Abstract
The advent of remote control and autonomous technologies is fundamentally transforming ship manning models, necessitating adaptations in seafarer standards for L2-class autonomous vessels. To address these challenges, the International Maritime Organization’s (IMO) Maritime Safety Committee (MSC) is developing a non-mandatory Code for Maritime Autonomous Surface Ships (MASS). This paper first conducts an in-depth analysis of the immutable legal obligations and variable technical standards governing seafarer manning for L2 autonomous ships, drawing on the China Classification Society’s (CCS) Rules for Intelligent Ships. It then scrutinizes the international legal barriers confronting CCS manning requirements, particularly concerning remote operator qualifications. The study focuses on aligning China’s regulatory framework with emerging IMO standards and proposes four targeted reforms to facilitate this alignment for L2 vessels: broadening the “seafarer” definition, updating minimum manning principles and procedures, modernizing competency standards, and establishing inclusive operational testing systems.
1. Introduction
The intelligent evolution of international shipping is an imperative, heralding a transformation as profound as the advent of containerization. This rapid development of autonomous ships (IMO 2025a), as illustrated in Figure 1, presents both opportunities and challenges. The gradual application of remote control and autonomous technologies for ships marks a significant departure from traditional, seafarer-centric navigation. This technological shift presents a substantial challenge, as current technical norms and legal systems struggle to adapt. Consequently, the legal framework for autonomous ships remains underdeveloped, a problem exacerbated by diverging regulatory approaches between regional and international regimes.
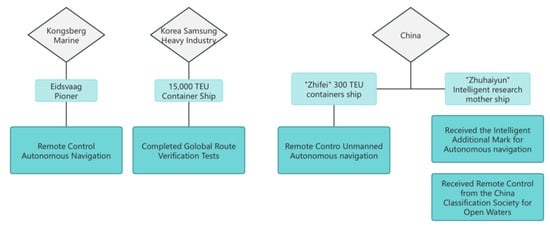
Figure 1.
Smart Shipping Technology.1
The International Maritime Organization (IMO) defines a Maritime Autonomous Surface Ship (MASS) as a ship that, to a varying degree, can operate independent of human interaction (IMO 2025a). The IMO divides the autonomy level of MASS into L1-class to L4-class. Considering that the IMO, as a competent international organization, will shape the future development and legal framework for autonomous ships, the classification standards proposed by the IMO are international, so this article adopts this standard.
At present, there is relatively little research on the problem of seafarers manning requirements for the L2-class MASS. Stępień (2023) contends that the main regulatory obstacle for MASS at present arises from crewing requirements rather than operational autonomy per se. Recent scholarship on MASS regulatory aspects, such as Nawrot and Pepłowska-Dąbrowska (2019) and Ringbom (2019), explores adaptive legal frameworks for autonomous shipping, emphasizing risk-based approaches under IMO guidelines. This body of work informs our analysis of variable standards in maritime law. While traditional interpretations of conventions like the United Nations Convention on the Law of the Sea (UNCLOS, Article 94(4))2, the International Convention on Standards of Training, Certification, and Watchkeeping for Seafarers (STCW)3, and the Maritime Labour Convention (MLC)4 emphasize the physical presence of the master and crew on board, legal scholars argue that these provisions may be adaptable to unmanned ships through dynamic treaty interpretation or amendments. For instance, UNCLOS Article 94(4)(b) implies the necessity of a qualified master, but its application to remote-controlled L2 autonomous ships is currently being refined through the IMO’s non-mandatory MASS Code. As documented in MSC 110/5/14 (IMO 2025c), the draft Code explicitly permits the master’s oversight from shore-based remote operation centers (ROCs) under functional equivalence principles, resolving the “presence” ambiguity by technological accommodation (IMO 2025a). This legislative evolution demonstrates how immutable obligations can adapt to emerging technologies without legal contradiction, as evidenced by MSC 110/5/1′s (IMO 2025b) acceptance of multi-vessel command protocols. Lok Kan So et al. and Shanice N. Trowers believe that since management and decision-making are still carried out by people on board, traditional seaworthiness theories can still be applied to the L2-class MASS (Kan So and Sooksripaisarnkit 2021; Trees 2023). The research mainly focuses on two aspects. The first is the cost impact brought about by changes in seafarers of MASS, such as C Kooij et al.’s belief that the current reduction in seafarers members can bring significant economic benefits to small commercial ships (Kooij et al. 2023). The second is that seafarers under MASS need to possess new technical abilities. For example, Sohyun Jo et al. believe that the introduction of MASS requires seafarer members to have new technical abilities in addition to mastering traditional navigation skills (Jo et al. 2020). Toni Mestrovic et al. contend that maritime education curricula must be thoughtfully revised to address the specific competencies required for various types of ships and traffic areas (Meštrović et al. 2024). Rana Saha explored the detailed ability requirements and manning deployment plan for shore-based operators (Saha 2021).The above research provides a certain research foundation for the current state of regulation related to MASS, but further refinement is still needed in the specific development stages and selection of specific problems brought about by MASS. The most significant change in different levels of autonomy lies in the positions and numbers of personnel operating ships. The application of remote-control technology brings new positions such as remote operations center (ROC) personnel, which will become an important part of MASS operation. The application of autonomous operation technology has led to a gradual decrease in the number of seafarer members on board and a development towards unmanned ships. The operational framework of MASS is characterized by the coexistence of multiple autonomy levels (L1 to L4), each designed for specific scenarios rather than a linear progression. This multi-level structure ensures flexibility, allowing MASS to adapt to diverse operational needs while maintaining safety (Wang et al. 2019). Furthermore, the introduction of the EU Artificial Intelligence Act (AI Act) 5 may impact different levels of MASS, and regulating and balancing the application of AI in MASS may be closely related to the regulation of the obligations of MASS crew members. The EU AI Act, which classifies autonomous systems as “high-risk” under Article 6(1)(a), imposes technical documentation obligations (e.g., algorithmic transparency in Annex IV) relevant to L2 ships’ remote operations. At present, the decision-making scheme and system for fully MASS navigation are not sufficiently advanced to conclude that MASS vessels are at least as safe as traditional vessels. Therefore, it is premature to directly address L3- and L4-class unmanned ships. L1-class ships focus on auxiliary functions and have little impact on seafarers’ suitability requirements. As an intermediate step between traditional ships and unmanned ships, L2-class MASS ships have lower technical requirements for ship equipment, systems, functions, procedures, and other aspects compared to unmanned ships. At the same time, there are still seafarer members onboard, which were put into operation and commercialization earlier than unmanned ships. These vessels also provide a foundation for the development of fully unmanned ships, highlighting the need to address the challenges specific to L2-class MASS.
Specifically, this study examines the legal tensions between fixed maritime obligations (e.g., SOLAS manning requirements) and evolving technical standards for L2 autonomous ships, with emphasis on ensuring that the China Classification Society’s (CCS) regulations align with emerging IMO frameworks. As discussed at IMO MSC 110 (June 2025), the non-mandatory MASS Code—slated for formal adoption in 2026—aims to resolve critical gaps in autonomous shipping governance, including redefining “seafarer” status for ROC personnel and determining master presence requirements. Current CCS Rules for Intelligent Ships mandate crew positions incompatible with L2 operations where human oversight occurs remotely. IMO MSC 110 deliberations confirmed persistent ambiguities in applying STCW Convention Article 3 to ROC personnel, creating legal conflicts when these personnel do not physically board vessels. This misalignment risks rendering China’s standards internationally non-compliant post-2026 MASC Code implementation.
