
Application and Accuracy of Unmanned Aerial Survey Imagery after Salvage Logging in Different Terrain Conditions

 ,
, 


Abstract
1. Introduction
2. Materials and Methods
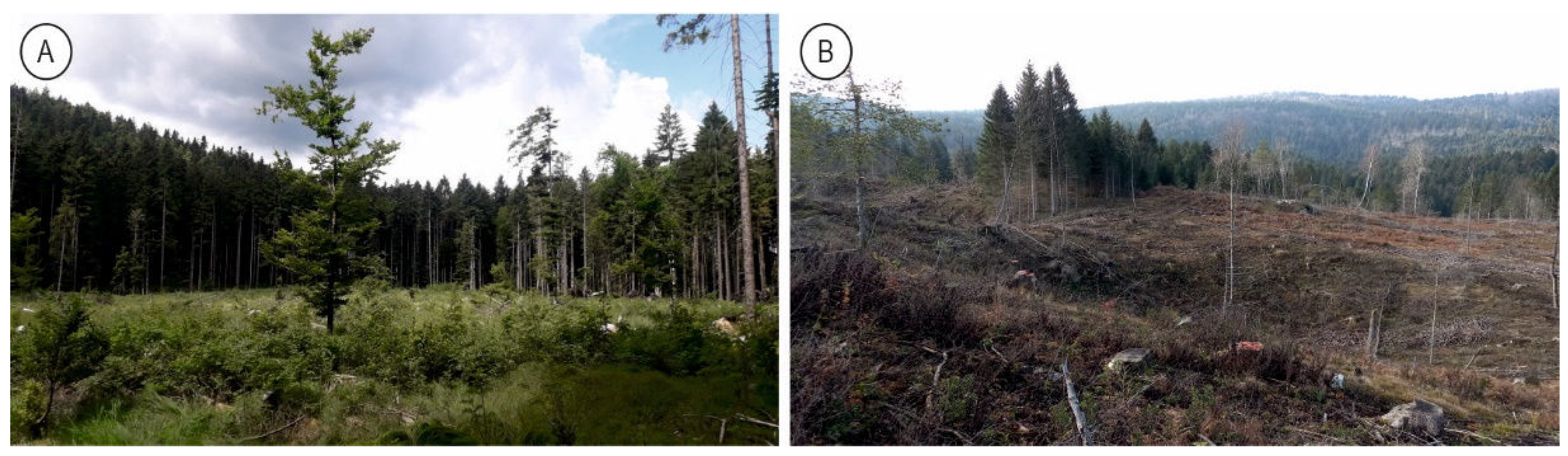
2.1. Study Area
2.2. Used Equipment and Softvare
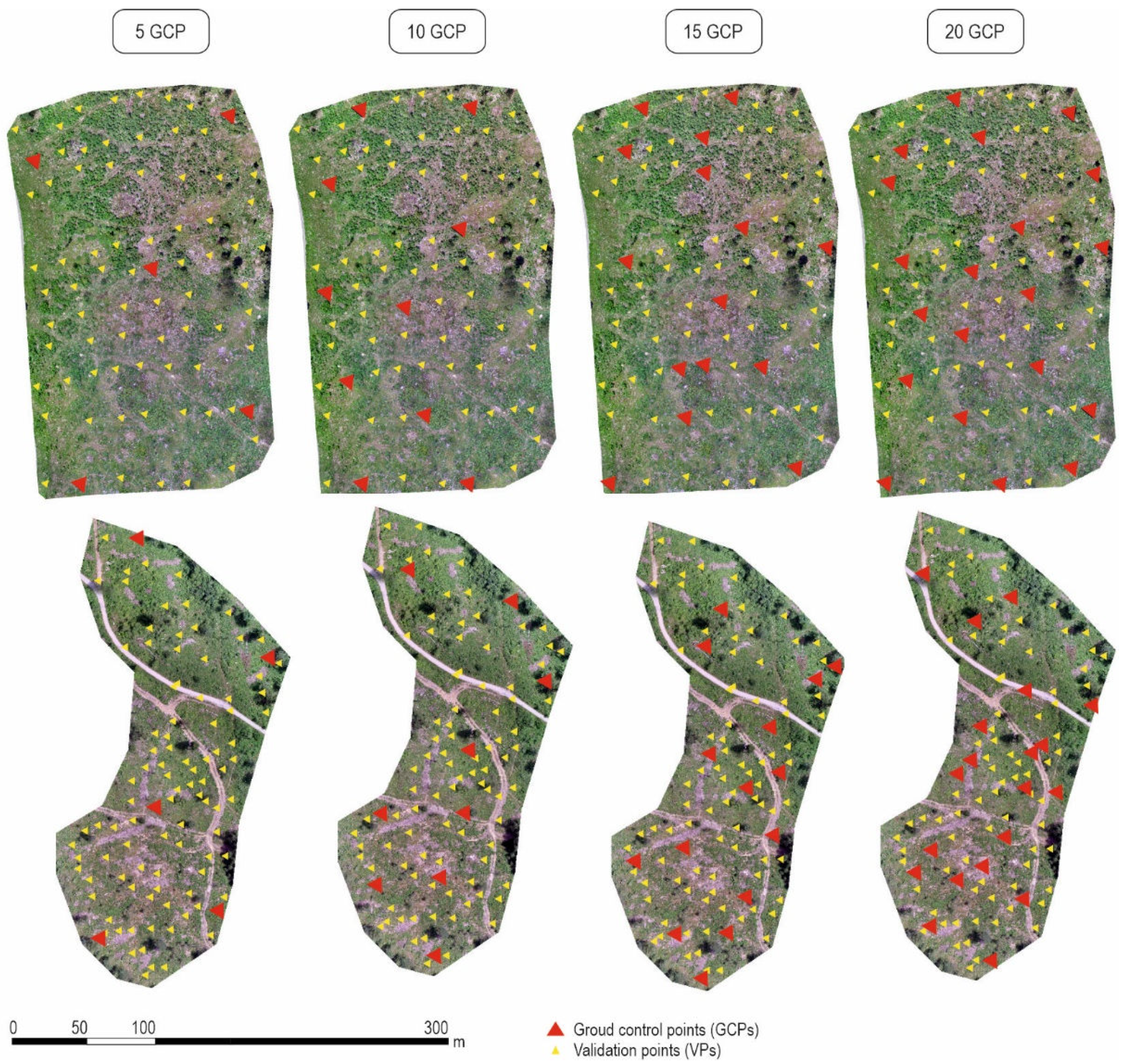
2.3. Evaluation Methods
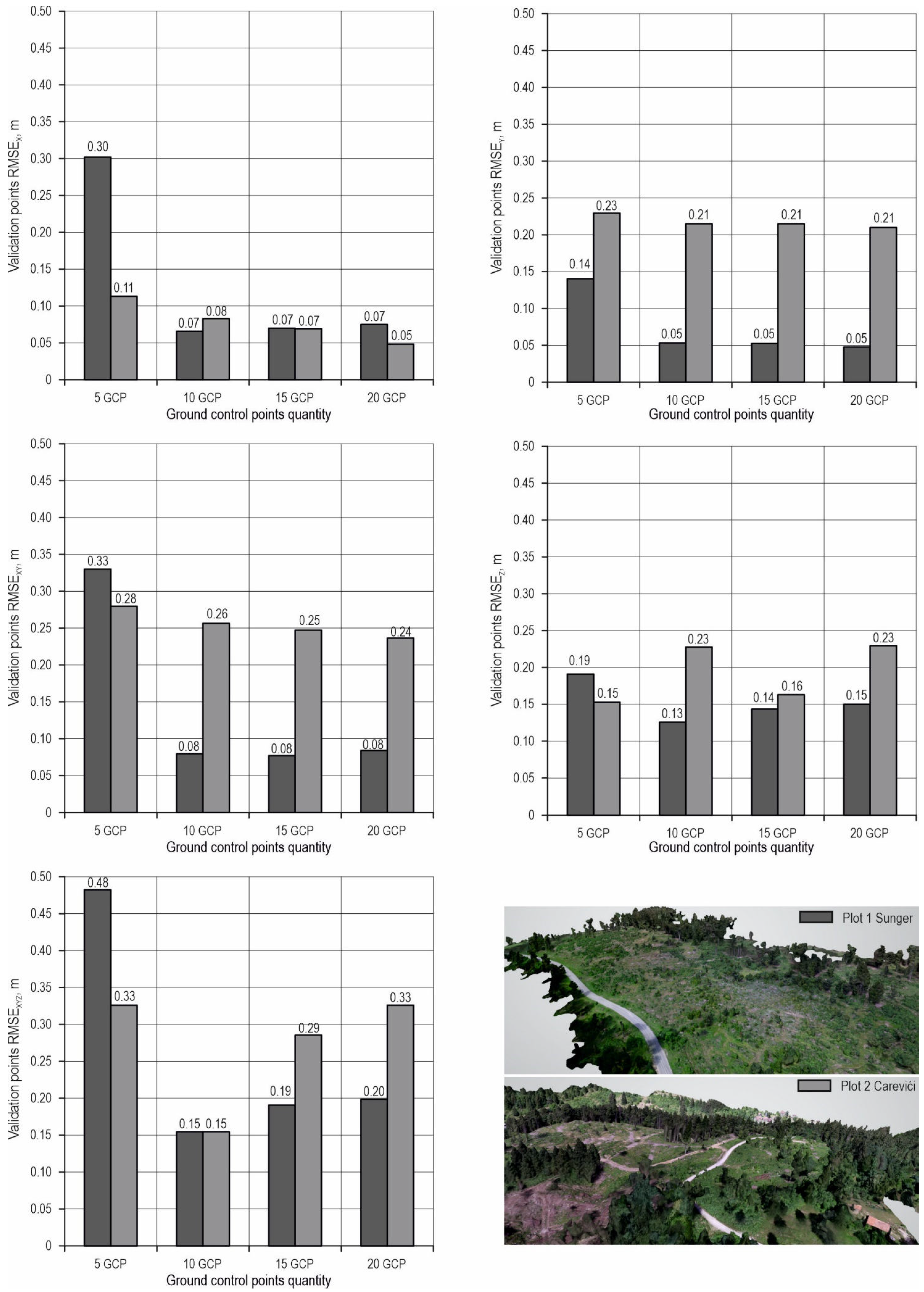
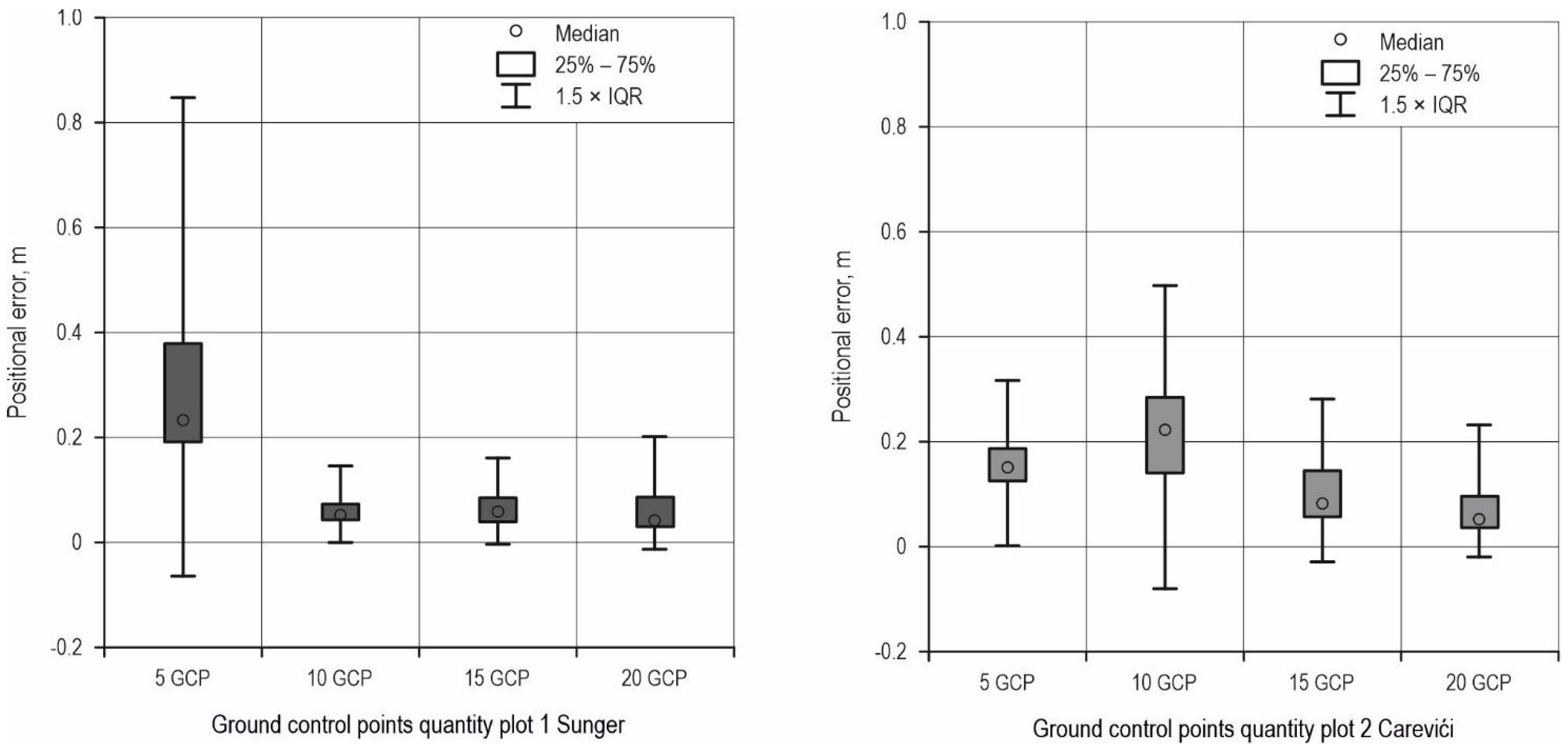
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Čavlović, J. Prva Nacionalna Inventura Šuma Republike Hrvatske. Ministry of Regional Development, Forestry and Water Management; University of Zagreb, Faculty of Forestry and Wood Wechnology: Zagreb, Croatia, 2010; pp. 1–300. [Google Scholar]
- Netherer, S.; Nopp-Mayr, U. Predisposition assessment systems (PAS) as supportive tools in forest management–rating of site and stand-related hazards of bark beetle infestation in the High Tatra Mountains as an example for system application and verification. For. Ecol. Manag. 2005, 207, 99–107. [Google Scholar] [CrossRef]
- Matić, S. The impact of site changes and management methods on dieback of common spruce (Picea abies Karst.) in Croatia. Croat. J. For. Eng. 2011, 32, 7–16. [Google Scholar]
