by
Haiyan Gao 1,* , Zhichao Chen 1 and Weiqiang Tang 2
, Zhichao Chen 1 and Weiqiang Tang 2
, Zhichao Chen 1 and Weiqiang Tang 2
1
Xiamen Key Laboratory of Frontier Electric Power Equipment and Intelligent Control, School of Electrical Engineering and Automation, Xiamen University of Technology, Xiamen 361024, China
2
College of Electrical and Information Engineering, Lanzhou University of Technology, Lanzhou 730050, China
Appl. Sci. 2023, 13(8), 5154; https://doi.org/10.3390/app13085154 - 20 Apr 2023
Cited by 4 | Viewed by 1803
Abstract
A novel dynamic inverse control method based on a dynamical neural network (DNN) is proposed for the trajectory tracking control of a flexible air-breathing hypersonic vehicle (FAHV). Firstly, considering that the accurate model of FAHV is difficult to obtain, the FAHV is regarded
[...] Read more.
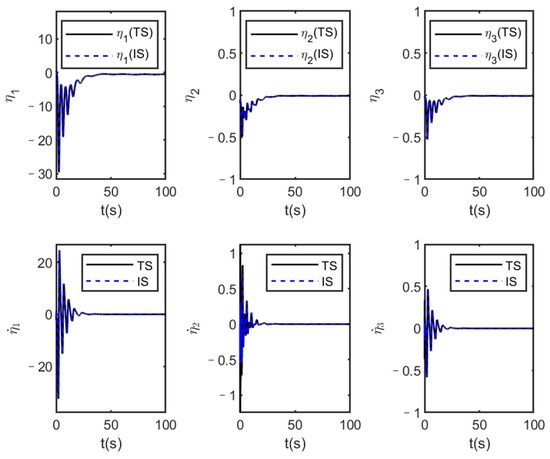
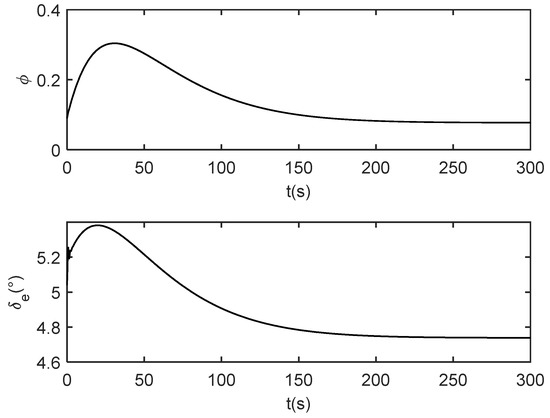
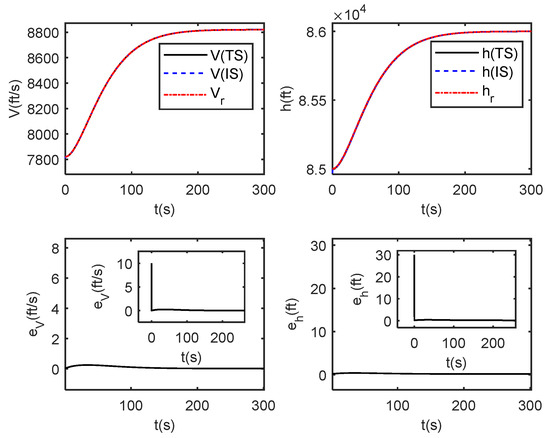
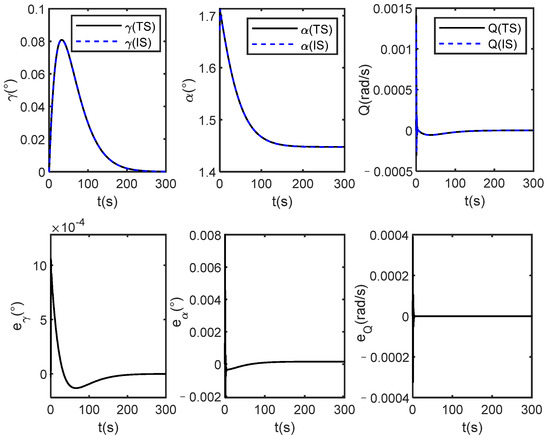
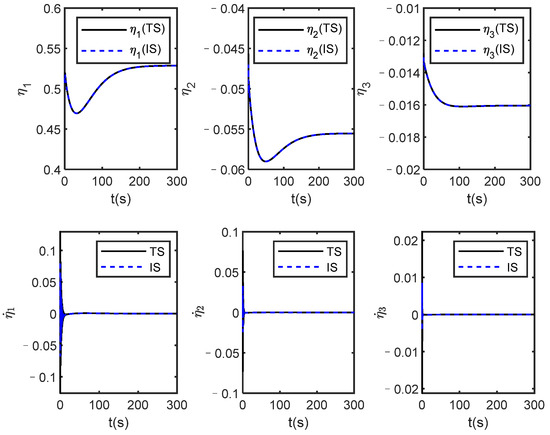
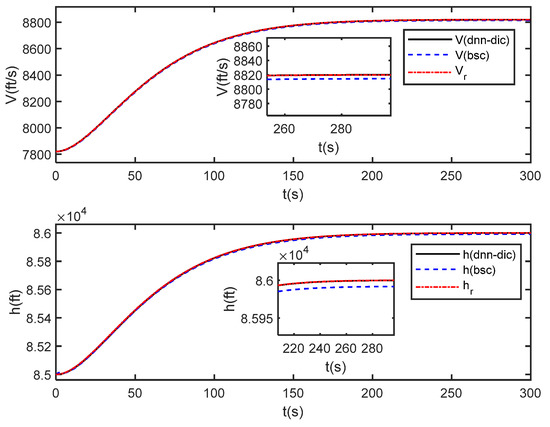
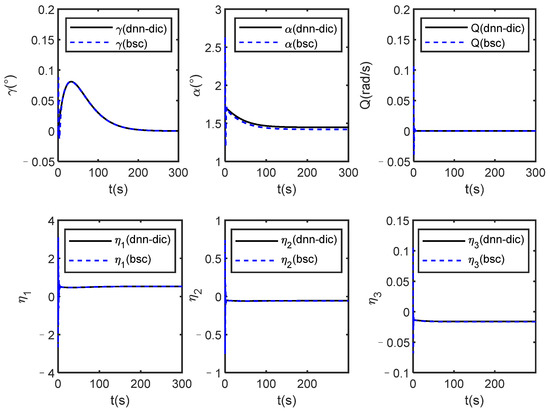
