
Regional Prediction of Ozone and Fine Particulate Matter Using Diffusion Convolutional Recurrent Neural Network



Abstract
:1. Introduction
2. Data and Methods
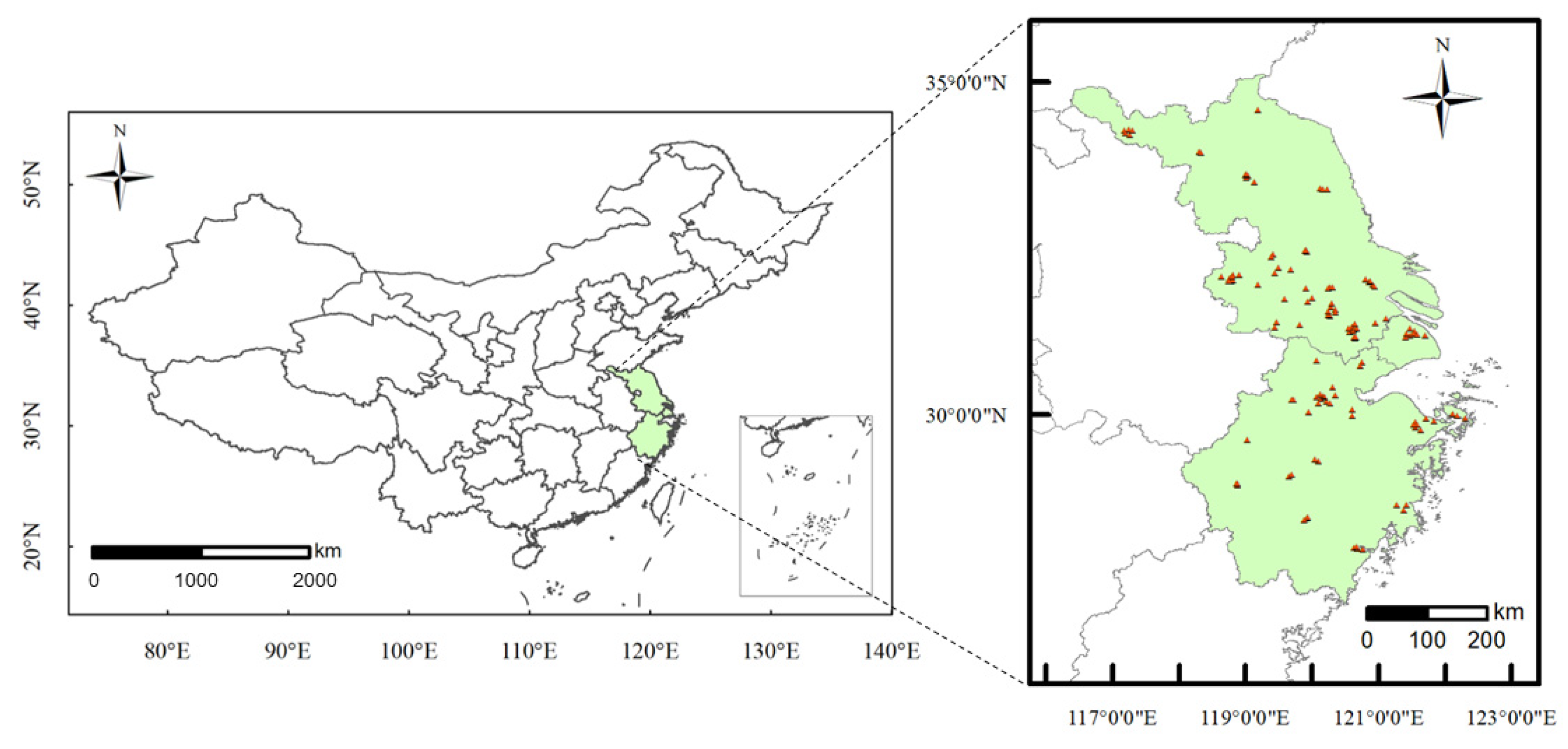
2.1. Data Description
