
Early Monitoring of Health Status of Plantation-Grown Eucalyptus pellita at Large Spatial Scale via Visible Spectrum Imaging of Canopy Foliage Using Unmanned Aerial Vehicles

 ,
,
Abstract
1. Introduction
2. Methods
2.1. Study Area and Tree Health Data
2.2. Early Inventory Measurement
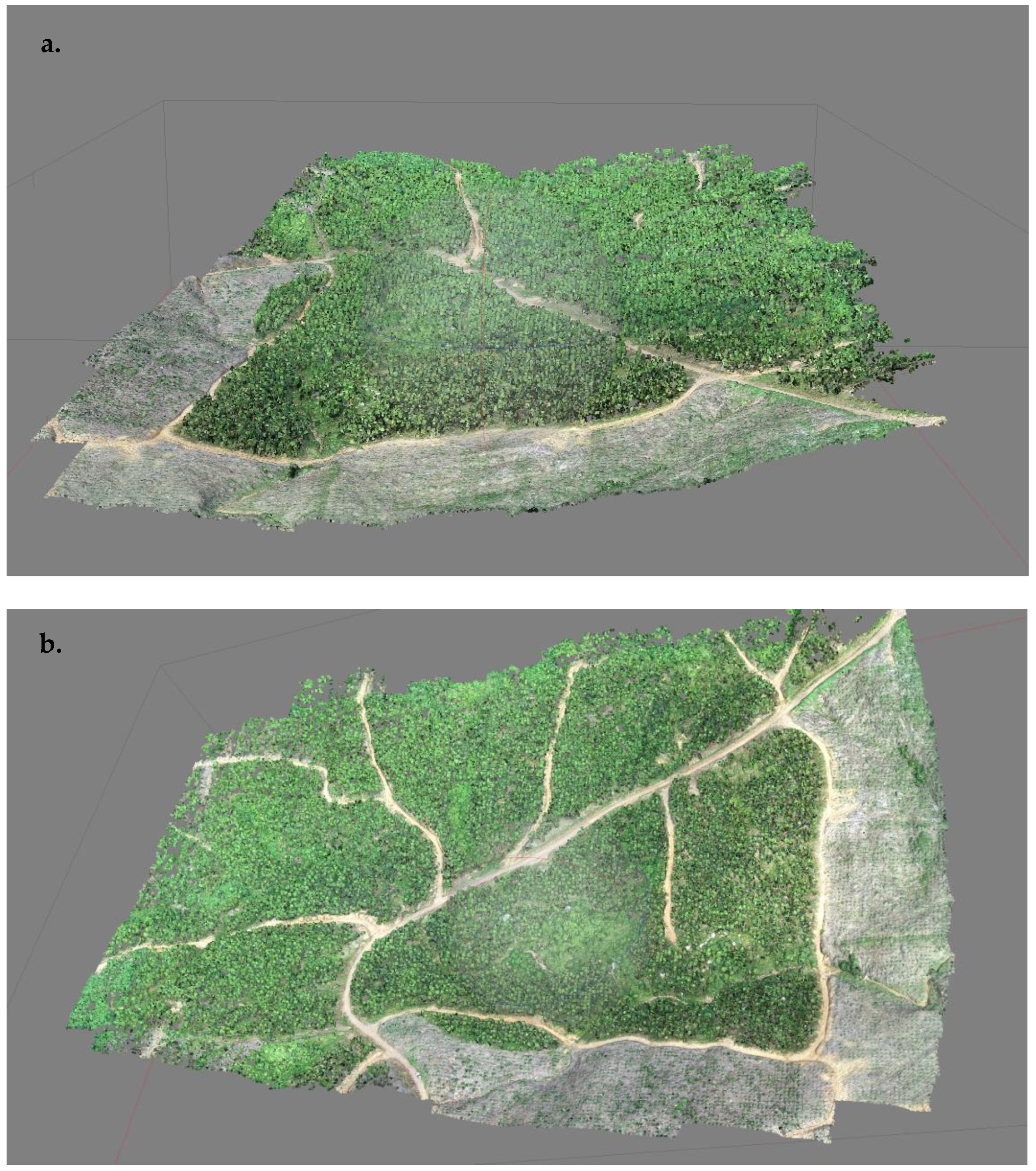
2.3. Unmanned Aerial Vehicle Image Acquisition
2.4. Image Processing
2.5. Image Analysis
2.6. Zonal Statistics
2.7. Normalized Difference Vegetation Index (NDVI)
2.8. Confusion Matrix and Kappa Coefficient
3. Results
3.1. Tree Health Data and VARI-Green Indices
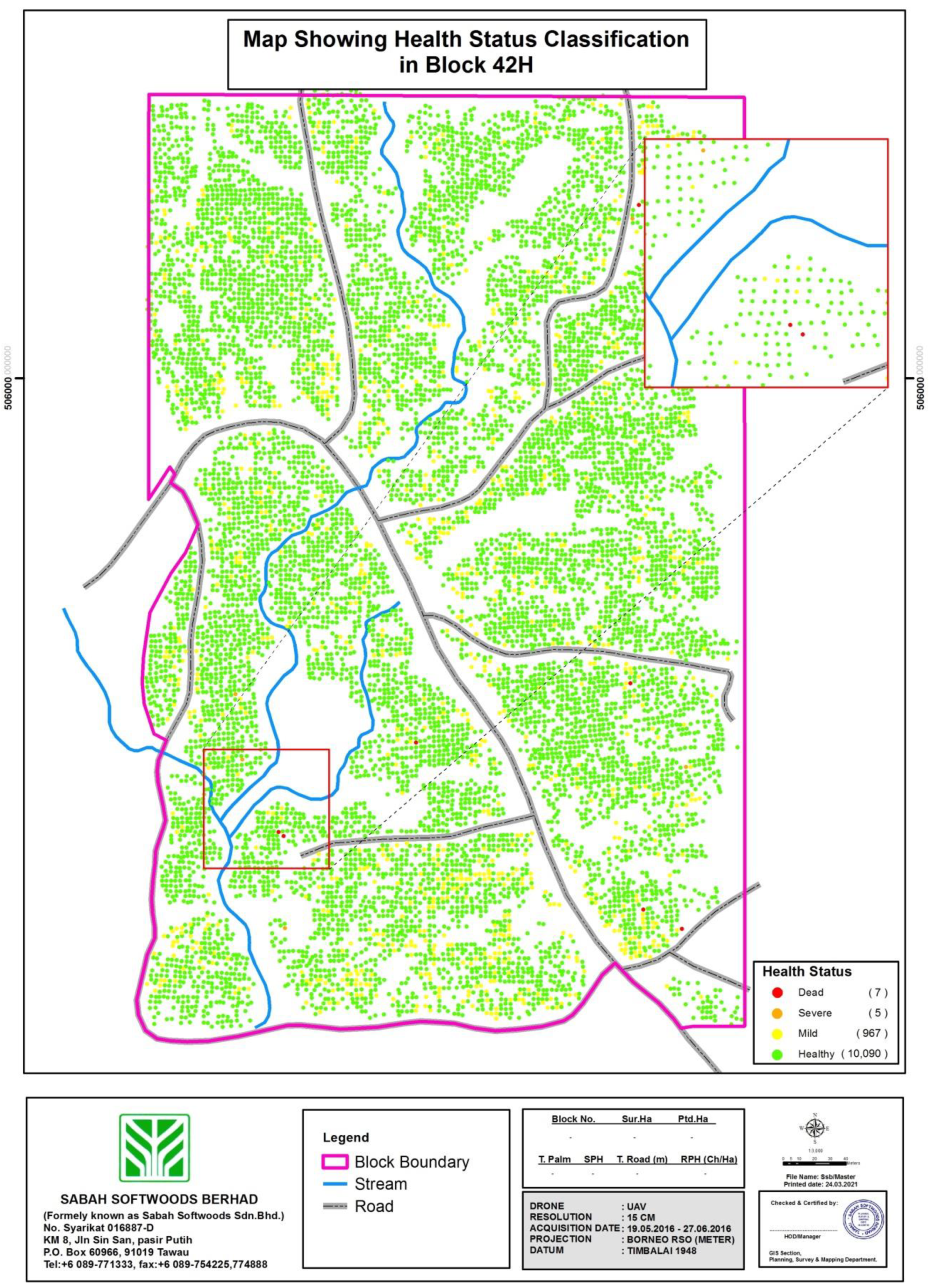
3.2. Range of Index Map of VARI-Green as Benchmark for Detection of Health Status Using UAV
3.3. VARI-Green Pattern and Tree Health Status
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Laclau, J.P.; Mareschal, L.; Bouvet, J.M. Eucalyptus plantations. Editorial. For. Ecol. Manag. 2020, 474, 3. [Google Scholar]
- Old, K.M.; Wingfield, M.J.; Yuan, Z.Q. A manual of Diseases of Eucalyptus in South-East Asia. CIFOR 2003. [Google Scholar] [CrossRef]
- Dell, B.; Hardy, G.; Burgess, T. Health and nutrition of plantation eucalypts in Asia. South. For. 2009, 131–138. [Google Scholar] [CrossRef]