Moreover, while this study focuses on maritime law, insights from aviation legislation reveal critical regulatory gaps. For instance, ICAO’s Annex 6 establishes mandatory command-based controls for autonomous systems (e.g., ATC’s authority over remote pilots), whereas IMO’s goal-oriented framework for L2 MASS lacks equivalent enforcement mechanisms. This divergence underscores the urgency of redefining accountability structures for ROC personnel (Heffner and Rødseth 2019).
By benchmarking CCS regulations against MSC 110′s MASS Code working documents, this research provides a template for national jurisdictions navigating maritime autonomy’s legal complexities while maintaining global interoperability.
2. Methods and Terminologies
2.1. Methods
This article focuses on the potential changes in the manning requirements of L2-class MASS and analyzes the constants and variations under L2-class MASS through the analysis of the concept of ship seaworthiness. Based on the analysis of these changes, three practical challenges arise in the legal application: redefining the scope of seafarers, adapting to the evolving manning models, and meeting the competency requirements of seafarers specific to L2-class MASS. It also provides various regulations to solve these challenges, including expanding the interpretation of “seafarers,” timely improving the principles, procedures, and standards of Minimum Safety Manning Code (MSSMC), advancing the development of seafarer competency standards to align with contemporary demands, and promoting the development of seafarers’ responsibility through an inclusive and open navigation test permit system. This article clarifies the theoretical requirements of the ship manning obligation, offering a foundation for future legislative amendments and improvements. At the practical level, it identifies the obstacles that impede the application of seafarers’ obligations in traditional ships and MASS, with the aim of supporting the advancement of MASS development.
2.2. Terminologies: Manning and Operating Modes
L2-class MASS are characterized by remote control with crew onboard during critical phases, falling under Level 2 of the IMO’s autonomy classification where human oversight coexists with automated systems (Vakil 2022). The current MASS CODE at the IMO does not specify specific standards for MASS, making it difficult to obtain detailed information about MASS. As one of the most advanced countries in the development of MASS, China already has clear regulations on the standards for MASS. This paper will use the definitions in the Rules for Intelligent Ships (China Classification Society 2024) by CCS as the basis for discussion. The “Rules for Intelligent Ships,” notably the CCS Intelligent Ship Rules (China Classification Society 2024), provide a modular framework categorizing smart functions (e.g., intelligent navigation, remote control) into eight categories. These rules aim to ensure safety and efficiency but face challenges in global applicability, as they contrast with fragmented international standards like those from DNV or Lloyd’s Register. This highlights the need for harmonized regulations for L2 autonomous ships (Hao et al. 2024).
According to Article 8.1.2 of the Rules for Intelligent Ships (China Classification Society 2024), “Remote control of a ship refers to a ship that can be controlled by a remote control station or control position outside of the ship to achieve operation.” Given the requirement of a relatively stable environment and the possibility of implementation for remote operation, it is more realistic to operate at a remote control station. Remote control technology is supported by communication transmission technology, environmental perception technology, positioning and navigation technology, auxiliary control technology, and beyond line of sight control technology (Wang and Yu 2020). The work content that could only be achieved on ships is entrusted to shore-based operators for remote control, introducing a new concept of shore seafarers and forming a new personnel manning mode of ship-shore coexistence.
According to Article 9.1.2 of the Rules for Intelligent Ships (China Classification Society 2024), “Autonomous operation of a vessel refers to a vessel that can achieve complete autonomous operation in open waters or throughout the entire voyage.” By combining intelligent devices with modern communication and information, computer networks, intelligent control, artificial intelligence, and other technologies, seafarer members can make decisions and operations without the need for intervention. Autonomous operation technology is different from automation. Automation refers to accurately completing tasks within the preset boundary conditions of the system, while autonomous operation technology emphasizes providing a complete set of decision-making and action plans outside the preset boundary conditions of the system, selecting the best solution and taking action based on it. The control of L2-class MASS shifts between onboard seafarers, ROC personnel, and autonomous systems based on changing conditions during the voyage. Consequently, effective coordination among ROC personnel, the ship, and onboard seafarers is crucial.
3. Discussions
The shipping industry is highly practical, and there is also a close relationship between the level of independent ship technology and legal regulations. The new technologies on MASS bring new personnel allocation models. Based on this, we examine the requirement of seafarer suitability and analyze its connotation in depth. At the essential level, L2-class MASS should align with consistent values and institutional objectives. On a practical level, its unique manning mode presents a challenge to the formal standards.
3.1. Immutability in Connotation
“Seaworthiness” includes not only the physical condition of the vessel but other factors as well (Kassem 2006). The ship manning obligation is also included. Therefore, the connotation of seaworthiness also belongs to the ship manning obligation, and the meaning of it under the L2-class MASS remains the same in the core value and institutional objectives.
3.1.1. The Core Value
Safety redundancy remains fundamental to maritime operations. However, current manning rules fail to address the operational complexity arising from redundant system designs, paradoxically increasing vulnerability due to unregulated interaction failures (Eriksen and Lützen 2022). Until today, seaworthiness is not only closely related to the carrier’s responsibility but also includes a concern for the public interest at sea. In Mobil Shipping & Transportation Co. (New York, NY, USA) v. Wonsild Liquid Carriers Ltd. (Copenhagen, Denmark), regarding the Alsterstern carrying lubricating oil with two substantial areas of damage on its outer hull, the Alsterstern was deemed unseaworthy by the court based on the fact that transporting goods would pose a threat to the environment.6 L2-class MASS will not immediately replace all traditional ships but will instead coexist in the same ocean as traditional ships for maritime cargo transportation activities. The premise for their operation and commercialization is to achieve at least the same level of safety and environmental protection as traditional ships. The MASS Code clearly states the following: “Ensure safe, secure, and environmentally sound MASS operations.” (IMO 2024a) Therefore, the value orientation of maintaining navigation safety and protecting the marine environment still applies to L2-class MASS.
3.1.2. The Institutional Objectives
To this day, “properly equipped seafarers” has become one of the legal elements to prove the seaworthiness of ships. Under traditional ships, seafarer members are born together with the ship, responsible for the navigation and management, safety, and order of the ship. The ability of seafarer members represents the navigation ability of the ship, and they are closely related to each other. Therefore, it is necessary to develop appropriate crew responsibility standards around human factors.
Human factors are among the key factors causing maritime accidents, namely risk factors caused by unsafe human behavior or negligence. Faced with the harsh working environment on board, sailors are exposed to time zone crossings, noise, heat and cold, vibration, and ship movement, making it difficult for them to rest regularly. The factors affected by these environments may lead to a decrease in their work performance; in addition, they also need to maintain good performance and achieve satisfactory levels in multiple tasks. The US Coast Guard proposed in 1993 that human error causes 80% of maritime accidents (Fan et al. 2020). It is widely believed in the industry that unsafe human behavior accounts for 75–96% of the causes of maritime accidents (Fan et al. 2018).