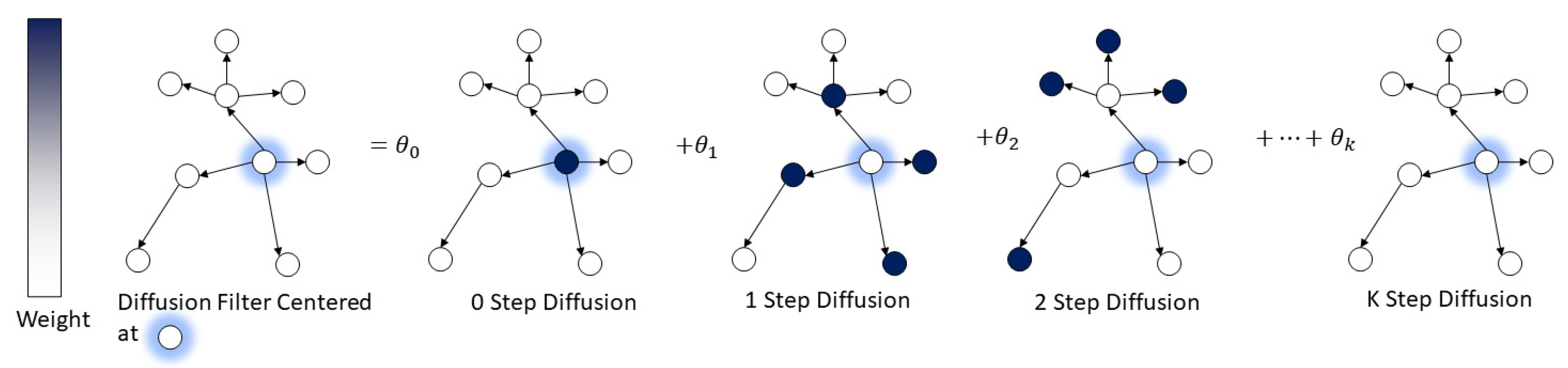
2.2. Diffusion Convolution
2.3. Diffusion Convolutional Recurrent Neural Network (DCRNN)
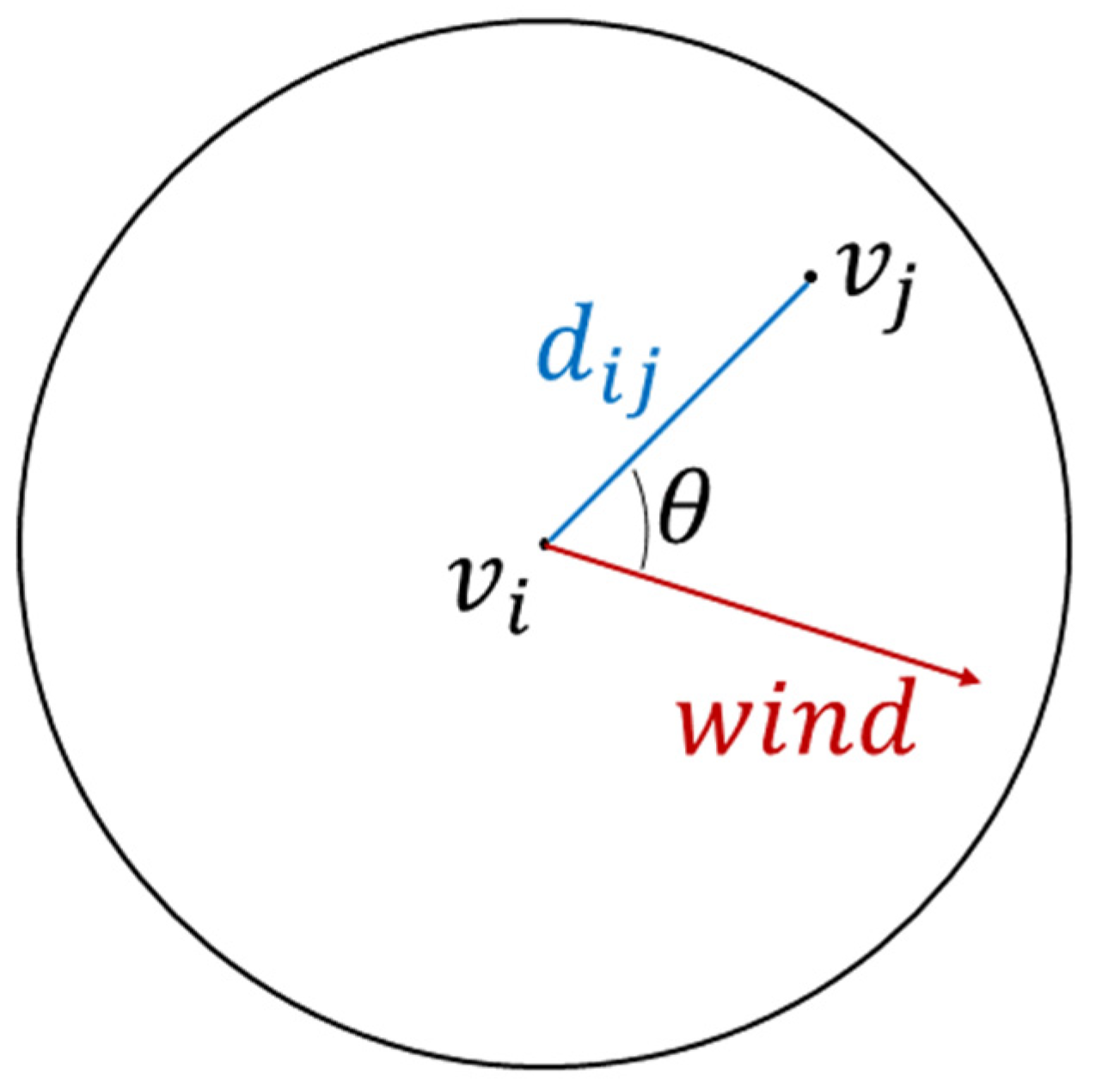
2.4. Graph Construction
2.5. Experimental Design
