Sensors 2021, 21(9), 3282; https://doi.org/10.3390/s21093282 - 10 May 2021
Cited by 19 | Viewed by 4421
Abstract
We propose an asynchronous acoustic chirp slope keying to map short bit sequences on single or multiple bands without preamble or error correction coding on the physical layer. We introduce a symbol detection scheme in the demodulator that uses the superposed matched filter
[...] Read more.
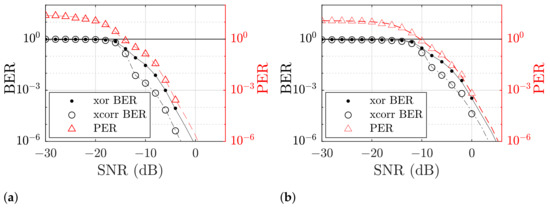
We propose an asynchronous acoustic chirp slope keying to map short bit sequences on single or multiple bands without preamble or error correction coding on the physical layer. We introduce a symbol detection scheme in the demodulator that uses the superposed matched filter results of up and down chirp references to estimate the symbol timing, which removes the requirement of a preamble for symbol synchronization. Details of the implementation are disclosed and discussed, and the performance is verified in a pool measurement on laboratory scale, as well as the simulation for a channel containing Rayleigh fading and Additive White Gaussian Noise. For time-bandwidth products (TB) of 50 in single band mode, a raw data rate of 100 bit/s is simulated to achieve bit error rates (BER) below 0.001 for signal-to-noise ratios above −6 dB. In dual-band mode, for TB of 25 and a data rate of 200 bit/s, the same bit error level was achieved for signal-to-noise ratios above 0 dB. The simulated packet error rates (PER) follow the general behavior of the BER, but with a higher error probability, which increases with the length of bits in each packet.
Full article
(This article belongs to the Special Issue Applications of Ultrasonic Sensors)
►
Show Figures
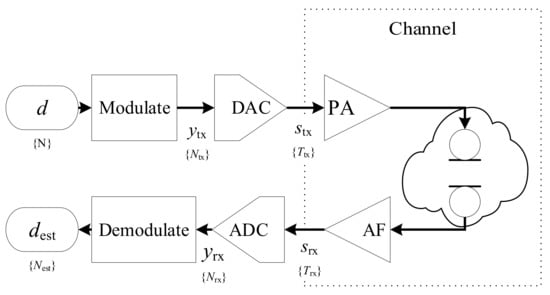
Figure 1





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}