
A Practical Risk-Based Model for Early Warning of Seafarer Errors Using Integrated Bayesian Network and SPAR-H



Abstract
:Highlights
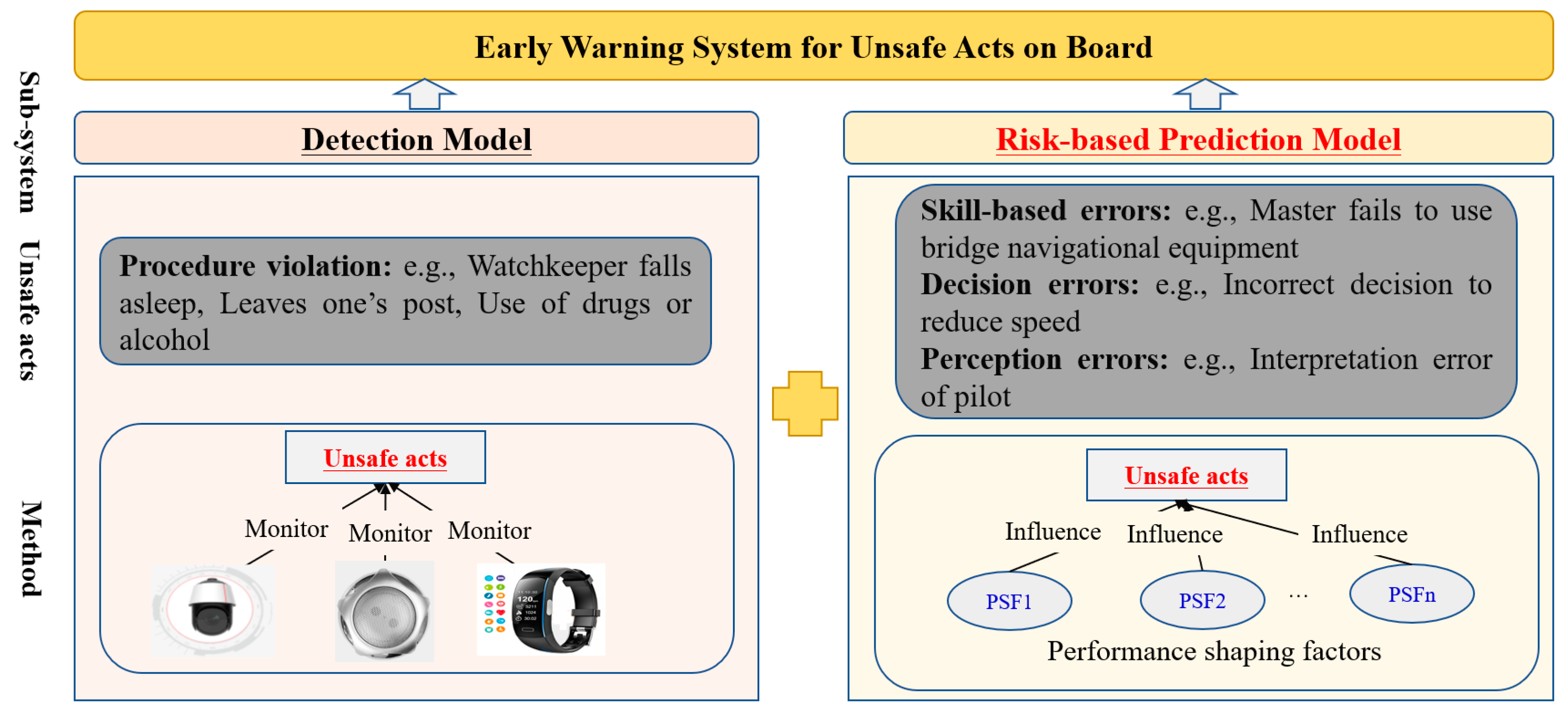
- A BN version of the SPAR-H model is used to predict and warn of human errors to avoid maritime accidents and ensure the safety of seafarers.
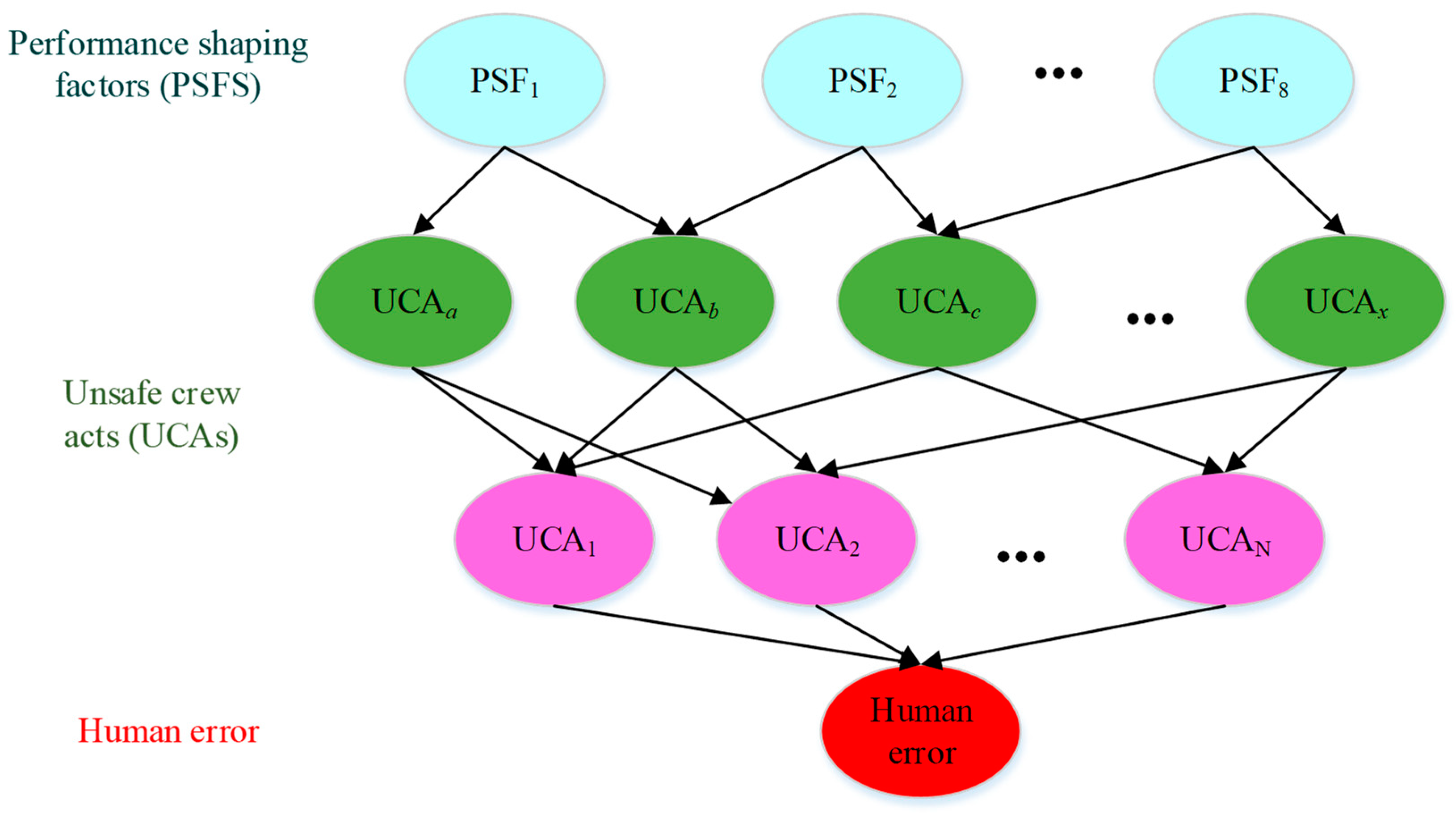
- Performance-shaping factors (PSFs) are used as factors contributing to unsafe crew acts (UCAs).