3. Results and Discussion
3.1. Prediction Performances of DCRNN Using Different Graph Construction Methods
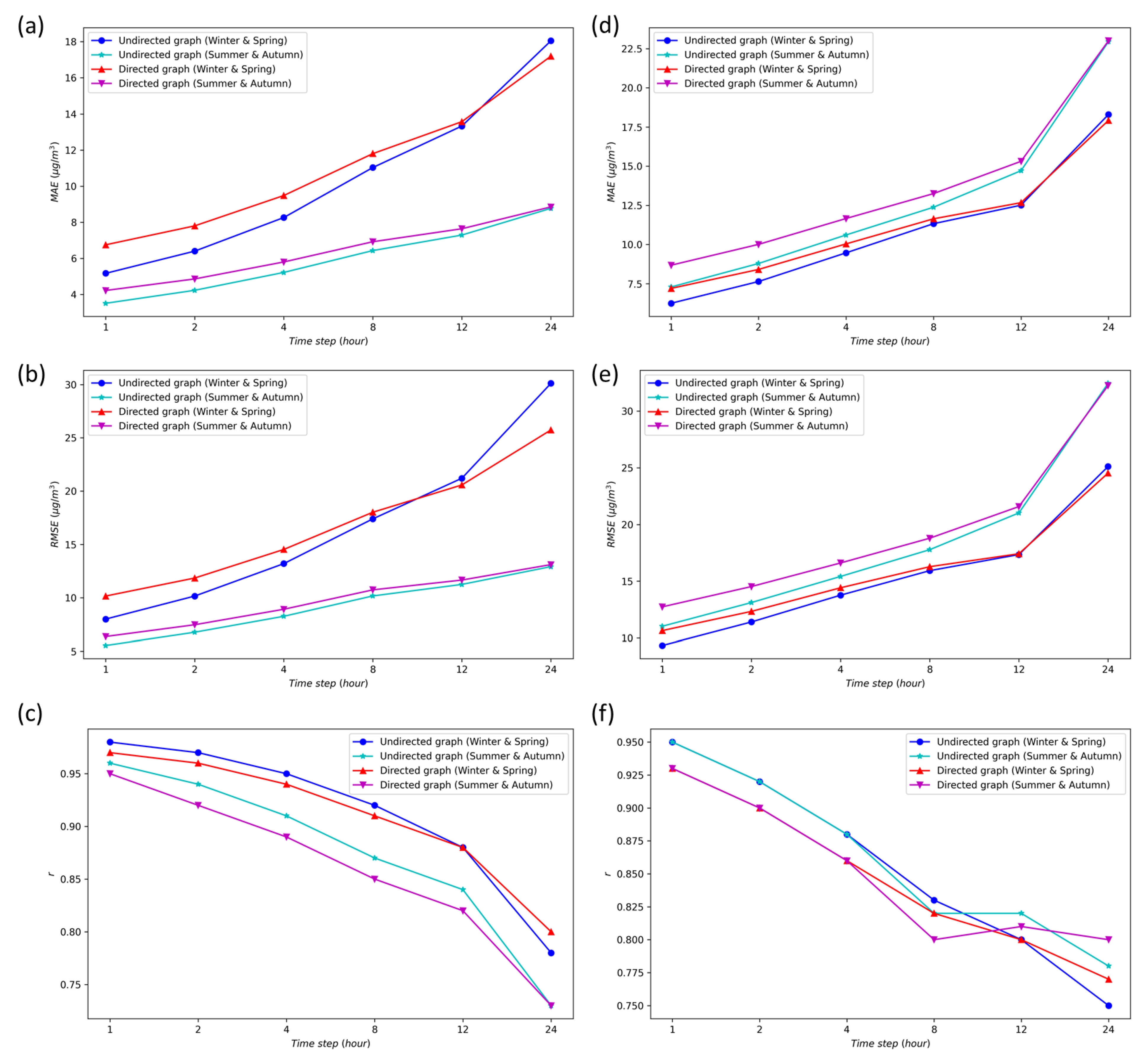
3.2. Multi Time-Step Prediction
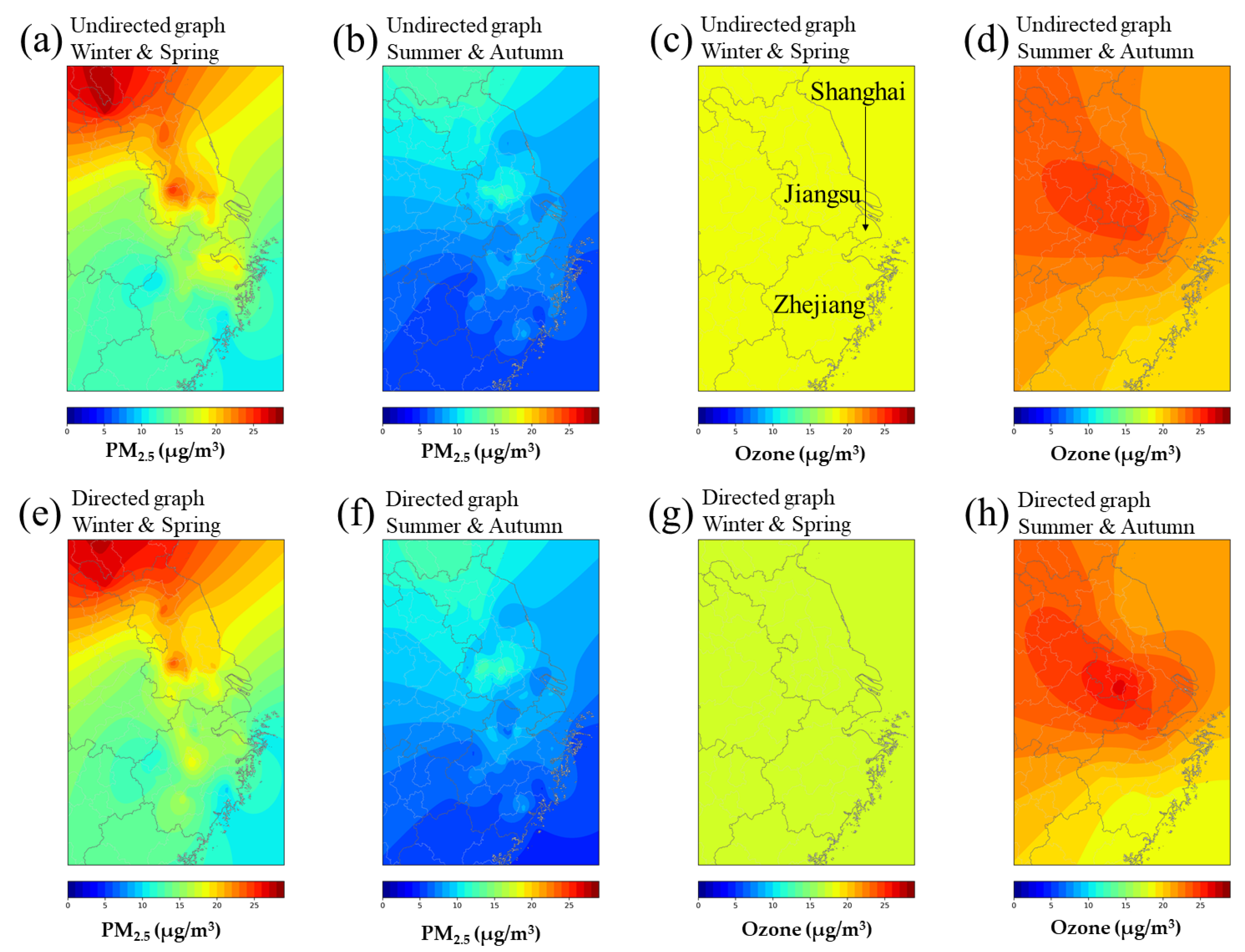
3.3. Spatial Distributions of PM2.5 and Ozone Forecasts based on the DCRNN Model
4. Conclusions
- (1)
- The DCRNN model outperforms the baseline models (e.g., GRU and LSTM) in PM2.5 and ozone forecasts.