- Hii, S.Y.; Ha, K.S.; Ngui, M.L.; Penguang, S., Jr.; Duju, A.; Xy, T.; Meder, R. Assessment of plantation-grown Eucalyptus pellita in Borneo, Malaysia for solid wood utilisation. Austr. For. 2017, 80, 26–33. [Google Scholar] [CrossRef]
- Jarapudin, Y.; Lapammu, M.; Alwi, A.; Warburton, P.; Macdonell, P.; Boden, D.; Brawner, J.T.; Brown, M.; Meder, R. Growth performance of selected taxa as candidate species for productive tree plantations in Borneo. Austr. For. 2020, 83, 29–38. [Google Scholar] [CrossRef]
- Jarapudin, Y.; Meder, R.; Chiu, K.C.; Lapammu, M.; Alwi, A.; Ghaffariyan, M.; Brown, M. Veneering and sawing performance of plantation-grown Eucalyptus pellita, aged 7-23 years, in Borneo Malaysia. Int. Wood Prod. J. 2021, 12, 116–127. [Google Scholar] [CrossRef]
- Jarapudin, Y.; Meder, R.; Lapammu, M.; Alwi, A.; Ghaffariyan, M.; Brown, M. Mechanical wood properties of plantation-grown E. pellita in Borneo Malaysia. Evidence of suitable properties for high-value timber end-use. Int. Wood Prod. J. 2021, 72. [Google Scholar] [CrossRef]