- The conditional probabilities quantitatively describe the relationships among PSFs, UCAs, and human errors.
- The method offers a point for translating the research model into practical application.
Abstract
1. Introduction
2. Literature Review
3. Materials and Methods
3.1. Bayesian Network
3.2. SPAR-H
3.2.1. Identifying the Type of Task
3.2.2. Determining the Multipliers According to PSF Levels
3.2.3. Calculating HEP
3.3. Method Integration: BN Version of SPAR-H
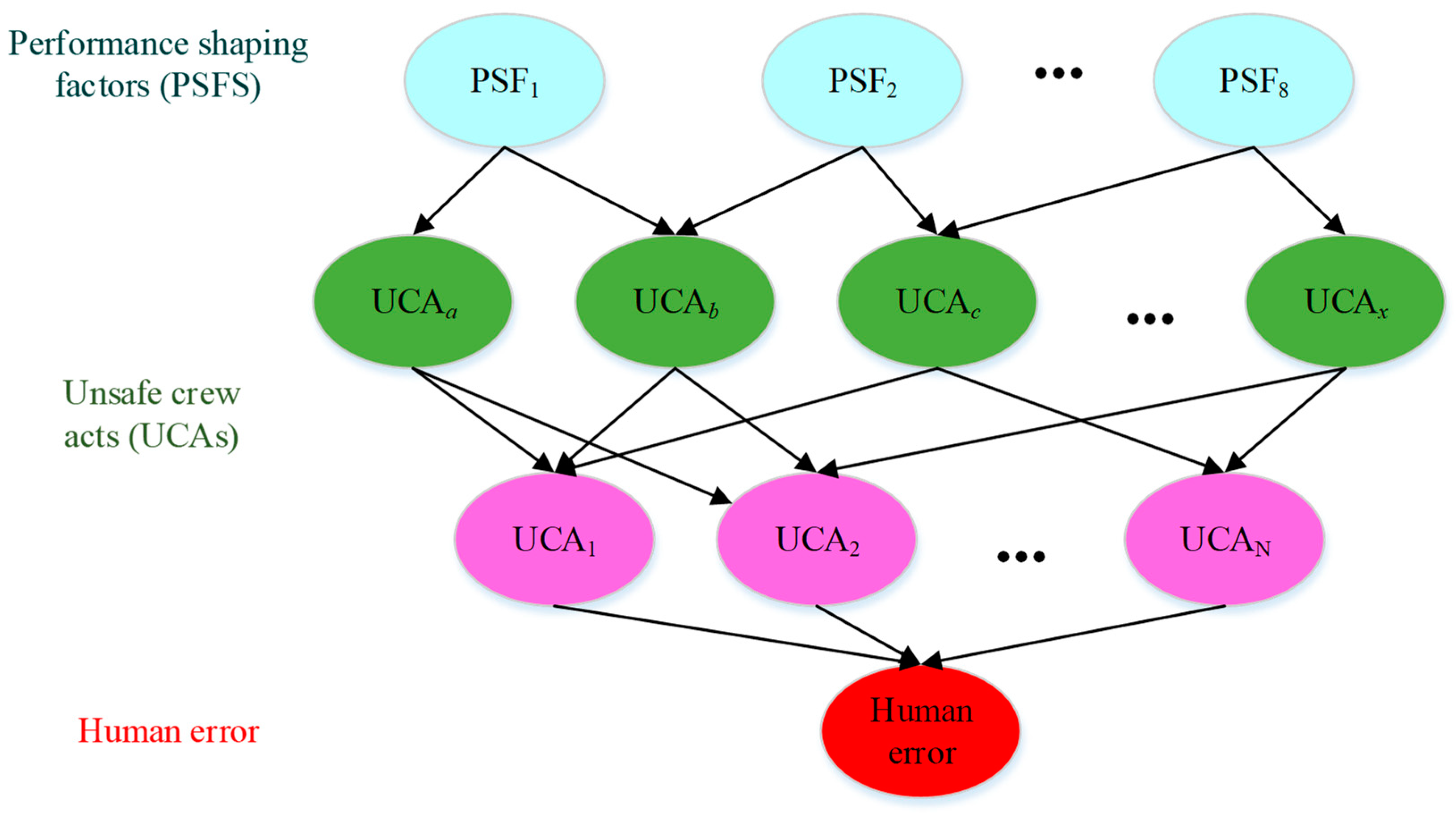
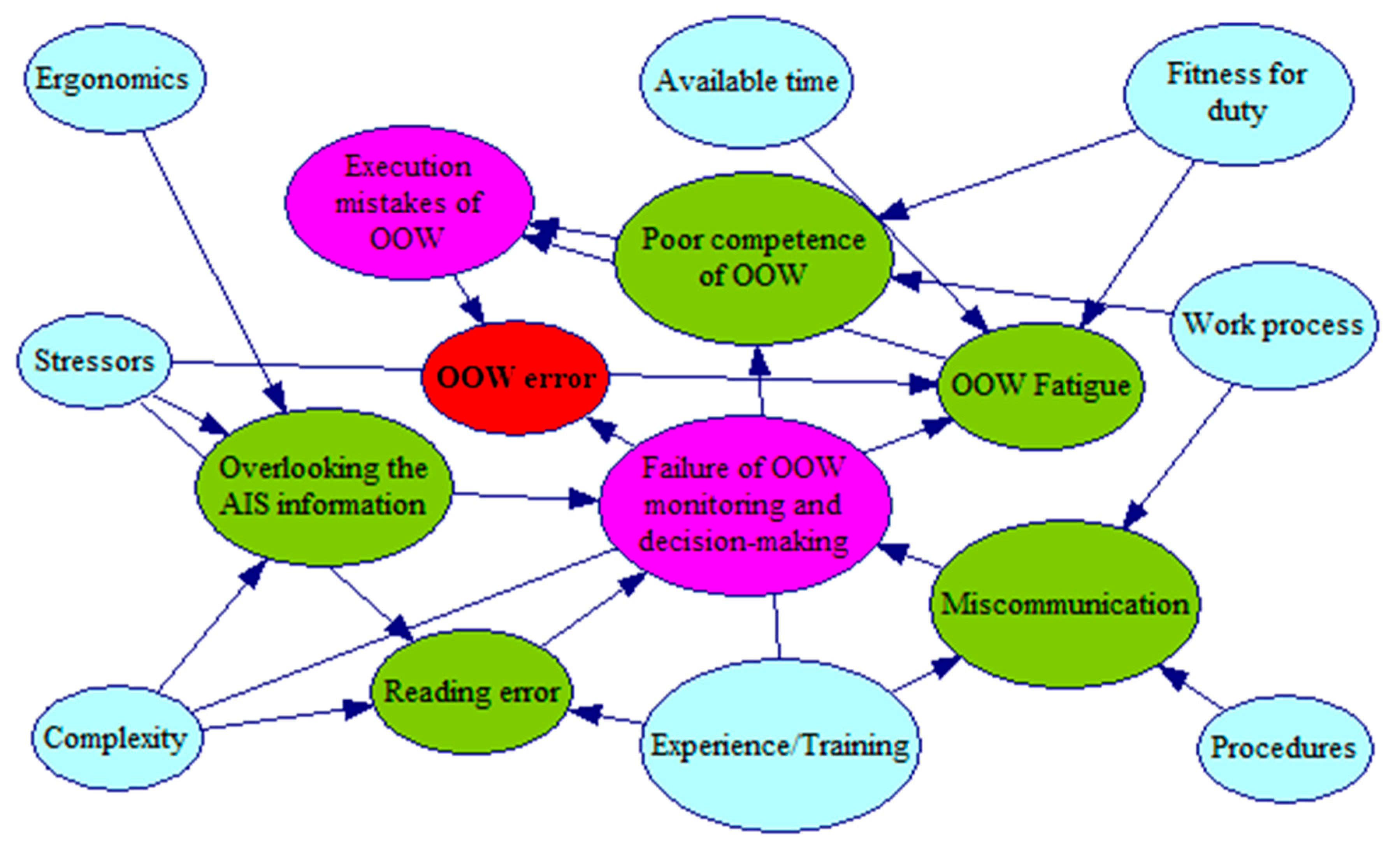
3.3.1. Developing BN for Unsafe Crew Acts
3.3.2. Quantifying the BN Model
4. Case Study
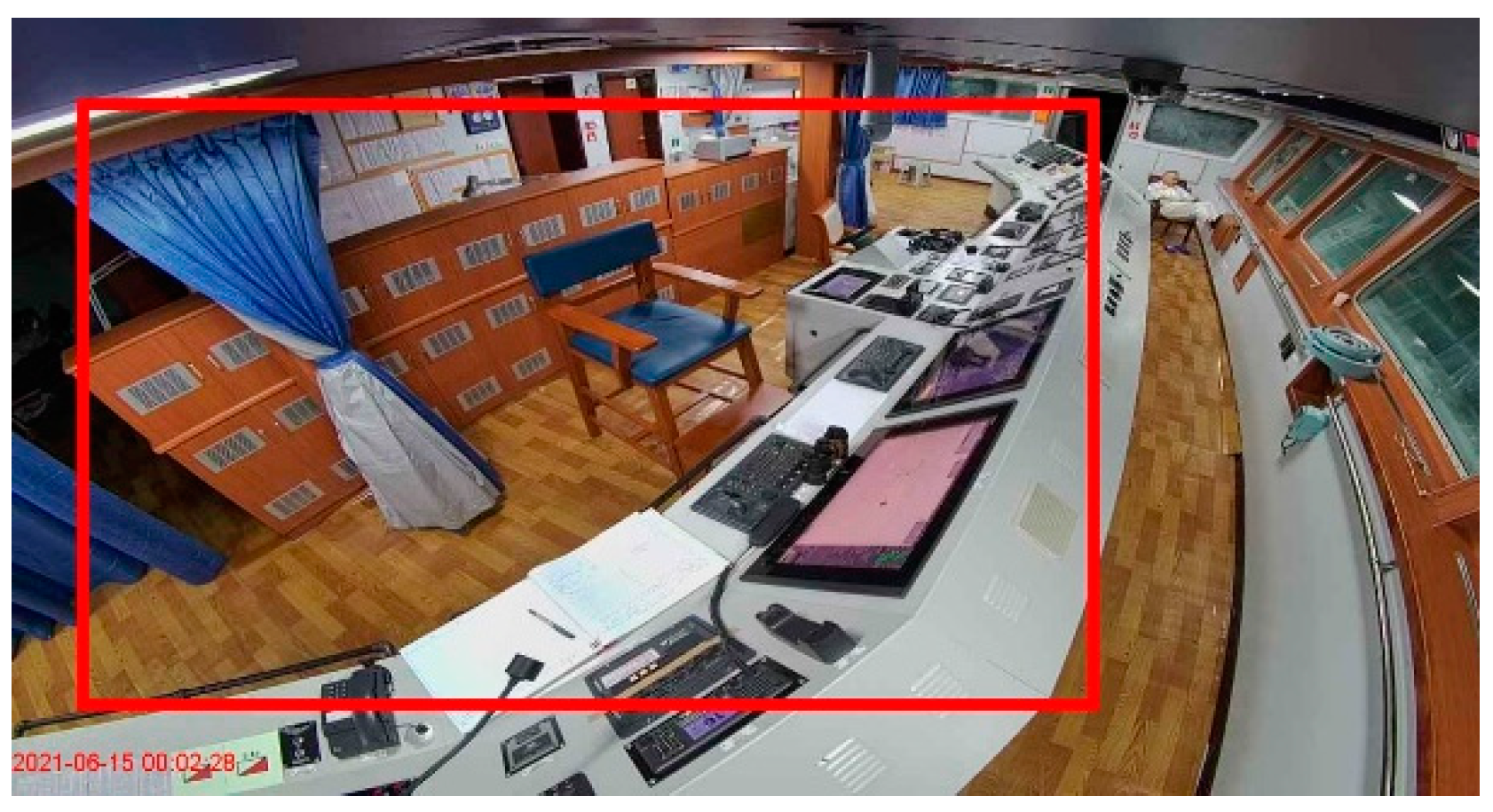
4.1. Case Description