- (2)
- The DCRNN model using directed graphs with an integration of wind factors outperforms the undirected graph model in the long-term prediction of PM2.5 and ozone.
- (3)
- The undirected graph model could achieve better performance in the short-term forecasts, particularly for the next 1st hour prediction.
- (4)
- The prediction errors of the DCRNN model using undirected and directed graphs both suggest an upward trend with an increase in the prediction time steps, particularly for the undirected graph model.
- (5)
- The monitoring stations that are sparsely distributed or located in heavily polluted areas could both cause lower prediction accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chan, C.K.; Yao, X. Air Pollution in Mega Cities in China. Atmos. Environ. 2008, 42, 1–42. [Google Scholar] [CrossRef]
- Gao, J.; Woodward, A.; Vardoulakis, S.; Kovats, S.; Wilkinson, P.; Li, L.; Xu, L.; Li, J.; Yang, J.; Li, J.; et al. Haze, Public Health and Mitigation Measures in China: A Review of the Current Evidence for Further Policy Response. Sci. Total Environ. 2017, 578, 148–157. [Google Scholar] [CrossRef] [PubMed]
- Laden, F.; Schwartz, J.; Speizer, F.E.; Dockery, D.W. Reduction in Fine Particulate Air Pollution and Mortality: Extended Follow-up of the Harvard Six Cities Study. Am. J. Respir. Crit. Care Med. 2006, 173, 667–672. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Wang, X.; Maher, B.A.; Li, F.; Xu, C.; Liu, X.; Sun, X.; Zhang, Z. The Spatial-Temporal Characteristics and Health Impacts of Ambient Fine Particulate Matter in China. J. Clean. Prod. 2016, 112, 1312–1318. [Google Scholar] [CrossRef]
- Pui, D.Y.H.; Chen, S.C.; Zuo, Z. PM2.5 in China: Measurements, Sources, Visibility and Health Effects, and Mitigation. Particuology 2014, 13, 1–26. [Google Scholar] [CrossRef]
- Brauer, M.; Freedman, G.; Frostad, J.; Van Donkelaar, A.; Martin, R.V.; Dentener, F.; Dingenen, R.V.; Estep, K.; Amini, H.; Apte, J.S.; et al. Ambient Air Pollution Exposure Estimation for the Global Burden of Disease 2013. Environ. Sci. Technol. 2016, 50, 79–88. [Google Scholar] [CrossRef]
- Wang, T.; Xue, L.; Brimblecombe, P.; Lam, Y.F.; Li, L.; Zhang, L. Ozone Pollution in China: A Review of Concentrations, Meteorological Influences, Chemical Precursors, and Effects. Sci. Total Environ. 2017, 575, 1582–1596. [Google Scholar] [CrossRef] [PubMed]
- Skamarock, W.C.; Klemp, J.; Dudhia, J.; Gill, D.O.; Barker, D.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3. Univ. Corp. Atmos. Res. 2008, 27, 3–27. [Google Scholar]
- Grell, G.A.; Peckham, S.E.; Schmitz, R.; McKeen, S.A.; Frost, G.; Skamarock, W.C.; Eder, B. Fully Coupled “Online” Chemistry within the WRF Model. Atmos. Environ. 2005, 39, 6957–6975. [Google Scholar] [CrossRef]
- Byun, D.W.; Schere, K.L. Review of the Governing Equations, Computational Algorithms, and Other Components of the Models-3 Community Multiscale Air Quality (CMAQ) Modeling System. Appl. Mech. Rev. 2006, 59, 51–77. [Google Scholar] [CrossRef]
- Ni, X.Y.; Huang, H.; Du, W.P. Relevance Analysis and Short-Term Prediction of PM2.5concentrations in Beijing Based on Multi-Source Data. Atmos. Environ. 2017, 150, 146–161. [Google Scholar] [CrossRef]
- Yang, W.; Deng, M.; Xu, F.; Wang, H. Prediction of Hourly PM2.5 Using a Space-Time Support Vector Regression Model. Atmos. Environ. 2018, 181, 12–19. [Google Scholar] [CrossRef]