The autonomous mode of MASS has great potential in improving the safety of ship navigation, effectively reducing the probability of human errors among seafarer members, thereby replacing seafarer members and reducing human factors. However, the above conclusions on the causes of accidents only focus on some of the risks associated with traditional ships, while MASS need to address not only traditional risks but also new navigation risks brought about by autonomous operation technology. For L2-class MASS, the main risks they face include interaction with required vessels and object detection, interaction with the physical environment, system failure, cyber-attacks, and equipment failure (Šikić et al. 2023). Therefore, the autonomous operation mode requires a long development cycle and often cannot fully play its role during the application process, still requiring the supervision and intervention of seafarer members. At the same time, the remote mode extends human factors to both sides, and the operations and decisions of shore-based operators fully reflect human factors. According to the results of the IMO MASS regulatory scoping exercise, an important part is to determine the following: 1. Clearly understand the tasks of seafarers on board ships in accordance with current maritime organization documents. 2. Based on the level of autonomy of MASS, clarify whether seafarers are on board and clarify the responsibilities of classified seafarers or personnel for their onboard tasks. 3. Develop new standards for defining seafarers and clearly define the roles and responsibilities of staff, ROC personnel, and captains. From this, it can be seen that human factors are still important for the successful design and operation of MASS (Chae et al. 2020).
In summary, the development of technology has not affected the status of human factors, and seafarer members still play a crucial role in maritime transportation activities. The purpose of the L2-class MASS seafarers suitability obligation system still needs to focus on the importance of human factors.
3.2. Variability in Formal Criteria
The definition of “seaworthiness” in common law can be found in McFadden v Blue Star Line, which considers seaworthiness to be as follows: “A vessel must have that degree of fitness which an ordinary careful and prudent owner would require his vessel to have at the commencement of her voyage having regard to all the probable circumstances of it.”7 Given the rapid development of ships and the many differences in the routes they experience and the situations they face, determining whether a ship meets “seaworthiness” should be analyzed on a case-by-case basis. In the case of Paper Traders Co. Ltd. (London, UK) And Others v. Hyundai Merchant Marine Co. Ltd. (Seoul, South Korea) And Another (The “European Dream”), Judge Cresswell proposed, “Seaworthiness must be judged by the standards and practices of the industry at the relevant time, at least so long as those standards and practices are reasonable.”8 This can prove that seaworthiness of ships is a concept that keeps up with the times. For the seafarer manning obligation for MASS, its formal standards have also undergone corresponding changes due to technological development.
3.2.1. An Analysis of Elements
International conventions provide for the seafarer manning obligation: Article 94 (b) of the United Nations Convention on the Law of the Sea requires flag states “to take such measures for ships flying its flag as are necessary to ensure safety at sea with regard the manning of ships, labour conditions and the training of crews, taking into account the applicable international instruments.” Article 14 of Chapter 5 of the International Convention for the Safety of Life at Sea (SOLAS) requires that ships “shall be sufficiently and efficiently manned.” As a result, it is generally accepted that ship manning should meet the minimum safety manning rules and be equipped with seafarer members with corresponding competency certificates. Deconstructing the general theory, the formal standard for ship manning obligation comprises three elements. One is the scope of seafarers, where the legal definition of “seafarers“ is clarified, as its interpretation can be vague. The second concerns the number of seafarers, where ships should be staffed with corresponding positions and seafarers to meet requirements of normal navigation, watch-keeping, and safe operations. The third is the quality of seafarers, ensuring that they possess the necessary knowledge and skills for safe ship navigation.
3.2.2. New Requirements for L2-Class MASS
The trend of traditional ships shifting towards L2-class MASS manning is that remote control and autonomous operation are the main operating modes, with some seafarer members transferring to shore-based remote control stations and some seafarer members remaining on board. Based on this, L2-class MASS have the following new requirements for formal standards:
In terms of seafarer scope, remote control and autonomous operation have broken the relationship between seafarers and the ship, and shore-based seafarers can effectively participate in ship operation activities. The change in job responsibilities requires the legal status of ROC personnel and on-board seafarers to be clarified.
In terms of seafarer quantity, due to the multiple functions involved in L2-class MASS, the variables for judging their manning level increase, and the technical level varies among different ships. The number of seafarer members equipped will have specific manning standards for specific MASS.
In terms of seafarer quality, due to the technological development of L2-class MASS, the content of tasks performed by seafarer members has changed, resulting in a corresponding change in ability requirements. Along with the trend of decreasing L2 MASS seafarers, the purpose of some of the seafarers on board the ship has changed compared to the traditional ship’s driving mode, and therefore the training method of their structure should also be reformed accordingly. For example, it is necessary to master technical abilities such as electronic and computer engineering, information technology systems, satellite communication technology, artificial intelligence and machine learning, troubleshooting, and integration systems based on shore-based and onboard operations. At the same time, the increase in communication between ships and shore-based operations highlights non-technical abilities such as communication, problem-solving, and leadership (Emad and Ghosh 2023). At the same time, it is possible to draw on aviation’s dynamic airspace management, as a three-tier response system could bridge regulatory gaps: (1) autonomous operations as default; (2) RCO intervention during anomalies; (3) onboard crew emergency takeover. Such a model aligns with the IMO’s flexibility principles while ensuring hierarchical accountability.
4. Legal Gap and Barriers
The current standards for ship manning obligations, based on regulations for traditional ships, do not adequately address the new requirements of L2-class autonomous vessels. The regulation of ship manning obligations is determined by the implementation of the principle provisions of international conventions, enforced by government regulatory agencies or classification societies of member states. Ships must undergo inspections by regulatory agencies or classification societies and obtain corresponding seafarer competency certificates and minimum safety manning certificates to ensure normal navigation and commercial operations. Additionally, the shipowners must provide documents and records during the implementation of the International Safety Management Code (the ISM Code) and the International Ship and Port Facility Security Code (the ISPS Code) to prove that meeting the formal requirements of seafarer liability becomes a prerequisite for the ship to be allowed to navigate.
If traditional legal standards for ship manning obligations are applied to L2-class MASS, this will create legal challenges regarding the scope, quantity, and qualifications of seafarers. Thus, this chapter will reveal the legal gap and barriers under Chinese law.
4.1. Limitation on the Scope of Seafarers
4.1.1. Definition
Through a comprehensive review of the definitions of “seafarer” in international maritime treaties and national laws, it is observed that some countries have recognized the urgent need for commercial unmanned shipping. Based on practical experiences with autonomous navigation, these countries are attempting to broadly interpret existing provisions or formulate new rules to remove legal barriers for commercial unmanned shipping. Such countries advocate defining seafarers based on the fulfillment of duties, thereby facilitating the recognition of ROC personnel as “seafarers” under the law. In contrast, other countries adhere to traditional definitions, stipulating that seafarers must perform their duties onboard and meet minimum crew requirements for safety, thereby precluding ROC personnel from obtaining the legal status of seafarers. The findings indicate that the majority of countries lean towards the former approach. With the continuous advancement of shipping technology, particularly artificial intelligence, the division of responsibilities among ROC personnel will become clearer, and the impact of physical distance on their work will further diminish.
