


Drones 2026, 10(6), 412; https://doi.org/10.3390/drones10060412 - 26 May 2026
Abstract
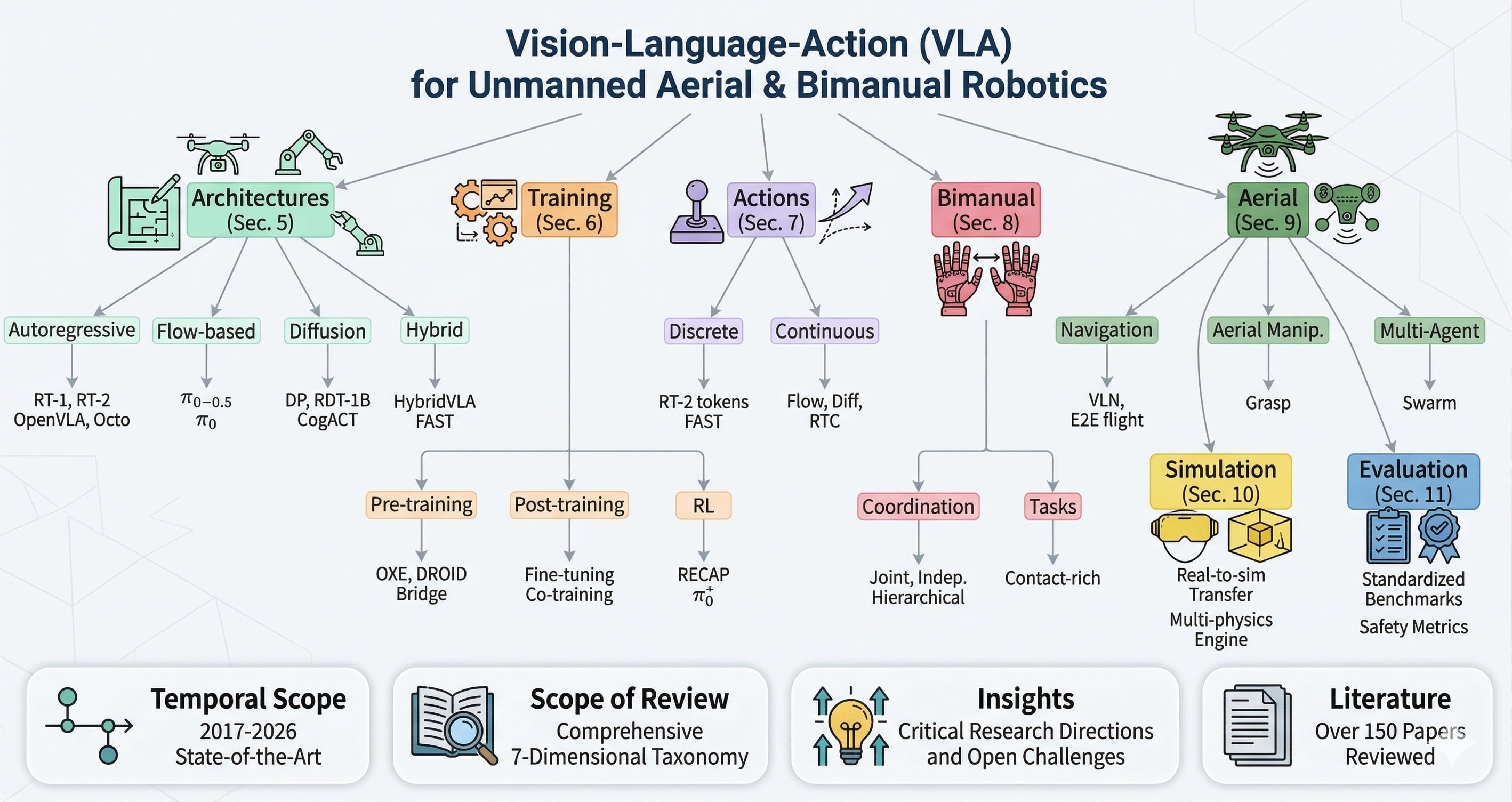
Vision–Language–Action (VLA) models unify visual perception, natural-language understanding, and action generation within a single foundation model, allowing a robot to follow instructions such as “fold the towel” or “fly to the red building” directly from camera images. Because VLAs inherit world knowledge from
[...] Read more.
Vision–Language–Action (VLA) models unify visual perception, natural-language understanding, and action generation within a single foundation model, allowing a robot to follow instructions such as “fold the towel” or “fly to the red building” directly from camera images. Because VLAs inherit world knowledge from internet-scale pre-training, they have become the dominant framework for learning-based manipulation, with bimanual coordination serving as the most demanding testbed: two arms with
(This article belongs to the Special Issue Advances in Deep Learning for Drones and Its Applications: 3rd Edition)
►
Show Figures
Graphical abstract















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}