Sensors 2022, 22(24), 9601; https://doi.org/10.3390/s22249601 - 7 Dec 2022
Cited by 7 | Viewed by 4367
Abstract
The rapid change of motion direction during running is beneficial to improving the movement flexibility of the quadruped robot, which is of great relevance to its research. How to make the robot change its motion direction during running and achieve good dynamic stability
[...] Read more.
The rapid change of motion direction during running is beneficial to improving the movement flexibility of the quadruped robot, which is of great relevance to its research. How to make the robot change its motion direction during running and achieve good dynamic stability is a problem to be solved. In this paper, a method to change the running direction of the cheetah-inspired quadruped robot is proposed. Based on the analysis of the running of the cheetah, a dynamic model of the quadruped robot is established, and a two-level stability index system, including a minimum index system and a range index system, is proposed. On this basis, the objective function based on the stability index system and optimization variables, including leg landing points, trunk movement trajectory, and posture change rule, are determined. Through these constraints, the direction changes with good dynamic stability of the cheetah-inspired quadruped robot during running is realized by controlling the leg parameters. The robot will not roll over during high-speed movement. Finally, the correctness of the proposed method is proven by simulation. This paper provides a theoretical basis for the quadruped robot’s rapid change of direction in running.
Full article
(This article belongs to the Special Issue Advanced Intelligent Control in Robots)
►
Show Figures
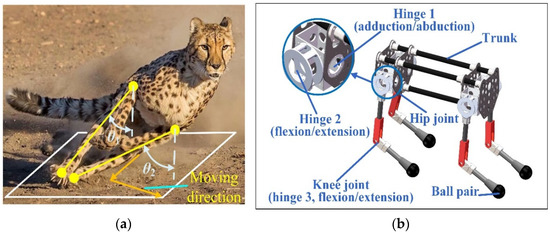
Figure 1






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}