In March 2017, the Comité Maritime International (CMI) International Working Group on Unmanned Ships organized the CMI Questionnaire on Unmanned Ships, which mentioned whether ROC personnel can constitute “seafarers.” The China Maritime Law Association stated that the definition of seafarer members in domestic law cannot cover ROC personnel (Xing and Zhu 2023). Meanwhile, Rules for Intelligent Ships (China Classification Society 2024) pioneers L2-class regulations, and its definition of “seafarer” diverges from the IMO’s ongoing MASS code discussions on ROC personnel statutes (IMO MSC 107/5/8, 2023), creating potential conflicts for vessels engaged in international voyages. Recent MSC 109 (2023) (IMO 2024b) deliberations highlight persistent divergence: while the non-binding MASS Code permits “functional equivalence” interpretations of seafarers (MSC.1/Circ.1638), China’s Rules for Intelligent Ships (China Classification Society 2024) retain location-based criteria. This misalignment may fragment RCO certification regimes, as evidenced by Norway’s domestic recognition versus STCW’s silence. Moreover, Article 14 of the EU AI Act mandates the “right to continuous human oversight,” which includes the ability to trace decisions made by ROC personnel. In contrast, the definition of “seafarer” under China’s regulations limits the inclusion of ROC personnel within the STCW certification system, which may create a regulatory gap. Such asymmetry may cause operational conflicts. Harmonizing standards through STCW revisions and competency frameworks for ROC personnel remains urgent.
The Maritime Law of the People’s Republic of China and the Regulations of the People’s Republic of China on Seafarers stipulate that a “seafarer” must serve on board a ship, with the location of work being a key factor in this definition. A textual analysis indicates that ROC personnel, who work at remote control stations, do not meet the legal definition of “seafarer” under current regulations. Furthermore, according to the People’s Republic of China Seagoing Seafarers Competency Examination and Certification Rules, seafarers are required to perform duties directly related to shipboard operations, a requirement that ROC personnel cannot fulfill. Under the Convention on the International Regulations for Preventing Collisions at Sea 1972, ROC personnel should also not be classified as “seafarers,” as lookout duties rely on the visual and auditory capabilities of onboard personnel. Current remote-control technology has not yet advanced to a level where it can demonstrate that ROC personnel can perform these duties equivalently to onboard seafarers.
4.1.2. The Adverse Effect
On the one hand, the job responsibilities of ROC personnel include both operators and monitors. They require not only a higher level of information processing ability and higher cognitive level but also a full understanding of the operating logic of autonomous systems (Yoshida et al. 2021). The significant differences in the obligations of ROC personnel highlight the importance of authority regulations, and it will help to clarify their work content, obligations, and consequences, achieving the goal of effective supervision and control of navigation risks.
On the other hand, there is a significant overlap in the jobs of ROC personnel and seafarers on board, especially in the event of unexpected circumstances. If these responsibilities are not clearly defined, the risk faced by seafarers at sea is much greater than that of ROC personnel. Due to this disparity in risk, ROC personnel may shift their obligations to onboard seafarers, thereby increasing their workload. This not only undermines the principles of navigation safety but also disrupts the working environment of L2-class MASS due to the imbalance of work obligations.
In addition, the carrier may not be able to enjoy the exemption of maritime negligence for shore-based operators. As mentioned above, while the introduction of new technologies for MASS may reduce the incidence of human errors, it also introduces new risks that must be addressed. According to legal interpretations, other employees should have the same or similar roles and functions as the captain, seafarers, and pilots. However, the constraints of the workplace prevent ROC personnel from being classified as such. Therefore, the carrier can no longer claim exemption from liability for maritime negligence in cases where ROC personnel are at fault. The inability to claim this exemption not only impedes the development of MASS but also fundamentally disrupts the risk-sharing framework in the shipping industry, potentially causing significant instability to the sector as a whole.
4.2. Conflicts with the Rules on Staffing
SOLAS Chapter V presupposes human decision-making in collision avoidance, reflecting a “human-centric presumption” in maritime conventions that lacks precedents for autonomous operations (Ringbom 2019). Article 14 of Chapter V of SOLAS requires ships to be equipped with a minimum safety manning document or equivalent issued by the Administration. In order to ensure the safety of seafarer members, IMO Resolution A1047 (27) sets out the principles for determining the minimum safe manning and requires member states to establish transparent procedures to determine the framework for the minimum safe manning (IMO 2011).
In the specific implementation process, the legal systems of different countries have different effects, including those that make comprehensive judgments on the minimum safety manning mode, as well as those that adopt strict judgments.9 The People’s Republic of China Minimum Safe Manning Rules for Ships adopt a combination of comprehensive standards and specific provisions, which stipulate the elements that should be considered in the minimum safety manning in the main text. At the same time, clear provisions are made in the annex for the minimum safety manning quantity in different tonnage and types of ships. Comprehensive standards provide room for adjustment in special circumstances, with specific provisions to ensure the implementation of core principles through clear standards. At present, the People’s Republic of China Minimum Safe Manning Rules for Ships do not address the special circumstances of MASS of different levels, and some provisions conflict with the manning mode of L2-class MASS.
Firstly, the “Minimum Safe Manning Rules for Ships” (Article 6) does not explicitly address autonomous or remote ship modes in its criteria.10 The legislation, developed for traditional ships, does not readily accommodate these new modes, hindering the adjustment of minimum manning levels for L2-class MASS.
Secondly, there is ambiguity in manning evaluation and approval procedures. L2-class MASS require specific crew sizes, and the evaluation and approval of minimum safe manning will be frequently necessary. The “Manning Rules” (Article 12) only mandate shipowners to explain the applicability of manning standards, lacking clear procedures for evaluation and approval.11
Thirdly, the specific standards are not flexible. China’s manning standards classify seafarer requirements based on tonnage, engine power, and navigation area. This rigid classification does not account for all scenarios, particularly as technological advancements become crucial for determining seafarer size for L2-class MASS.
4.3. Conflicts with the Seafarers Competency Requirements
The international conventions, including the 1978 International Convention on Standards of Training, Certification, and Watch-keeping for Seafarers (STCW Convention), the ISM Code, and the ISPS Code, establish the professional skills and safety requirements for seafarers. However, L2-class MASS significantly raise the competency requirements for seafarers, and the existing training and certification systems are insufficient to fully demonstrate their qualifications, particularly as there are no clear competency standards for ROC personnel. STCW certification lacks modules for remote emergency response, failing to address “situational awareness degradation” in shore-based crisis control identified as a key competency gap (Stępień 2023). Besides, the Tokyo MOU 2023 amendment explicitly links ROC personnel to MLC 2006′s “work-relatedness” standard, requiring fatigue management for ROC personnel. However, traditional manning rules (e.g., IMO Res.A.1047(27) (IMO 2011)) ignore cognitive loads from human–AI interaction, creating gaps in rest hour compliance.
Based on the 107th meeting of the MSC, regarding the training, certification, and competency requirements for MASS personnel, the IMO believes that the STCW Convention does not apply to shore-based operators.12 At the same time, since the STCW Convention applies only to traditional seafarers, carriers must bear a greater burden of proof regarding personnel competency. The legal ambiguity surrounding the status of ROC personnel was a central topic at the IMO MSC 110 in June 2025. While significant progress was made in finalizing the majority of the non-mandatory MASS Code, the chapter pertaining to the “human element” remains a subject of intense debate and was not fully finalized. This outcome is highly relevant to the legal status of ROC personnel. The international community had hoped that the finalization of the Code at MSC 110 would provide clear guidance on whether MASS personnel could be considered “crew members” under STCW and the MLC, as noted in document MSC 109/22.13 However, the deferral of consensus on this specific chapter means that the legal vacuum persists. Resolution MSC.428(98) passed by the IMO revised the ISM Code, encouraging shipowners, flag states, and other entities to ensure that the existing security management system addresses network risks no later than 1 January 2021. The resolution also explicitly states that under the objectives of the ISM Code, there should be “…the continuous improvement of safety management skill of personnel ashore and aboard ships” (Scanlan et al. 2022). The obligations set forth by the ISM and ISPS Codes are transferred to the carrier, requiring them to independently address crew training issues for MASS, which increases both operational costs and legal risks for the carrier.