- Grégoire, J.-C.; Evans, H.F. Damage and control of Bawbilt organisms—An overview. In Bark and Wood Boring Insects in Living Trees in Europe, A Synthesis; Lieutier, F., Day, K.R., Battisti, A., Grégoire, J.-C., Evans, H.F., Eds.; Kluwer Academic Publishers: Dordrecht, UK, 2004; pp. 19–37. [Google Scholar]
- Brus, D.J.; Hengeveld, G.M.; Walvoort, D.J.J.; Goedhart, P.W.; Heidema, A.H.; Nabuurs, G.J.; Gunia, K. Statistical mapping of tree species over Europe. Eur. J. For. Res. 2012, 131, 145–157. [Google Scholar] [CrossRef]
- Tomljanović, K.; Đuka, A.; Franjević, M.; Jurjević, L.; Matak, I.; Ugarković, D.; Balenović, I. Application of UAS for monitoring of forest ecosystems—A review of experience and knowledge. Croat. J. For. Eng. 2022, 43, 487–504. [Google Scholar] [CrossRef]
- Hillman, S.; Wallace, L.; Lucieer, A.; Reinke, K.; Turner, D.; Jones, S. A comparison of terrestrial and UAS sensors for measuring fuel hazard in a dry sclerophyll forest. Int. J. Appl. Earth Obs. 2021, 95, 102261. [Google Scholar] [CrossRef]
