
Development of Mobile Mapping System for 3D Road Asset Inventory

Abstract
:1. Introduction
2. Background
3. Methodology
3.1. Development of MMS That Meets the Requirements
3.1.1. Required Sensors
- One or more Cameras—Nikon 3200, 3300: Cameras capture pictures/video frames of the scene, thereby providing the asset managers with digital pictures portraying the conditions of assets.
- One or more laser scanners—Velodyne HDL-32E: LiDAR records 3D point data of the vicinity in the mapping frame, which, helps create 3D model of the scene and extract features.
- One or more GPS receivers, Gyros, Accelerometers—Geodetics, Geo-iNav: GPS-IMU integrated solution improves the frequency of recording positions from 1 Hz (GPS) to 125 Hz. The integrated navigation solution includes the position as well as the orientation of the vehicle (X, Y, Z, heading, roll and pitch).
- On-board computer—Brix: The software for controlling the functioning of the sensors are installed on the computer. It is important to Wi-Fi enable the computer, in order to connect it remotely using a laptop/tablet.
- External storage device—Samsung 1TB Solid State drive (SSD): The laser scanner can record up to 700,000 points per second. The navigation data is also quite voluminous. Since, the velocity of data recording is high, it is necessary to use a Solid state drive which provides high speed data logging.
Velodyne HDL-32E
Nikon Cameras—3200, 3300
3.1.2. Assembly of Sensors
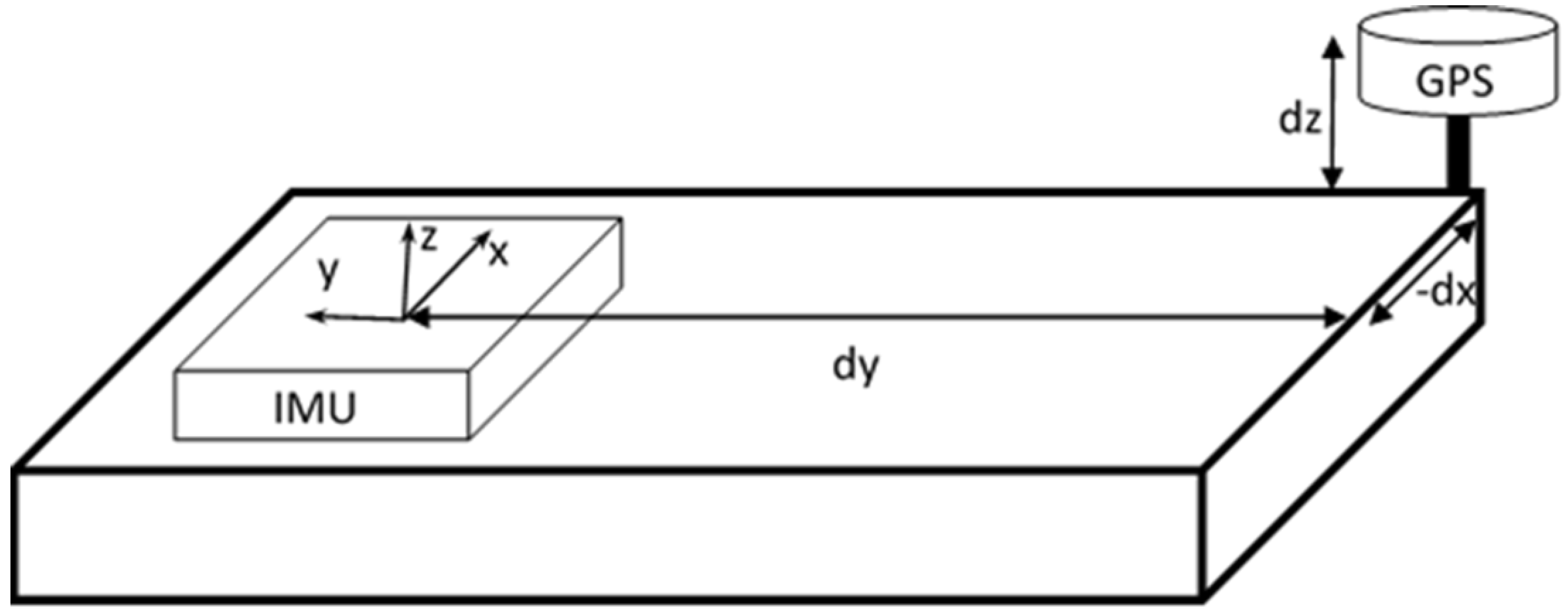
