

Application of a Machine Learning Method for Prediction of Urban Neighborhood-Scale Air Pollution

_Kwan_Ngok_Yu.png)
Abstract
1. Introduction
2. Materials and Methods
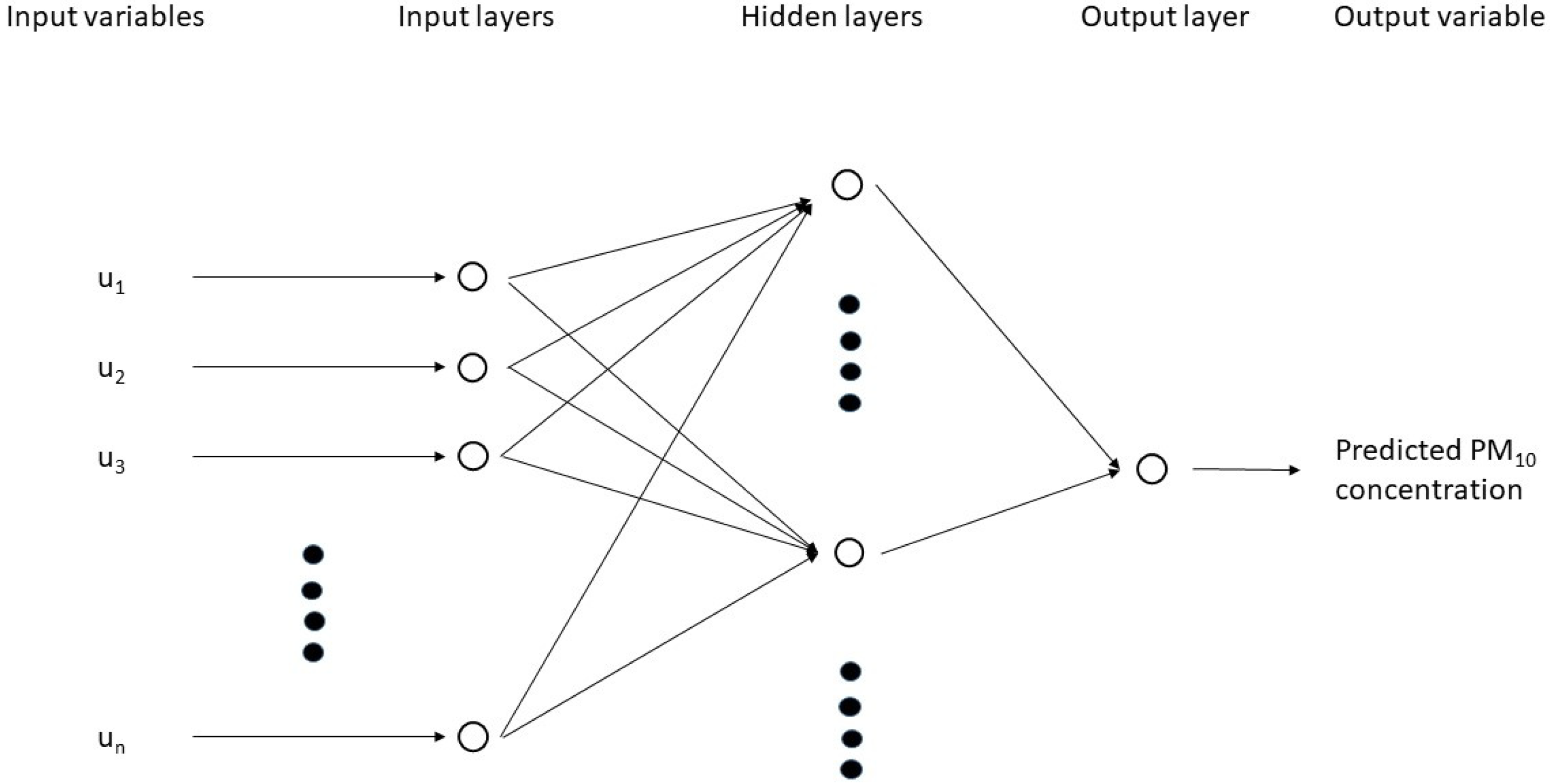
2.1. Artificial Neural Network (ANN) Model
2.2. Computational Fluid Dynamics (CFD) Model
3. Results and Discussion
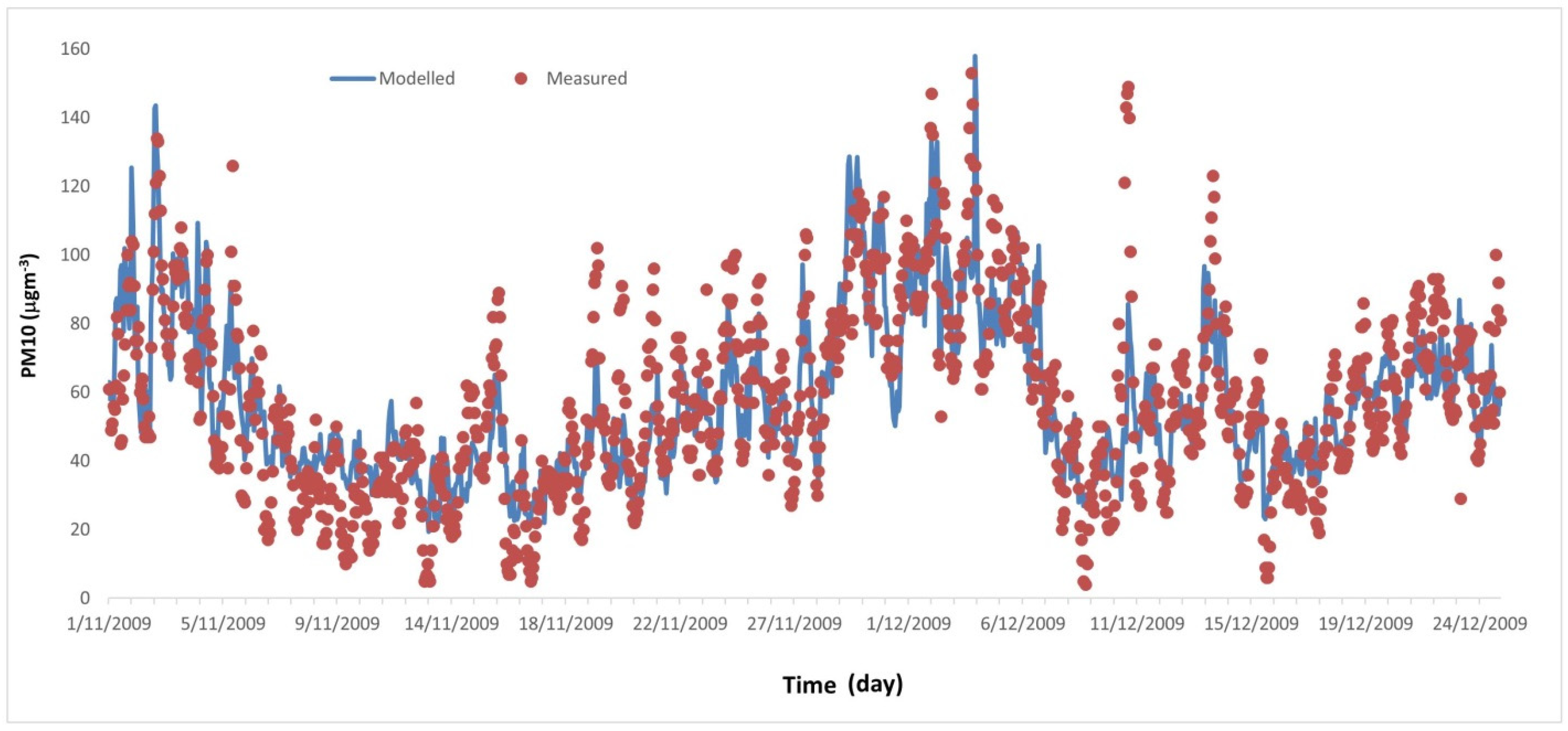
3.1. Results of the ANN Model
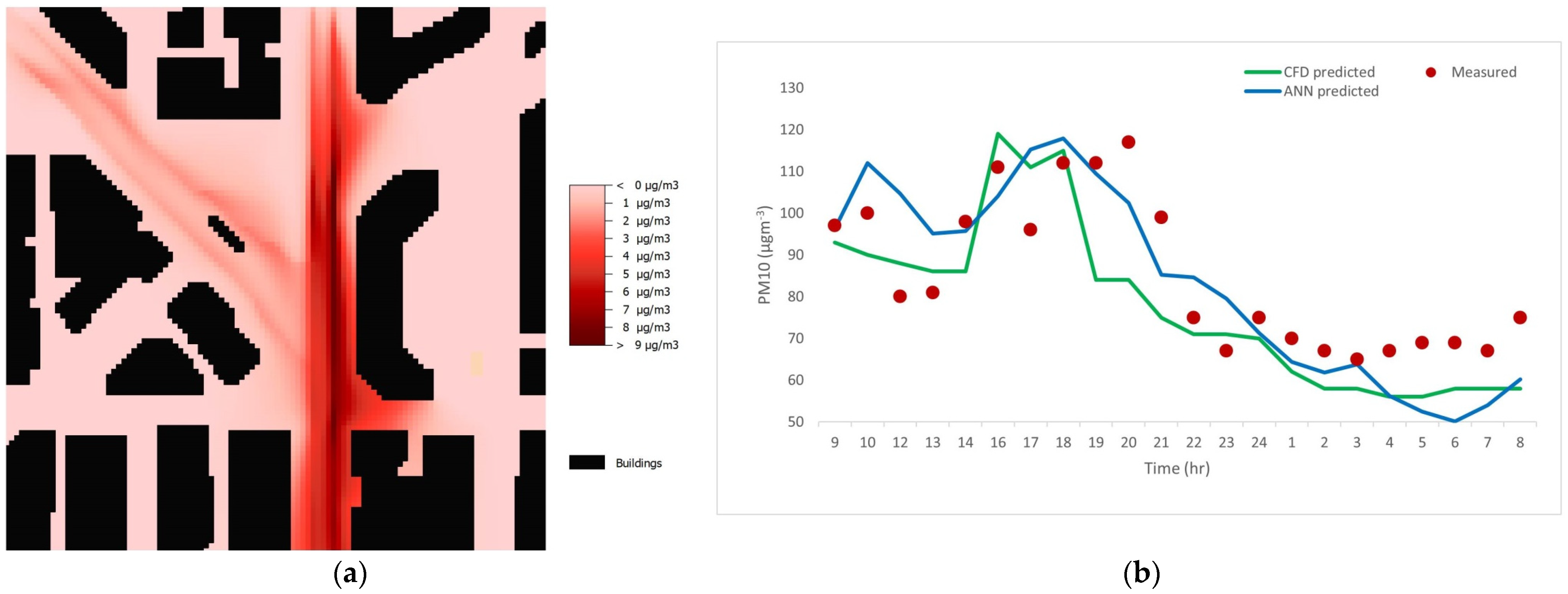
3.2. Results of CFD Model
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pope, C.A., III. Review: Epidemiological Basis for Particulate Air Pollution Health Standards. Aerosol Sci. Technol. 2000, 32, 4–14. [Google Scholar] [CrossRef]
- WHO. Health Effects of Particulate Matter: Policy Implications for Countries in Eastern Europe, Caucasus and Central ASIA. 2013. Available online: https://www.euro.who.int/__data/assets/pdf_file/0006/189051/Health-effects-of-particulate-matter-final-Eng.pdf (accessed on 17 July 2022).
- Huang, D.; Xu, J.; Zhang, S. Valuing the health risks of particulate air pollution in the Pearl River Delta, China. Environ. Sci. Policy 2012, 15, 38–47. [Google Scholar] [CrossRef]
- Morawska, L.; Thomas, S.; Gilbert, D.; Greenaway, C.; Rijnders, E. A study of the horizontal and vertical profile of submicrometer particles in relation to a busy road. Atmos. Environ. 1999, 33, 1261–1274. [Google Scholar] [CrossRef]
- Wai, K.M.; Tanner, P.A. Relationship between ionic composition in PM10 and the synoptic-scale and mesoscale weather conditions in a south China coastal city: A 4-year study. J. Geophys. Res. 2005, 110, D18210. [Google Scholar] [CrossRef]
- GovHK, Air Quality in Hong Kong. Available online: https://www.gov.hk/en/residents/environment/air/airquality.htm (accessed on 22 July 2022).