4.2. Qualitative Analysis: Mapping PSFs and UCAs
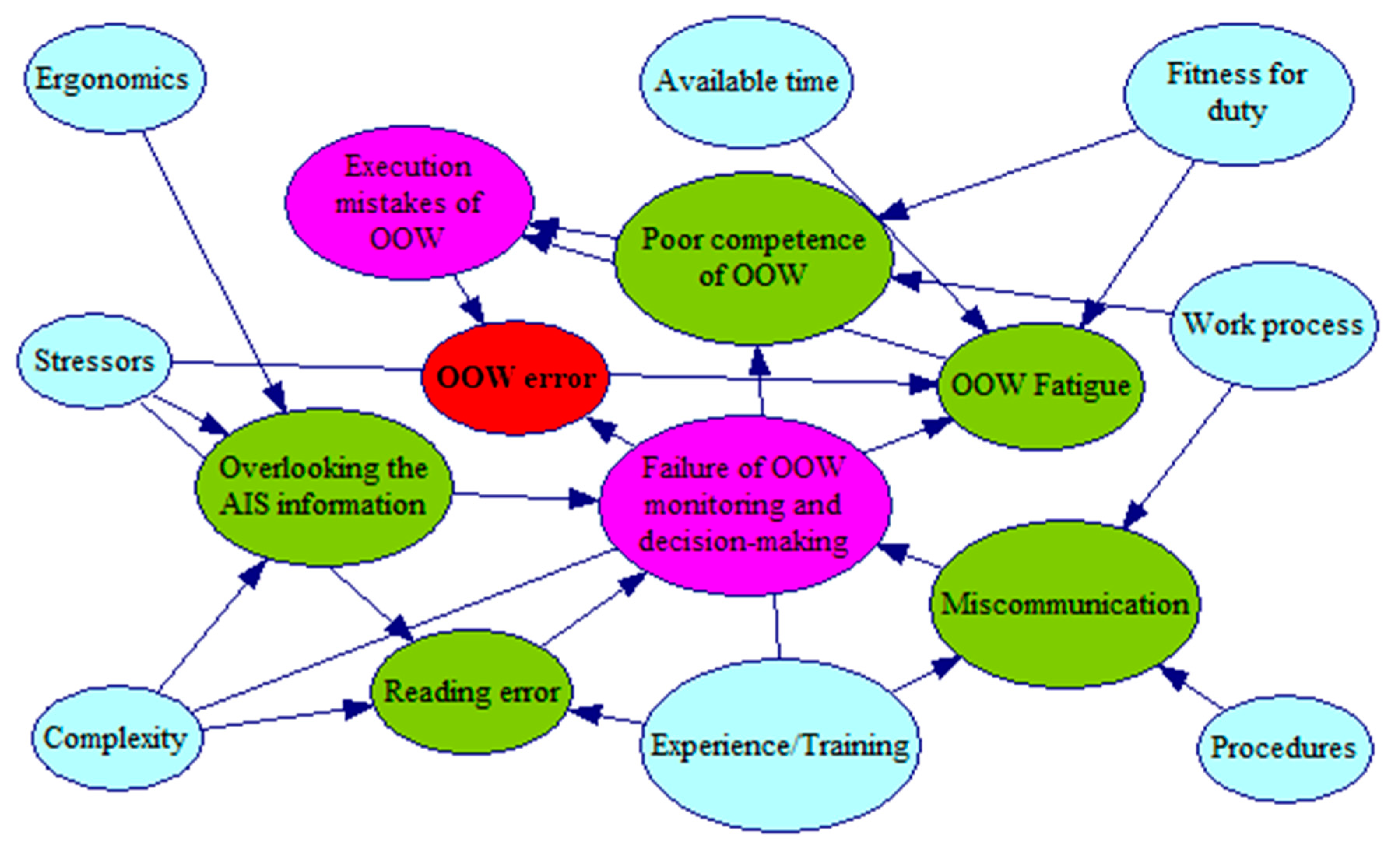
4.2.1. OOW’s Task Analysis
4.2.2. BN Structure
4.3. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Celik, M. Designing of integrated quality and safety management system (IQSMS) for shipping operations. Saf. Sci. 2009, 47, 569–577. [Google Scholar] [CrossRef]
- Valdez, B.O.A.; Goerlandt, F. A STAMP-based approach for designing maritime safety management systems. Saf. Sci. 2018, 109, 109–129. [Google Scholar] [CrossRef]
- Chauvin, C.; Lardjane, S.; Morel, G.; Clostermann, J.P.; Langard, B. Human and organisational factors in maritime accidents: Analysis of collisions at sea using the HFACS. Accid. Anal. Prev. 2013, 59, 26–37. [Google Scholar] [CrossRef] [PubMed]
- Du, L.; Banda, O.A.V.; Goerlandt, F.; Kujala, P.; Zhang, W. Improving near miss detection in maritime traffic in the northern Baltic sea from ais data. J. Mar. Sci. Eng. 2021, 9, 180. [Google Scholar] [CrossRef]
- International Maritime Organization (IMO). Guidelines on the Application of Formal Safety Assessment for Use in the IMO Rule-Making Process; MSC Circ 1023/MEPC Circ 392; International Maritime Organization: London, UK, 2002. [Google Scholar]
- European Maritime Safety Agency. Annual Overview of Marine Casualties and Incidents 2020; Report No.: Ares(2020)7389783-07/12/2020; European Maritime Safety Agency: Lisbon, Portugal, 2020.