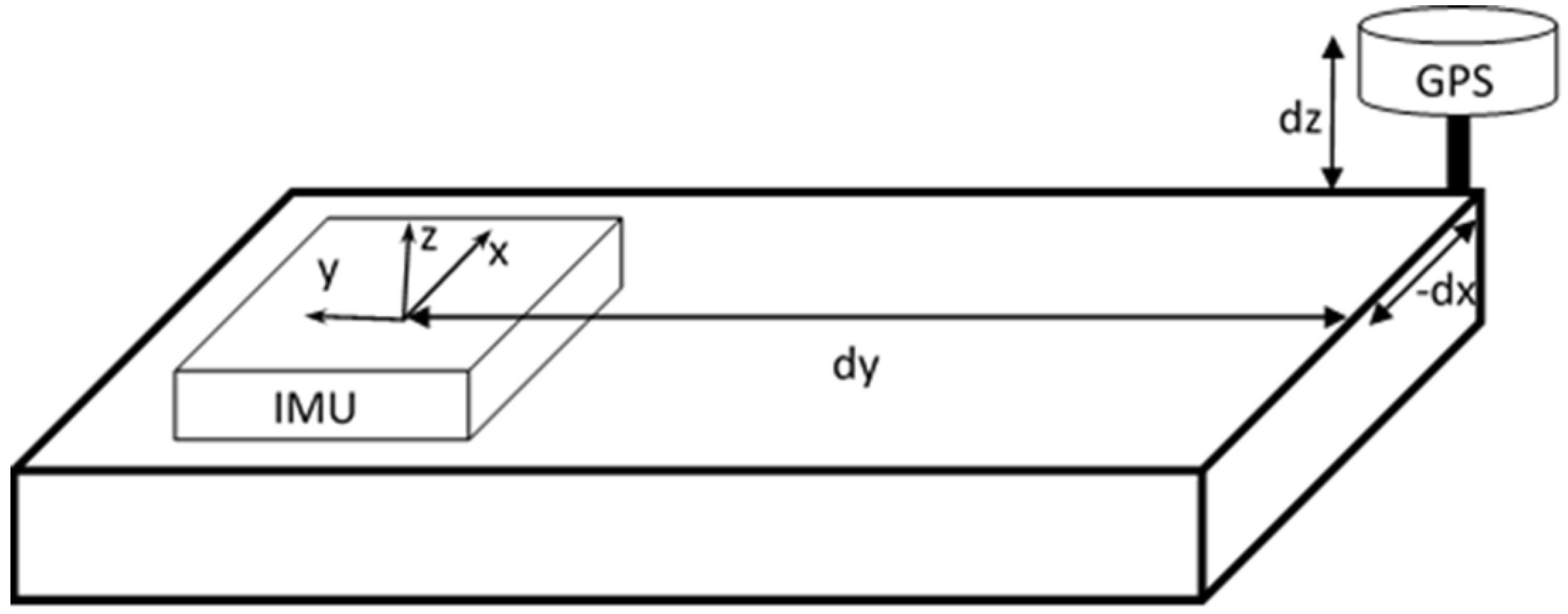
- GPS antenna center to the center of IMUThe origin and axes of the IMU are marked on its box. Since, the centers of IMU and GPS antenna are physically separated and identifiable, the distance between their centers can be manually measured along the X, Y and Z directions of the IMU as shown in Figure 2. The GPS antenna does not have any orientation. Hence, there are only translation components (dx, dy, dz). The body frame of the sensor platform has its positive X-axis aligned in the direction of the vehicle, positive Y-axis extends out on the side (right hand) and positive Z-axis pointing down. Based on current setup of the IMU, the negative X- axis of IMU is aligned along the forward direction of the body-frame, the Z- axis of IMU is set along the vertical axis of the body-frame but point up and the Y-axes of both body frame and IMU frame are aligned. Based on the specified mounting parameters, the GPS is located in IMU’s positive X direction. Hence, the displacement between IMU origin and GPS antenna along IMU’s X-axis should be subtracted from the sensor measurements. Thus, while computing the boresight misalignment parameters, the value of dx is negative. For similar reasons, dy and dz are positive. These translation values are used by the IMU while integrating the GPS-IMU data. The measurement should be accurate to 10 cm or less in order for the post-processing software to accurately determine the offset.
