4.1. DOA Estimation for ID Source
For the VMIMO system, the existing subspace-based and covariance matching-based algorithms are sophisticated for 2D DOA estimation, because of their tremendous computational complexity of multidimensional searching. In this section, based on the array manifold matrix estimated in the previous section, an ESPRIT-based algorithm is proposed to deal with the problem of 2D DOA estimation with low computational complexity.
Based on first-order Taylor series expansion of
, the steering vector in Equation (4) can be approximated as:
where the terms after the second term are ignored. If standard deviations
and
are sufficiently small, the first-order Taylor series expansion is almost equal to
. Then, the received data of ID source can be rewritten as:
where
,
and
.
It can be seen from Equation (16) that the relationship between the received data of the ID source and
is linear; so is its partial derivatives. Thus, the received data of ID sources can be rewritten as:
where:
Then, the new array manifold matrix is expressed as:
the elements of
are functions of the incident signal, the path gains and angular deviations. It can be known that
is only determined by the nominal DOAs,
and
,
. Thus, we can obtain the DOA of ID sources from
, and the covariance matrix of
can be expressed as:
It is a diagonal matrix with , , , .
Based on Algorithm 2, the steering vectors of ID sources are separated. The estimator of
is obtained. Then, the estimator of snapshot data
for ID sources can be obtained by:
Then, the covariance matrix of
is expressed as:
where
. It can be known that
is a normal and positive diagonal matrix. In general,
is a full column rank matrix; the EVD of
is given by:
where
is a diagonal matrix with the entries of