- RISI. Eucalypt Sawlog Market Outlook. 2016. Available online: https://www.risiinfo.com/product/eucalyptus-sawlog-outlook/ (accessed on 26 April 2021).
- Roux, J.; Wingfield, M.J. Ceratocystis species: Emerging pathogens of non-native plantation Eucalyptus and Acacia species. South. For. 2009, 71, 115–120. [Google Scholar] [CrossRef]
- Tarigan, M.; Van, W.M.; Roux, J.; Tjahjono, B.; Wingfield, M.J. Three new Ceratocystis spp. in the Ceratocystis moniliformis complex from wounds on Acacia mangium and A. crassicarpa. Mycoscience 2010, 51, 53–67. [Google Scholar] [CrossRef]
- Tarigan, M.; Wingfield, M.J. A new wilt and die-back disease of Acacia mangium associated with Ceratocystis manginecans and C. acaciivora sp. nov. in Indonesia. South Afr. J. Bot. 2011, 77, 292–304. [Google Scholar] [CrossRef]
- Brawner, J.T.; Japarudin, Y.; Lapammu, M.; Rauf, R.; Boden, D.I.; Wingfield, M.J. Evaluating the inheritance of Ceratocystis acaciivora symptom expression in a diverse Acacia mangium breeding population. South. For. 2015, 77, 83–90. [Google Scholar] [CrossRef]
- MPIC. National Timber Industry Policy, 2009–2020; Ministry of Plantation Industry and Commodities Malaysia: Putrajaya, Malaysia, 2009; 128p.
