had an inverse correlation with the intensity of illumination. The R2 and RMSEs of tree heights obtained in the overcast day were commonly better than those in the sunny day; the R2 and RMSEs at night were superior among all time points, while those at noon were poorest.
- To obtain more accurate tree heights for forestry applications, it is best to acquire point cloud using UAV LiDAR at night. If such a task has to be carried out during the day, it is better not to do so at noon.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Douss, R.; Farah, I.R. Extraction of Individual Trees Based on Canopy Height Model to Monitor the State of the Forest. Trees For. People 2022, 8, 100257. [Google Scholar] [CrossRef]
- Jurjević, L.; Liang, X.; Gašparović, M.; Balenović, I. Is field-measured tree height as reliable as believed—Part II, A comparison study of tree height estimates from conventional field measurement and low-cost close-range remote sensing in a deciduous forest. ISPRS J. Photogramm. Remote Sens. 2020, 169, 227–241. [Google Scholar] [CrossRef]
- Mulatu, K.A.; Decuyper, M.; Brede, B.; Kooistra, L.; Reiche, J.; Mora, B.; Herold, M. Linking Terrestrial LiDAR Scanner and Conventional Forest Structure Measurements with Multi-Modal Satellite Data. Forests 2019, 10, 291. [Google Scholar] [CrossRef]
- Dempewolf, J.; Nagol, J.; Hein, S.; Thiel, C.; Zimmermann, R. Measurement of Within-Season Tree Height Growth in a Mixed Forest Stand Using UAV Imagery. Forests 2017, 8, 231. [Google Scholar] [CrossRef]
- Tian, J.; Dai, T.; Li, H.; Liao, C.; Teng, W.; Hu, Q.; Ma, W.; Xu, Y. A Novel Tree Height Extraction Approach for Individual Trees by Combining TLS and UAV Image-Based Point Cloud Integration. Forests 2019, 10, 537. [Google Scholar] [CrossRef]
- Xu, D.; Wang, H.; Xu, W.; Luan, Z.; Xu, X. LiDAR Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, Challenges and Future Perspectives. Forests 2021, 12, 550. [Google Scholar] [CrossRef]
- Kwak, D.A.; Lee, W.K.; Lee, J.H.; Biging, G.S.; Gong, P. Detection of Individual Trees and Estimation of Tree Height Using LiDAR Data. J. For. Res. 2007, 12, 425–434. [Google Scholar] [CrossRef]
- Akay, A.E.; Oǧuz, H.; Karas, I.R.; Aruga, K. Using LiDAR Technology in Forestry Activities. Environ. Monit. Assess. 2009, 151, 117–125. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Zhao, C.; Zhang, H.; Zhang, Z.; Gui, K. A novel hybrid TOF/phase-shift method for absolute distance measurement using a falling-edge RF-modulated pulsed laser. Opt. Laser Technol. 2019, 114, 60–65. [Google Scholar] [CrossRef]
- Jiang, R.; Lin, J.; Li, T. Refined Aboveground Biomass Estimation of Moso Bamboo Forest Using Culm Lengths Extracted from TLS Point Cloud. Remote Sens. 2022, 14, 5537. [Google Scholar] [CrossRef]
- Zimble, D.A.; Evans, D.L.; Carlson, G.C.; Parker, R.C.; Grado, S.C.; Gerard, P.D. Characterizing vertical forest structure using small-footprint airborne LiDAR. Remote Sens. Environ. 2003, 87, 171–182. [Google Scholar] [CrossRef]
- Lafsky, M.A.; Harding, D.; Keller, M.; Cohen, W.B. Estimates of forest canopy height and aboveground biomass using ICESat. Geophys. Res. Lett. 2005, 32, L22S02. [Google Scholar] [CrossRef]
