by
Rached Dhaouadi *,† , Mohannad Takrouri † and Ishaq Hafez †
, Mohannad Takrouri † and Ishaq Hafez †
, Mohannad Takrouri † and Ishaq Hafez †
1
College of Engineering, American University of Sharjah, Sharjah 26666, United Arab Emirates
†
These authors contributed equally to this work.
Electronics 2023, 12(4), 977; https://doi.org/10.3390/electronics12040977 - 15 Feb 2023
Cited by 3 | Viewed by 2318
Abstract
This paper presents a new sinusoidal position-tracking control scheme with a resonant controller for linear motor drive systems. The sinusoidal tracking controller is designed without any added algorithm for system identification and requires only approximate values of the mechanical parameters. Therefore, the controller
[...] Read more.
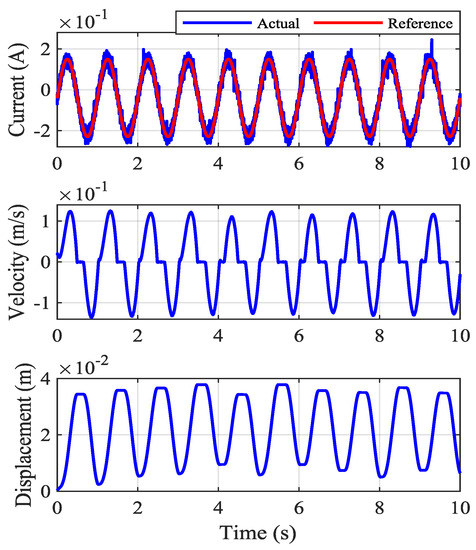
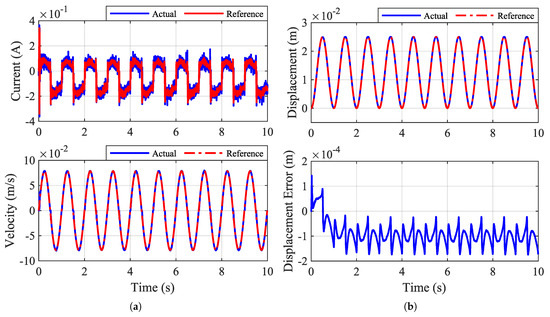
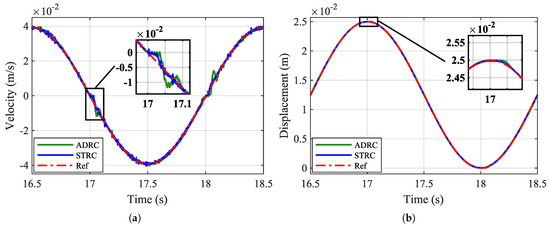
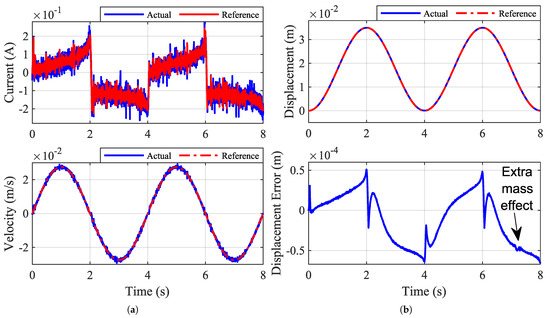
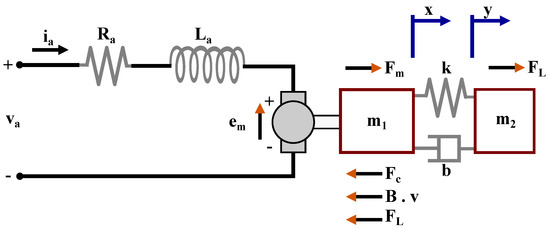
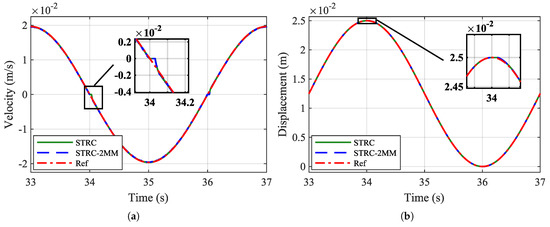
This paper presents a new sinusoidal position-tracking control scheme with a resonant controller for linear motor drive systems. The sinusoidal tracking controller is designed without any added algorithm for system identification and requires only approximate values of the mechanical parameters. Therefore, the controller is simple and robust to parameter variations. The proposed sinusoidal tracking resonant-based controller (STRC) is designed to track reference positions using a cascade control structure with an inner current/force control with hysteresis current control followed by a speed control loop with a resonant controller, and an outer position loop with a proportional and velocity-feedforward controller. The stability of the cascade feedback scheme and its parameter tuning are analyzed using the Routh–Hurwitz criterion. The performance of the proposed control scheme is validated using simulations and experiments on a voice-coil linear stage. The proposed STRC strategy is characterized by ease of implementation and shows excellent performance with fast response and high accuracy at different frequencies with a maximum error of 0.58% at 0.25 Hz.
Full article
(This article belongs to the Special Issue Advanced Modelling and Control of Complex Nonlinear Mechatronic Systems–Volume II)
▼
Show Figures

Figure 1






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}