- Yang, X.; Zhang, W.; Ramos, M.; Lyu, H.; Zhou, X.; Meng, X.; Wang, Q. A hybrid early-warning system for unsafe crew acts detection and prediction. In Proceedings of the 31st European Safety and Reliability Conference, Angers, France, 19–23 September 2021. [Google Scholar]
- Dos Santos, I.J.L.; França, J.E.; Santos, L.F.M.; Haddad, A.N. Allocation of performance shaping factors in the risk assessment of an offshore installation. J. Loss Prev. Process Ind. 2020, 64, 104085. [Google Scholar] [CrossRef]
- Bevilacqua, M.; Ciarapica, F.E. Human factor risk management in the process industry: A case study. Reliab. Eng. Syst. Saf. 2018, 169, 149–159. [Google Scholar] [CrossRef]
- Puisa, R.; Lin, L.; Bolbot, V.; Vassalos, D. Unravelling causal factors of maritime incidents and accidents. Saf. Sci. 2018, 110, 124–141. [Google Scholar] [CrossRef]
- Chen, S.T.; Wall, A.; Davies, P.; Yang, Z.; Wang, J.; Chou, Y.H. A human and organisational factors (HOFs) analysis method for marine casualties using HFACS-maritime accidents (HFACS-MA). Saf. Sci. 2013, 60, 105–114. [Google Scholar] [CrossRef]
- Uğurlu, Ö.; Umut, Y.; Ersan, B. Analysis of grounding accidents caused by human error. J. Mar. Sci. Technol. 2015, 23, 748–760. [Google Scholar]
- Uğurlu, Ö.; Yildiz, S.; Loughney, S.; Wang, J. Modified human factor analysis and classification system for passenger vessel accidents (HFACS-PV). Ocean Eng. 2018, 161, 47–61. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Goerlandt, F.; Montewka, J. Maritime transportation risk analysis: Review and analysis in light of some foundational issues. Reliab. Eng. Syst. Saf. 2015, 138, 115–134. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Mou, J.; Van Gelder, P.H.A.J.M. Probabilistic risk analysis for ship-ship collision: State-of-the-art. Saf. Sci. 2019, 117, 108–122. [Google Scholar] [CrossRef]
- Bobbio, A.; Portinale, L.; Minichino, M.; Ciancamerla, E. Improving the analysis of dependable systems by mapping fault trees into Bayesian networks. Reliab. Eng. Syst. Saf. 2001, 71, 249–260. [Google Scholar] [CrossRef]
- Hänninen, M.; Valdez Banda, O.A.; Kujala, P. Bayesian network model of maritime safety management. Expert Syst. Appl. 2014, 41, 7837–7846. [Google Scholar] [CrossRef]
- Utne, I.B.; Rokseth, B.; Sørensen, A.J.; Vinnem, J.E. Towards supervisory risk control of autonomous ships. Reliab. Eng. Syst. Saf. 2020, 196, 106757. [Google Scholar] [CrossRef]
- Zhang, G.; Thai, V.V.; Law, A.W.; Yuen, K.F.; Loh, H.S.; Zhou, Q. Quantitative risk assessment of seafarers’ nonfatal injuries due to occupational accidents based on Bayesian network modeling. Risk Anal. 2020, 40, 8–23. [Google Scholar] [CrossRef]
- Sotiralis, P.; Ventikos, N.P.; Hamann, R.; Golyshev, P.; Teixeira, A.P. Incorporation of human factors into ship collision risk models focusing on human centred design aspects. Reliab. Eng. Syst. Saf. 2016, 156, 210–227. [Google Scholar] [CrossRef]
- Griffith, C.D.; Mahadevan, S. Human reliability under sleep deprivation: Derivation of performance shaping factor multipliers from empirical data. Reliab. Eng. Syst. Saf. 2015, 144, 23–34. [Google Scholar] [CrossRef]
- Fan, S.; Blanco-Davis, E.; Yang, Z.; Zhang, J.; Yan, X.P. Incorporation of human factors into maritime accident analysis using a data-driven Bayesian network. Reliab. Eng. Syst. Saf. 2020, 203, 107070. [Google Scholar] [CrossRef]
- Psaraftis, H.N.; Caridis, P.; Desypris, N.; Panagakos, G.; Ventikos, N. The human element as a factor in marine accidents. In Proceedings of the IMLA-10 Conference, St. Malo, France, 14–18 September 1998. [Google Scholar]
- Qiao, W.; Liu, Y.; Ma, X.; Liu, Y. Human factors analysis for maritime accidents based on a dynamic fuzzy Bayesian network. Risk Anal. 2020, 40, 957–980. [Google Scholar] [CrossRef]
- Hallbert, B.; Boring, R.; Gertman, D.; Dudenhoeffer, D.; Whaley, A.; Marble, J. Human Events Repository Analysis (HERA) System Overview; Report No.: NUREG/CR-6903; US Nuclear Regulatory Commission: Washington, DC, USA, 2006.
- Vaez, N.; Nourai, F. Randap: An integrated framework for reliability analysis of detailed action plans of combined automatic-operator emergency response taking into account control room operator errors. J. Loss Prev. Process Ind. 2013, 26, 1366–1379. [Google Scholar] [CrossRef]
- Steijn, W.M.P.; Van Kampen, J.N.; Van der Beek, D.; Groeneweg, J.; Van Gelder, P.H.A.J.M. An integration of human factors into quantitative risk analysis using bayesian belief networks towards developing a ‘QRA+’. Saf. Sci. 2020, 122, 104514. [Google Scholar] [CrossRef]
- Meng, X.; Li, X.; Wang, W.; Song, G.; Chen, G.; Zhu, J. A novel methodology to analyze accident path in deepwater drilling operation considering uncertain information. Reliab. Eng. Syst. Saf. 2021, 205, 107255. [Google Scholar] [CrossRef]
- Goul, K.S.; Ringstad, A.J.; Van de Merwe, K. Human reliability analysis in major accident risk analyses in the norwergian petroleum industry. In Proceedings of the Human Factors and Ergonomics Society, 56th Annual Meeting, Boston, MA, USA, 22–26 October 2012. [Google Scholar]
- Paltrinieri, N.; Khan, F. Dynamic Risk Analysis in the Chemical and Petroleum Industry: Evolution and Interaction with Parallel Disciplines in the Perspective of Industrial Application; Elsevier: Oxford, UK, 2016. [Google Scholar]
- Pan, Y.; Ou, S.; Zhang, L.; Zhang, W.; Wu, X.; Li, H. Modeling risks in dependent systems: A Copula-Bayesian approach. Reliab. Eng. Syst. Saf. 2019, 188, 416–431. [Google Scholar] [CrossRef]
- Meng, X.; Chen, G.; Zhu, G.; Zhu, Y. Dynamic quantitative risk assessment of accidents induced by leakage on offshore platforms using DEMATEL-BN. Int. J. Nav. Archit. Ocean. Eng. 2019, 11, 22–32. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, S.; Zheng, W.; Fan, J. A dynamic and quantitative risk assessment method with uncertainties for offshore managed pressure drilling phases. Saf. Sci. 2018, 104, 39–54. [Google Scholar] [CrossRef]
- Khakzad, N.; Amyotte, P.; Cozzani, V.; Reniers, G.; Pasman, H. How to address model uncertainty in the escalation of domino effects. J. Loss Prev. Process Ind. 2018, 54, 49–56. [Google Scholar] [CrossRef]
- Akhtar, M.J.; Utne, I.B. Human fatigue’s effect on the risk of maritime groundings—A Bayesian Network modeling approach. Saf. Sci. 2014, 62, 427–440. [Google Scholar] [CrossRef]
- Gertman, D.; Blackman, H.; Marble, J.; Byers, J.; Smith, C. The SPAR-H Human Reliability Analysis Method; Report No.: NUREG/CR-6883; US Nuclear Regulatory Commission: Washington, DC, USA, 2005.