- Lee, W.S.; Alchanatis, V.; Yang, C.; Hirafuji, M.; Moshou, D.; Li, C. Sensing technologies for precision specialty crop production. Comp. Electr. Agric. 2010, 74, 2–33. [Google Scholar] [CrossRef]
- Garcia-Ruiz, F.; Sankaran, S.; Maja, J.M.; Lee, W.S.; Rasmussen, J.; Ehsani, R. Comparison of two aerial imaging platforms for identification of Huanglongbing-infected citrus trees. Comp. Electr. Agric. 2013, 91, 106–115. [Google Scholar] [CrossRef]
- Dash, J.P.; Watt, M.S.; Pearse, G.D.; Heaphy, M.; Dungey, H.S. Assessing very high resolution UAV imagery for monitoring forest health during a simulated disease outbreak. ISPRS J. Photogram. Rem. Sens. 2017, 131, 1–14. [Google Scholar] [CrossRef]
- Abdollahnejad, A.; Panagiotidis, D. Tree species classification and health status assessment for mixed broadleaf-conifer forest with UAS multispectral imaging. Rem. Sens. 2020, 12, 3722. [Google Scholar] [CrossRef]
- Del-Campo-Sanchez, A.; Moreno, M.; Ballesteros, R.; Hernandez-Lopez, D. Geometric characterization of vines from 3D point clouds obtained with laser scanner systems. Rem. Sens. 2019, 11, 2365. [Google Scholar] [CrossRef]
- Stark, B. Optimal Remote Sensing with Small Unmanned Aircraft Systems and Risk Management. Ph.D. Thesis, University of California Merced United Stated Amarica, 2017. Stark_ucmerced_1660D_10275. Available online: https://escholarship:uc/item/83v8v082 (accessed on 18 December 2020).
- Ballesteros, R.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Applications of georeferenced high-resolution images obtained with unmanned aerial vehicles Part I: Description of image acquisition and processing. Precis. Agric. 2014, 15, 579–592. [Google Scholar] [CrossRef]
- Sattar, F.; Tamatea, L.; Nawaz, M. Droning the pedagogy: Future prospect of teaching and learning. Int. J. Educ. Pedag. Sci. 2017, 11, 62017. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Skakun, S.V.; Shelestov, A.Y. Deep learning classification of land cover and crop types using remote sensing data. IEEE Geosci. Rem. Sens. 2017, 99, 1–5. [Google Scholar] [CrossRef]
- Ballesteros, R.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Applications of georeferenced high-resolution images obtained with unmanned aerial vehicles Part II: Application to maize and onion crops of a semi-arid region in spain. Precis. Agric. 2014, 15, 593–614. [Google Scholar] [CrossRef]
- Senthilnath, J.; Kandukuri, M.; Dokania, A.; Ramesh, K.N. Application of UAV imaging platform for vegetation analysis based on spectral-spatial method. Comp. Electr. Agric. 2017, 140, 8–24. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S.C.; Murray, S.C.; Putman, E.; Pugh, N.A.; Horne, D.W. Multitemporal field-based plant height estimation using 3D point clouds generated from small unmanned aerial systems high-resolution imagery. Int. J. Appl. Earth Observ. Geoinform. 2018, 64, 31–42. [Google Scholar] [CrossRef]
- Hunt, E.R.; Rondon, S.I.; Hamm, P.B.; Turner, R.W.; Bruce, A.E.; Brungardt, J.J. Insect detection and nitrogen management for irrigated potatoes using remote sensing from small unmanned aircraft systems. In Proceedings of the SPIE Commercial and Scientific Sensing and Imaging, Baltimore, MD, USA, 17–21 April 2016. 98660N. [Google Scholar] [CrossRef]