- LiDAR (origin from which laser pulse is triggered) to the center of IMUThe origin and axes of the IMU are marked on the box. On the other hand, it is difficult to manually identify the axes of the laser scanner. Hence, the translation and rotation between the two origins are determined by using a Terrestrial Laser Scanner (TLS). The TLS and the mobile mapping unit are placed on a levelled plane. Both the mobile laser scanner and the TLS scans the vicinity. The mobile scanner is fine scanned by the TLS such that the IMU markings are clearly visible on the point cloud. Points from the TLS point cloud belonging to the IMU center and IMU axes are picked. The origin and axes of the TLS point cloud are shifted to the IMU center and axes of the mobile mapping system. Since, the scale component is fixed, 3-D Helmert rigid body transformation is applied [35]. Now, the translation and rotation between the point clouds from mobile laser scanner and TLS (centered at IMU) are measured using Iterative Closest Point (ICP) methodology introduced by [36,37]. One implementation of ICP as an open source software—CloudCompare [38] is used. The translation and rotation values determine the boresight misalignment between IMU and Laser Scanner.
- Camera Calibration [39,40,41]
- Interior Orientation—Interior orientation is a part of camera calibration where the measurements relating to the camera, such as the perspective center and focal length are determined. It also involves finding the scaling, skew factors and lens distortion. The interior orientation is performed in lab conditions by clicking pictures of a regular grid from different angles. By transforming the image pixels to real world lengths, the metrics of imaging can be determined.
- Exterior Orientation—Exterior orientation parameters change for every picture. It is the position and orientation of the camera with respect to a coordinate system, while capturing each photo. Space Resection is a conventional method used to determine exterior orientation parameters. It involves the measurement of ground control points and digitizing them on overlapping images to determine the camera position (X, Y, Z) and orientation (omega, phi, kappa).
3.2. Co-Registration of Multi-Sensor Data
3.2.1. Trajectory Interpolation
3.2.2. Time Synchronization
- 1
- Modified date (timestamp)—Timestamp recorded when the video was stored to the SD card (Assumed as the finishing time of the video)
- 2
- Duration of the video
- 3
- Frames per second (fps)
3.2.3. Direct Geo-Referencing
- PG—Coordinate of the captured point in ECEF system,
- pECEF—GNSS sensor position in global ECEF system,
- RlG− Rotation matrix from origin of WGS system to origin of local frame,
- longi, lati are geodetic coordinates of pECEF,
- Rba− Rotation matrix from body frame to local frame,
- Rsb—Rotation matrix from scanner to IMU (b-frame)—boresight rotation matrix
- Ps—Coordinate of the point in scanner frame (as recorded by Laser Scanner)
- dTsb—Offset between scanner frame and IMU center (b-frame)—boresight translation.
3.2.4. Geo-Referencing Images
3.2.5. Quality Check Methodology
3.3. Processing the Data
3.3.1. Filtering of Data
3.3.2. Automatic Bare-Earth for Cross Section
3.4. Creation of GIS Database for Asset Management
- Ability to manage voluminous data efficiently—large point clouds
- Maintain consistency between multi-sensor data—images, LiDAR point clouds, thermal/hyperspectral data etc.