- Groth, K.M.; Swiler, L.P. Bridging the gap between HRA research and HRA practice: A Bayesian network version of SPAR-H. Reliab. Eng. Syst. Saf. 2013, 115, 33–42. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, L.; Qing, T.; Liu, X. Use of Bayesian networks and improved SPAR-H for quantitative analysis of human reliability during severe accidents mitigation process in nuclear power plant. J. Nucl. Sci. Technol. 2021, 58, 1099–1112. [Google Scholar] [CrossRef]
- Yu, J.Y.; Wu, S.; Yu, Y.; Chen, H.; Fan, H.; Liu, J.; Ge, S. Process system failure evaluation method based on a Noisy-OR gate intuitionistic fuzzy Bayesian network in an uncertain environment. Process Saf. Environ. Prot. 2021, 150, 281–297. [Google Scholar]
- Graziano, A.; Teixeira, A.P.; Guedes, S.C. Classification of human errors in grounding and collision accidents using the TRACEr taxonomy. Saf. Sci. 2016, 86, 245–257. [Google Scholar] [CrossRef]
- Akyuz, E.; Celik, M.; Akgun, I.; Cicek, K. Prediction of human error probabilities in a critical marine engineering operation on-board chemical tanker ship: The case of ship bunkering. Saf. Sci. 2018, 110, 102–109. [Google Scholar] [CrossRef]
- Zhou, Q.; Wong, Y.D.; Loh, H.S.; Yuen, K.F. A fuzzy and Bayesian network CREAM model for human reliability analysis—The case of tanker shipping. Saf. Sci. 2018, 105, 149–157. [Google Scholar] [CrossRef]
- Erden, P.; Akyuz, E. An interval type-2 fuzzy SLIM approach to predict human error in maritime transportation. Ocean Eng. 2021, 232, 109161. [Google Scholar] [CrossRef]
- Hallbert, B.; Kolaczkowski, A. The Employment of Empirical Data and Bayesian Methods in Human Reliability Analysis: A Feasibility Study; Report No.: NUREG/CR-6949; US Nuclear Regulatory Commission: Washington, DC, USA, 2007.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | PSF | PSF Level | Multiplier |
|---|---|---|---|
| 1 | Available time | Expansive time | 0.1 |
| Normal time | 1 | ||
| Barely adequate time | 10 | ||
| 2 | Stressors | Normal | 1 |
| High | 2 | ||
| Extreme | 5 | ||
| 3 | Complexity | Normal | 1 |
| Moderately complex | 2 | ||
| Highly complex | 5 | ||
| 4 | Experience/training | Good | 0.5 |
| Normal | 1 | ||
| Poor | 5 | ||
| 5 | Procedures | Normal | 1 |
| Available, but poor | 5 | ||
| Incomplete | 20 | ||
| Not available | 50 | ||
| 6 | Ergonomics | Good | 0.5 |
| Normal | 1 | ||
| Poor | 10 | ||
| Missing/misleading | 50 | ||
| 7 | Fitness for duty | Normal | 1 |
| Degraded fitness | 5 | ||
| Unfit | 20 | ||
| 8 | Work processes | Good | 0.5 |
| Normal | 1 | ||
| Poor | 5 |
| PSF | Description of UCA |
|---|---|
| Available time | This PSF involves whether the time is adequate to execute a task and whether the task execution satisfies the requirement of the process dynamics on board. In a collision case, inadequate time includes an event where a crew member of one ship is oblivious to the coming of another ship or discovers it too late. |