5. Recommendations
The challenges mentioned above stem primarily from the fact that MASS technology has advanced beyond the scope of current legal frameworks, making it difficult to effectively regulate. Moreover, the mandatory formal requirements of the current duty to seafarers will seriously hinder the application and development of MASS. According to The Transportation 2040: Automation, Technology, and Employment, it is predicted that by around 2040, the number of MASS under human monitoring will reach about 15%, including ships equipped with different intelligent functions in the future (Schröder-Hinrichs et al. 2019). MASS represent the future of the maritime industry, offering potential improvements in working conditions, safety, solutions to seafarer shortages, and reductions in transportation costs and global emissions. The legal system should play a role in promoting the development of MASS. However, being constrained by formal requirements that affect the application and development of MASS is a behavior of “throwing out the baby with the bath water” (Bratić et al. 2019). This highlights the necessity of improving legal regulations on the form of seafarer manning obligations for L2-class MASS. This chapter provides practical and actionable recommendations on the status of MASS development.
5.1. Expanding the Explanation of the Concept of “Seafarers”
It is argued that including shore-based operators within the scope of seafarer members would fail to effectively distinguish between onshore and offshore work, affecting the interpretation of traditional ship seafarers laws and undermining the stability of seafarers laws (Stępień 2023). The above viewpoint is accurate based on the traditional environment of ships, but it is biased in the environment of MASS. It ignores the new changes brought about by the development of MASS technology. When remote operation can also achieve the goals of safe navigation and marine environmental protection, the existence of ROC personnel should be taken seriously.
Therefore, in response to the issue of seafarer identity for shore-based operators, it is necessary to expand the concept of “seafarers.” The focus will be on the responsibility of achieving maritime navigation safety and environmental protection in the concept of “seafarers.” Here, based on the summary of the concept of “seafarers” in the CMI Questionnaire on Unmanned Ships, it is emphasized that the definition of seafarers’ job responsibilities makes it easier to identify ROC personnel as seafarer members, while the definition of seafarer members working on the ship makes it easier to exclude shore-based control personnel from the scope of seafarer members (Han and Xia 2021). Scholars increasingly advocate for a control-centric definition: ROC personnel exercising continuous command over navigation safety (e.g., collision avoidance decisions) should qualify as seafarers regardless of location, as demonstrated in Norway’s Yara Birkeland project (Ahmed et al. 2024). This aligns with MSC 110′s ongoing work on competency frameworks.
The expansion of the concept of “seafarers” provides a platform for discussing the rights and obligations of ROC personnel, while the distinctions between the responsibilities of onboard seafarers and ROC personnel also need to be addressed. Equivalent rights and duties for similar roles can be regulated by analogy, while maritime-specific obligations require new legislation for ROC personnel. Human errors in remote control, such as neglect in multiple vessels monitoring and human–machine interaction issues, are key factors in emergency situations, with significant impacts on accident likelihood (Zhang et al. 2020). Therefore, in the process of formulating regulations, attention should be paid to the human errors discovered above.
Furthermore, ROC personnel will also need to assume predictive oversight responsibilities as part of their role, requiring transparency in autonomous systems to ensure proper decision-making. Autonomous operating systems need to overcome the “algorithmic black box” situation, where the thinking process of artificial intelligence may be based on patterns that humans cannot perceive, and humans cannot infer the intentions or behaviors of artificial intelligence. The concept of the “algorithmic black box” poses challenges, where operators may lose control due to over-reliance on systems they do not fully understand, which could lead to the erosion of seafaring professionalism and autonomy. This can lead to a range of effects such as loss of independent professionalism and loss of professional competence of seafarers, jeopardizing the prospects and development of the seafarer’s profession (Aalberg et al. 2024). To address this, autonomous systems should support human oversight by providing continuous access to relevant information and clarifying their internal logic (van de Merwe et al. 2024). Thus, regulatory measures should be strengthened to improve the supervisory role of ROC personnel.
5.2. Imo Improving the Principles, Procedures, and Standards of Minimum Safety Manning Rules
In Hong Kong First Shipping Ltd. v Kisen Kaisha Ltd., Judge Salmon believed that the number of seafarer members was not a key factor in determining the seaworthiness of a ship. If the seafarer members were effective and capable, even in the event of a shortage of seafarers members, the ship could still be seaworthy.14 In Burnard&Alger, Ltd. V. Player&Co., Judge Roche LJ gave a similar view that the number of seafarer members on board the ship was not the focus, but rather the need for a second person who could replace the position of First Officer due to the absence of the First Officer being deemed unsuitable for navigation.15 Thus, does this mean that the Minimum Safety Manning Rules for Ships are no longer important?
The author believes that the Minimum Safety Manning Rules for Ships are still important for L2-class MASS. The importance of human factors mentioned earlier has not changed. At the same time, this needs to be refined in order to balance the new risks of MASS with the risks of seafarers onboard and ROC personnel and to face the changes in the distribution of tasks on L2-class MASS.
5.2.1. Prediction of Changes I Task Allocation for L2-Class MASS
In MSC.1/Circ.1598 Seafarers Fatigue Guidelines, it is always emphasized to have sufficient seafarers manning to match the workload, not to make excessive demands, and to be able to cope with planned and unplanned training, injuries, work, and other situations.16 Conventional ships, due to the high cost and difficulty of crew rotations, need to maintain adequate staffing to ensure safe navigation. While MASS technologies may reduce the workload for specific roles, the associated tasks still remain. Adhering to traditional organizational structures may limit the potential for reducing crew numbers and hinder the development of fully autonomous vessels (Kooij and Hekkenberg 2021). In order to echo the human oversight requirements of the EU AI Act (Article 14), revised manning principles must integrate task-based risk assessment:
- Cognitive load metrics for ROC personnel monitoring multiple vessels;
- Algorithm transparency logs to audit fatigue triggers (e.g., unexplained AI decisions);
- MLC 2006-aligned rest periods counting shore-based control as “duty time.”
L2-class MASS should integrate duties and flexibly assign seafarers across departments to reduce overall staffing needs while also addressing the negative impact of high-skilled seafarers performing lower-skilled tasks on the working atmosphere (Kooij and Hekkenberg 2022). L2-class ships should move away from traditional departmental divisions and adopt task-based flexible manning standards. Additionally, the trend towards shore-based operations can improve rotation efficiency and mitigate personnel shortages, suggesting that minimum staffing requirements should be relaxed accordingly.
5.2.2. Proposed Revisions to MSMD
Based on the above changes in the distribution of obligations, the following revisions are proposed in this section:
Firstly, improve the principle of the Minimum Safety Manning Document (MSMD) for Ships. In IMO Resolution A1047 (27), the level of ship automation and shore-based support have been included as judgment factors in the minimum safety manning principle. The above elements need to be added to the minimum safety manning principle in Article 6, so that L2-class MASS can be included in the regulation of the MSMD for Ships.
Secondly, establish minimum safety manning review procedures. Based on the diversity of personnel on location for L2-class MASS, on the one hand, it is necessary to strengthen the obligation of shipping companies to explain in detail the number of personnel allocation for L2-class MASS and specify the reasons, in order to improve the verification efficiency of regulatory agencies. On the other hand, it is necessary to improve the evaluation and approval procedures for the minimum safety manning of L2-class MASS, improve efficiency and credibility through clear and transparent systems, and meet the requirements of transparent procedures in the resolution.