- Shang, Z.; Deng, T.; He, J.; Duan, X. A Novel Model for Hourly PM2.5 Concentration Prediction Based on CART and EELM. Sci. Total Environ. 2019, 651, 3043–3052. [Google Scholar] [CrossRef] [PubMed]
- Feng, R.; Zheng, H.J.; Gao, H.; Zhang, A.; Huang, C.; Zhang, J.; Luo, K.; Fan, J. Recurrent Neural Network and Random Forest for Analysis and Accurate Forecast of Atmospheric Pollutants: A Case Study in Hangzhou, China. J. Clean. Prod. 2019, 231, 1005–1015. [Google Scholar] [CrossRef]
- Li, X.; Peng, L.; Yao, X.; Cui, S.; Hu, Y.; You, C.; Chi, T. Long Short-Term Memory Neural Network for Air Pollutant Concentration Predictions: Method Development and Evaluation. Environ. Pollut. 2017, 231, 997–1004. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Chang, F.; Chang, L.; Kao, I.; Wang, Y. Explore a Deep Learning Multi-Output Neural Network for Regional Multi-Step-Ahead Air Quality Forecasts. J. Clean. Prod. 2019, 209, 134–145. [Google Scholar] [CrossRef]
- Huang, Y.; Shen, L.; Liu, H. Grey Relational Analysis, Principal Component Analysis and Forecasting of Carbon Emissions Based on Long Short-Term Memory in China. J. Clean. Prod. 2019, 209, 415–423. [Google Scholar] [CrossRef]
- Li, L.L.; Wen, S.Y.; Tseng, M.L.; Wang, C.S. Renewable Energy Prediction: A Novel Short-Term Prediction Model of Photovoltaic Output Power. J. Clean. Prod. 2019, 228, 359–375. [Google Scholar] [CrossRef]
- Chang, Y.S.; Chiao, H.T.; Abimannan, S.; Huang, Y.P.; Tsai, Y.T.; Lin, K.M. An LSTM-Based Aggregated Model for Air Pollution Forecasting. Atmos. Pollut. Res. 2020, 11, 1451–1463. [Google Scholar] [CrossRef]
- Athira, V.; Geetha, P.; Vinayakumar, R.; Soman, K.P. DeepAirNet: Applying Recurrent Networks for Air Quality Prediction. Procedia Comput. Sci. 2018, 132, 1394–1403. [Google Scholar] [CrossRef]
- Zhang, K.; Thé, J.; Xie, G.; Yu, H. Multi-Step Ahead Forecasting of Regional Air Quality Using Spatial-Temporal Deep Neural Networks: A Case Study of Huaihai Economic Zone. J. Clean. Prod. 2020, 277, 123231. [Google Scholar] [CrossRef]
- Wen, C.; Liu, S.; Yao, X.; Peng, L.; Li, X.; Hu, Y.; Chi, T. A Novel Spatiotemporal Convolutional Long Short-Term Neural Network for Air Pollution Prediction. Sci. Total Environ. 2019, 654, 1091–1099. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.-Y.; Wong, W.; Woo, W. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. Adv. Neural Inf. Processing Syst. 2015, 1, 802–810. [Google Scholar]
- Lin, Y.; Mago, N.; Gao, Y.; Li, Y.; Chiang, Y.Y.; Shahabi, C.; Ambite, J.L. Exploiting Spatiotemporal Patterns for Accurate Air Quality Forecasting Using Deep Learning. In Proceedings of the 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 6–9 November 2018; pp. 359–368. [Google Scholar] [CrossRef]
- Ouyang, X.; Yang, Y.; Zhang, Y.; Zhou, W. Spatial-Temporal Dynamic Graph Convolution Neural Network for Air Quality Prediction. In Proceedings of the 2021 International Joint Conference on Neural Networks, Shenzhen, China, 18–22 July 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Qi, Y.; Li, Q.; Karimian, H.; Liu, D. A Hybrid Model for Spatiotemporal Forecasting of PM2.5 Based on Graph Convolutional Neural Network and Long Short-Term Memory. Sci. Total Environ. 2019, 664, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Yu, R.; Shahabi, C.; Liu, Y. Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting. In 6th International Conference on Learning Representations, Proceedings of the ICLR 2018—Conference Track Proceedings, Vancouver, BC, Canada, 30 April–3 May 2018; pp. 1–16.