- Schiefer, F.; Kattenborn, T.; Frick, A.; Frey, J.; Schall, P.; Koch, B.; Schmidtlein, S. Mapping forest tree species in high resolution UAV-based RGB-imagery by means of convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2020, 170, 205–215. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices: Review article. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Tomljanović, K.; Nosek, H.; Pernar, R.; Grubešić, M. Mogućnosti primjene lakih bespilotnih letjelica u prebrojavanju krupne divljači. Šumarski List 2018, 142, 621–626. [Google Scholar] [CrossRef]
- Balenović, I.; Liang, X.; Jurjević, L.; Hyyppä, J.; Seletković, A.; Kukko, A. Hand-held personal laser scanning–current status and perspectives for forest inventory application. Croat. J. For. Eng. 2021, 42, 165–183. [Google Scholar] [CrossRef]
- Hycza, T.; Ciesielski, M.; Zasada, M.; Bałazy, R. Application of black-bridge satellite imagery for the spatial distribution of salvage cutting in stands damaged by wind. Croat. J. For. Eng. 2019, 40, 125–138. [Google Scholar]
- Mokroš, M.; Výbošťok, J.; Merganič, J.; Hollaus, M.; Barton, I.; Koreň, M.; Tomaštík, J.; Čerňava, J. Early stage forest windthrow estimation based on unmanned aircraft system imagery. Forests 2017, 8, 306. [Google Scholar] [CrossRef]