- Hillman, B.; Unger, J. Editorial—The Urbanisation of Rural China. China Perspect. 2013, 3, 3. [Google Scholar] [CrossRef]
- Croitoru, C.; Nastase, I. A state of the art regarding urban air quality prediction models. In E3S Web of Conferences; EDP Sciences: Les Ulis, France, 2018; p. 01010. [Google Scholar]
- Hanna, S.R.; Brown, M.J.; Camelli, F.E.; Chan, S.T.; Coirier, W.J.; Hansen, O.R.; Huber, A.H.; Kim, S.; Reynolds, R.M. Detailed simulations of atmospheric flow and dispersion in downtown Manhattan: An application of five computational fluid dynamics models. Bull. Am. Meteorol. Soc. 2006, 87, 1713–1726. [Google Scholar] [CrossRef]
- Cimorelli, A.J.; Perry, S.G.; Venkatram, A.; Weil, J.C.; Paine, R.J.; Wilson, R.B.; Lee, R.F.; Peters, W.D.; Brode, R.W. AERMOD: A dispersion model for industrial source applications. Part I: General model formulation and boundary layer characterization. J. Appl. Meteorol. 2005, 44, 682–693. [Google Scholar] [CrossRef]
- Jittra, N.; Pinthong, N.; Thepanondh, S. Performance Evaluation of AERMOD and CALPUFF Air Dispersion Models in Industrial Complex Area. Air Soil Water Res. 2015, 8, 87–95. [Google Scholar] [CrossRef]
- Nelson, M.; Addepalli, B.; Hornsby, F.; Gowardhan, A.; Pardyjak, E.; Brown, M. Improvements to a fast-response urban wind model. In Proceedings of the 15th Joint Conference on the Applications of Air Pollution Meteorology with the A&WMA, New Orleans, LA, USA, 15–19 November 2008. [Google Scholar]
- Cao, X.; Tian, Y.; Shen, Y.; Wu, T.; Li, R.; Liu, X.; Yeerken, A.; Cui, Y.; Xue, Y.; Lian, A. Emission Variations of Primary Air Pollutants from Highway Vehicles and Implications during the COVID-19 Pandemic in Beijing, China. Int. J. Environ. Res. Public Health 2021, 18, 4019. [Google Scholar] [CrossRef] [PubMed]
- Chu, A.K.M.; Kwok, R.C.W.; Yu, K.N. Study of pollution dispersion in urban areas using Computational Fluid Dynamics (CFD) and Geographic Information System (GIS). Environ. Model. Soft. 2005, 20, 273–277. [Google Scholar] [CrossRef]
- Houda, S.; Belarbi, R.; Zemmouri, N. A CFD Comsol model for simulating complex urban flow. Energy Procedia 2017, 139, 373–378. [Google Scholar] [CrossRef]
- Wai, K.-M.; Yuan, C.; Lai, A.; Yu, P.K. Relationship between pedestrian-level outdoor thermal comfort and building morphology in a high-density city. Sci. Total Environ. 2020, 708, 134516. [Google Scholar] [CrossRef] [PubMed]
- Aflaki, A.; Esfandiari, M.; Mohammadi, S. A Review of Numerical Simulation as a Precedence Method for Prediction and Evaluation of Building Ventilation Performance. Sustainability 2021, 13, 12721. [Google Scholar] [CrossRef]
- Feng, R.; Zheng, H.J.; Gao, H.; Zhang, A.R.; Huang, C.; Zhang, J.X.; Luo, K.; Fan, J.R. Recurrent Neural Network and random forest for analysis and accurate forecast of atmospheric pollutants: A case study in Hangzhou, China. J. Clean. Prod. 2019, 231, 1005–1015. [Google Scholar] [CrossRef]
- Bozdağ, A.; Dokuz, Y.; Gökçek, Q.B. Spatial prediction of PM10 concentration using machine learning algorithms in Ankara, Turkey, Environ. Poll. 2020, 263, 114635. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.; Ren, X.; Xiong, K. Analysis of the driving factors of PM2.5 concentration in the air: A case study of the Yangtze River Delta, China. Ecol. Indicat. 2020, 110, 105889. [Google Scholar] [CrossRef]