- Ampatzidis, Y.; Partel, V.; Meyering, B.; Albrecht, U. Cirtus rootstock evaluation utilizing UAV-based remote sensing and artificial intelligence. Comp. Electr. Agric. 2019, 164. [Google Scholar] [CrossRef]
- Abdulridha, J.; Batuman, O.; Ampatzidis, Y. UAV-based remote sensing technique to detect citrus canker disease utilizing hyperspectral imaging and machine learning. Rem. Sens. 2019, 11, 1373. [Google Scholar] [CrossRef]
- Sugiura, R.; Tsuda, S.; Tamiya, S.; Itoh, A.; Nishiwaki, K.; Murakami, N.; Shibuya, Y.; Hirafugi, M.; Nuska, S. Field phenotyping system for the assessment of potato late blight resistance using RGB imagery from an unmanned aerial vehicle. Biosyst. Engineer. 2016, 148, 1–10. [Google Scholar] [CrossRef]
- Rodríguez, J.; Lizarozo, I.; Prieto, F.; Angulo-Morales, V. Assessment of potato late blight from UAV-based multispectral imagery. Comp. Electr. Agric. 2021, 184, 106061. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Rem. Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Braun, M.; Herold, M. Mapping imperviousness using NDVI and linear spectral unmixing of ASTER data in the Cologne-Bonn region (Germany). In Proceedings of the SPIE 10th International Symposium on Remote Sensing, Barcelona, Spain, 8–12 September 2004; p. 5239. [Google Scholar] [CrossRef]
- Peña, J.; Torres-Sánchez, J.; Serrano-Pérez, A.; De Castro, A.I.; López-Granados, F. Quantifying Efficacy and Limits of Unmanned Aerial Vehicle (UAV) Technology for weed seedling detection as affected by sensor resolution. Sensors 2015, 15, 5609–5626. [Google Scholar] [CrossRef] [PubMed]
- Candiago, S.; Remondino, F.; Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Rem. Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef]
- Yue, J.; Lei, T.; Li, C.; Zhu, J. The application of unmanned aerial vehicle remote sensing in quickly monitoring crop pests. Intell. Autom. Soft Comput. 2012, 18, 1043–1052. [Google Scholar] [CrossRef]
- Rasmussen, J.; Ntakos, G.; Nielsen, J.; Svensgaard, J.; Poulsen, R.N.; Christensen, S. Are vegetation indices derived from consumer-grade cameras mounted on UAVs sufficiently reliable for assessing experimental plots? Europ. J. Agron. 2016, 74, 75–92. [Google Scholar] [CrossRef]
- Dell, M.; Stone, C.; Osborn, J.; Glen, M.; McCoul, C.; Rimbawanto, A.; Tjahyono, B.; Mohammed, C. Detection of necrotic foliage in young Eucalyptus pellita plantation using unmanned aerial vehicle RGB photography—A demonstration concept. Austr. For. 2019, 82, 80–86. [Google Scholar] [CrossRef]
- Marto, A.; Yusoff, S.M. Major Soil Type, Soil Classification, And Soil Maps; CRC Press: Boca Raton, FL, USA, 2017; p. 224. ISBN 978-1138-19769-5. [Google Scholar]
- Giles, M.F. Explaining the unsuitability of the kappa coefficient in the assessment and comparison of the accuracy of thematic maps obtained by image classification. Remote. Sens. Environ. 2020, 239, 0034–4257. [Google Scholar] [CrossRef]
- L3Hariss Geospatial Home Page. Available online: https://www.l3harrisgeospatial.com/docs/calculatingconfusionmatrices.html (accessed on 4 September 2021).