large eigenvalues of
. The remaining
small eigenvalues of
equal to
. Their corresponding subspace are signal subspace
and noise subspace
, respectively.
. Based on Equations (22) and (23), we can know that:
Since
is a diagonal matrix, as well, there exists a nonsingular matrix
, which satisfies:
The linear relationship between and will be used to estimate the nominal DOAs.
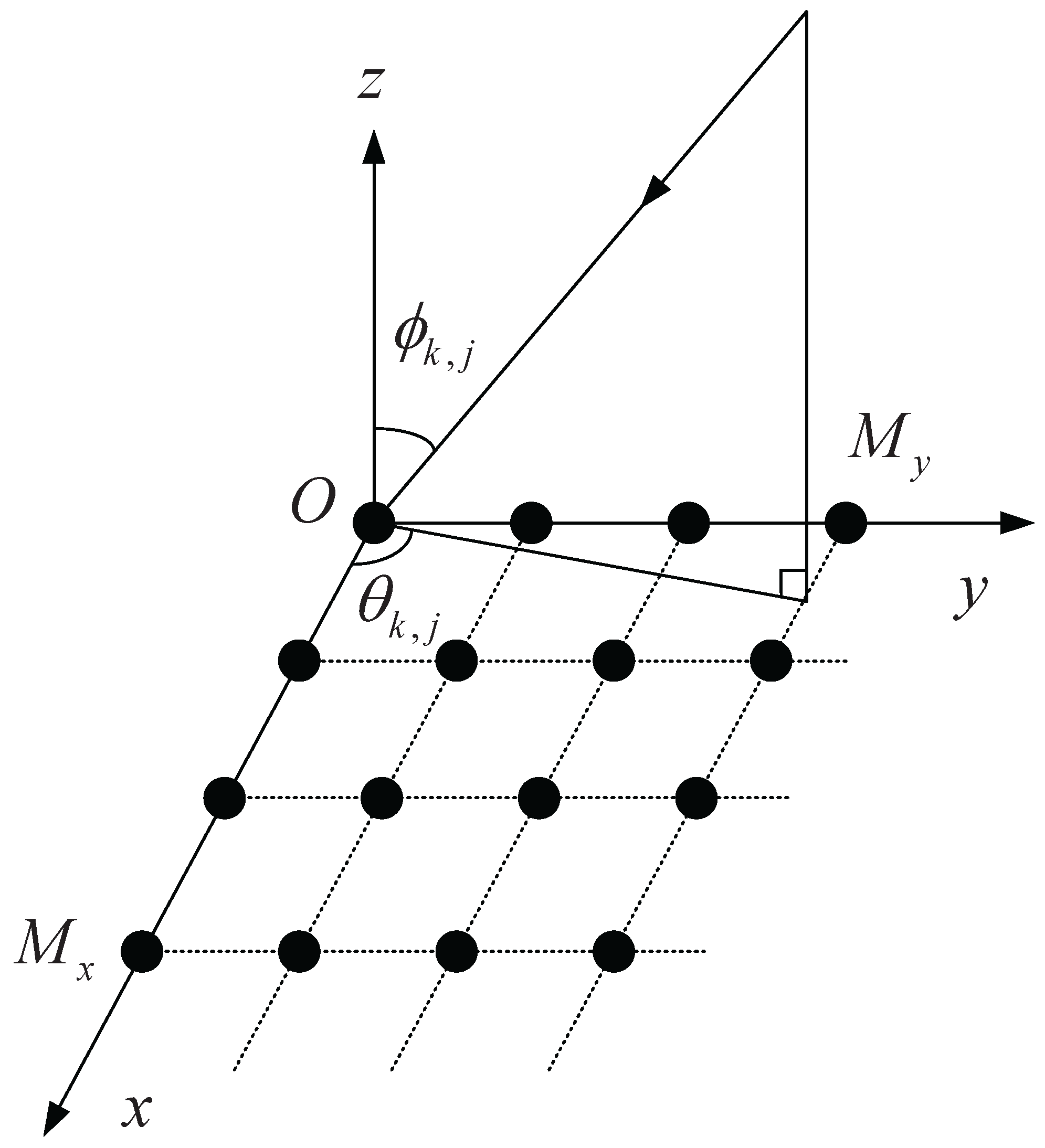
In order to obtain 2D angle estimation, azimuth and elevation, two rotation-invariant relationships have to be constructed [
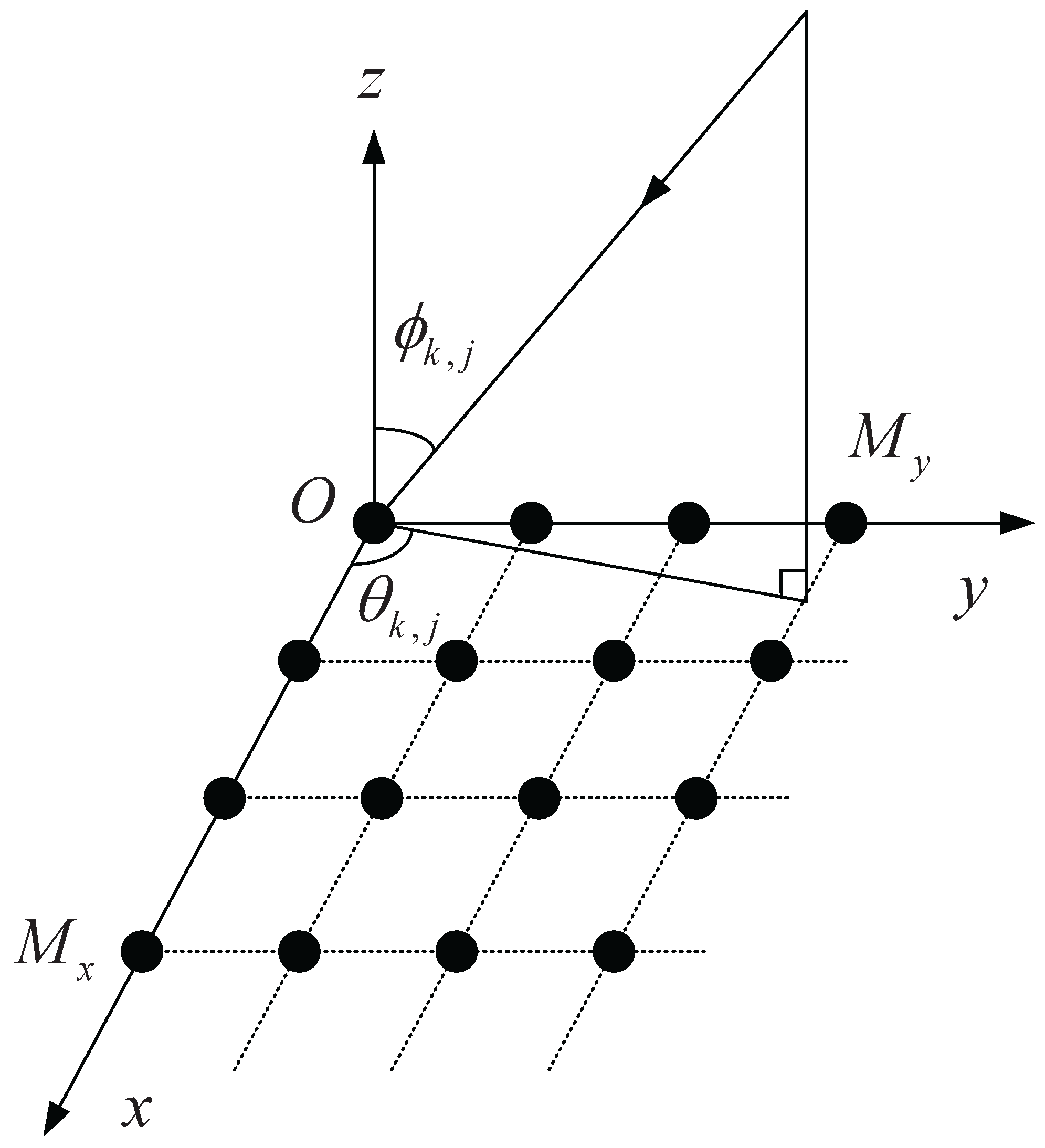
28]. As shown in
Figure 4, the whole URA is divided into three sub-arrays. Although more sub-arrays can be divided, the computation complexity increases rapidly in the VMIMO system. In order to reduce the computational complexity, only two rotation-invariant relationships are adopted. This is different from the conventional ESPRIT algorithm; this rotational-invariant relationship contains
and its partial derivatives. The array manifold matrices of sub-arrays have the same form as that of URA. The steering vector of the
l-th sub-array is defined as
,
and
.
In order to estimate the subspaces
,
and
of three sub-arrays, we need to construct a selection matrix as follows:
where
,
and
. In (26), the floor operator makes
,
when
. It can be seen that for the
m-th row of
, only the
-th entry is one, and the other entries are zeros. Thus,
assigns the
-th of
into the subspaces
,
and
belonging to three sub-arrays, respectively. This coincides with the relationships between the sub-arrays and the URA. Then, the estimators of subspaces
,
and
can be expressed as:
Proposition 1. The subspaces ,
and belonging to three sub-arrays have the relationships as follows:where: Thus, eigenvalues of