- Talbot, B.; Astrup, R. A review of sensors, sensor-platforms and methods used in 3D modelling of soil displacement after timber harvesting. Croat. J. For. Eng. 2021, 42, 149–164. [Google Scholar] [CrossRef]
- Talbot, B.; Nowell, T.; Berg, S.; Astrup, R.; Routa, J.; Väätäinen, K.; Ala-Ilomäki, J.; Lindeman, H.; Prinz, R. Continuous surface assessments of wheel rutting compared to discrete point measurements—do the benefits justify the efforts? In Proceedings of the Nordic-Baltic Conference on Forest Operations for the Future, Elsinore, Denmark, 22–24 September 2020. [Google Scholar]
- Pradeep, G.S.; Danumah, J.H.; Nikhil, S.; Prasad, M.K.; Patel, N.; Mammen, P.C.; ARajaneesh, V.O.; Ajin, R.S.; Kuriakose, S.L. Forest fire risk zone mapping of Eravikulam National Park in India: A comparison between frequency ratio and analytic hierarchy process methods. Croat. J. For. Eng. 2022, 43, 199–217. [Google Scholar] [CrossRef]
- Miller, Z.M.; Hupy, J.; Chandrasekaran, A.; Shao, G.; Fei, S. Application of postprocessing kinematic methods with UAS remote sensing in forest ecosystems. J. For. 2021, 119, 454–466. [Google Scholar] [CrossRef]
- Rydlund, P.H., Jr.; Densmore, B.K. Methods of practice and guidelines for using survey-grade global navigation satellite systems (GNSS) to establish vertical datum in the United States Geological Survey: US Geological Survey Techniques and Methods, book 11, chap. In US Geological Survey Techniques and Methods; Book 11; USGS: Reston, VA, USA, 2012; 102 p. [Google Scholar]
- Li, T.; Georgy, J.; Syed, Z.; Goodall, C. Real-time navigation system for ultra-tight integration of GNSS and multi-sensors. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 16–20 September 2013; pp. 2269–2275. [Google Scholar]
- QGIS Tutorials and Tips. Available online: https://www.qgistutorials.com/en/ (accessed on 17 May 2022).
- PIX4Dmapper Video Tutorials-Pix4D Support. Available online: https://support.pix4d.com/hc/en-us/articles/360031682092-PIX4Dmapper-video-tutorials (accessed on 11 May 2022).
- ArcGIS Tutorials—ArcMap Documentation. Available online: https://desktop.arcgis.com/en/arcmap/latest/get-started/introduction/arcgis-tutorials.htm (accessed on 1 June 2022).