- Krishan, M.; Jha, S.; Das, J.; Singh, A.; Goyal, M.K.; Sekar, C. Air quality modelling using long short-term memory (LSTM) over NCT-Delhi, India. Air Qual. Atmos. Health 2019, 12, 899–908. [Google Scholar] [CrossRef]
- Qin, Z.; Chen, C.; Guo, X. Prediction of Air Quality Based on KNN-LSTM. J. Phys. Conf. Ser. 2019, 1237, 042030. [Google Scholar] [CrossRef]
- Wang, Y.; Du, Y.; Wang, J.; Li, T. Calibration of a low-cost PM2.5 monitor using a random forest model. Environ. Int. 2019, 133A, 105161. [Google Scholar]
- Saxena, A.; Shekhawat, S. Ambient air quality classification by grey wolf optimizer based support vector machine. J. Environ. Public Health 2017, 2017, 3131083. [Google Scholar] [CrossRef]
- Bai, Y.; Li, Y.; Wang, X.; Xie, J.; Li, C. Air pollutants concentrations forecasting using back propagation neural network based on wavelet decomposition with meteorological conditions. Atmos. Poll. Res. 2016, 7, 557–566. [Google Scholar] [CrossRef]
- Ma, D.; Zhang, Z. Contaminant dispersion prediction and source estimation with integrated Gaussian-machine learning network model for point source emission in atmosphere. J. Hazard. Mater. 2016, 311, 237–245. [Google Scholar] [CrossRef] [PubMed]
- Bishop, C.M. Neural Networks for Pattern Recognition; Clarendon Press: Oxford, UK, 1995. [Google Scholar]
- Yang, J. Intelligent Data Mining Using Artificial Neural Networks and Genetic Algorithms: Techniques and Applications. 2010. Available online: http://wrap.warwick.ac.uk/3831/1/WRAP_THESIS_Yang_2010.pdf (accessed on 17 July 2022).
- Nielsen, R. The backpropagation neural network. Int. Jt. Conf. Neural Netw. 1989, 1, 593–605. [Google Scholar]
- Azid, A.; Juahir, H.; Latif, M.T.; Zain, S.M.; Osman, M.R. Feed-Forward Artificial Neural Network Model for Air Pollutant Index Prediction in the Southern Region of Peninsular Malaysia. J. Environ. Prot. 2013, 4, 1–10. [Google Scholar] [CrossRef]
- Bruse, M.; Fleer, H. Simulating surface–plant–air interactions inside urban environments with a three dimensional numerical model. Environ. Model. Softw. 1998, 13, 373–384. [Google Scholar] [CrossRef]
- Deng, S.; Ma, J.; Zhang, L.; Jia, Z.; Ma, L. Microclimate simulation and model optimization of the effect of roadway green space on atmospheric particulate matter. Environ. Poll. 2019, 246, 932–944. [Google Scholar] [CrossRef] [PubMed]
- Taleghani, M.; Clark, A.; Swan, W. Air pollution in a microclimate; the impact of different green barriers on the dispersion. Sci. Total Environ. 2020, 711, 134649. [Google Scholar] [CrossRef] [PubMed]
- Bruse, M. Particle filtering capacity of urban vegetation: A microscale numerical approach. Berl. Geogr. Arb. 2007, 109, 61–70. [Google Scholar]
- Wai, K.M.; Tan, T.Z.; Morakinyo, T.E.; Chan, T.C.; Lai, A. Reduced effectiveness of tree planting on micro-climate cooling due to ozone pollution—A modeling study, Sustain. Cities Soc. 2020, 52, 101803. [Google Scholar] [CrossRef]
- TD. The annual traffic census—2009, Transport Department of the Hong Kong Special Administrative Region Government. 2009. Available online: https://www.td.gov.hk/en/publications_and_press_releases/publications/free_publications/the_annual_traffic_census_2009/index.html (accessed on 20 January 2023).