and
are diagonal entries of
and
, respectively. However,
and
are not diagonal matrices, but upper triangular matrices. Then, the conventional ESPRIT algorithm cannot be used directly. Therefore, in order to estimate the diagonal elements of
and
,
and
need to be estimated from the three subspaces
,
and
. According to Equation (28), the estimators of
and
can be obtained by employing the well-known total least-squares (TLS) method. Referring to the similar derivation in [
29], we construct a new matrix:
and the rank of
is
. The EVD of
is expressed as:
where
and
are eigenvectors and eigenvalues of
, respectively. Then,
can be partitioned into four block matrices as:
where
,
. The estimator of
is expressed as:
In order to estimate nominal DOAs, the EVD of
is expressed as:
where
and
are eigenvectors and eigenvalues of
, respectively. Similar to the process of estimating
, the estimator of
is expressed as:
where
and
are the eigenvectors and eigenvalues of
, respectively. However, the EVDs of
and
are completed separately. The eigenvalues between
and
have to be matched. Denote the
k-th diagonal entry of
as
,
. The eigenvectors of the identical source are strongly correlated; thus, we can construct the sequencing matrix
to match
and
. According to the coordinate of the maximal entry in the columns (or rows) of matrix
, we adjust the order of eigenvectors. Then, the parameter pairing is completed. The estimators of
and
, which are the eigenvalues
and
,
of
and
, respectively, are obtained. According to Equations (34) and (35), we have:
The estimators of the nominal 2D DOAs
and
for ID sources are given by:
where
. Thus, the 2D DOA estimation for ID sources is completed. The pseudo-code is summarized as Algorithm 3.