- Cramer, M.; Stallmann, D.; Haala, N. Direct georeferencing using GPS/inertial exterior orientations for photogrammetric applications. Int. Arch. Photogramm. Remote Sens. 2000, 33, 198–205. [Google Scholar]
- Skaloud, J. Direct georeferencing in aerial photogrammetric mapping. Photogramm. Eng. Remote Sen. 2002, 68, 207–210. [Google Scholar]
- Pfeifer, N.; Glira, P.; Briese, C. Direct georeferencing with on board navigation components of light weight UAV platforms. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2012, 39, 487–492. [Google Scholar] [CrossRef]
- Mihelič, J.; Robek, R.; Kobal, M. Determining bulk factors for three subsoils used in forest engineering in Slovenia. Croat. J. For. Eng. 2022, 43, 303–311. [Google Scholar] [CrossRef]
- Ciprijan, M.; Marijanović, M. 2018: Unaprjeđenje hrvatskoga pozicijskog sustava (CROPOS) povezivanjem s europskim globalnim satelitskim sustavom GALILEO. In Proceedings of the Fifth CROPOS Conference, University of Zagreb Faculty of Geodesy Zagreb, Zagreb, Croatia, 30 November 2018; pp. 27–32. [Google Scholar]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK method—An optimal solution for mapping inaccessible forested areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Villanueva, J.K.S.; Blanco, A.C. Optimization of ground control point (GCP) configuration for unmanned aerial vehicle (UAV) survey using structure from motion (SFM). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 167–174. [Google Scholar] [CrossRef]
- Nguyen, Q.L.; Goyal, R.; Cao, X.C.; Bui, N.Q.; Bui, X.N.; Bui, K.L. Flight height of UAV and its influence on the precise digital elevation model at complex terrain. Inżynieria Miner. 2020, 1, 179–186. [Google Scholar] [CrossRef]
- Kärvemo, S.; Rogell, B.; Schroeder, M. Dynamics of spruce bark beetle infestation spots: Importance of local population size and landscape characteristics after a storm disturbance. For. Ecol. Manag. 2014, 334, 232–240. [Google Scholar] [CrossRef]
- He, F.; Zhou, T.; Xiong, W.; Hasheminnasab, S.M.; Habib, A. Automated aerial triangulation for UAV-based mapping. Remote Sens. 2018, 10, 1952. [Google Scholar] [CrossRef]
- Küng, O.; Strecha, C.; Beyeler, A.; Zufferey, J.C.; Floreano, D.; Fua, P.; Gervaix, F. The accuracy of automatic photogrammetric techniques on ultra-light UAV imagery. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVII-1/C22, 125–130. [Google Scholar] [CrossRef]
- Tahar, K.N. An evaluation of different number of ground control points un unmanned aerial vehicle photogrammetric block. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-2/W2, 27–29. [Google Scholar]
- Awasthi, B.; Karki, S.; Regmi, P.; Dhami, D.S.; Thapa, S.; Panday, U.S. Analyzing the effect of distribution pattern and number of GCPs on overall accuracy of UAV photogrammetric results. In Proceedings of the UASG 2019, Roorkee, India, 6–7 April 2019; UASG 2019; Lecture Notes in Civil Engineering. Springer: Cham, Switzerland, 2019; Volume 51. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Reilly, S.; Clark, M.L.; Bentley, L.P.; Matley, C.; Piazza, E.; Oliveras Menor, I. The potential of multispectral imagery and 3D point clouds from unoccupied aerial systems (UAS) for monitoring forest structure and the impacts of wildfire in mediterranean-climate forests. Remote Sens. 2021, 13, 3810. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Nguyen, Q.L.; Bui, X.N.; Cao, X.C.; Le, V.C. An approach of mapping quarries in Vietnam using low-cost Unmanned Aerial Vehicles. Inżynieria Miner. 2019, 21, 2148–2262. [Google Scholar] [CrossRef]