| Ergonomics | This PSF refers to features of the human–machine environment, including poor bridge design, the unreasonable layout of bridge instrumentation, or failure of instruments. |
| Stressors | This PSF accounts for mental conditions adversely influencing the performances of OOWs. Overwork, mental fatigue, insufficient incentive, and unreasonable working arrangement will lead to stressors. |
| Experience/Training | This PSF is related to crew members’ training time, quality and effect of training, education level, working seniority, etc. |
| Procedures | In the shipping industry, this PSF involves: (a) a safety policy that ensures the safe operation of ships; (b) the communication mechanism among shore and shipboard crews; (c) procedures for reporting incidents, near misses, and accidents; and (d) preparing for and responding to emergencies. |
| Work processes | This PSF refers to formal processes (operational tempo, time pressures, production quotas, incentive systems, schedules, etc.) |
| Complexity | Highly complex tasks refer to the situations in which crew members have no knowledge, aptitude, skill, or time to deal with them. |
| Fitness for duty | Unfitness for duty may occur when OOWs fail to prepare physically or mentally: violations of rest requirements (fatigue) or the use of drugs or alcohol. |
| Experience/Training | Good | |||||||||
| Fitness for Duty | Normal | Degraded fitness | Unfit | |||||||
| Work Processes | Good | Normal | Poor | Good | Normal | Poor | Good | Normal | Poor | |
| Poor Competence of OOW | Yes | 0.000125 | 0.00025 | 0.00125 | 0.000625 | 0.00125 | 0.00625 | 0.0025 | 0.005 | 0.025 |
| No | 0.999875 | 0.99975 | 0.99875 | 0.999375 | 0.99875 | 0.99375 | 0.9975 | 0.995 | 0.975 | |
| Experience/Training | Normal | |||||||||
| Fitness for Duty | Normal | Degraded fitness | Unfit | |||||||
| Work Process | Good | Normal | Poor | Good | Normal | Poor | Good | Normal | Poor | |
| Poor Competence of OOW | Yes | 0.00025 | 0.0005 | 0.0025 | 0.00125 | 0.0025 | 0.0125 | 0.005 | 0.01 | 0.05 |
| No | 0.99975 | 0.9995 | 0.9975 | 0.99875 | 0.9975 | 0.9875 | 0.995 | 0.99 | 0.95 | |
| Experience/Training | Poor | |||||||||
| Fitness for Duty | Normal | Degraded fitness | Unfit | |||||||
| Work Processes | Good | Normal | Poor | Good | Normal | Poor | Good | Normal | Poor | |
| Poor Competence of OOW | Yes | 0.00125 | 0.025 | 0.0125 | 0.00625 | 0.0125 | 0.0625 | 0.025 | 0.05 | 0.2016 |
| No | 0.99875 | 0.975 | 0.9875 | 0.99375 | 0.9875 | 0.9375 | 0.975 | 0.95 | 0.7984 | |
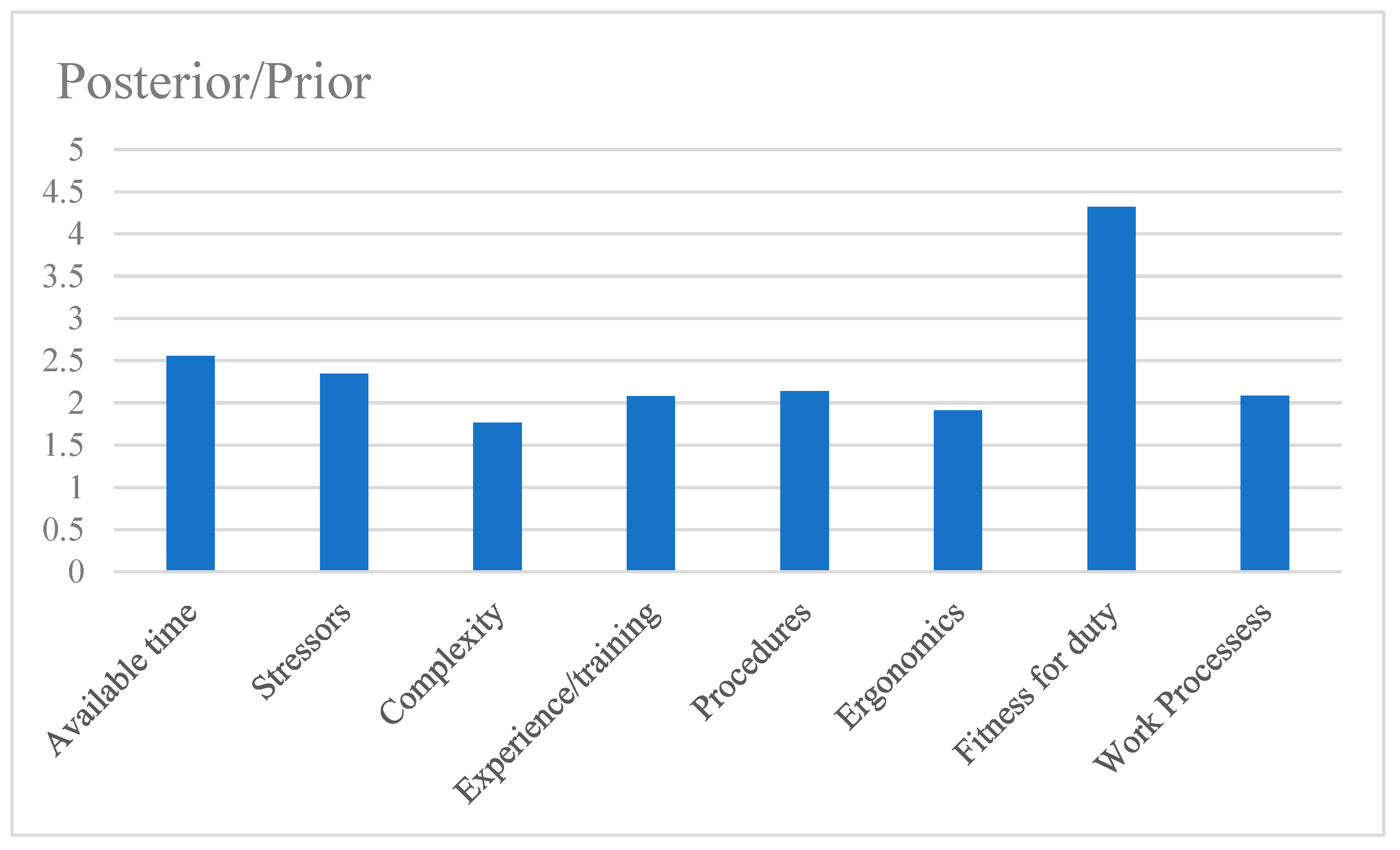
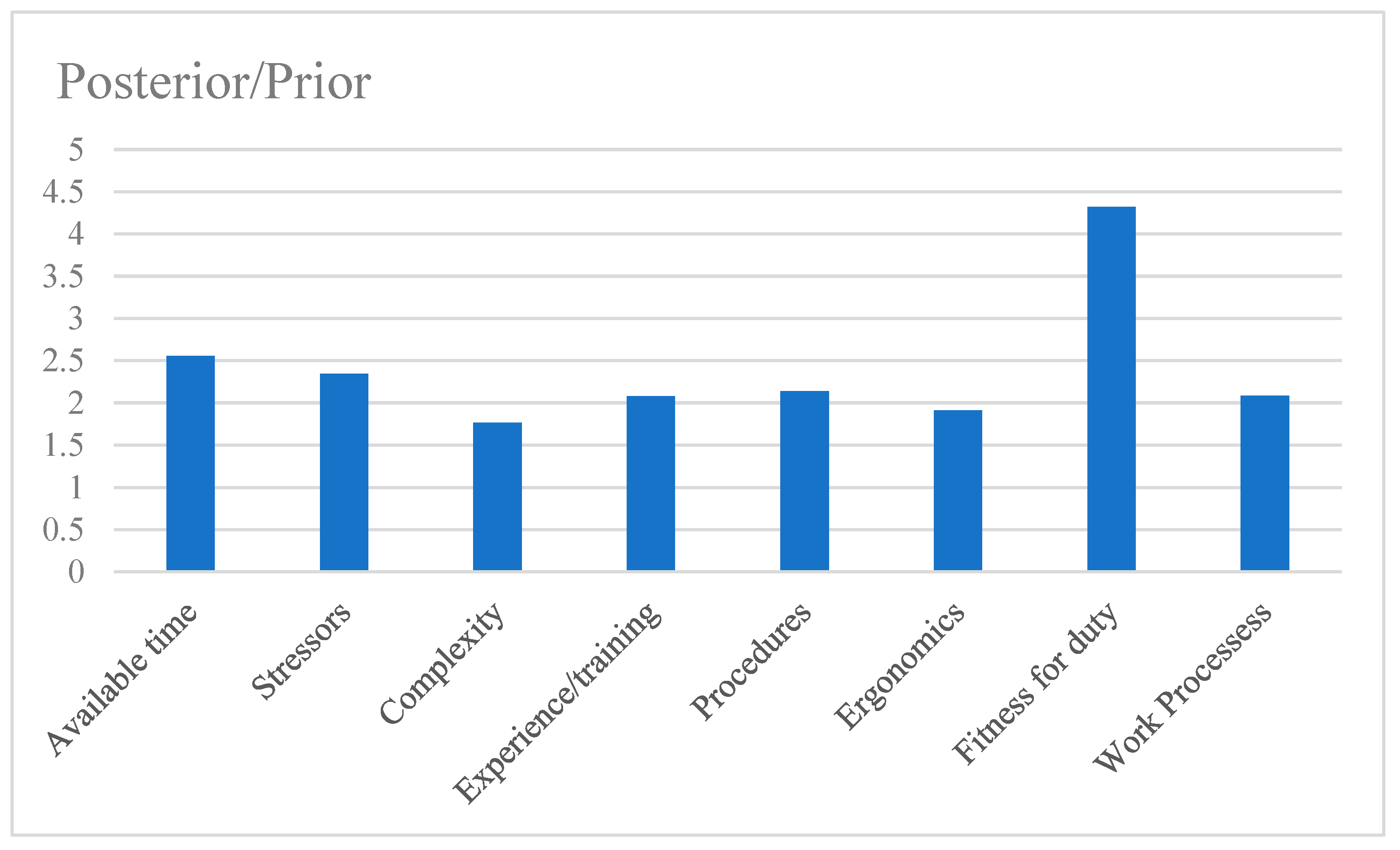
| Node | Node State | Prior Probability | Posterior Probability | Posterior/Prior |
|---|---|---|---|---|
| Available time | Expansive time | 0.159 | 0.085 | 0.535 |
| Normal time | 0.683 | 0.511 | 0.748 | |
| Barely adequate time | 0.158 | 0.404 | 2.557 | |
| Stressors | Normal | 0.841 | 0.772 | 0.918 |