- Appropriate versioning of collected datasets.
- Implementation of basic automatic feature extraction algorithms and interface to manually digitize features.
- Relational database design to store assets and their spatial relationships.
- Visualization, rendering and fluid user interface.
4. Experiments
4.1. Extraction Methodology
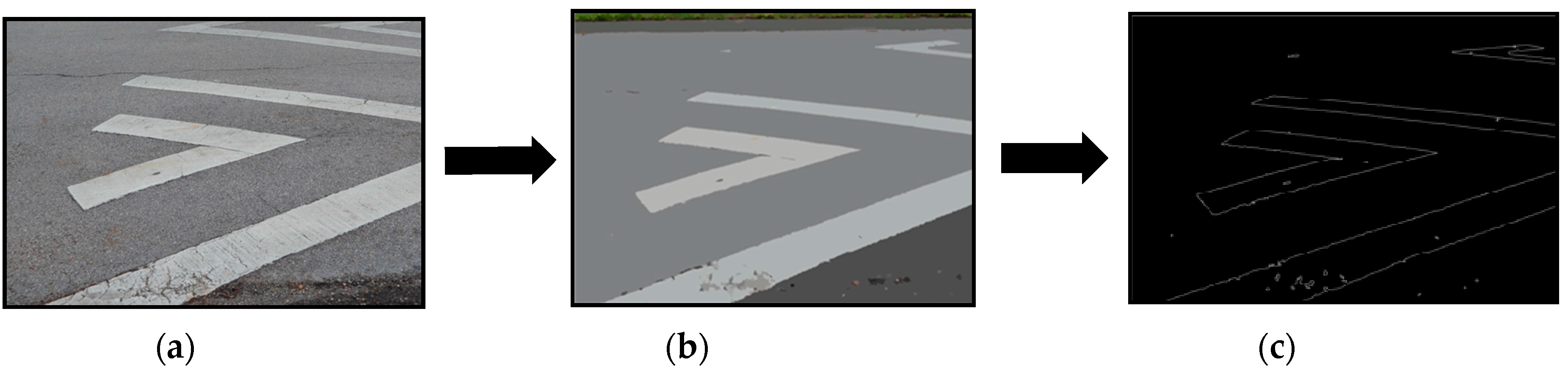
4.1.1. Automatic Road Marking Extraction
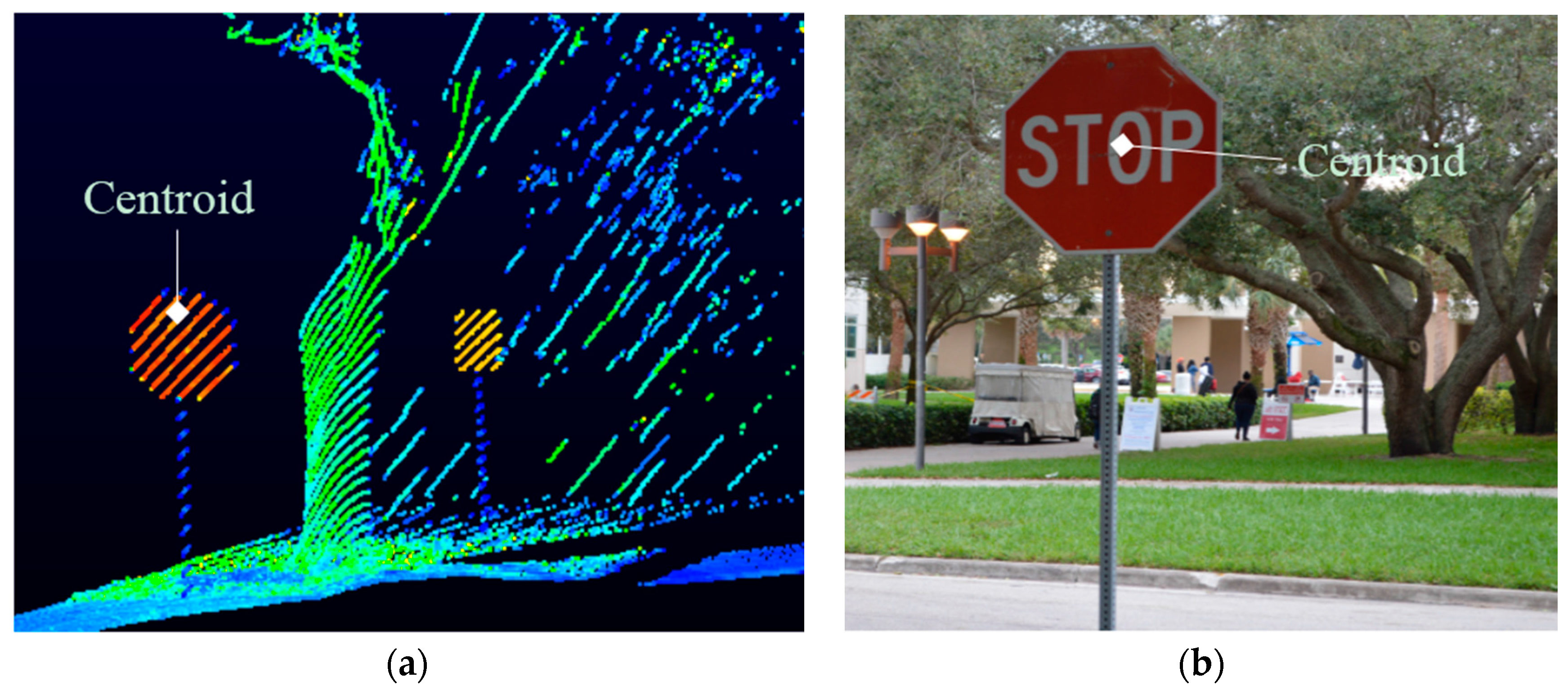
4.1.2. Road Sign Extraction
4.1.3. Extraction of Other Assets
5. Discussion
- Less laborious data collection process.
- Possibility of frequent data collection for constantly changing scenarios
- Data can be reviewed for condition assessment at the comfort of office
- Minimum field work involved
- Direct and accurate elevation information from mobile LiDAR data
- Easy to conduct survey over inaccessible areas.
- Minimum/nil hindrance to commuters and traffic.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Olsen, M.J. NCHRP 15-44 Guidelines for the Use of Mobile LIDAR in Transportation Applications; National Cooperative Highway Research Program: Washington, DC, USA, 2013; p. 243. [Google Scholar]
- Lange, A.F.; Gilbert, C. Using GPS for GIS data capture. In Geographical Information Systems, 2nd ed.; Longley, P.A., Goodchild, M.F., Maguire, D.J., Rhind, D.W., Eds.; John Wiley and Sons: New York, NY, USA, 1998; pp. 467–479. [Google Scholar]
- Laflamme, C.; Kingston, T.; McCuaig, R. Automated mobile mapping for asset managers. In Proceedings of the 23th International FIG Congress, Munich, Germany, 8–13 October 2006.