Thirdly, break through the rules of ship manning table. Due to the fact that L2-class MASS are still in the development stage, sufficient experience accumulation is needed to understand the specific setting of the minimum safety personnel allocation. Additionally, as mentioned in MSC 109/5, the MSMD for the MASS may carry a total manning number of 0 (zero) and may reference personnel training and certification requirements as specified in this Code (IMO 2024b). Therefore, before the formation of the L2-class autonomous vessel manning table, it is necessary to clarify in the rules that as long as the autonomous vessel can meet the evaluation and safety standards and ensure maritime navigation safety, it does not need to be limited by the current ship manning table. For instance, during the 109th meeting of MSC, the IMO emphasized that remote operation centers (ROCs) must remain operational and accessible for accident response at all times. This requirement specifically applies to ROC personnel of L2 MASS, necessitating their active participation in emergency protocols. Consequently, revising the MSMD would serve to harmonize and clarify the legal status of ROC personnel, ensuring alignment with evolving regulatory frameworks for autonomous navigation systems.
5.3. Leading Seafarers Competency Standards to Keep Up with the Times
Traditional navigation techniques, safety management systems, and safety assurance systems remain the foundation of seafarers’ competency standards. The critical role of traditional navigation skills for seafarers onboard is well-established. ROC personnel must also grasp these fundamentals, because the decision-making and response logic in remote mode still adhere to current navigation regulations. Only by understanding the ship’s environment, cargo and stability, equipment, and functions can ROC personnel have the ability to handle emergencies. The safety management system and safety assurance system regulate and manage all tasks during ship navigation, with clear guidelines on operational standards and emergency responses to ensure safety. Based on the different degrees of autonomy among L2-class MASS, tasks and operations will differ significantly, making the implementation of safety management and safety assurance systems more crucial.
Secondly, the application of new skills and training methods for seafarers should be promoted. In the MSC 107/5/6 meeting minutes, Japan proposed the minimum competency requirements for seafarers on board MASS, including understanding the operating logic and control methods of the system, understanding the task allocation between the system and sailors, and evaluating the ability to operate the system.17 In the MSC 107/5/8 meeting minutes, South Korea and the International Federation of Transport Workers proposed the minimum requirements for ROC personnel to perform navigation duty, including information processing ability, ship situational awareness ability, detection ability of communication and remote control programs, and defense against network attacks.18 The draft MASS Code, a central topic of discussion at MSC 110, is moving to codify these new standards. Proposals from maritime nations and labor federations highlight the need for proficiency in advanced information processing, enhanced ship situational awareness derived from sensor fusion, mastery of remote control and communication protocols, and robust capabilities in defending against and responding to network attacks. The above requirements are obviously higher than those of traditional seafarers, which requires innovative curriculum design for seafarers training. At the same time, the channels for seafarers to acquire new skills also need innovation. Through new training methods such as online courses, virtual reality technology simulation training, cloud-based data training, and integrated training simulating future remote-operated vessels (Janssen et al. 2023), seafarers can learn the skills required for MASS more quickly and efficiently, facilitating the swift transition from traditional seafarers to those required for MASS. This approach effectively addresses the talent shortage in the field of autonomous shipping and supports the ongoing development of training standards tailored to autonomous ships. It can also restore the effectiveness of competency certificates for onboard seafarers and ROC personnel and reduce the burden of proof of competency and training for carrier seafarers.
Navigation colleges and shipping companies, as the main entities responsible for seafarers’ education and training, must adapt to evolving needs. Firstly, educational programs should integrate new courses covering network information knowledge, automation knowledge, information physics system knowledge, big data knowledge, autonomous navigation, collision avoidance technology and remote control, etc., to cultivate a diverse range of skills suitable for autonomous shipping. Secondly, in terms of training, existing seafarers should receive updated training to meet new job requirements. Thirdly, the introduction of these new courses will necessitate either the hiring of new instructors or the retraining of current instructors to align with the advancements and changes in navigation education brought about by autonomous ships.
5.4. Implementation of an Open Navigation Test Permit System
The effective implementation of laws and regulations for MASS relies heavily on practical testing. Summarizing experience through MASS navigation tests is the most direct and effective way to formulate technical rules and related standards. Establishing these standards is crucial for defining the legal framework governing seafarer responsibilities in relation to MASS. MSC.1/Circ.1604, as a temporary guideline for MASS testing, provides a path and guiding principles for promoting the development of MASS. Countries committed to the development of independent ships have responded (Figure 2) (UK Department for Transport 2021).

Figure 2.
Implementations of regulations.
The aforementioned national systems demonstrate the need to prioritize the establishment of a permit system for MASS navigation trials. The aviation industry analogy is relevant to maritime law, as both face jurisdictional challenges for remote-controlled vehicles. For example, admiralty jurisdiction debates in aviation (e.g., Executive Jet case) inform maritime approaches to defining “master” roles for ROCs, illustrating how cross-sector lessons can reconcile immutable obligations with technological shifts (Sanger and Brandt 2003). Navigation trials should test aviation-inspired response protocols, particularly RCO-shore coordination under simulated system failures, to validate tiered accountability frameworks prior to mandatory code implementation. This should be done while safeguarding navigation safety and the marine environment, fostering an inclusive and open environment for autonomous navigation tests, and laying the foundation for the development of a legal framework for seafarer obligations.
6. Conclusions
The rapid development of MASS heralds a transformative shift in the global shipping ecosystem. However, the existing legal frameworks, predominantly designed for traditional vessels, remain inadequate to address the regulatory complexities posed by L2 autonomous ships. The ascent of L2 autonomous ship technology represents a pivotal moment for international shipping, demanding a transition from fragmented national rules to cohesive global norms. This paper has argued that for China, a leader in intelligent ship development, the next critical step is the strategic alignment of its domestic regulatory framework, primarily the CCS Rules for Intelligent Ships, with the rapidly solidifying IMO MASS Code. While China’s proactive regulatory development has provided a vital foundation, its long-term success hinges on ensuring seamless interoperability within the emerging international legal structure. Our analysis reveals that achieving this alignment requires targeted reforms centered on the human element, particularly the qualifications and legal standing of remote operators.
Our central finding is that while the CCS rules have addressed many technical aspects of autonomous systems, a potential divergence exists with the IMO’s approach to the human element, which will be codified in the MASS Code. The IMO, through its MSC and associated working groups, is developing a goal-based instrument that defines personnel like “ROC personnel” and facilities like “ROCs” in a manner intended for global application. This creates an imperative for China to adapt its national standards to avoid regulatory friction that could impede the international operation of Chinese-flagged L2 vessels.
To address these challenges, this paper proposes a four-pronged reform agenda aimed at aligning China’s L2 autonomous ship regulations with global norms: (1) Expanding the Definition of “Seafarer” to include RCOs based on functional equivalence rather than physical presence, consistent with IMO discussions and international practice. (2) Modernizing Minimum Safe Manning Principles and Procedures by incorporating automation levels and shore-based support into manning assessments, establishing clear review procedures, and allowing flexibility beyond traditional manning tables. (3) Updating Seafarer Competency Standards to include new technical and non-technical skills required for L2 MASS, leveraging innovative training methods and curriculum reforms. (4) Implementing an Inclusive Navigation Testing Permit System to facilitate real-world validation of manning models and inform the development of technical and regulatory standards.