- Ketzel, M.; Omstedt, G.; Johansson, C.; Düring, I.; Pohjola, M.; Oettl, D.; Gidhagen, L.; Wåhlin, P.; Lohmeyer, A.; Haakana, M.; et al. Estimation and validation of PM2.5/PM10 exhaust and non-exhaust emission factors for practical street pollution modelling. Atmos. Environ. 2007, 41, 9370–9385. [Google Scholar] [CrossRef]
- Maerschalck, B.; Janssen, S.; Vankerkom, J.; Mensink, C.; van den Burg, A.; Fortuin, P. CFD simulations of the impact of a line vegetation element along a motorway. In Proceedings of the 12th Conference on Harmonisation Within Atmospheric Dispersion Modelling for Regulatory Purposes (HARMO12), Cavtat, Croatia, 6–9 October 2008. [Google Scholar]
- Librando, V.; Tringali, G.; Calastrini, F.; Gualtieri, G. Simulating the production and dispersion of environmental pollutants in aerosol phase in an urban area of great historical and cultural value. Environ. Monit. Assess. 2009, 158, 479–498. [Google Scholar] [CrossRef]
- Potoglou, D.; Kanaroglou, P.S. Carbon monoxide emissions from passenger vehicles: Predictive mapping with an application to Hamilton, Canada, Transp. Res. D Transp. Environ. 2005, 10, 97–109. [Google Scholar] [CrossRef]
- McAlpine, J.D.; Ruby, M. Using CFD to Study Air Quality in Urban Microenvironments. In Environmental Sciences and Environmental Computing; Zannetti, P., Ed.; The EnviroComp Institute: Fremont, CA, USA, 2004; Volume II, Chapter 1. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | |
|---|---|
| Input layer | Number of neurons: 11 Background wind speed Background wind direction Background air temperature Background PM10 concentration Atmospheric pressure Rainfall Canyon wind speed Canyon wind direction Canyon air temperature Dates of a week Weekday/weekend |
| Hidden Layer | Number of neurons: Nhidden = 2Ninput + 1 |
| Output Layer | Number of neurons: 1 |
| Transfer function for hidden layer | Tangent Sigmoid |
| Transfer function for output layer | Linear |
| Training method | Goal: minimum MSE Epoch: 1000 times Algorithm: Levenberg–Marquardt |
| Dataset | Total size: 8616 |
| Data for training: 70% | |
| Data for validation: 15% | |
| Data for testing: 15% |
| Parameters | Remarks/Values 1 |
|---|---|
| Meteorological conditions (wind speed, wind direction, relative humidity, and air temperature) | Hourly local measurements |
| Boundary condition for PM10 Pollution source Source emission factor for PM10 | 0 μg m−3, since PM10 enhancement due to traffic was modeled Line sources with a height of 0.3 m above the ground 105 μg veh−1 m−1 |
| Model | R | FB | RMSE | MAE |
|---|---|---|---|---|
| ANN | 0.84 | 0.02 | 12.2 | 10.4 |
| CFD | 0.81 | 0.09 | 13.7 | 11.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wai, K.-M.; Yu, P.K.N. Application of a Machine Learning Method for Prediction of Urban Neighborhood-Scale Air Pollution. Int. J. Environ. Res. Public Health 2023, 20, 2412. https://doi.org/10.3390/ijerph20032412
Wai K-M, Yu PKN. Application of a Machine Learning Method for Prediction of Urban Neighborhood-Scale Air Pollution. International Journal of Environmental Research and Public Health. 2023; 20(3):2412. https://doi.org/10.3390/ijerph20032412
Chicago/Turabian StyleWai, Ka-Ming, and Peter K. N. Yu. 2023. "Application of a Machine Learning Method for Prediction of Urban Neighborhood-Scale Air Pollution" International Journal of Environmental Research and Public Health 20, no. 3: 2412. https://doi.org/10.3390/ijerph20032412
APA StyleWai, K.-M., & Yu, P. K. N. (2023). Application of a Machine Learning Method for Prediction of Urban Neighborhood-Scale Air Pollution. International Journal of Environmental Research and Public Health, 20(3), 2412. https://doi.org/10.3390/ijerph20032412