- He, G.; Orvets, G. Capturing road network data using mobile mapping technology. Proc. Int. Arch. Photogramm. Remote Sens. 2000, 33, 272–277. [Google Scholar]
- Findley, D.J.; Cunningham, C.M.; Hummer, J.E. Comparison of mobile and manual data collection for roadway components. Transp. Res. C Emerg. Technol. 2011, 19, 521–540. [Google Scholar] [CrossRef]
- Donatis, M.D.; Bruciatelli, L. MAP IT: The GIS software for field mapping with tablet pc. Comput. Geosci. 2006, 32, 673–680. [Google Scholar] [CrossRef]
- Zingler, M.; Fischer, P.; Lichtenegger, J. Wireless field data collection and EO–GIS–GPS integration. Comput. Environ. Urban Syst. 1999, 23, 305–313. [Google Scholar] [CrossRef]
- Pundt, H. Field data collection with mobile GIS: Dependencies between semantics and data quality. GeoInformatica 2002, 6, 363–380. [Google Scholar] [CrossRef]
- Tao, V.C. Mobile mapping technology for road network data acquisition. J. Geospat. Eng. 2000, 2, 1–14. [Google Scholar]
- Klaus, P.; Schwarz, N.; El-Sheimy, N. Mobile mapping systems—State of the art and future trends. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 35, 759–768. [Google Scholar]
- Schwarz, K.P.; El-Sheimy, N. Kinematic Multi-Sensor Systems for Close Range Digital Imaging. Int. Arch. Photogramm. Remote Sens. 1996, 31, 774–785. [Google Scholar]
- Williams, K.; Olsen, M.; Roe, G.; Glennie, C. Synthesis of Transportation Applications of Mobile LIDAR. Remote Sens. 2013, 5, 4652–4692. [Google Scholar] [CrossRef]
- Cahalane, C.; Lewis, P.; Mcelhinney, C.; Mccarthy, T. Optimising Mobile Mapping System Laser Scanner Orientation. ISPRS Int. J. Geo Inf. 2015, 4, 302–319. [Google Scholar] [CrossRef]
- Kumar, P.; Mcelhinney, C.P.; Lewis, P.; Mccarthy, T. Automated Road Markings Extraction from Mobile Laser Scanning Data. Int. J. Appl. Earth Observ. Geoinf. 2014, 87, 125–137. [Google Scholar] [CrossRef]
- Van Geem, C.; Gautama, S. Mobile mapping with a stereo-camera for road assessment in the frame of road network management. In Proceedings of the 2nd International Workshop “The Future of Remote Sensing, Antwerp, Belgium, 17–18 October 2006.
- Kukko, A.; Kaartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform Mobile Laser Scanning: Usability and Performance. Sensors 2012, 12, 11712–11733. [Google Scholar] [CrossRef]
- Meruani, A.; Woodruff, G.W. Tweel™ Technology Tires for Wheelchairs and Instrumentation for Measuring Everyday Wheeled Mobility. Master’s Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2006. [Google Scholar]
- Hunter, G.; Cox, C.; Kremer, J. Available online: http://www.isprs.org/proceedings/XXXVI/1-W44/papers/Hunter_full.pdf (accessed on 15 November 2015).
- Madeira, S.; Gonçalves, J.A.; Bastos, L. Sensor Integration in a Low Cost Land Mobile Mapping System. Sensors 2012, 12, 2935–2953. [Google Scholar] [CrossRef] [PubMed]
- Silva, J.F.C.D.; Camargo, P.D.O.; Gallis, R.B.A. Development of A Low-Cost Mobile Mapping System: A South American Experience. Photogramm. Rec. Photogramm. Rec. 2003, 18, 5–26. [Google Scholar] [CrossRef]
- Ellum, C.M.N.; El-Sheimy, N. A mobile mapping system for the survey community. In Proceedings of the 3rd International Symposium on Mobile Mapping Technology (MMS 2001), Cario, Egypt, 3–5 January 2001.
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A Low-Cost Multi-Sensoral Mobile Mapping System and Its Feasibility for Tree Measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Lam, J.; Kusevic, K.; Mrstik, P.; Harrap, R.; Greenspan, M. Urban scene extraction from mobile ground based lidar data. In Proceedings of the 5th International Symposium on 3D Data, Processing, Visualization & Transmission (3DPVT 2010), Paris, France, 17–20 May 2010.