- Hamraz, H.; Contreras, M.A.; Zhang, J. Vertical stratification of forest canopy for segmentation of understory trees within small-footprint airborne LiDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2017, 130, 385–392. [Google Scholar] [CrossRef]
- Côté, J.F.; Fournier, R.A.; Frazer, G.W.; Niemann, K.O. A fine-scale architectural model of trees to enhance LiDAR-derived measurements of forest canopy structure. Agric. For. Meteorol. 2012, 166–167, 72–85. [Google Scholar] [CrossRef]
- Stovall, A.E.L.; Vorster, A.G.; Anderson, R.S.; Evangelista, P.H.; Shugart, H.H. Non-destructive aboveground biomass estimation of coniferous trees using terrestrial LiDAR. Remote Sens. Environ. 2017, 200, 31–42. [Google Scholar] [CrossRef]
- Lin, J.; Chen, Y.; Jiang, R.; Li, T. Exploratory Quantification of 3D Spatial Competition in Ecotone of Trees and Bamboos Using Terrestrial Laser Scanner. For. Ecol. Manag. 2023, 541, 121085. [Google Scholar] [CrossRef]
- Wang, D.; Wan, B.; Qiu, P.; Zuo, Z.; Wang, R.; Wu, X. Mapping Height and Aboveground Biomass of Mangrove Forests on Hainan Island Using UAV-LiDAR Sampling. Remote Sens. 2019, 11, 2156. [Google Scholar] [CrossRef]
- Renslow, M.; Greenfield, P.; Guay, T. Evaluation of Multi-Return LIDAR for Forestry Applications. Inventory & Monitoring Project Report Liaison and Special Projects. 2000. Available online: https://www.fs.usda.gov/eng/techdev/IM/rsac_reports/lidar_report.pdf (accessed on 23 January 2024).
- Chen, Y.; Lin, J.; Liao, X. Early Detection of Tree Encroachment in High Voltage Powerline Corridor Using Growth Model and UAV-Borne LiDAR. Int. J. Appl. Earth Obs. 2022, 108, 102740. [Google Scholar] [CrossRef]
- Almeida, D.R.A.D.; Broadbent, E.N.; Ferreira, M.P.; Meli, P.; Brancalion, P.H.S. Monitoring restored tropical forest diversity and structure through UAV-borne hyperspectral and lidar fusion. Remote Sens. Environ. 2021, 264, 112582. [Google Scholar] [CrossRef]
- Hu, T.; Sun, X.; Su, Y.; Guan, H.; Sun, Q.; Kelly, M.; Guo, Q. Development and Performance Evaluation of a Very Low-Cost UAV-Lidar System for Forestry Applications. Remote Sens. 2020, 13, 77. [Google Scholar] [CrossRef]
- Dalla Corte, A.P.; Rex, F.E.; Almeida, D.R.A.D.; Sanquetta, C.R.; Silva, C.A.; Moura, M.M.; Wilkinson, B.; Zambrano, A.M.A.; Cunha Neto, E.M.D.; Veras, H.F.P. Measuring Individual Tree Diameter and Height Using GatorEye High-Density UAV-Lidar in an Integrated Crop-Livestock-Forest System. Remote Sens. 2020, 12, 863. [Google Scholar] [CrossRef]
- Arroyo-Mora, J.P.; Kalacska, M.; Løke, T.; Schläpfer, D.; Coops, N.C.; Lucanus, O.; Leblanc, G. Assessing the Impact of Illumination on UAV Pushbroom Hyperspectral Imagery Collected under Various Cloud Cover Conditions. Remote Sens. Environ. 2021, 258, 112396. [Google Scholar] [CrossRef]
- Sun, W.; Hu, Y.; MacDonnell, D.G.; Weimer, C.; Baize, R.R. Technique to Separate Lidar Signal and Sunlight. Opt. Express 2016, 24, 12949. [Google Scholar] [CrossRef]
- Xu, L.; Yao, L.; Ai, X.; Guo, Q.; Wang, S.; Zhou, D.; Deng, C.; Ai, X. Litter Autotoxicity Limits Natural Regeneration of Metasequoia glyptostroboides. New For. 2023, 54, 897–919. [Google Scholar] [CrossRef]