A novel dynamic inverse control method based on a dynamical neural network (DNN) is proposed for the trajectory tracking control of a flexible air-breathing hypersonic vehicle (FAHV). Firstly, considering that the accurate model of FAHV is difficult to obtain, the FAHV is regarded as a completely unknown system, and a DNN is designed to identify its nonlinear model. On the basis of Lyapunov’s second law, the weight vectors of the DNN are adaptively updated. Then, a dynamic inverse controller is designed based on the identification model, which avoids the transformation of the nonlinear model of FAHV, thereby simplifying the controller design process. The simulation results verify that the DNN can identify FAHV accurately, and velocity and altitude can track the given reference signal accurately with the proposed dynamic inverse control method. Compared with the back-stepping control method, the proposed method has better tracking accuracy, and the amplitude of the initial control law is smaller.
Full article
(This article belongs to the Special Issue Advanced Guidance and Control of Hypersonic Vehicles)
▼
Show Figures
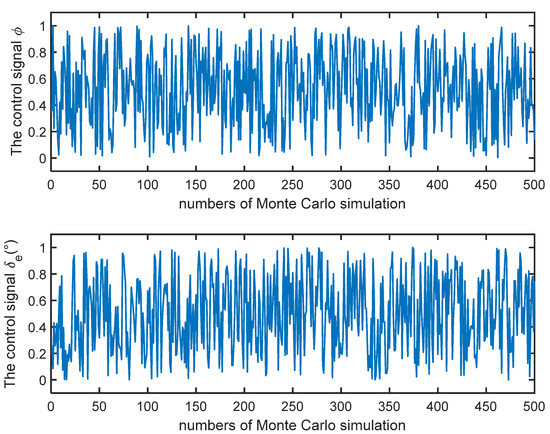
Figure 1











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}