- Vosselman, G. Point Cloud Segmentation for Urban Scene Classification. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013. [Google Scholar] [CrossRef]
- Zhou, L.; Vosselman, G. Mapping Curbstones in Airborne and Mobile Laser Scanning Data. Int. J. Appl. Earth Observ. Geoinf. 2012, 18, 293–304. [Google Scholar] [CrossRef]
- Manandhar, D.; Shibasaki, R. Auto-extraction of urban features from vehicle-borne laser data. ISPRS J. Photogramm. Remote Sens. 2002, 34, 650–655. [Google Scholar]
- Sun, H.; Wang, C.; El-Sheimy, N. Automatic Traffic Lane Detection for Mobile Mapping Systems. In Proceedings of the 2011 International Workshop on Multi-Platform/Multi-Sensor Remote Sensing and Mapping, Xiamen, China, 10–12 January 2011.
- Tao, C.; Li, R.; Chapman, M.A. Automatic reconstruction of road Centerlines from mobile mapping image sequences. Photogramm. Eng. Remote Sens. 1998, 64, 709–716. [Google Scholar]
- Pu, S.; Rutzinger, M.; Vosselman, G.; Elberink, S.O. Recognizing Basic Structures from Mobile Laser Scanning Data for Road Inventory Studies. ISPRS J. Photogramm. Remote Sens. 2011, 66, S28–S39. [Google Scholar] [CrossRef]
- Brenner, C. Extraction of Features from Mobile Laser Scanning Data for Future Driver Assistance Systems. In Advances in GIScience; Lecture Notes in Geoinformation and Cartography; Springer: Berlin, Germany; Heidelberg, Germany, 2009; pp. 25–42. [Google Scholar]
- Schultz, A.J. The Role of GIS in Asset Management: Integration at the Otay Water Distict. Ph.D. Thesis, University of Southern California, Los Angeles, CA, USA, 2012. [Google Scholar]
- Habib, A.; Bang, K.I.; Kersting, A.P.; Chow, J. Alternative Methodologies for LiDAR System Calibration. Remote Sens. 2010, 2, 874–907. [Google Scholar] [CrossRef]
- Mostafa, M.M.R. Boresight calibration of integrated inertial/camera systems. In Proceedings of the International Symposium on Kinematic Systems in Geodesy, Geomatics and Navigation (KIS 2001), Banff, AB, Canada, 5–8 June 2001.
- Rieger, P.; Studnicka, N.; Pfennigbauer, M.; Zach, G. Boresight Alignment Method for Mobile Laser Scanning Systems. J. Appl. Geod. 2010, 4, 13–21. [Google Scholar] [CrossRef]
- Watson, G. Computing Helmert Transformations. J. Comput. Appl. Math. 2006, 197, 387–394. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object Modeling by Registration of Multiple Range Images. In Proceedings of the IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991.
- Besl, P.J.; McKay, D.N. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- CloudCompare—Open Source Project. CloudCompare—Open Source Project. Available online: http://www.danielgm.net/cc/ (accessed on 10 November 2015).
- Zhang, Z. Flexible Camera Calibration by Viewing a Plane from Unknown Orientations. In Proceedings of the IEEE 7th International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999.
- Scott, P.J. Close Range Camera Calibration: A New Method. Photogramm. Rec. 1976, 8, 806–812. [Google Scholar] [CrossRef]
- Bouguet, J.-Y. Camera Calibration Toolbox for Matlab. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/ (accessed on 14 December 2015).
- Gontran, H.; Skaloud, J.; Gilliéron, P.Y. A mobile mapping system for road data capture via a single camera. In Advances in Mobile Mapping Technology; Taylor & Francis Group: London, UK, 2007; pp. 43–50. [Google Scholar]
- Atkinson, K. Modelling a Road Using Spline Interpolation. Reports on Computational Mathematics. Available online: http://homepage.math.uiowa.edu/~atkinson/ftp/roads.pdf (accessed on 15 October 2015).