- Andersen, H.E.; Reutebuch, S.E.; McGaughey, R.J. A rigorous assessment of tree height measurements obtained using airborne LIDAR and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved Progressive TIN Densification Filtering Algorithm for Airborne LiDAR Data in Forested Areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Wei, L.X.; Yang, B.A.; Jiang, J.P.; Cao, G.Z.; Wu, M.F. Vegetation filtering algorithm for UAV-borne lidar point clouds: A case study in the middle-lower Yangtze river riparian zone. Int. J. Remote Sens. 2017, 38, 2991–3002. [Google Scholar] [CrossRef]
- Lin, J.; Chen, D.; Wu, W.; Liao, X. Estimating Aboveground Biomass of Urban Forest Trees with Dual-Source UAV Acquired Point Clouds. Urban For. Urban Green. 2022, 69, 127521. [Google Scholar] [CrossRef]
- Morsdorf, F.; Meier, E.; Allgöwer, B.; Nüesch, D. Clustering in airborne laser scanning raw data for segmentation of single trees. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2003, 34, 27–33. [Google Scholar]
- Wulder, M.; Niemann, K.O.; Goodenough, D.G. Local maximum filtering for the extraction of tree locations and basal area from high spatial resolution imagery. Remote Sens. Environ. 2000, 73, 103–114. [Google Scholar] [CrossRef]
- Mara, C.A.; Cribbie, R.A. Paired-Samples Tests of Equivalence. Commun. Stat. Simul. Comput. 2012, 41, 1928–1943. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmentation Individual Trees from the LiDAR Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Wu, S.; Song, X.; Liu, B. Fraunhofer Lidar Prototype in the Green Spectral Region for Atmospheric Boundary Layer Observations. Remote Sens. 2013, 5, 6079–6095. [Google Scholar] [CrossRef]
- Kawalec, T.; Sowa, P. Observation of two truly independent laser interference made easy. Eur. J. Phys. 2021, 42, 055305. [Google Scholar] [CrossRef]
- Lei, B.; Wang, J.; Li, J.; Tang, J.; Wang, Y.; Zhao, W.; Duan, Y. Influence of humidity on the characteristics of laser-induced air plasma. Jpn. J. Appl. Phys. 2018, 57, 106001. [Google Scholar] [CrossRef]
- Chung, E.S.; Sohn, B.J.; Schmetz, J.; Koenig, M. Diurnal Variation of Upper Tropospheric Humidity and Its Relations to Convective Activities over Tropical Africa. Atmos. Chem. Phys. 2007, 7, 2489–2502. [Google Scholar] [CrossRef]
- Adams, T.; Brack, C.; Farrier, T.; Pontl, D.; Brownlie, R. So you want to use LiDAR? A guide on how to use LiDAR in forestry. N. Z. J. For. 2011, 55, 19–23. [Google Scholar]
- Calders, K.; Armston, J.; Newnham, G.; Herold, M.; Goodwin, N. Implications of Sensor Configuration and Topography on Vertical Plant Profiles Derived from Terrestrial LiDAR. Agric. For. Meteorol. 2014, 194, 104–117. [Google Scholar] [CrossRef]
- Singh, C.H.; Jain, K.; Mishra, V. UAV-Based Terrain-Following Mapping Using LiDAR in High Undulating Catastrophic Areas. In Proceedings of the UASG 2021: Wings 4 Sustainability; Lecture Notes in Civil Engineering; Jain, K., Mishra, V., Pradhan, B., Eds.; Springer: Cham, Switzerland, 2023; Volume 304. [Google Scholar] [CrossRef]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating Forest Structural Attributes Using UAV-LiDAR Data in Ginkgo Plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Zhang, X.; Wei, H.; Zhang, X.; Liu, J.; Zhang, Q.; Gu, W. Non-Pessimistic Predictions of the Distributions and Suitability of Metasequoia Glyptostroboides under Climate Change Using a Random Forest Model. Forests 2020, 11, 62. [Google Scholar] [CrossRef]