Furthermore, international regulatory developments, such as the EU AI Act, underscore the importance of human oversight and transparency in autonomous systems, offering additional perspectives for refining L2 MASS manning structures. The ongoing IMO MASS Code negotiations highlight the urgency for national jurisdictions like China to harmonize domestic rules with global standards to ensure both safety and interoperability.
In conclusion, while the current legal framework remains rooted in traditional maritime practices, the inevitable integration of MASS into global shipping necessitates proactive regulatory evolution. By aligning China’s L2 autonomous ship regulations with the IMO MASS Code, policymakers can not only remove barriers to innovation but also contribute to the development of a cohesive and adaptive global regulatory framework for autonomous shipping.
Author Contributions
Conceptualization, Y.P.; methodology, Y.P. and Y.Y.; investigation, X.H.; resources, Y.P.; data curation, Y.Y.; writing—original draft preparation, Y.P., X.H. and R.F.; writing—review and editing, Y.P.; visualization, X.H.; project administration, Y.P. and Y.Y.; funding acquisition, Y.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Development Research Center of Shanghai Municipal People’s Government, grant number 2024-Z-H02.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Aalberg, Asbjørn Lein, Siri Mariane Holen, Trond Kongsvik, and Aud Marit Wahl. 2024. Does it do the same as we would? How trust in automated shipboard systems relates to seafarers’ professional identity. Safety Science 172: 106426. [Google Scholar] [CrossRef]
- Ahmed, Yaseen Adnan, Gerasimos Theotokatos, Ilia Maslov, Lars Andreas Lien Wennersberg, and Dag Atle Nesheim. 2024. Regulatory and legal frameworks recommendations for short sea shipping maritime autonomous surface ships. Marine Policy 166: 106226. [Google Scholar] [CrossRef]
- Bratić, Karlo, Ivan Pavić, Srđan Vukša, and Ladislav Stazić. 2019. A review of autonomous and remotely controlled ships in maritime sector. Transactions on Maritime Science 8: 253–65. [Google Scholar] [CrossRef]
- Chae, Chong-Ju, Mingyu Kim, and Hyung-Ju Kim. 2020. A Study on Identification of Development Status of MASS Technologies and Directions of Improvement. Applied Sciences 10: 4564. [Google Scholar] [CrossRef]
- China Classification Society. 2024. Rules for Intelligent Ships. Beijing: China Classification Society. Available online: https://www.ccs.org.cn/ccswzen/file/download?fileid=202405080712174186 (accessed on 28 August 2025).
- Emad, Gholam Reza, and Samrat Ghosh. 2023. Identifying Essential Skills and Competencies towards Building a Training Framework for Future Operators of Autonomous Ships: A Qualitative Study. WMU Journal of Maritime Affairs 22: 427–45. [Google Scholar] [CrossRef]
- Eriksen, Stig, and Marie Lützen. 2022. Manning the unmanned ship: Is safe manning legislation a bottleneck in the development of autonomous ships? Autonomous Ships 2022: 37–46. [Google Scholar] [CrossRef]
- Fan, Shiqi, Eduardo Blanco-Davis, Zaili Yang, Jinfen Zhang, and Xinping Yan. 2020. Incorporation of Human Factors into Maritime Accident Analysis Using a Data-Driven Bayesian Network. Reliability Engineering & System Safety 203: 107070. [Google Scholar] [CrossRef]
- Fan, Shiqi, Jinfen Zhang, Eduardo Blanco-Davis, Zaili Yang, Jin Wang, and Xinping Yan. 2018. Effects of Seafarers’ Emotion on Human Performance Using Bridge Simulation. Ocean Engineering 170: 111–19. [Google Scholar] [CrossRef]
- Han, Lin, and Wei Xia. 2021. Autonomous Ships in China: Policies and Regulations (Chinese Text). Marine Law & Policy 47: 53. [Google Scholar]
- Hao, Guozhu, Wenhui Xiao, Liwen Huang, Jiahao Chen, Ke Zhang, and Yaojie Chen. 2024. The analysis of intelligent functions required for inland ships. Journal of Marine Science and Engineering 12: 836. [Google Scholar] [CrossRef]
- Heffner, Kevin, and Ørnulf Jan Rødseth. 2019. Enabling technologies for maritime autonomous surface ships. IOP Conference Series: Journal of Physics: Conference Series 1357: 012021. [Google Scholar] [CrossRef]
- International Maritime Organization (IMO). 2011. Resolution A.1047(27). Available online: https://wwwcdn.imo.org/localresources/en/OurWork/HumanElement/Documents/1047(27).pdf (accessed on 23 February 2025).
- International Maritime Organization (IMO). 2024a. MSC 108/4 Annex 1. Available online: https://docs.imo.org/Shared/Download.aspx?did=147939 (accessed on 23 February 2025).
- International Maritime Organization (IMO). 2024b. MSC 109/5. Available online: https://www.imokorea.org/upfiles/board/92.%20ISWG-MASS%203%C2%F7%20%B0%E1%B0%FA%BA%B8%B0%ED%BC%AD%28%BF%B5%B9%AE%29.pdf (accessed on 23 February 2025).
- International Maritime Organization (IMO). 2025a. Autonomous shipping. Available online: https://www.imo.org/en/mediacentre/hottopics/pages/autonomous-shipping.aspx (accessed on 20 August 2025).
- International Maritime Organization (IMO). 2025b. MSC 110/5/1. Available online: https://docs.imo.org (accessed on 20 August 2025).
- International Maritime Organization (IMO). 2025c. MSC 110/5/14. Available online: https://docs.imo.org (accessed on 20 August 2025).
- Janssen, T., M. Baldauf, and G. Claresta. 2023. From ship to shore–studies into potential practical consequences of autonomous shipping on VTS operation and training. TransNav: International Journal on Marine Navigation and Safety of Sea Transportation 17: 383–90. [Google Scholar] [CrossRef]
- Jo, Sohyun, Enrico D’Agostini, and Jun Kang. 2020. From seafarers to e-farers: Maritime cadets’ perceptions towards seafaring jobs in the Industry 4.0. Sustainability 12: 8077. [Google Scholar] [CrossRef]
- Kassem, Ahmad Hussam. 2006. Carriage of Goods by Sea: The Legal Aspects of Seaworthiness: Current Law and Development. Saarbrücken: Lambert Academic Publishing. [Google Scholar]
- Kooij, C., A. A. Kana, and R. G. Hekkenberg. 2023. A task-based analysis of the economic viability of low manned and unmanned cargo ship concepts. Ocean Engineering 242: 110111. [Google Scholar] [CrossRef]
- Kooij, Carmen, and Robert Hekkenberg. 2021. The effect of autonomous systems on the crew size of ships–a case study. Maritime Policy & Management 48: 860–76. [Google Scholar]
- Kooij, Carmen, and Robert Hekkenberg. 2022. Identification of a task-based implementation path for unmanned autonomous ships. Maritime Policy & Management 49: 954–70. [Google Scholar]
- Meštrović, Toni, Ivica Pavić, Mislav Maljković, and Andrej Androjna. 2024. Challenges for the education and training of seafarers in the context of autonomous shipping: Bibliometric analysis and systematic literature review. Applied Sciences 14: 3173. [Google Scholar] [CrossRef]
- Nawrot, Justyna, and Zuzanna Pepłowska-Dąbrowska. 2019. Revolution or evolution? Challenges posed by autonomous vessels for national and international legal framework. Comparative Law Review 25: 239–55. [Google Scholar] [CrossRef][Green Version]
- Ringbom, Henrik. 2019. Regulating autonomous ships—Concepts, challenges and precedents. Ocean Development & International Law 50: 141–69. [Google Scholar] [CrossRef]
- Saha, Rana. 2021. Mapping competence requirements for future shore control center operators. Maritime Policy & Management 50: 415–27. [Google Scholar] [CrossRef]
- Sanger, Ladd, and Vickie S. Brandt. 2003. Flying and Crashing on the Wings of Fortuosity: The Case for Applying Admiralty Jurisdiction to Aviation Accidents over Navigable Waters. Journal of Air Law and Commerce 68: 283–338. [Google Scholar]
- Scanlan, Joel, Rory Hopcraft, Richard Cowburn, and Margareta Lützhöft. 2022. Maritime Education for a Digital Industry. University of Tasmania, Journal Contribution. Available online: https://hdl.handle.net/102.100.100/490503 (accessed on 23 February 2025).