- Fleiss, J.L.; Cohen, J.; Everitt, B.S. Large sample standard errors of kappa and weighted kappa. Psychol. Bull. 1969, 72, 323–327. [Google Scholar] [CrossRef]
- McHugh, M.L. Interrater reliability: The kappa statistic. Biochem. Med. 2012, 22, 276–282. [Google Scholar] [CrossRef]
- Carstensen, G.D.; Venter, S.N.; Wingfield, M.J.; Coutinho, T.A. Two Ralstonia species associated with bacterial wilt of Eucalyptus. Plant Pathol. 2017, 66, 393–403. [Google Scholar] [CrossRef]
- Suheri, M.; Haneda, N.F.; Jung, Y.H.; Sukeno, S.; Moon, H.K. Effectiveness of pheromone traps for monitoring Zeuzera sp. (Lepidoptera: Cossidae) population on Eucalyptus pellita plantation. IOP Conf. Ser. Earth Environ. Sci. 2020, 468, 012016. [Google Scholar] [CrossRef]
- Kodakkadan, S.; Yeshwanth, H.M.; de Souza Tavares, W.; Pasaribu, I.; Abad, J.I.M.; Tarigan, M.; Duran, A.; Yong, W.C.; Sharma, M. Mirid pests of Eucalyptus in Indonesia: Notes on damage symptoms, alternate hosts and parasitoid. J. Kansas Entomolog. Soc. 2020, 92, 577–588. [Google Scholar] [CrossRef]
- Gindaba, J.; Rozanov, A.; Negash, L. Response of seedlings of two Eucalyptus and three deciduous tree species from Ethiopia to severe water stress. For. Ecol. Manag. 2004, 201, 119–129. [Google Scholar] [CrossRef]
- West, P.W. Growing Plantation Forests, 2nd ed.; Springer International Publishing: Basel, Switzerland, 2014; 329p, ISBN 978-3-319-01827-0. [Google Scholar]
- Alwi, A.; Lapammu, M.; Japarudin, Y.; Molony, K.; Boden, D.; Macdonell, P.; Warburton, P.; Brawner, J.T.; Meder, R. Importance of weed control prior to planting for the establishment of planted forests in Sabah, Malaysia. J. Trop. For. Sci. 2020, 32, 349–354. [Google Scholar] [CrossRef]
- Beisel, N.S.; Callaham, J.B.; Sng, N.J.; Taylor, D.J.; Paul, A.L.; Ferl, R.J. Utilization of single-image normalized difference vegetation index (SI-NDVI) for early plant stress detection. Appl. Plant Sci. 2018, 19, e01186. [Google Scholar] [CrossRef] [PubMed]
- Caturegli, L.; Corniglia, M.; Gaetani, M.; Grossi, N.; Magni, S.; Migliazzi, M.; Angelini, L.; Mazzoncini, M.; Silvestri, N.; Fontanelli, M.; et al. Unmanned aerial vehicle to estimate nitrogen status of turfgrasses. PLoS ONE 2016. [Google Scholar] [CrossRef]
- Xu, R.; Li, C.; Paterson, A.H. Multispectral imaging and unmanned aerial system for cotton plant phenotyping. PLoS ONE 2019. [Google Scholar] [CrossRef]
- Costa, L.; Nunes, L.; Ampatzidis, Y. A new visible band index (vNDVI) for estimating NDVI value on RGB images utilizing genetic algorithms. Comp. Electr. Agric. 2020, 172, 105334. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pre-Processing Parameter | Values |
|---|---|
| Flying Height | 129 m |
| Ground Sample distance | 3.5 cm |
| Flight Line | Parallel |
| Camera snapping | Auto |
| Image Ratio | 3:02 |
| ISO | 100 |
| F-stop | 4.5 |
| Shutter | 1/200 s |
| Capture Rates | 3.02 |
| Speed | Auto |