- Mielcarek, M.; Kamińska, A.; Stereńczak, K. Digital Aerial Photogrammetry (DAP) and Airborne Laser Scanning (ALS) as Sources of Information about Tree Height: Comparisons of the Accuracy of Remote Sensing Methods for Tree Height Estimation. Remote Sens. 2020, 12, 1808. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value/Description |
|---|---|
| Platform | Feima D-2000 |
| Laser class | class 1 |
| Ranging mode | TOF (Time of Flight) |
| Wavelength | 905 nm |
| Return number | 3 returns |
| Return intensity | 8 bit |
| Ranging accuracy | ±2 cm (50 m) |
| Point frequency | 240 kpts/s |
| Horizontal FOV (Field of View) | 70.4° |
| Vertical FOV | 4.5°/77.2° |
| Description | ||
|---|---|---|
| Date | 10 September 2023 | 11 September 2023 |
| Atmospheric condition | Sunny | Overcast |
| Time points | Sunrise (6:00); noon (12:00); sunset (18:00); night (21:00) | |
| Tree ID | Height (m) | Tree ID | Height (m) | Tree ID | Height (m) |
|---|---|---|---|---|---|
| 1 | 14.869 | 12 | 18.240 | 23 | 17.004 |
| 2 | 14.647 | 13 | 17.766 | 24 | 17.540 |
| 3 | 14.654 | 14 | 13.750 | 25 | 12.164 |
| 4 | 16.556 | 15 | 16.463 | 26 | 16.305 |
| 5 | 18.961 | 16 | 15.753 | 27 | 17.035 |
| 6 | 11.563 | 17 | 14.839 | 28 | 12.728 |
| 7 | 14.295 | 18 | 15.701 | 29 | 11.981 |
| 8 | 10.627 | 19 | 16.753 | 30 | 12.108 |
| 9 | 14.619 | 20 | 19.739 | 31 | 8.652 |
| 10 | 8.793 | 21 | 18.522 | 32 | 14.503 |
| 11 | 17.476 | 22 | 15.267 |
| Atmospheric Condition | Time Point | Average Tree Height (m) | Standard Deviation of Tree Height (m) |
|---|---|---|---|
| Sunny | sunrise | 12.97 | 2.49 |
| noon | 12.80 | 2.56 | |
| sunset | 12.93 | 2.44 | |
| night | 13.09 | 2.56 | |
| Overcast | sunrise | 12.99 | 2.47 |
| noon | 12.83 | 2.58 | |
| sunset | 13.04 | 2.49 | |
| night | 13.10 | 2.53 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; Lin, J.; Wu, W.; Jiang, R. Effects of Illumination Conditions on Individual Tree Height Extraction Using UAV LiDAR: Pilot Study of a Planted Coniferous Stand. Forests 2024, 15, 758. https://doi.org/10.3390/f15050758
Li T, Lin J, Wu W, Jiang R. Effects of Illumination Conditions on Individual Tree Height Extraction Using UAV LiDAR: Pilot Study of a Planted Coniferous Stand. Forests. 2024; 15(5):758. https://doi.org/10.3390/f15050758
Chicago/Turabian StyleLi, Tianxi, Jiayuan Lin, Wenjian Wu, and Rui Jiang. 2024. "Effects of Illumination Conditions on Individual Tree Height Extraction Using UAV LiDAR: Pilot Study of a Planted Coniferous Stand" Forests 15, no. 5: 758. https://doi.org/10.3390/f15050758
APA StyleLi, T., Lin, J., Wu, W., & Jiang, R. (2024). Effects of Illumination Conditions on Individual Tree Height Extraction Using UAV LiDAR: Pilot Study of a Planted Coniferous Stand. Forests, 15(5), 758. https://doi.org/10.3390/f15050758