- Schröder-Hinrichs, Jens-Uwe, Dong-Wook Song, Tiago Fonseca, Khanssa Lagdami, Xiaoning Shi, and Karsten Loer. 2019. Transport 2040: Automation, Technology, Employment-The Future of Work. Transport 2040. Malmö: World Maritime University. [Google Scholar]
- So, Lok Kan, and Poommintr Sooksripaisarnkit. 2021. Seaworthiness and autonomous ships: Legal implications in the 21st century. Australia and New Zealand Maritime Law Journal 35: 20. [Google Scholar]
- Stępień, Barbara. 2023. Can a ship be its own captain? Safe manning of autonomous and uncrewed vessels. Marine Policy 148: 105451. [Google Scholar] [CrossRef]
- Šikić, Mario, Andro Jančić, Mihovil Jureško, and Đani Mohović. 2023. Analysis of Risks Arising from the Use of Autonomous Vessels. Pomorski Zbornik 63: 63–74. [Google Scholar] [CrossRef]
- Trees, Shanice N. 2023. Uncharted legal waters: The application of the law on seaworthy & good seamanship to autonomous vehicles. In The Regulation of Automated and Autonomous Transport. Cham: Springer International Publishing, p. 205. [Google Scholar]
- UK Department for Transport. 2021. Future of Transport Regulatory Review Consultation: Maritime Autonomy and Remote Operations. Available online: https://www.gov.uk/government/consultations/future-of-transport-regulatory-review-maritime-autonomy-and-remote-operations/future-of-transport-regulatory-review-maritime-autonomy-and-remote-operations (accessed on 23 February 2025).
- Vakil, Sanjeev S. 2022. Overview of autonomous ships classification. Journal of the Institution of Engineers (India): Series C 103: 889–93. [Google Scholar] [CrossRef]
- van de Merwe, Koen, Steven Mallam, Salman Nazir, and Øystein Engelhardtsen. 2024. Supporting human supervision in autonomous collision avoidance through agent transparency. Safety Science 169: 106329. [Google Scholar] [CrossRef]
- Wang, Hongdong, and Chun Yu. 2020. Development and response strategies of intelligent ship remote control technology. China Shipyard Inspection 11: 59–60. [Google Scholar]
- Wang, Le, Qing Wu, Jialun Liu, Shijie Li, and Rudy R. Negenborn. 2019. State-of-the-art research on motion control of maritime autonomous surface ships. Journal of Marine Science and Engineering 7: 438. [Google Scholar] [CrossRef]
- Xing, Wangwang, and Ling Zhu. 2023. Exploring Legal Gaps and Barriers to the Use of Unmanned Merchant Ships in China. Marine Policy 153: 105662. [Google Scholar] [CrossRef]
- Yoshida, Masanori, Etsuro Shimizu, Masashi Sugomori, and Ayako Umeda. 2021. Identification of the Relationship between Maritime Autonomous Surface Ships and the Operator’s Mental Workload. Applied Sciences 11: 2331. [Google Scholar] [CrossRef]
- Zhang, Mingyang, Di Zhang, Houjie Yao, and Kai Zhang. 2020. A probabilistic model of human error assessment for autonomous cargo ships focusing on human–autonomy collaboration. Safety Science 130: 104838. [Google Scholar] [CrossRef]
| 1 | Intelligent Shipping 2020—Record MASS-related technologies, regulations, and news websites. https://www.mass2020.info/ (accessed on 23 February 2025). |
| 2 | UNCLOS acronym commonly refers to the 1982 Convention, while LOSC denotes the treaty; this paper uses UNCLOS for consistency with maritime law scholarship. |
| 3 | International Maritime Organization (IMO). International Convention on Standards of Training, Certification and Watchkeeping for Seafarers. 1978, amended 2010. https://www.imo.org/en/OurWork/HumanElement/Pages/STCW-Convention.aspx (accessed on 23 February 2025). |
| 4 | International Labour Organization (ILO). Maritime Labour Convention. 2006, amended 2022. https://www.ilo.org/international-labour-standards/maritime-labour-convention-2006 (accessed on 23 February 2025). |
| 5 | Regulation (EU) 2024/1689 of the European Parliament and of the Council of 13 June 2024 Laying Down Harmonised Rules on Artificial Intelligence and Amending Regulations. |
| 6 | 190 F.3d 64, 1999 AMC 2705 (1999). |
| 7 | (1905) 1 KB 697. |
| 8 | [2002] EWHC 118 (Comm). |
| 9 | Comité Maritime International (CMI). 2024. Questionnaire on Unmanned Ships. Available online: https://comitemaritime.org/work/unmanned-ships/ (accessed on 19 February 2025). |
| 10 | Minimum Safety Manning Rules of the People’s Republic of China for Ships Article 6. The determination of the minimum safety manning standards for ships shall comprehensively consider factors such as the type of ship, tonnage, technical condition, main propulsion power device power, navigation area, voyage, navigation time, navigation environment, seafarers duty, rest system, etc. |
| 11 | Regulations of the People’s Republic of China on the Minimum Safety Manning of Ships Article 12, Paragraph 1, “When applying for ship nationality registration, the ship owner shall state in accordance with the provisions of these regulations how the corresponding standards in the appendix of these regulations are applied to the minimum safety Manning of their ship, and may include special explanations for reducing or exempting Manning.” |
| 12 | IMO, Maritime Safety Committee (MSC 107), 31 May–9 June 2023. Available online: https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/MSC-107th-session.aspx (accessed on 23 February 2025) |
| 13 | IMO, MSC 109, (2–6 December 2024), https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/MSC-109th-session.aspx (accessed on 23 February 2025) |
| 14 | (1962) EWCA Civ 7. |
| 15 | (1928) 31 Ll L. Rep. 281. |
| 16 | International Maritime Organization (IMO). 2024. MSC.1/Circ.1598. https://www.register-iri.com/wp-content/uploads/MSC.1-Circ.1598.pdf (accessed on 16 February 2024). |
| 17 | IMO, MSC 107/5/6. Available online: https://docs.imo.org/Shared/Download.aspx?did=141875 (accessed on 23 February 2025) |
| 18 | IMO, MSC 107/5/8. Available online: https://docs.imo.org/Shared/Download.aspx?did=141867 (accessed on 23 February 2025). |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).