| Flight Duration | 30 min |
| Processing Parameters | Values |
|---|---|
| Alignment | |
| Accuracy | High |
| Generic Preselection | Yes |
| Reference Preselection | No |
| key point limit | 40,000 |
| Tie point limit | 4000 |
| Adaptive camera model fitting | Yes |
| Matching time | 11 min 52 s |
| Alignment time | 3 min 11 s |
| Optimization | |
| Parameters | F, b1, b2, cx, cy, k1-k4, p1, p2 |
| Adaptive camera model fitting | No |
| Optimization time | 8 s |
| Dense point cloud | |
| Points | 16,653,614 |
| Point colors | 3 band (RGB), unit 8 |
| Red | 625–700 nm |
| Green | 500–565 nm |
| Blue | 450–485 nm |
| Reconstructions | |
| Quality | High |
| Depth filtering | Mild |
| Depth maps generation time | 2 h 34 min |
| Dense cloud generation time | 3 h 51 min |
| Total Raw Images | 178 Pcs |
| Tie Point Cloud | |
|---|---|
| Point | 102,671 of 108,813 |
| Root Mean Square reprojection error | 0.162116 (1.16695 pix) |
| Max reprojection error | 0.487534 (44.9617 pix) |
| Mean key point size | 5.71308 pix |
| Effective overlap | 3.46308 |
| Dense Point Cloud | |
| Point | 21,985,408 |
| Geomatic Product | Size |
|---|---|
| Collected Image | 178 files (1.43 gb) |
| Agisoft PhotoScan Project | 6.11 gb |
| Full Orthoimage | 606 mb |
| Nonground Orthoimage | 393.40 mb |
| Full Orthoimage Affection Binary | - |
| Validation Mask | - |
| Red band | 639.21 mb |
| Green band | 639.21 mb |
| Blue band | 639.21 mb |
| Class | Health Status | VARI-Green Value | Number of Trees | Symptoms | Causal Agent |
|---|---|---|---|---|---|
| 1 | Dead | −2–0 | 7 | Trees no longer functional due to vascular and leaves discoloration | Pathogenic microorganism (Ralstonia solanacearum) |
| 2 | Severe infection | 0–0.05 | 5 | Splitting of trunk at stem with stippling leaves and discoloration | Stem borer (Zeuzera coffeae, Endoclita sp.) and phytophagous insects (Helopeltis sp.) |
| 3 | Mild infection | 0.06–0.16 | 967 | Distortion of foliage and shoots dieback | Sap-sucking insect (Helopeltis sp.) |
| 4 | Healthy | 0.17–2.00 | 10,090 | No sign of infestation on leaves and trunk |
| Early Monitoring Measurement (EIM) | VARI-Green Analysis | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Plot No. | Up Slope (°) | Down Slope (°) | Plot Radius (M) | Live Trees | Dead Trees | Missing Tree (Qty) | Live Trees | Dead (Class 1) | Severe (Class 2) | Mild (Class 3) | Health (Class 4) | Missing Trees (Qty) |
| 1 | 5 | 6 | 11.29 | 37 | 4 | 4 | 36 | 1 | - | 8 | 27 | 10 |
| 2 | 23 | 22 | 11.41 | 41 | - | 2 | 33 | - | 1 | 1 | 31 | 9 |
| 3 | 33 | 21 | 11.48 | 41 | 3 | 1 | 30 | - | - | - | 30 | 15 |
| 4 | 38 | 38 | 11.68 | 46 | 1 | 1 | 34 | - | - | - | 34 | 11 |
| 5 | 22 | 25 | 11.44 | 46 | 1 | - | 13 | - | - | - | 13 | 14 |
| 6 | 5 | 15 | 11.31 | 46 | - | - | 23 | - | - | 3 | 20 | 16 |
| 7 | 28 | 22 | 11.44 | 47 | 1 | 2 | 37 | - | - | - | 37 | 8 |
| 8 | 15 | 22 | 11.38 | 43 | - | - | 31 | - | - | 1 | 30 | 12 |