- Cho, K.; van Merrienboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representatxions Using RNN Encoder–Decoder for Statistical Machine Translation. In Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing (EMNLP), Doha, Qatar, 25–29 October 2014; pp. 1724–1734. [Google Scholar] [CrossRef]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to Sequence Learning with Neural Networks. Adv. Neural Inf. Processing Syst. 2014, 2, 3104–3112. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Winter and Spring | Summer and Autumn | ||||
|---|---|---|---|---|---|---|
| MAE (μg/m3) | RMSE (μg/m3) | r | MAE (μg/m3) | RMSE (μg/m3) | r | |
| GRU | 23.07 | 33.35 | 0.62 | 11.69 | 16.36 | 0.53 |
| LSTM | 22.82 | 32.93 | 0.63 | 12.15 | 16.60 | 0.53 |
| Bidirectional LSTM | 19.79 | 28.98 | 0.73 | 10.31 | 14.71 | 0.64 |
| Seq2seq | 18.50 | 28.71 | 0.75 | 9.84 | 14.44 | 0.65 |
| DCRNN (undirected graph) | 18.05 | 30.11 | 0.79 | 8.76 | 12.92 | 0.73 |
| DCRNN (directed graph 1) | 17.01 | 26.23 | 0.79 | 8.95 | 13.24 | 0.72 |
| DCRNN (directed graph 2) | 17.73 | 27.23 | 0.79 | 9.08 | 13.33 | 0.72 |
| DCRNN (directed graph 3) | 16.82 | 25.73 | 0.80 | 8.92 | 13.10 | 0.72 |
| DCRNN (directed graph 4) | 16.37 | 25.13 | 0.81 | 8.92 | 13.09 | 0.73 |
| DCRNN (directed graph 5) | 17.20 | 25.74 | 0.80 | 8.85 | 13.11 | 0.73 |
| Model | Winter and Spring | Summer and Autumn | ||||
|---|---|---|---|---|---|---|
| MAE (μg/m3) | RMSE (μg/m3) | r | MAE (μg/m3) | RMSE (μg/m3) | r | |
| GRU | 21.60 | 28.12 | 0.70 | 28.18 | 37.40 | 0.72 |
| LSTM | 21.84 | 28.49 | 0.68 | 28.44 | 37.89 | 0.71 |
| Bidirectional LSTM | 20.03 | 26.59 | 0.72 | 26.83 | 36.02 | 0.74 |
| Seq2seq | 19.87 | 26.82 | 0.70 | 25.35 | 34.59 | 0.75 |
| DCRNN (undirected graph) | 18.30 | 25.11 | 0.76 | 22.95 | 32.44 | 0.78 |
| DCRNN (directed graph 1) | 18.85 | 26.08 | 0.75 | 22.71 | 32.07 | 0.80 |
| DCRNN (directed graph 2) | 18.45 | 25.21 | 0.76 | 23.94 | 33.72 | 0.78 |
| DCRNN (directed graph 3) | 17.74 | 24.34 | 0.77 | 23.34 | 33.06 | 0.79 |
| DCRNN (directed graph 4) | 17.99 | 24.61 | 0.77 | 23.40 | 32.97 | 0.79 |
| DCRNN (directed graph 5) | 17.92 | 24.53 | 0.77 | 23.00 | 32.24 | 0.80 |
| Data Group | Time-Step | Undirected Graph | Directed Graph | ||||
|---|---|---|---|---|---|---|---|
| MAE (μg/m3) | RMSE (μg/m3) | r | MAE (μg/m3) | RMSE (μg/m3) | r | ||
| Winter and Spring | 1 h | 5.17 | 8.00 | 0.98 | 6.75 | 10.16 | 0.97 |
| 2 h | 6.40 | 10.16 | 0.97 | 7.80 | 11.85 | 0.96 | |
| 4 h | 8.26 | 13.20 | 0.95 | 9.48 | 14.53 | 0.94 | |
| 8 h | 11.03 | 17.40 | 0.92 | 11.80 | 18.02 | 0.91 | |
| 12 h | 13.33 | 21.21 | 0.88 | 13.57 | 20.58 | 0.88 | |
| 24 h | 18.05 | 30.11 | 0.78 | 17.20 | 25.74 | 0.80 | |
| Summer and Autumn | 1 h | 3.51 | 5.54 | 0.96 | 4.22 | 6.37 | 0.95 |
| 2 h | 4.23 | 6.77 | 0.94 | 4.86 | 7.47 | 0.92 | |
| 4 h | 5.22 | 8.26 | 0.91 | 5.80 | 8.92 | 0.89 | |
| 8 h | 6.43 | 10.17 | 0.87 | 6.92 | 10.74 | 0.85 | |
| 12 h | 7.29 | 11.25 | 0.84 | 7.64 | 11.66 | 0.82 | |
| 24 h | 8.77 | 12.92 | 0.73 | 8.85 | 13.11 | 0.73 | |
| Data Group | Time-Step | Undirected Graph | Directed Graph | ||||
|---|---|---|---|---|---|---|---|