- Gerke, M.; Przybilla, H.J. Accuracy analysis of photogrammetric UAV image blocks: Influence of onboard RTK-GNSS and cross flight patterns. Photogramm. Fernerkund. Geoinf. (PFG) 2016, 1, 17–30. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Station Stonex R35 | RTK GNSS Receiver Stonex S900A | DJI Inspire 1 | ||
|---|---|---|---|---|
| ANGLE MEASUREMENT (angle units) | DEG 360°/GON 400/MIL 6.400 | Gimbal Zenmuse X3. Angular Vibration Range ±0.03°; Controllable Range Pitch: −90° to + 30° Pan: ±320° | GPS: L1 C/A, L1C, L1P, L2C, L2P, L5 | DJI Inspire 1 Gimbal Zenmuse X3. Angular Vibration Range ±0.03°; Controllable Range Pitch: −90° to + 30° Pan: ±320° |
| GLONASS: L1 C/A, L1P, L2C, L2P | ||||
| BEIDOU: B1, B2, B3 | ||||
| GALILEO: E1, E5a, E5b | ||||
| QZSS: L1 C/A, L1C, L2C, L5 | ||||
| SBAS: L1, L5 | ||||
| DISTANCE MEASUREMENT RANGE | Standard mode prism 3.000 m | Max Transmitting Distance up to 5 km. | 3–4 Km in urban environment Up to 10 Km with optimal conditions | Max Transmitting Distance up to 5 km. |
| Long mode prism 5.000 m | ||||
| DISTANCE MEASUREMENT ACCURACY | Standard mode prism 2 mm + 2 ppm | GPS Hovering Accuracy: Vertical: 0.5 m Horizontal: 2.5 m | Fixed RTK Horizontal (8 mm + 1 ppm RMS) | |
| Long mode prism 2 mm + 2.5 ppm | Fixed RTK Vertical (15 mm + 1 ppm RMS) | GPS Hovering Accuracy: Vertical: 0.5 m Horizontal: 2.5 m | ||
| LASER PLUMMET (laser type) | 635 nm semiconductor laser | Operating Frequency 5.725–5.825 GHz & 2.400–2.483 GHz | 2.1 + EDR, V4.0 | |
| POWER SUPPLY (battery) | 7.4 V/3.400 mAh Li-ion | Rechargeable and replaceable TB48, 5700 mAh, 22,8 V, 12,996 Wh | 2 rechargeable and replaceable 7.2 V—3400 mAh Intelligent lithium batteries | Operating Frequency 5.725–5.825 GHz & 2.400–2.483 GHz |
| POWER SUPPLY (working time (angle + distance meas.) | Up to 5 h | Depending on the intensity of the flight approximately 18 min | Up to 12 h (2 batteries hot swap) | Rechargeable and replaceable TB48, 5700 mAh, 22.8 V, 129.96 Wh |
| PHYSICAL SPECIFICATION (dimensions) | 206 × 203 × 360 mm | 438 × 451 × 301 mm | ɸ 157 mm × 76 mm | Depending on the intensity of the flight approximately 18 min |
| PHYSICAL SPECIFICATION (Weight including Battery and tribrach) | 6.1 kg | Take-off Weight 3060 g (including propellers, battery and Zenmuse X3 camera) | 1.19 kg (with one battery) 1.30 kg (with two batteries) | 438 × 451 × 301 mm |
| RMSE | Plot 1 | Plot 2 |
|---|---|---|
| RMSEx | 0.0518 | 0.0585 |
| RMSEy | 0.0309 | 0.1412 |
| RMSEz | 0.0746 | 0.0453 |
| RMSE | Plot 1 | Plot 2 |
|---|---|---|
| RMSEx | 0.4983 | 0.9313 |
| RMSEy | 0.7117 | 3.2359 |
| RMSEz | 2.6362 | 15.0400 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Đuka, A.; Tomljanović, K.; Franjević, M.; Janeš, D.; Žarković, I.; Papa, I. Application and Accuracy of Unmanned Aerial Survey Imagery after Salvage Logging in Different Terrain Conditions. Forests 2022, 13, 2054. https://doi.org/10.3390/f13122054
Đuka A, Tomljanović K, Franjević M, Janeš D, Žarković I, Papa I. Application and Accuracy of Unmanned Aerial Survey Imagery after Salvage Logging in Different Terrain Conditions. Forests. 2022; 13(12):2054. https://doi.org/10.3390/f13122054
Chicago/Turabian StyleĐuka, Andreja, Kristijan Tomljanović, Milivoj Franjević, David Janeš, Ivan Žarković, and Ivica Papa. 2022. "Application and Accuracy of Unmanned Aerial Survey Imagery after Salvage Logging in Different Terrain Conditions" Forests 13, no. 12: 2054. https://doi.org/10.3390/f13122054
APA StyleĐuka, A., Tomljanović, K., Franjević, M., Janeš, D., Žarković, I., & Papa, I. (2022). Application and Accuracy of Unmanned Aerial Survey Imagery after Salvage Logging in Different Terrain Conditions. Forests, 13(12), 2054. https://doi.org/10.3390/f13122054