| Algorithm 3 The DOA Estimation Algorithm for ID Sources. |
- 1:
Estimate the covariance matrix according to Equation (25); - 2:
Take the EVD of ; is a diagonal matrix with the entries of ; large eigenvalues of , are the corresponding signal subspace; - 3:
Divide the URA into three sub-arrays; calculate the selection matrix according to Equations (A5)–(A7); construct two different rotational invariant relationships according to Equation (46); - 4:
Construct new matrix ; perform the EVD of Equation (31), partitioning the matrix into four blocks; the eigenvalues of and can be obtained according to Equation (33); - 5:
Estimate 2D DOA for ID sources according to Equations (38) and (39).
|
4.2. DOA Estimation for the CD Source
We first define three
selection matrices:
where
,
. The received data of the three sub-arrays for CD sources can be expressed as:
where
are additive noise vectors and
is a random process of the
k-th signal source.
The generalized steering vectors [
30] of the
k-th CD source belonging to three sub-arrays can be respectively expressed as:
where
.
Proposition 2. For a small angular extension, there is an approximate rotational invariant relationships between and ,
where .
Then, we can rewrite them in matrix form as:
where:
Based on Algorithm 2, the array manifold matrix for CD sources, which is denoted as
, can be estimated. By multiplying the selection matrices in Equation (40), the array manifold matrices of three sub-arrays can be respectively expressed as:
According to Equation (50), two rotational invariant relationships can be respectively expressed as:
The
k-th diagonal entries of
and
are defined as
and
, respectively. The estimators of the nominal 2D DOA
and
for CD sources are respectively given by:
where
. Thus, the 2D DOA estimation for CD sources are completed. The pseudo-code is summarized as Algorithm 4.
| Algorithm 4 The DOA Estimation Algorithm for CD Sources. |
- 1:
Define three selection matrices according to Equation (40); - 2:
Based on Algorithm 2, the array manifold matrix for CD sources is estimated; - 3:
Divide the URA into three sub-arrays; the array manifold matrix of these can be obtained by multiplying the corresponding selection matrix based on Equation (50); - 4:
Calculate the two rotational invariant relationships, and , according to Equation (51); - 5:
Estimate 2D DOA for CD sources according to Equations (52) and (53).
|
Thus, the 2D DOA estimation for ID and CD sources can be summarized as follows.
| Algorithm 5 The DOA Estimation Algorithm for Mixed Sources. |
- 1:
Separate the ID and CD sources based on SOBI algorithms Algorithm 1 and Algorithm 2; - 2:
Estimate the 2D DOA for ID sources according to Algorithm 3; - 3:
Estimate the 2D DOA for CD sources according to Algorithm 4;
|
Remark: The proposed algorithm can estimate 2D DOAs of ID or CD sources or joint ID and CD sources. If only ID or CD sources exist in the incident signals, the separation of ID and CD sources can be avoided. It is worth noting that the part of the proposed approach for 2D DOA estimation of ID sources can also be applied to other scenarios by exploiting the rotational invariance property of the array’s structure, such as uniform linear arrays (ULAs) and uniform cylindrical arrays (UCyA) [
13]. The part of the proposed approach for 2D-DOA estimation of the CD source has a similar characteristic,
i.e., the rotational invariance property of the antenna array’s structure is exploited. Thus, the proposed approach can be applied to other scenarios by exploiting the rotational invariance property of the array’s structure,
i.e., there exist three sub-arrays (the array’s structure can be arbitrary), which can construct two different rotational invariance relationships; the 2D DOA estimation for ID and CD sources can be achieved with little modification of the proposed algorithm.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}