| High | 0.136 | 0.174 | 1.279 | |
| Extreme | 0.023 | 0.054 | 2.348 | |
| Complexity | Normal | 0.500 | 0.367 | 0.734 |
| Moderately complex | 0.341 | 0.351 | 1.029 | |
| Highly complex | 0.159 | 0.281 | 1.767 | |
| Experience/training | Good | 0.103 | 0.069 | 0.670 |
| Normal | 0.714 | 0.550 | 0.770 | |
| Poor | 0.183 | 0.381 | 2.082 | |
| Procedures | Normal | 0.450 | 0.355 | 0.789 |
| Available, but poor | 0.300 | 0.273 | 0.91 | |
| Incomplete | 0.200 | 0.265 | 1.325 | |
| Not available | 0.050 | 0.107 | 2.140 | |
| Ergonomics | Good | 0.158 | 0.149 | 0.943 |
| Normal | 0.683 | 0.652 | 0.955 | |
| Poor | 0.136 | 0.154 | 1.132 | |
| Missing/misleading | 0.023 | 0.044 | 1.913 | |
| Fitness for duty | Normal | 0.841 | 0.608 | 0.723 |
| Degraded fitness | 0.109 | 0.175 | 1.606 | |
| Unfit | 0.050 | 0.216 | 4.320 | |
| Work processes | Good | 0.158 | 0.119 | 0.753 |
| Normal | 0.819 | 0.833 | 1.017 | |
| Poor | 0.023 | 0.048 | 2.087 | |
| Overlooking the AIS information | Yes | 0.002 | 0.068 | 34.00 |
| No | 0.998 | 0.932 | 0.934 | |
| Reading error | Yes | 0.001 | 0.035 | 35.00 |
| No | 0.999 | 0.965 | 0.966 | |
| Miscommunication | Yes | 0.007 | 0.248 | 35.43 |
| No | 0.993 | 0.752 | 0.757 | |
| OOW fatigue | Yes | 0.008 | 0.498 | 62.25 |
| No | 0.992 | 0.502 | 0.506 | |
| Poor competence | Yes | 0.005 | 0.167 | 33.40 |
| No | 0.995 | 0.833 | 0.837 | |
| Failure of OOW monitoring and decision-making | Yes | 0.010 | 0.350 | 35.00 |
| No | 0.990 | 0.650 | 0.657 | |
| Execution mistakes of OOW | Yes | 0.013 | 0.660 | 50.77 |
| No | 0.987 | 0.340 | 0.344 | |
| OOW error | Yes | 0.029 | 1 | 34.48 |
| No | 0.971 | 0 | -- |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Meng, X.; Yang, X.; Lyu, H.; Zhou, X.-Y.; Wang, Q. A Practical Risk-Based Model for Early Warning of Seafarer Errors Using Integrated Bayesian Network and SPAR-H. Int. J. Environ. Res. Public Health 2022, 19, 10271. https://doi.org/10.3390/ijerph191610271
Zhang W, Meng X, Yang X, Lyu H, Zhou X-Y, Wang Q. A Practical Risk-Based Model for Early Warning of Seafarer Errors Using Integrated Bayesian Network and SPAR-H. International Journal of Environmental Research and Public Health. 2022; 19(16):10271. https://doi.org/10.3390/ijerph191610271
Chicago/Turabian StyleZhang, Wenjun, Xiangkun Meng, Xue Yang, Hongguang Lyu, Xiang-Yu Zhou, and Qingwu Wang. 2022. "A Practical Risk-Based Model for Early Warning of Seafarer Errors Using Integrated Bayesian Network and SPAR-H" International Journal of Environmental Research and Public Health 19, no. 16: 10271. https://doi.org/10.3390/ijerph191610271
APA StyleZhang, W., Meng, X., Yang, X., Lyu, H., Zhou, X.-Y., & Wang, Q. (2022). A Practical Risk-Based Model for Early Warning of Seafarer Errors Using Integrated Bayesian Network and SPAR-H. International Journal of Environmental Research and Public Health, 19(16), 10271. https://doi.org/10.3390/ijerph191610271