| 9 | 21 | 25 | 11.44 | 49 | 1 | - | 29 | - | - | - | 29 | 11 |
| 10 | 40 | 28 | 11.57 | 46 | 2 | 1 | 34 | - | - | 4 | 34 | 11 |
| 11 | 25 | 25 | 11.48 | 46 | 1 | - | 36 | - | - | 36 | 7 | |
| 12 | 25 | 20 | 11.44 | 48 | - | - | 35 | - | - | 5 | 30 | 6 |
| 13 | 30 | 33 | 11.57 | 48 | - | - | 24 | - | - | 1 | 23 | 14 |
| 14 | 26 | 24 | 11.48 | 47 | - | 1 | 32 | - | - | - | 32 | 9 |
| 15 | 25 | 21 | 11.44 | 46 | 1 | 2 | 35 | - | - | 1 | 34 | 11 |
| 16 | 38 | 30 | 11.62 | 45 | 2 | - | 31 | - | - | 4 | 27 | 12 |
| 17 | 27 | 25 | 11.48 | 35 | 3 | 4 | 34 | - | - | 13 | 21 | 5 |
| 18 | 30 | 20 | 11.48 | 43 | 1 | 1 | 26 | - | - | - | 26 | 14 |
| 19 | 23 | 35 | 11.53 | 51 | - | - | 36 | - | - | 2 | 34 | 10 |
| 20 | 30 | 30 | 11.57 | 48 | - | - | 35 | - | - | - | 35 | 6 |
| 21 | 17 | 15 | 11.35 | 43 | - | - | 36 | - | - | 3 | 33 | 6 |
| 22 | 12 | 17 | 11.33 | 45 | - | - | 26 | - | - | 6 | 20 | 11 |
| 23 | 17 | 13 | 11.35 | 39 | 1 | 2 | 28 | - | - | 5 | 23 | 12 |
| 24 | 17 | 13 | 11.35 | 39 | 3 | 2 | 28 | - | - | 1 | 27 | 15 |
| 1065 | 25 | 23 | 742 | 1 | 1 | 58 | 686 | 255 | ||||
| Predict | Class 1 | Class 2 | Class 3 | Class 4 | Total | User Accuracy |
|---|---|---|---|---|---|---|
| Dead | 7.00 | 1.00 | 0.00 | 0.00 | 8.00 | 0.86 |
| Severe | 0.00 | 5.00 | 67.00 | 154.00 | 226.00 | 0.02 |
| Mild | 0.00 | 1.00 | 939.00 | 627.00 | 1567.00 | 0.60 |
| Health | 0.00 | 0.00 | 156.00 | 9112.00 | 9268.00 | 0.98 |
| Total | 7.00 | 7.00 | 1162.00 | 9893.00 | 11,069.00 | |
| Producer Accuracy | 1.00 | 0.71 | 0.81 | 0.92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Megat Mohamed Nazir, M.N.; Terhem, R.; Norhisham, A.R.; Mohd Razali, S.; Meder, R. Early Monitoring of Health Status of Plantation-Grown Eucalyptus pellita at Large Spatial Scale via Visible Spectrum Imaging of Canopy Foliage Using Unmanned Aerial Vehicles. Forests 2021, 12, 1393. https://doi.org/10.3390/f12101393
Megat Mohamed Nazir MN, Terhem R, Norhisham AR, Mohd Razali S, Meder R. Early Monitoring of Health Status of Plantation-Grown Eucalyptus pellita at Large Spatial Scale via Visible Spectrum Imaging of Canopy Foliage Using Unmanned Aerial Vehicles. Forests. 2021; 12(10):1393. https://doi.org/10.3390/f12101393
Chicago/Turabian StyleMegat Mohamed Nazir, Megat Najib, Razak Terhem, Ahmad R. Norhisham, Sheriza Mohd Razali, and Roger Meder. 2021. "Early Monitoring of Health Status of Plantation-Grown Eucalyptus pellita at Large Spatial Scale via Visible Spectrum Imaging of Canopy Foliage Using Unmanned Aerial Vehicles" Forests 12, no. 10: 1393. https://doi.org/10.3390/f12101393
APA StyleMegat Mohamed Nazir, M. N., Terhem, R., Norhisham, A. R., Mohd Razali, S., & Meder, R. (2021). Early Monitoring of Health Status of Plantation-Grown Eucalyptus pellita at Large Spatial Scale via Visible Spectrum Imaging of Canopy Foliage Using Unmanned Aerial Vehicles. Forests, 12(10), 1393. https://doi.org/10.3390/f12101393