| MAE (μg/m3) | RMSE (μg/m3) | r | MAE (μg/m3) | RMSE (μg/m3) | r | ||
| Winter and Spring | 1 h | 6.25 | 9.35 | 0.95 | 7.20 | 10.65 | 0.93 |
| 2 h | 7.64 | 11.41 | 0.92 | 8.41 | 12.34 | 0.90 | |
| 4 h | 9.47 | 13.77 | 0.88 | 10.04 | 14.42 | 0.86 | |
| 8 h | 11.33 | 15.93 | 0.83 | 11.64 | 16.28 | 0.82 | |
| 12 h | 12.51 | 17.35 | 0.80 | 12.67 | 17.42 | 0.80 | |
| 24 h | 18.30 | 25.11 | 0.75 | 17.92 | 24.53 | 0.77 | |
| Summer and Autumn | 1 h | 7.29 | 11.03 | 0.95 | 8.68 | 12.74 | 0.93 |
| 2 h | 8.79 | 13.12 | 0.92 | 10.01 | 14.53 | 0.90 | |
| 4 h | 10.61 | 15.42 | 0.88 | 11.66 | 16.61 | 0.86 | |
| 8 h | 12.38 | 17.78 | 0.82 | 13.25 | 18.79 | 0.80 | |
| 12 h | 14.71 | 21.02 | 0.82 | 15.31 | 21.58 | 0.81 | |
| 24 h | 22.95 | 32.44 | 0.78 | 23.00 | 32.24 | 0.80 | |
| Data Group | Province | Undirected Graph | Directed Graph | ||||
|---|---|---|---|---|---|---|---|
| MAE (μg/m3) | RMSE (μg/m3) | r | MAE (μg/m3) | RMSE (μg/m3) | r | ||
| Winter and Spring | Shanghai | 16.79 | 28.63 | 0.76 | 15.44 | 23.10 | 0.77 |
| Jiangsu | 20.62 | 33.07 | 0.79 | 19.70 | 29.51 | 0.75 | |
| Zhejiang | 15.78 | 27.22 | 0.75 | 15.06 | 21.97 | 0.79 | |
| Summer and Autumn | Shanghai | 8.58 | 13.43 | 0.78 | 9.01 | 13.17 | 0.79 |
| Jiangsu | 9.91 | 14.13 | 0.72 | 9.94 | 14.33 | 0.71 | |
| Zhejiang | 7.68 | 11.67 | 0.72 | 7.80 | 11.83 | 0.71 | |
| Data Group | Province | Undirected Graph | Directed Graph | ||||
|---|---|---|---|---|---|---|---|
| MAE (μg/m3) | RMSE (μg/m3) | r | MAE (μg/m3) | RMSE (μg/m3) | r | ||
| Winter and Spring | Shanghai | 19.33 | 25.81 | 0.69 | 19.00 | 25.09 | 0.72 |
| Jiangsu | 18.36 | 25.10 | 0.75 | 17.25 | 23.51 | 0.79 | |
| Zhejiang | 18.11 | 25.03 | 0.76 | 18.41 | 25.38 | 0.76 | |
| Summer and Autumn | Shanghai | 22.16 | 32.00 | 0.77 | 24.25 | 33.88 | 0.75 |
| Jiangsu | 23.82 | 33.46 | 0.78 | 23.66 | 32.93 | 0.80 | |
| Zhejiang | 22.23 | 31.50 | 0.79 | 22.20 | 31.34 | 0.79 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Wang, H.-W.; Lu, K.-F.; Peng, Z.-R.; Zhao, J. Regional Prediction of Ozone and Fine Particulate Matter Using Diffusion Convolutional Recurrent Neural Network. Int. J. Environ. Res. Public Health 2022, 19, 3988. https://doi.org/10.3390/ijerph19073988
Wang D, Wang H-W, Lu K-F, Peng Z-R, Zhao J. Regional Prediction of Ozone and Fine Particulate Matter Using Diffusion Convolutional Recurrent Neural Network. International Journal of Environmental Research and Public Health. 2022; 19(7):3988. https://doi.org/10.3390/ijerph19073988
Chicago/Turabian StyleWang, Dongsheng, Hong-Wei Wang, Kai-Fa Lu, Zhong-Ren Peng, and Juanhao Zhao. 2022. "Regional Prediction of Ozone and Fine Particulate Matter Using Diffusion Convolutional Recurrent Neural Network" International Journal of Environmental Research and Public Health 19, no. 7: 3988. https://doi.org/10.3390/ijerph19073988
APA StyleWang, D., Wang, H.-W., Lu, K.-F., Peng, Z.-R., & Zhao, J. (2022). Regional Prediction of Ozone and Fine Particulate Matter Using Diffusion Convolutional Recurrent Neural Network. International Journal of Environmental Research and Public Health, 19(7), 3988. https://doi.org/10.3390/ijerph19073988