- Ellum, C.; El-Shelmy, N. Land-based mobile mapping systems. Photogramm. Eng. Remote Sens. 2002, 68, 13–28. [Google Scholar]
- Crammer, M.; Stallmann, D.; Haala, N. Direct Georeferencing Using GPS/Inertial Exterior Orientations for Photogrammetric Applications. Int. Arch. Photogramm. Remote Sens. 2000, 33, 198–205. [Google Scholar]
- Mostafa, M.M.R.; Schwarz, K.P. A Multi-Sensor System for Airborne Image Capture and Georeferencing. Photogramm. Eng. Remote Sens. 2000, 66, 1417–1424. [Google Scholar]
- Nagai, M.; Chen, T.; Shibasaki, R.; Kumagai, H.; Ahmed, A. UAV-Borne 3-D Mapping System By Multisensor Integration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 701–708. [Google Scholar] [CrossRef]
- Hauser, D.L. Three-Dimensional Accuracy Analysis of a Mapping-Grade Mobile Laser Scanning System. Master’s Thesis, The University of Houston, Houston, TX, USA, August 2013. [Google Scholar]
- TIGER/Line Shapefiles [Machine-Readable Data Files]/Prepared by the U.S. Census Bureau. Available online: https://www.census.gov/geo/maps-data/data/tiger-line.html (accessed on 30 November 2015).
- Canny, J. A Computational Approach to Edge Detection. Read. Comput. Vis. 1987, PAMI-8, 184–203. [Google Scholar]
- Landa, J.; Prochazka, D. Automatic Road Inventory Using LiDAR. Procedia Econ. Financ. 2014, 12, 363–370. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Asset | Attributes (Format/Type) |
|---|---|
| Sidewalk | Width (Double) |
| Curb Height (Double) | |
| Length of the segment (Double) | |
| Availability of ramp (Boolean—true/false) | |
| Condition (Integer; range—1–10) | |
| Comments (Text) | |
| Geometry (Polygon) | |
| Median | Width (Double) |
| Height (Double) | |
| Length of the segment (Double) | |
| Condition (Integer; range: 1–10) | |
| Comments (Text) | |
| Geometry (Polygon) | |
| Guard Rail | Height (Double) |
| Length of the segment (Double) | |
| Condition (Integer; range: 1–10) | |
| Comments (Text) | |
| Geometry (Line) | |
| Fencing | Height (Double) |
| Length of the segment (Double) | |
| Condition (Integer; range: 1–10) | |
| Comments (Text) | |
| Geometry (Line) | |
| Lighting | Height (Double) |
| Type (Text) | |
| Condition (Integer; range: 1–10) | |
| Comments (Text) | |
| Geometry (Point) | |
| Landscape Areas | Area of landscaping (Double) |
| Condition (Integer; range: 1–10) | |
| Comments (Text) | |
| Geometry (Polygon) | |
| Delineators | Height (Double) |
| Type of Delineator (Text) | |
| Condition (Integer; range: 1–10) | |
| Comments (Text) | |
| Geometry (Point) | |
| Lanes | Type of striping (Text) |
| Condition (Integer; range: 1–10) | |
| Comments (Text) | |
| Geometry (Line) | |
| Road Markings | Type of striping (Text) |
| Condition (Integer; range: 1–10) | |
| Comments (Text) | |
| Geometry (Line) | |
| Road Signs/Boards | Message (Text) |
| Type of sign (Text) | |
| Condition (Integer; range: 1–10) | |
| Comments (Text) | |
| Geometry (Point) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sairam, N.; Nagarajan, S.; Ornitz, S. Development of Mobile Mapping System for 3D Road Asset Inventory. Sensors 2016, 16, 367. https://doi.org/10.3390/s16030367
Sairam N, Nagarajan S, Ornitz S. Development of Mobile Mapping System for 3D Road Asset Inventory. Sensors. 2016; 16(3):367. https://doi.org/10.3390/s16030367
Chicago/Turabian StyleSairam, Nivedita, Sudhagar Nagarajan, and Scott Ornitz. 2016. "Development of Mobile Mapping System for 3D Road Asset Inventory" Sensors 16, no. 3: 367. https://doi.org/10.3390/s16030367
APA StyleSairam, N., Nagarajan, S., & Ornitz, S. (2016). Development of Mobile Mapping System for 3D Road Asset Inventory. Sensors, 16(3), 367. https://doi.org/10.3390/s16030367